考虑定位特征的公差规范本体化研究
2021-04-30 08:26江佳炜黄美发赵宇飞
机械设计与制造 2021年4期
江佳炜,黄美发,2,赵宇飞,黄 劲
(1.桂林电子科技大学机电工程学院,广西 桂林 541004;2.广西制造系统与先进制造技术重点实验室,广西 桂林 541004)
1 引言
新一代GPS(Geometrical Product Specifications)“产品几何技术规范”体系中,将公差规范作为公差设计中的重要环节,其设计的好坏会直接影响到产品质量。
文献[1]从几何方面研讨了公差类型的生成;文献[2]探讨了基于变动几何约束网络的公差规范设计;文献[3]利用定位表来进行公差规范设计;文献[4]利用改进的装配有向图研究了功能公差规范设计;文献[5]依据拓扑相连表面模型进行公差规范自动生成;文献[6]分析了公差信息的工程语义,提出层次式公差模型;在此基础上,文献[7]构建了基于空间关系层的公差类型生成方法。
主流的公差规范设计是设计者直接在CAD 系统中采用符号标注。一方面,现有的公差规范设计很少考虑装配定位连接(Assembly Position Joint,APJ)间的关联性,可能导致零件无法顺利安装。另一方面,对于复杂产品的设计,往往依据专家知识和经验,这会加大公差规范设计的不确定性。
针对上述问题,利用本体来显式地表示公差规范信息的语义。首先,依据公差规范自动生成的需求,构建公差规范表示模型;其次,基于所建模型,以本体规则的形式显示地构建公差规范信息本体;然后,基于装配体定位连接优先级与公差规范的内在推理机制,实现公差规范设计;最后,通过实例验证方法的有效性。
2 公差规范表示模型
公差规范表示模型用于描述公差规范自动生成所需要的零件层、装配特征面层、定位连接信息层和公差规范层构成,层次结构,如图1 所示。图中:Assembly—装配体;Partn—零件n;AFSn,k—零件Partn的第k个装配特征面;Jointu—装配特征面形成的装配定位连接;TS—公差规范信息(包括公差类型、公差原则和基准参考等信息)。
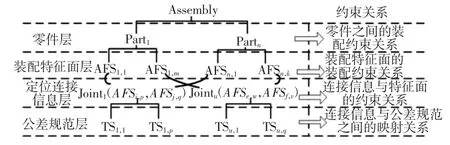
图1 公差规范表示模型Fig.1 The Information Model of Tolerance Specification
2.1 零件层
装配体是由零件根据装配约束关系组合而成。零件层是公差规范表示模型的第一层,主要用于提取零件间的装配约束关系,为之后的三层模型构建奠定基础。如上所述,零件层中各零件的装配约束关系的定义如下:
