目标保障中的STK 建模与仿真方法研究
2021-05-06 06:11:52李云龙欧阳春雷成加龙吴长宇武文斌
火力与指挥控制 2021年3期
李云龙,欧阳春雷,成加龙,吴长宇,武文斌
(1.解放军66136 部队,北京 100042;2.解放军66018 部队,天津 300300;3.解放军66061 部队,北京 100042)
0 引言
建模与仿真方法,是针对一定的应用目的,对原型的相关特征进行抽象提取,建立原型的“模仿物”,从而对重点关注的原型功能进行真实还原的过程[1]。在军事活动中,建立作战模型是研究战场行动客观规律的重要手段,要求所建模型必须符合战场实际,能反映战场行动的基本特征,所揭示的基本规律亦能指导战场行动。
通过作战模型来研究作战活动规律的方法是作战模型方法[2]。作战模型通常可以分为战场环境模型和战场实体目标模型,战场环境模型主要包括陆地、海洋、大气以及电磁等环境数据,战场实体目标模型主要指与战场行动密切相关的作战目标及体系。通常情况下,战场实体目标的活动离不开战场环境的支撑,战场环境亦会对战场实体目标的作战能力产生影响。因此,为了最大程度地体现目标之间的关联,需要借助理想的仿真平台,对单个目标、目标系统以及目标体系的特征和功能进行建模。
STK(System ToolK it,系统工具包)是由美国分析图形公司(A G I)开发的一款功能强大的商业分析软件。该软件最初应用于仿真航天、侦察、雷达、电子对抗等任务,随着软件的升级,STK 已足够支持陆、海、空、天、电等各种复杂任务的全时空和全领域分析和表现,其精确的分析结果可用于评估作战方案和预测作战效果[3]。STK 包含的二三维可视化模块,不仅可以清晰地显示太空环境、空中和地面资源、遥感器、卫星轨道等空间实体及其工作过程,还支持三维模型的关节运动仿真,增强了显示效果。另外,对于特定的分析任务,STK 专业版还提供了高级分析模块,可以解决通信分析、雷达分析、覆盖分析、轨道机动、精确定轨、导弹设计、空间飞行器分析、实时操作等问题[4]。
1 STK 中常用的建模与仿真方法
利用STK 构建的模型一般分为物理类模型和功能类模型。物理类模型除了模拟原型的大小、位置、方向、颜色等属性外,还包括模拟组成原型的各部位组件的关节活动;功能类模型主要是模拟原型系统的功能特征,如天基卫星的预警能力、陆基雷达的探测能力、反导武器的拦截能力等,以作为分析评估目标体系作战能力的基础。通常我们所研究的战场实体目标类对象需要同时覆盖物理级和功能级参数,但如果仅作展示用,则只构建物理类模型即可。
1.1 物理类模型构建方法
STK 构建物理类模型的方法主要有两种,一是通过三维模型软件制作模型,然后保存成STK 支持的格式供其调用,其转换流程如图1 所示[5]。
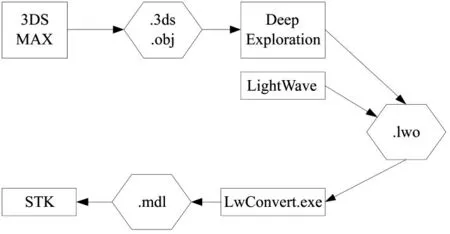
图1 STK 三维模型的转换流程示意图
通过上述转换即可生成STK 支持的三维模型格式,例如所构建的导弹模型在STKModelView 中效果如图2 所示,通过3DsMax 建立并转换为STK支持的.mdl导弹模型如图3 所示。
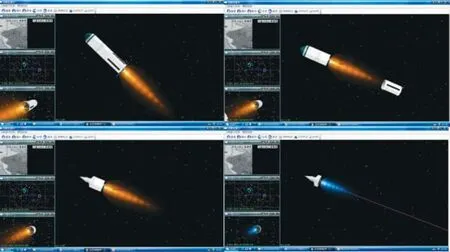
图2 STK 构建的导弹模型在STKModelView 中的效果

图3 通过3DsMax 建立并转换为STK 支持的.mdl导弹模型
另一种是利用STK 建模语言建立模型文件。STK/VO 模块为STK 提供了出色的三维显示环境,模型开发环境MDE (Model Development Environment)是随VO 模块一起提供的3D 模型编辑工具。建立3D 模型的方法是修改现成的模型文件,将它重命名为新文件,然后使用标准的文本编辑器打开进行编辑。所有3D 模型文件均为标准的ASCII文件,文件扩展名为.mdl。3D 模型文件为分级结构,由实体和组件构成。组件包含定义组件的实体(如多边形或圆柱),描述某些内容的参数(如颜色和亮度),或被其他组件引用的实体。对于分级结构来说,组件是所有实体和子组件的父级。例如飞行器文件Vehicle.mdl包含由实体和组件构成的简单树形结构,如图4 所示。

