
北极野外监测装置光伏发电系统控制策略研究
2021-05-04 02:02李聪克窦银科左广宇
电源技术 2021年4期
陈 睿,陈 燕,李聪克,窦银科,左广宇
(太原理工大学电气与动力工程学院,山西 太原 030024)
北极地区位于地球最北端,年平均气温为-15~-20 ℃,目前北极考察主要有船基考察和自动监测装置考察等方式。其中,自动监测装置包括北极海-冰-气无人冰站观测系统、天文观测器和冰形变探测器等,这些装置安装于北极冰层上,终年随着海流漂移,其供电主要依靠电池技术,但长期低温环境对电池寿命损耗极大,且在海冰移动过程中电池更换的不方便性和不及时性给北极持续科考造成很大影响[1],利用可持续能源供电势在必行。
目前的极区科考设备已由单一的蓄电池供电转向可再生能源和蓄电池联合供电[2],但其供电设备大多用在极区陆地地区,如南极中山站,其设备体积庞大,可用于与柴油机联合供电,对可再生能源的依赖程度相对较小,对系统控制精度、速度以及能量利用率要求相对较低,不适合应用于随海冰漂移的野外监测装置。同时,光能作为北极供电系统的重要能源,其发电系统的控制尤为重要,然而光伏输出功率会随着光照强度、温度等气候条件不断变化,直接引起直流母线电压的波动甚至突变[3],对系统运行的稳定性影响很大。
针对上述问题,本文提出了一种用于北极野外监测装置供电的风光海流供电系统中的光伏发电系统的能量管理控制策略,即最大功率跟踪和恒压控制。其中,光伏、风力和海流发电系统经各自变换器接入直流母线。该控制策略解决了非极区光伏供电系统中的最大功率跟踪的跟踪速度慢,稳态波动大的问题,有效提高了跟踪速度和精度,且避免了光照输入突然增加时直流电压的波动和蓄电池频繁充放电引起的寿命缩短等问题,能够快速高效地利用光能,稳定直流母线电压,保证北极野外监测装置的供电可靠性。
1 光伏发电系统
光伏发电系统主要由光伏电池和DC/DC 控制器构成,光伏电池将随温度、光照强度等气候条件变化的光能转化为直流电,通过DC/DC 控制器接入直流母线。DC/DC 控制器通常为Buck 变换器或Boost 变换器,为使光照强度低时仍有能量流动且减少能量损耗,本文使用Boost 变换器[4]。光伏发电系统结构图如图1 所示,光伏电池经Boost 变换器接入直流母线,控制策略通过控制Boost 电路中电子器件的导通或者关断的时间实现。

图1 光伏发电系统结构图
1.1 光伏电池模型
根据光伏电池的等效电路可得出其数学模型,但由于温度以及太阳辐射的变化会对输出电流造成影响,因此在模型基础上加以修正[5]:

式中:ISC为光伏电池短路电流;UOC为光伏电池开路电压;α 为电流变化温度系数,取0.005 4 A/℃;β 为电压变化温度系数,取0.02 V/℃;Rs为光伏电池中的等效串联电阻,取0.1 Ω;Sref和θref分别为参考条件下光照强度和环境温度,一般取1 kW/m2和25 ℃。
根据式(1)~(4)得出光伏电池的Simulink 模型如图2 所示。

图2 光伏电池模型
光伏发电系统的控制策略与其输出特性曲线有重要的联系。光伏电池的输出主要受温度和光照强度影响[6],其光伏输出特性曲线如图3 所示,图3(a)为参考温度25 ℃下,光照强度分别为1.2、1、0.8、和0.6 kW/m2时的P-V曲线图,图3(b)为光照强度1 kW/m2下,温度分别为-30、-20、-10、0 和10 ℃时光伏电池的P-V曲线。由图3 可知,总存在某一点电压使得光伏输出功率达到最大,且光伏输出功率受光照强度影响远大于温度的影响,因此后续实验只涉及光照强度变化时的仿真验证。