定义1.设给定的装配体为A={P1,P2,…,Pn},其中P1,P2,…Pn是构成装配体A的n个零件。设零件之间存在配合约束关系为MAT={(Pi,Pj),…,(Pm,Pn)},其中(Pi,Pj)表示零件Pi和Pj存在配合约束关系,是构成配合关系集合中的一个元素。若P1在P2上装配,则称P1为上位零件,P2为基础件。
装配体为A={P1,P2},其中P1,P2存在配合约束关系:MAT={(P1,P2)},零件P1在P2上安装,所以P1是上位零件,P2为基础件,如图2 所示。
2.2 装配特征面层
装配体中的零件可看做是由多个特征表面组合而成的闭合几何体。装配特征表面层是模型的第二层,其主要作用是提取零件的装配特征表面信息。与其它零件的特征面有装配约束关系的特征面称为装配特征面,因此把零件之间的约束进一步转化成装配特征面之间的约束。
装配特征面层为之后两层奠定了基础,主要包含装配特征面的几何要素信息和基本配合约束与自由度之间的关系。
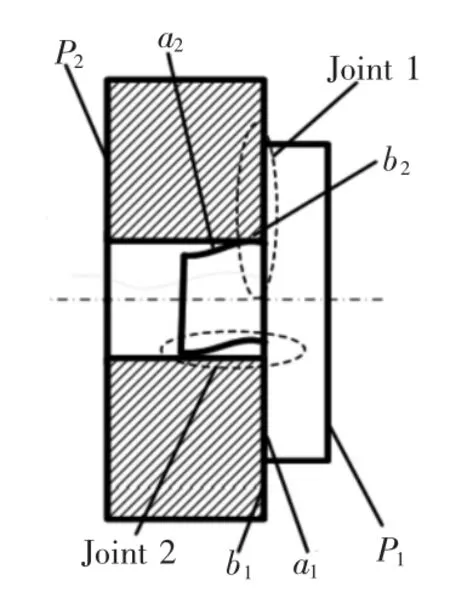
图2 大平面与短轴Fig.2 Large Plane and Short Axis
2.2.1 装配特征面的几何要素信息
新一代GPS 关于理想表面划分为7 个恒定类。文献[3-4]在此基础上研究了工程中较为常见的装配特征面类型。特征识别可以完成实体模型几何参数的获取,为CAD,CAM 的一体化提供了一种卓有成效的方法[8]。
从三维软件的装配特征识别技术出发,将装配特征面划分为以下两种形式:单一特征面和复合特征面,并研究了常见的特征面。常见单一特征面类型及其几何要素信息,如表1 所示。三维软件中可以利用几何拓扑直接识别获取单一特征面[9]。在特征识别之后,便可以从中提取装配特征面的几何要素,不同的定位特征需要的几何要素是不一样的,如平面需要提取面的外法矢u和平面上的一点P,而球面需要提取球心点P和半径r。
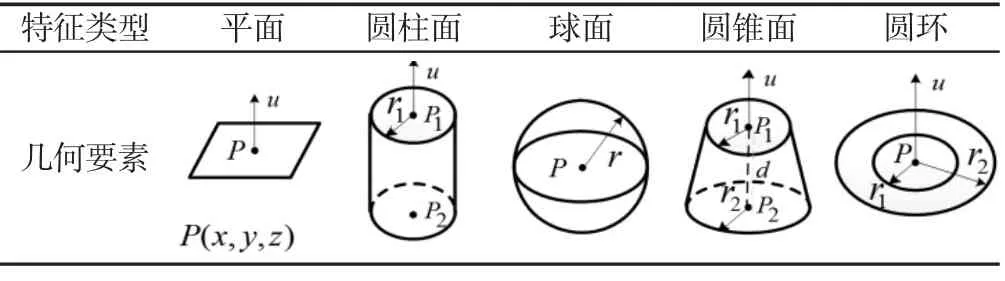
表1 常见单一特征面类型及其几何要素信息Tab.1 The General Single Feature Surface Types and Their Geometric Elements Information
根据表1,可以对单一特征面类型与其几何要素信息的关系定义如下:
定义2.设单一特征面的集合为ASF={PL,CY,SP,CO,RI},其中PL为平面,CY为圆柱面,SP为球面,CO为圆锥面,RI为圆环。几何要素信息集合为AGF={P,u,r,d},P为平面上的一点,u为外法矢,r为半径,则单一特征面类型与其几何要素信息的关系是一个从ASF到AGF的映射fGF:ASF→AGF。
复合特征面由多个单一特征面组合而成,它的几何要素可以根据已经提取的单一特征几何要素之间的关系(约束、重合、分离、包含、平行、垂直、斜交和异面)进行提取。常见复合特征面类型及其识别条件,如表2 所示。
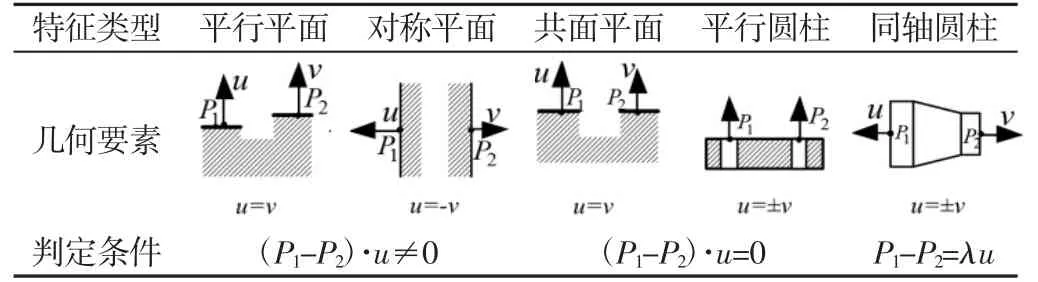
表2 常见复合特征面类型及其识别条件Tab.2 The General Compound Feature Types and Their Identification Conditions
根据表2,可以对常见复合特征类型及其判定条件的关系定义如下:
定义3.常见复合特征类型的判定条件集合ADC={u=v,u=-v,u=±v,(P1-P2)·u=0,(P1-P2)·u≠0,P1-P2=λu},常见复合特征的类型集合TCF={PP,SPP,CP,PC,CC},其中PP为平行平面,SPP为对称平面,CP为共面平面,PC为平行圆柱,CC为同轴圆柱。故复合特征的类型是ADC到TCF的映射fCT:ADC→TCF。
零件P1存在装配特征面a1和a2,P2存在装配特征面b1和b2,其中根据定义2 和定义3 可得特征面类型:a1为PL,a2为CY,b1为PL,b2为CY,如图2 所示。
2.2.2 基本配合约束与自由度之间的关系
通过局部坐标将特征面间的约束简化为配合面间XOY面上的配合M1、XOZ面上的配合M2,YOZ面上的配合M3,X轴上的配合M4,Y轴上的配合M5和Z轴上的配合M6,加上紧配合M7,一共7 种。
相互约束的特征表面在空间上约束自由度的情况,如表3所示。其中DOF 为自由度信息;DOF1 为沿X轴的约束;DOF2为沿Y轴的约束;DOF3 为沿Z轴的约束;DOF4 为绕X轴的约束;DOF5 为绕Y轴的约束;DOF6 为绕Z轴的约束;1 为有约束;0 为无约束。
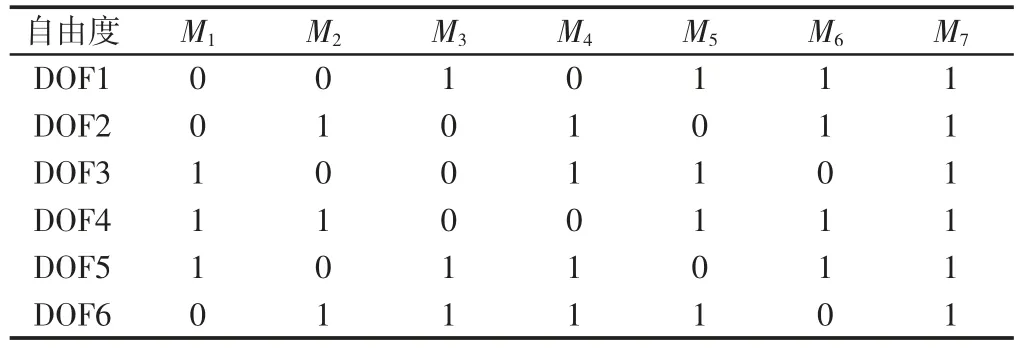
表3 特征面基本配合约束与自由度之间的关系Tab.3 The Relationship Between the Basic Fit Constraintand the Degree of Freedom of the Feature Surface