图4 STK 的.mdl三维模型的分级结构图
另外,为了能够支持装备作战过程中的各种控制动作,如导弹分离、发动机点火等动作,在建立.mdl模型时,需要加入.mdl模型格式所支持的Articulation 关节信息。STK 引擎加载后的模型,通过外部程序指令Add Articulation 或脚本文件来驱动三维模型的关节活动(平移、旋转、缩放)和调整三维模型的纹理变化(贴图、颜色),如图5 所示。
1.2 功能类模型构建方法
构建功能类模型通常是在物理类模型的基础上添加功能级参数,从而实现对模型特征的分析计算。STK 自带的功能模型涵盖卫星、雷达、天线、传感器、飞机、舰船、通信、电抗等信息化装备,模型之间还支持功能与任务的叠加。
以陆基预警雷达为例,其功能模型Radar可以直接添加在默认设施Facility 上,也可以先添加到传感器模型Sensor上,再附属至Facility。如果Radar直接附属至Facility,则Radar的物理级参数(大小和位置)由其父级Facility 直接决定,功能级参数(探测距离、预警时间、跟踪时间等)由自身参数框设置;如果Radar先添加到Sensor上,再附属至Facility,其物理级参数仍由Facility 决定,功能级参数由其自身参数框设置的同时也受Sensor的约束限制,即Radar功能参数集应被包含在Sensor功能参数集内。
STK 提供了外部程序接口,可利用STK X在C++/C#/Java/Matlab/MFC 等应用程序中嵌入STK 的功能,因此,可以通过在外部构建功能模型或直接将已有功能模型导入STK,并与STK 自带的功能模型叠加使用。通常将主体功能模型分解为若干子功能模型,并根据作战进程设计统一的子模型工作流程,最后将各子模型的仿真计算结果汇总作为评估各阶段作战效果的依据。以陆基预警雷达为例,将其主体功能分解并构建以下核心功能模型:
1)雷达与目标几何交互关系模型:依据雷达与目标在空间中的位置,以及雷达传感器的搜索空域,判断目标是否进入雷达探测范围;
2)雷达最大搜索距离计算模型:依据目标位置、雷达反射截面积等信息,确定当前雷达的最大搜索距离,进而结合指控系统引导信息确定雷达搜索空域(搜索阶段全空域/跟踪阶段小空域);
3)雷达信噪比计算模型:依据雷达传感器性能参数以及目标雷达散射截面积,计算雷达信噪比;
4)雷达发现概率计算模型:由雷达传感器信噪比计算其对目标的发现概率,在此基础上,进行概率仿真,模拟雷达传感器对目标的探测过程,确定是否发现目标;
5)雷达识别模型:依据不同目标的R CS 特性、一维距离像等信息的不同,识别真假目标;
6)雷达传感器测量模型:若雷达发现目标,则依据目标在雷达探测坐标系中的位置,计算雷达对目标的测量数据。
基于以上核心功能模型的运作机理,可归纳总结陆基预警雷达工作流程如图6 所示。
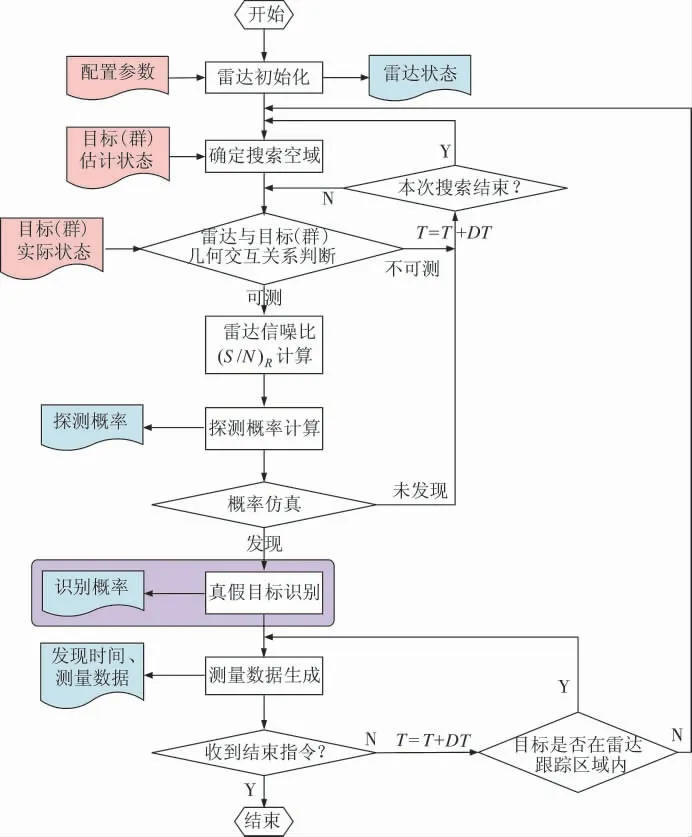
图6 陆基预警雷达工作流程图
2 战场环境建模与仿真
战场环境是战场实体目标展开活动的平台,对战场环境建模与仿真是描述作战活动的前提。战场环境涵盖陆地、海洋、大气以及电磁等环境,每一类战场环境所包含的要素复杂且不尽相同,对战场环境建模的重点有二:一是把握仿真中人机交互所需的可视化效果;二是实现对战场实体目标作战能力有重要影响的战场环境因素的定量描述。
以陆地环境为例,对陆上战场实体目标活动有影响的主要是地形地貌因素,地貌的起伏状态会直接影响雷达的照射范围、电磁波的传输距离、地面汽车和坦克以及低空飞机的运动轨迹等,因此,在二三维视窗实现地形地貌的可视化,可直接观察判断其对陆上实体目标作战能力的影响及变化。
STK 的地形模块主要采用精度较高的SRTM 3(Shuttle Radar Topography Mission)地形产品数据,分辨率精度为90 m,利用Global Mapper和STK 集成的Imagery and Terrain Converter进行数据整合和格式转换后才能得到有用的地形数据[6]。地貌数据主要利用水经注万能地图下载器下载,可以自由框选所需区域的地貌图层,并保存成带有地理坐标信息的GeoJPG、GeoTIFF 等格式的图片,该图片可以直接利用Imagery and Terrain Converter转换成有用的地貌数据。STK 针对3D 视窗可显示的专有地形数据格式包括PDTT,针对2D 和3D 视窗可显示的地貌数据,包括专有格式PDTTX 以及开放格式JP2(JPEG 2000)。图7 为利用Global Mapper和Imagery and Terrain Converter进行地形地貌数据转化并导入STK 场景的过程。