图3 光伏输出特性曲线
1.2 DC/DC 控制器与控制策略
若不考虑储能系统,则引起直流母线电压变化的根本原因就是光伏阵列发出功率与直流负荷功率不平衡。若光伏阵列发出的功率大于负载功率,则直流母线电压上升;若光伏阵列发出的功率小于负载功率,则直流母线电压下降。
光伏发电系统的控制策略是由控制DC/DC 变换器中的绝缘栅双极型晶体管(IGBT)的导通和关断实现的。当光照强度较低时,光伏电池输出功率小于负载功率,为避免能源浪费和蓄电池频繁充放电,需要控制DC/DC 变换器使光伏发电系统输出最大功率,采用最大功率跟踪的控制策略;当光照强度较高时,光伏电池输出功率超过负载功率,且蓄电池不需要充电时,必须控制DC/DC 变换器使光伏输出功率降低,保持直流母线电压的恒定,保证供电系统的安全可靠运行,即恒压控制策略。两种控制策略的区别最终体现在IGBT 的导通和关断时间以及频率的不同。控制策略切换基于母线电压大小。
2 改进的自适应最大功率跟踪控制
2.1 自适应最大功率跟踪分析与建模
常用的最大功率点跟踪(MPPT)控制方法有固定电压法、电导增量法、扰动观察法等。其中扰动观察法参数较少、原理简单、易于实现、应用更加广泛[7],其原理为通过检测实际的光伏输出电压并不断添加扰动量,使光伏输出电压为输出特性中的最大功率点处的电压,此时输出功率达到最大功率。但传统的定步长扰动观察法存在步长问题,不能动态地改变步长,如果步长设置较小,到达稳态时精度相对较好,但系统跟踪速度慢;如果步长设置较大,容易造成在最大功率点处震荡的问题[8]。目前大部分研究中的变步长扰动观察法只单单停留于分段定步长的阶段,上述问题依然存在,只适合应用在光能相对充足、精度要求低的场合。
北极拥有特殊的极昼极夜现象,光能相对不够稳定,对控制器要求较高,因此,本文提出一种改进的自适应扰动观察法。该方法根据光伏输出特性曲线在最大功率点左右两部分斜率的不同,将扰动量设为斜率的函数,且随着每一点斜率的变化而变化,步长在每一点处均不同,其扰动原理为:

式中:Un为第n次电压采样值;Un+1为第n+1 次电压采样值。
由图3 可知,光伏输出特性曲线在最大功率点处斜率为0,越靠近最大功率点处的斜率绝对值越减小,扰动步长需要相应地减少以避免在最大功率点处的震荡;在远离最大功率点时,需要相应地增大其扰动步长来达到快速跟踪,因此该自适应扰动观察法的扰动量是关于ΔP/ΔU的函数;且在最大功率点左侧时,扰动量应为正;在最大功率点右侧时,扰动量应为负。图4 为改进的自适应扰动观察法流程框图。

图4 改进的自适应扰动观察法流程框图
首先采集n时刻的光伏输出电压Un和电流In,计算前后时刻的电压差ΔU和功率差ΔP,通过判断ΔP/ΔU的正负得到扰动量ΔUn和n+1 时刻的电压参考值Un+1,将此时电压的实际值U与参考值Un+1的差值ΔU*送入PI 控制器得到调制信号,经过脉冲宽度调制(PWM)得到Boost 电路控制信号的占空比。其中,α 和β 均为步长因子,本文分别取0.178 和0.6。在Matlab/Simulink 中建立改进的自适应最大功率跟踪的模型,如图5 所示。
2.2 仿真验证
光伏系统仿真模型如图6 所示,其中MPPT 模块为图5 的封装形式,为改进的最大功率跟踪模型,模型输入信号为Ipv和Upv,分别代表光伏电池的输出电流和输出电压,通过上述的最大功率跟踪模型计算和PWM 调制,最终输出信号g,作为IGBT 控制信号,用于控制Boost 电路的通断,从而改变光伏电池输出功率和电压。其电路中的具体参数如表1 所示。
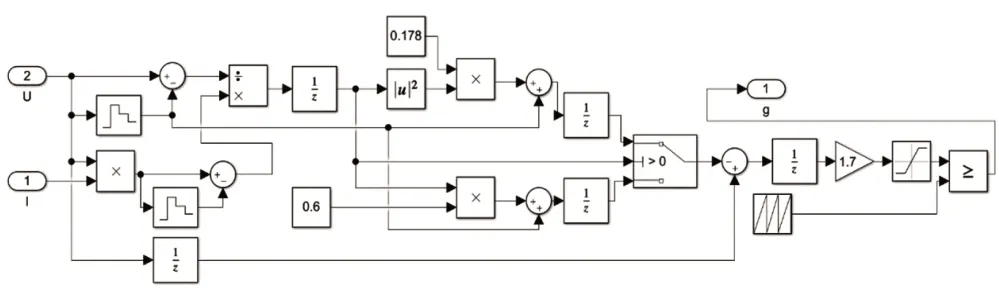
图5 改进的自适应扰动观察法模型