根据表3,对特征面基本配合约束与自由度之间的关系作如下定义:
定义4. 设装配特征面间的基本配合约束集合ABM={M1,M2,M3,M4,M5,M6,M7},自由度信息集合ADOF={DOF1,DOF2,DOF3,DOF4,DOF5,DOF6},装配特征面间的配合约束与自由度之间的关系是一个从ABM到ADOF的映射fMR:ABM→ADOF。
定义5.设作用于ABM上的n个约束构成一个约束集合C,由此可推导出该被装配体的旋转自由度集合为T,移动自由度为R,如果对于该约束集的任何真子集都不能推导出T和R,则称C为独立约束集(IC),C中的约束均称为独立约束。
a1和b1为平面与平面的约束,通过局部坐标系的调整,可得装配特征面a1和b1存在YOZ面上的配合M3,根据表3 可知其约束了自由度DOF1、DOF5 和DOF6,如图2 所示;装配特征面a2和b2存在绕Y轴的转动DOF5,根据表3 获取其约束自由度DOF1,DOF3,DOF4 和DOF6。根据定义5 可知,a2和b2的配合的独立约束为DOF3,DOF4。
2.3 定位连接信息层
APJ信息层是公差规范表示模型的第三层。通过对特征面的自由度信息提取获得定位优先级,为公差规范的生成奠定坚实的基础。APJ是指存在约束的两个装配零件上的特征表面构成的装配连接接点。APJ连接优先级次序通过其限制自由度多少类决定,按照限制自由度越多,则越优先的原则可将APJ分为主连接(Primary_Joint)、次连接(Secondary_Joint)和第三连接(Tertiary_Joint)。
零件PartA 的装配特征面为a1和a2,零件PartB 装配特征面为b1和b2,如图2 所示。其中a1和b1构成了装配连接Joint1,a2和b2构成了装配连接Joint2。由2.2 节可知Joint1 限制了3 个自由度,Joint2 限制了2 个自由度,所以Joint1 是主连接,Joint2 为次连接。
定义6.设给定的定位连接集合为AJ={ABM,ADOF},连接次序集合为AOJ={Primary_Joint,Secondary_Joint,Tertiary_Joint},则连接信息是一个从AJ到AOJ的映射fJ:AJ→AOJ。
表4 给出了APJ常见特征面,其中每个类型对应一个标记,FT={F01,F02···Fn}。
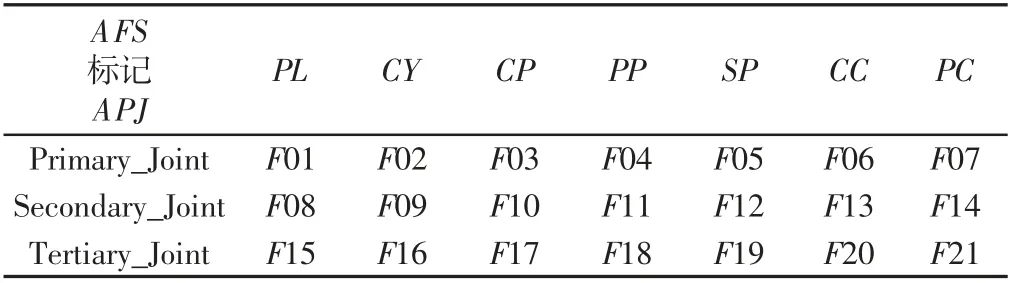