图7 利用Global Mapper和Imagery and Terrain Converter进行地形地貌数据转化并导入STK 场景的过程
通过将地形地貌产品数据导入STK 场景,可提高区域图层的分辨率,图8(a)为区域地形地貌图,图8(b)为导入地形地貌产品数据后区域高分辨率地貌图,图8(c)为对应区域的高分辨率放大地形图。
研究雷达系统(体系)的作战能力,主要衡量雷达探测范围、预警时间、跟踪时间等参数指标[7-8]。以探测范围为例,受地形影响较大,尤其是在地势崎岖、环境多变地区。下页图9(a)、(b)为2D、3D 视窗显示的某区域雷达组网对3 000 m 高空目标的探测范围及其受地形遮蔽影响。雷达组网是通过合理部署多部不同工作能力的雷达,经由中心站统一调配,以充分发挥各单部雷达的威力,并利用信息融合技术,将组网内各单部雷达侦察的有用信息有机统一,从而形成最终的雷达情报。利用STK 自带的Radar模块可计算雷达的探测范围,表1 为部分雷达对3 000 m 高空目标的最远探测范围。

图8 地形地貌图
由图可见,在地势崎岖、地面遮蔽物较多的一侧雷达探测范围受限,在地势平坦、地面遮蔽物较少的一侧雷达探测范围基本不受影响。因此,陆地环境中的地形地貌因素对陆基雷达探测能力的影响不可忽视,同时也表明考虑战场环境对战场实体目标作战能力的影响十分重要。