图6 光伏系统仿真模型

表1 电气参数表
为了验证控制策略的可行性,在Matlab/Simulink 环境下进行仿真。为了模拟北极低温环境,设置温度为-20 ℃,仿真时间为0.9 s,仿真步长采用离散步长,取样时间为1 ms,求解器采用的是变步长的ode23tbc(stiff/TR-BDF2)。
保持环境温度-20 ℃不变,光照强度在0.03 s 时由1 000 W/m2降为800 W/m2,0.06 s 时光照强度又降到600 W/m2,如图7(a)所示,光伏输出功率变化曲线如图7(b)所示,系统在0.001 377 s 时跟踪到了最大功率点且跟踪性能稳定,功率为140.5 W;当光伏突变时,光伏发电系统也能很快地跟踪到最大功率,且稳定精度高,功率几乎无波动,充分验证了改进的最大功率跟踪控制策略具有跟踪速度快、稳定性好和能量利用率高的特点。

图7 最大功率跟踪仿真波形图
3 恒压控制
3.1 恒压控制分析与建模
一般情况下,尽量使得光伏发电系统工作在最大功率追踪状态。当光伏输出功率大于负载功率,且储能元件达到满充而不工作时,系统能量过剩会引起直流母线电压上升,为了确保光伏发电系统安全运行,就必须对光伏系统采取降功率控制[9]。本文采用恒压控制,即通过改变光伏输出电压的大小控制其输出功率的大小。其控制策略模型如图8 所示。将实际测得的直流母线电压Udc与直流母线电压参考值阈值1.1U*dc=33 V 进行比较,差值送入电压PI 控制器,得到电感电流的参考值I*L,将其与电感电流实际值IL比较后送入电流PI调节器得到调制波,以三角波作为载波,经过PWM 调制得到Boost 电路的控制信号[10]。

图8 恒压控制策略模型
3.2 仿真验证
为了验证光伏恒压控制策略的有效性,在Matlab/Simulink环境下进行仿真。仿真结果如图9 所示,保持环境温度-20 ℃不变,在0.01 s 时,光照强度由500 W/m2升到1 000 W/m2,此时光伏输出冗余,系统由最大功率跟踪模式转变为恒压模式,此时光伏输出电流Ipv减小,光伏输出电压Upv增大,根据光伏输出特性曲线可知,其位于最大功率点右侧,光伏输出功率减小,并且直流母线电压经过0.001 s后稳定于33 V 左右,验证了恒压控制策略的有效性。其中电压PI调节器的参数为P1=0.2,I1=0.01;电流PI调节器的参数为P2=8,I2=20。
4 结论
本文结合极地低温环境,提出了一种用于北极野外监测装置风光海流供电系统中光伏发电系统的控制策略。采用改进的自适应扰动观察法实现了最大功率跟踪控制,其跟踪速度快,稳态精度高,大幅提高了光能的利用率;采用电压电流PI 调节控制实现了恒压控制策略,有效避免了蓄电池频繁充放电,保证了直流母线电压的恒定。通过仿真验证了该控制策略的有效性和可行性。

图9 恒压控制仿真波形图
猜你喜欢
装备制造技术(2021年2期)2021-07-21
通信电源技术(2016年5期)2016-03-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年11期)2015-04-09
电测与仪表(2015年5期)2015-04-09
燕山大学学报(2014年2期)2014-03-11
河南科技(2014年11期)2014-02-27
河南科技(2014年3期)2014-02-27
电机与控制应用(2013年9期)2013-11-21