表4 APJ 常见特征面Tab.4 The General Feature Surface of APJ
2.4 公差规范层
公差规范层的主要作用是根据特征面提取的几何要素信息和APJ信息来获取零件的公差规范,包括公差规范的初步设计、公差规范的优化、基准参考框架的选择及公差原则的使用。
2.4.1 公差规范的初步设计
为了便于计算机的执行与存储,基于公差规范表[3]给出了常见定位连接与公差规范形式的映射关系矩阵表,如表5 所示。该表以FT所对应的特征面为行,以公差规范类型为列。
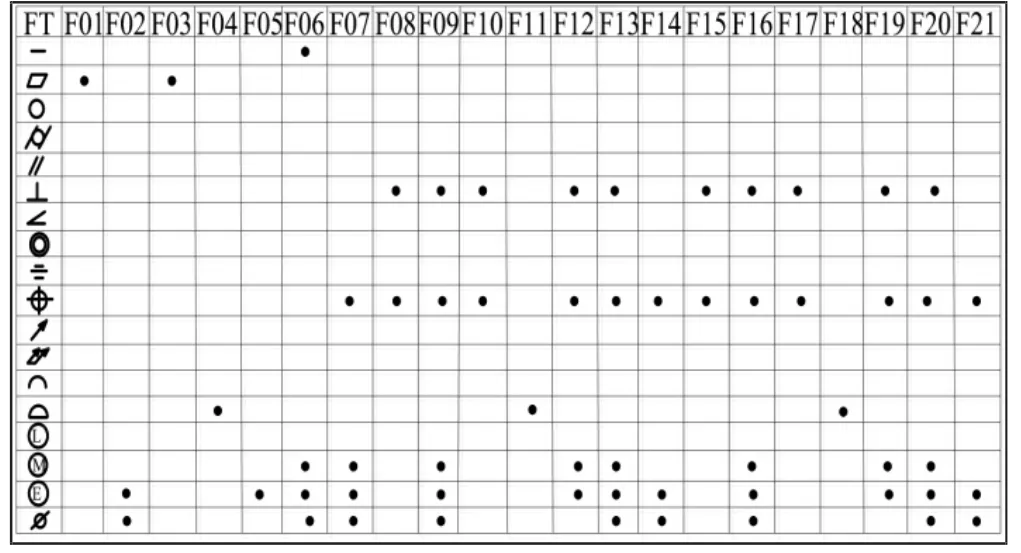
表5 常见定位连接与公差规范形式的映射Tab.5 The General Mapping of Positioning Connection and Tolerance Specification
2.4.2 公差规范的优化
针对表5 中同一个FT对应多个公差类型的情况,根据特征规范表面的几何要素信息和参考基准之间的几何要素信息关系,选取相应的公差信息以及圆形或圆柱形公差带 的选取,如表6所示。其中PL为平面,CY为圆柱面,PR为棱柱面,PE为旋转面,其余标记见2.2.1。
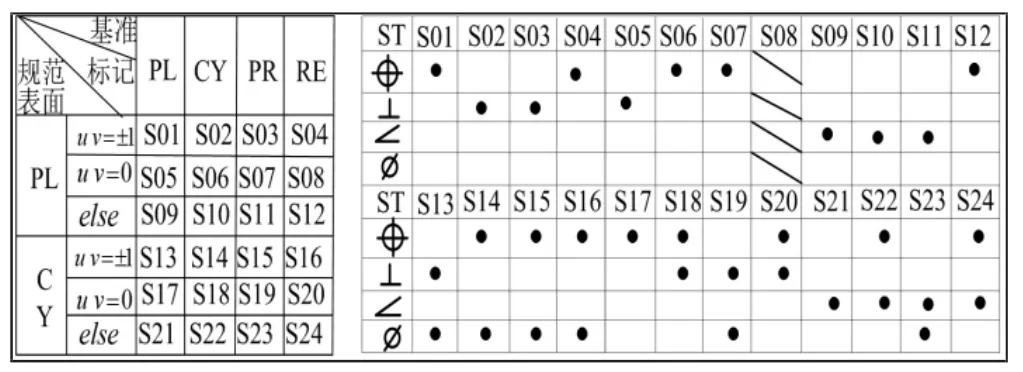
表6 常见规范表面的标记及其公差规范优化表Tab.6 The Mark of General Specification Surface andTheir Tolerance Specification Optimization Table
2.4.3 基准参考框架DRF 的选择
分界面是零件装配中影响几何精度的连接集合,因此将分界面处的装配特征面为参考面,对其他表面进行精度控制。
定义7.主定位特征主要规范尺寸和形状公差;次定位特征以主定位特征为参考,对位置公差进行规范;第三定位特征以主、次定位特征为参考,对定位公差进行规范。上位零件的AFS的最小参考基准(MGRE)构成主DRF,下位零件的AFS构成DRF[4]。只有当主DRF(Main_DRF)不充分的时候才使用辅助DRF(Auxiliary_DRF),基准参考框架的验证,如图3 所示。基准要素的优先次序很大程度上去决定于其所属的装配定位连接的优先级次序,在进行基准标注时使用A,B,C这样的大写字母依次替换。上位零件P1的主DRF由a1,a2构成,因为a1面所在的Joint1 为主连接,故a2面为主基准,a2为第二基准,如图2 所示。