表1 部分雷达对3 000 m 高空目标的最远探测范围

图9 2D、3D 视窗显示的某区域雷达组网对3 000 m 高空目标的探测范围及其受地形遮蔽影响
3 战场实体目标建模与仿真
构建战场实体目标模型是模拟战场行动的重要组成部分,但因目标分类复杂,对各类目标体系中的单个目标和目标系统同时构建物理类模型和功能类模型,则是一个长期积累的过程。
3.1 战场实体目标物理类模型构建
根据构建物理类模型的方法构建战场实体目标物理模型,并通过STK 平台二三维视窗显示模型的大小、位置、方向、颜色等属性,如需显示装备作战过程中的各种控制动作,则通过外部程序指令Add Articulation 或脚本文件来驱动三维模型的关节活动,图10 展示了以STK 平台构建的典型战场实体目标物理模型。
3.2 战场实体目标功能类模型构建
构建战场实体目标功能模型,主要从构建单个目标模型出发,通过把同类型单个目标模型组合形成目标系统模型,再将不同目标系统模型组合形成目标体系模型。不同类型的目标系统或目标体系之间可以进行功能和任务的叠加,即实现目标之间的基于功能属性的作战对抗,这一过程可以通过STK平台仿真或回放,并利用STK 自带的或导入外部已有功能模型进行体系对抗能力的分析解算。
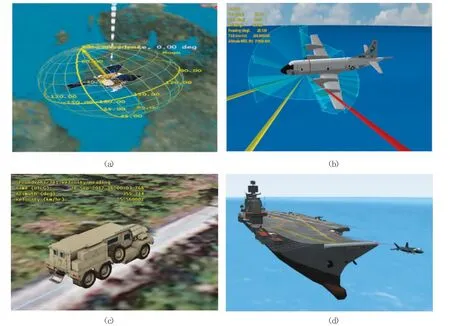
图10 STK 三维视窗显示的战场实体目标物理模型
以雷达系统为例,研究其对空中飞行器的作战能力。这一对抗场景中包含两个功能模型:一是飞行器的飞行路径规划模型;二是雷达系统对飞行器的探测模型[9-10]。首先,基于STK 自带的Aircraft模型,创建飞行器飞行任务,在自身参数框里设置飞行参数,如图11 所示。同时,基于STK 自带的Radar模型,构建雷达系统即雷达组网模型,如图9(a)所示。其次,建立雷达组网模型与飞行器模型的“可视”关系。通过Access功能同时建立雷达组网内各单部雷达与飞行器的链接关系,图12 所示为2 000 m高空的飞行器飞行至雷达组网上空时,被雷达组网内一单部雷达首先探测到的场景。通过Compute Access功能可以计算各单部雷达对飞行器的探测时间、跟踪时间和探测角度、探测距离,如图13 所示。

图11 2 000 m 高空飞行器飞行路径规划设置

图12 雷达组网内一单部雷达首先探测到2 000 m 高空飞行器的场景
依据计算结果对模型性能进行分析,由图13可见,部分雷达与飞行器的链接为空,即探测时间和探测距离均为零,说明该飞行器模型设置的飞行轨迹,并未全部进入到雷达的探测范围。雷达对飞行器的探测距离呈“V”字型分布变化,说明随着飞行器与雷达的距离由近及远,探测距离先减小后增大。通过改变飞行器模型中的飞行高度参数,还可以计算各单部雷达对不同高度飞行器的探测距离,如表2 所示。

图13 雷达组网内各单部雷达对飞行器的探测时间、跟踪时间(a)和探测角度、探测距离

图14 雷达组网对不同高度飞行器的探测范围

表2 雷达组网内各单部雷达对不同高度飞行器的探测距离
根据计算结果,可绘制不同高度的雷达包络图,并通过STK 视窗显示,如图14 所示。图中包络由内到外依次为飞行高度100 m、500 m、1 000 m、2 000 m、5 000 m、7 500 m、10 000 m 时雷达组网的探测范围。由此可见,雷达组网对不同高度的飞行器的探测范围随探测高度的增加而增加。
4 结论
本文主要研究了目标保障工作中的STK 建模与仿真方法。基于STK 强大的模拟与显示能力,重点介绍了战场环境中对陆地环境地形地貌因素的建模过程,同时基于STK 强大的细节展示与分析计算能力,重点介绍了战场实体目标物理类模型和功能类模型的构建过程,通过将不同类型的目标进行功能和任务的组合叠加,实现了在不同约束条件下对目标系统作战能力的评估与分析,这为目标保障提供了重要的支撑依据。随着STK 在国内应用领域的拓宽,关于STK 在陆、海、空、天、电一体化任务的仿真手段也将会得到进一步提高。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:34
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
小哥白尼(军事科学)(2021年10期)2021-02-12 03:07:16
意林(2020年20期)2020-11-06 04:06:14
中国外汇(2019年18期)2019-11-25 01:41:54
电子制作(2018年2期)2018-04-18 07:13:25
哲学评论(2017年1期)2017-07-31 18:04:00
领导决策信息(2017年9期)2017-05-04 04:04:49
领导决策信息(2017年9期)2017-05-04 04:04:49
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12