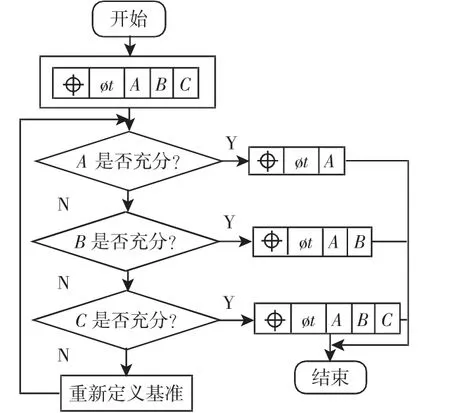
图3 基准参考框架的验证Fig.3 The Validation of the Reference Frame
2.4.4 公差原则的选择
定义8.公差原则有相关原则(最大实体要求、最小实体要求和包容要求)和独立原则。为了满足零件之间的装配,通常使用最大实体要求;为了满足几何精度和强度要求,通常使用最小实体要求;为了满足配合特征的定位面上规范尺寸公差,可使用包容条件[4、10]。
3 公差规范信息本体
利用本体在概念化模型的语义表示和智能推理等方面特点和优势,将本体引入零件公差规范研究中。可以在一个软件环境中建立公差规范的语义和约束信息。当需要对公差规范进行检查时,立即切换到Protégé 的个体中,能直观看到其对应的属性,从而完全利用Protégé 软件所提供的公差规范的内部表达与存储方式,这样使得公差规范的建立和检查都在同一个环境中进行,保证了一致性。
3.1 公差规范信息本体的构建

图4 公差规范表示的元本体的类Fig.4 Class of Meta-Ontology Represented of Tolerance Specification
为了便于本体的构建,引用Stanford 大学提出的七步法,步骤如下:
(1)确定应用领域。构建公差规范的本体,有助于公差规范项目的自动推理,属于公差设计领域。
(2)重用现有本体。目前,在公差设计领域有一些公差规范本体可供参考,但没有可以重用的本体。
(3)列出重要术语。根据公差规范的研究,可列出零部件、特征表面信息、定位连接信息、公差类型、基准参考等。
(4)定义层次关系。将公差规范信息表示模型描述中的一元关系定义为类,类与类之间的层次关系,如图4 所示。
(5)属性定义。表示二元关系的术语可定义为属性,如图5所示。
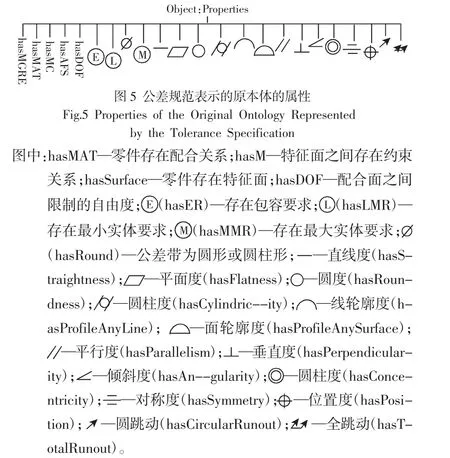
(6)属性限制。根据公差规范的需求,对属性的定义域和值域进行限制:hasMAT、hasM 定义域为装配特征面,值域为配合关系;hasDOF 定义域为配合关系,值域为自由度;的定义域为几何要素外矢量方向,值域为公差值;E ,L 和M 定义域为连接特征面,值域为公差值;公差类型的定义域为连接优先级所对应的特征面类型,值域为公差类型。
(7)创建类的实例。按照实际的需求建立。
3.2 关系生成规则
本体支持推理,通过语义Web 规则语言(Semantic Web Rule Language,SWRL)建立推理规则,以加强本体的智能推理[11]。根据公差规范生成的需要,建立APJ优先级生成规则、公差类型的生成规则、基准生成规则。
3.2.1 定位连接优先级生成规则
定位连接优先级的目的是为了生成得到特征面的信息,从而为公差规范的奠定基础。通过特征面之间的配合类型判定其限制的自由度得到连接优先级关系。如上描述的规则如下:
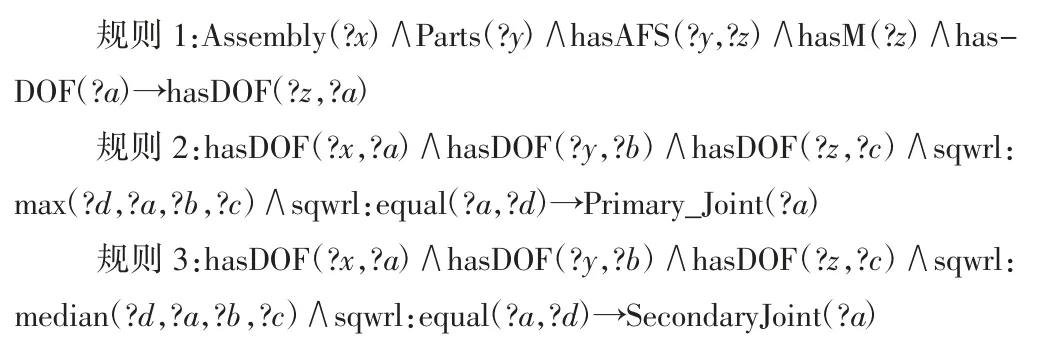

规则1 描述了零件装配特征面间存在的约束关系和限制的自由度信息,其中i∈[1,7]。断言Asf是所有特征面OWL断言的集合。规则2,3,4 描述的是APJ限制自由度数量对其优先级的映射关系,断言Ai是APJ定位优先级的所有OWL断言的集合。
3.2.2 公差类型的生成规则
通过对表5 中APJ优先级及其特征面类型与公差规范的映射信息进行规则的建立,得到初步规范:
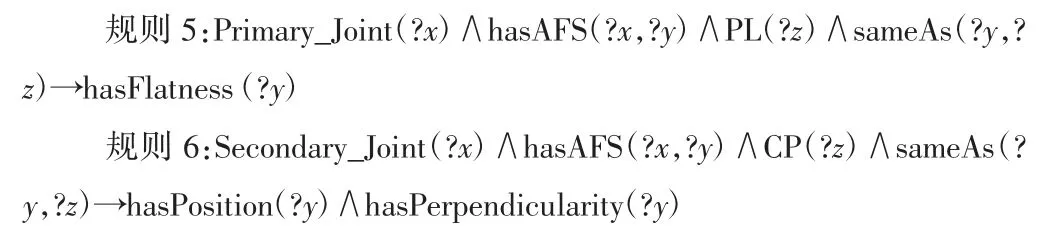
规则5 描述当主装配定位连接处的AFS为平面时,特征面处的公差类型为平面度;规则6 描述当次装配定位连接处的AFS为共面平面时,特征面处的公差类型为垂直度或者位置度,其它情况的规则可以根据表5 中的映射类似获得。断言Ats是所有APJ特征面具有的公差规范OWL断言的集合。
公差类型优化是为了减少公差类型的选择,得到更加确切的公差规范信息,使其更符合工程实际,根据表6 的映射关系进行规则描述如下:
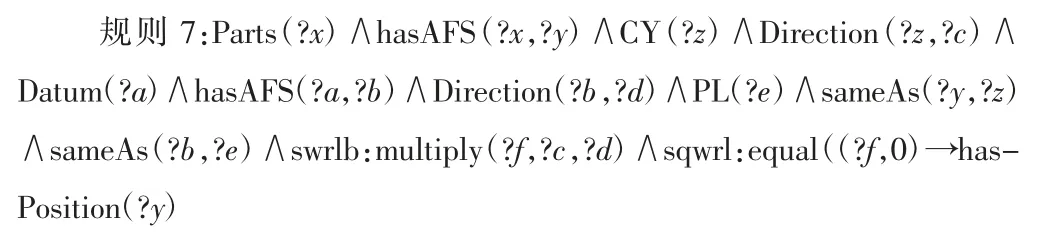
规则7 描述了规范表面的为圆柱面,基准特征为平面,且规范表面的外法矢的方向与基准的外法矢方向垂直时,规范表面的公差类型为位置度公差,此时公差带不加 。其它情况的规则可以根据表6 中的映射类似获得。断言Aop是所有规范表面进行公差规范优化的OWL断言集合。
3.2.3 基准生成规则
基于2.4.3 节基准的生成建立基准生成规则如下:
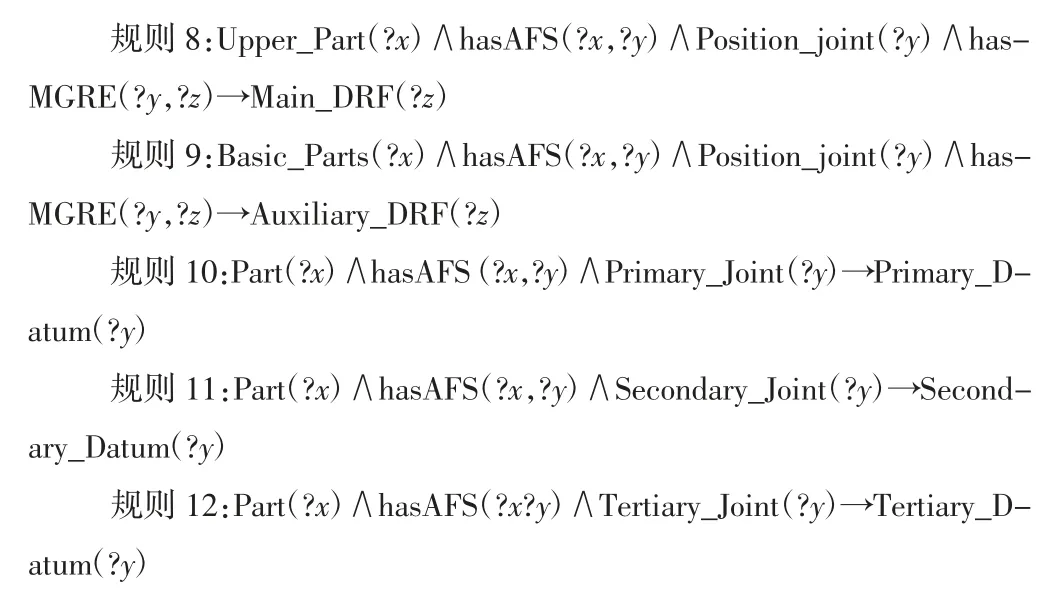
规则8,9 描述了主DRF和辅助DRF的生成,断言Adr是所有DRF建立的OWL断言的集合。规则10,11 和12 描述了零件在进行公差规范中基准次序的生成,断言Ado是所有基准次序生成的OWL断言的集合。
4 公差规范的自动生成
公差规范的生成需要规划出所有符合条件的合理方案。本节利用装配定位约束信息,并在此基础上输入相关规划要素和提取推理结果,最后筛选出符合条件的合理规范方案。基于定位特征的公差规范的自动生成过程,如图6 所示。
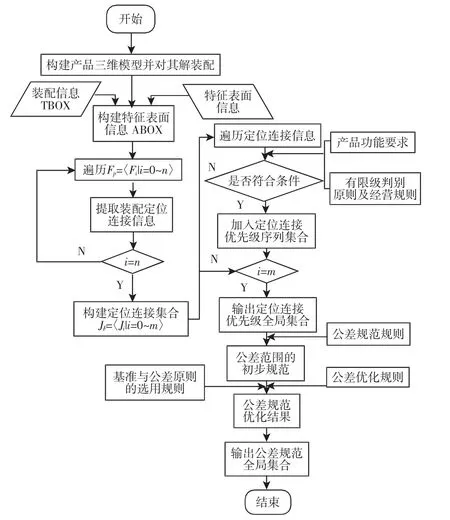
图6 公差规范自动生成流程图Fig.6 Tolerance Specification Automatic Generation Flow Chart
具体步骤如下:
步骤1:构建产品模型并对其解装配;根据产品的功能要求及各零件的理想尺寸,通过三维软件绘制产品的装配模型,并在三维软件中对产品进行解装配,将模型分解成若干个零件或者若干个零件组。
步骤2:遍历装配各个零件,构建其装配特征表面模型的断言集合Asf;根据各零件之间的拓扑关系,将三维产品中的各个零件或者若干个零件组进一步分解成2 个以上装配特征表面,通过LTG 算法[12]和AME[13]算法自动提取各零件的装配特征表面。
步骤3:提取装配定位连接断言集合Ai;把步骤2 取得的装配特征表面类型断言集合Asf作为输入,获得装配定位连接断言集合A0和特征面所有的配合约束断言集合A1。
步骤4:构建表示装配特征表面约束关系与自由度关系的断言公理集Adf;通过分析建立装配定位连接的优先级生成规则,将步骤3 中的约束关系断言集合A1作为输入,根据定义4 和定义5,执行规则(1~4)构建定位连接的优先级次序集合Apd。
步骤5:获取初步公差规范断言集合Ats;根据Ai和Apd,执行表5 中的映射规则,可获得壳体的初步公差规范断言集合Ats。
步骤6:获取公差类型的优化断言集合Aop;针对公差选择不明确的问题,执行对表6 映射关系进行描述的规则,根据特征规范表面的几何要素信息和参考基准之间的几何要素信息关系,选取相应的公差信息以及公差带符号 的选取,通过执行类似于规则7 的公差优化规则,得到断言公式集Aop。
步骤7:获取DRF断言集合Adr和基准优先次序断言Ado;执行规则(8~9),得到DRF的断言集合Adr,执行规则(10~12)得基准优先次序的断言集合Ado,并根据定义7 优化基准符号。
步骤8:选用公差原则;根据定义8 优化所需的公差原则。
步骤9:输出全局公差规范;生成壳体的公差规范,相关公差大小根据设计需求给出,在这不做讨论。
5 实例分析
此研究探讨的公差规范只涉及公差类型及相关修正符号的选用,并未讨论公差大小的确定方法,公差大小按常用精度选用。本节以图7(简化的电机装配模型)为例,探讨公差规范的自动生成。
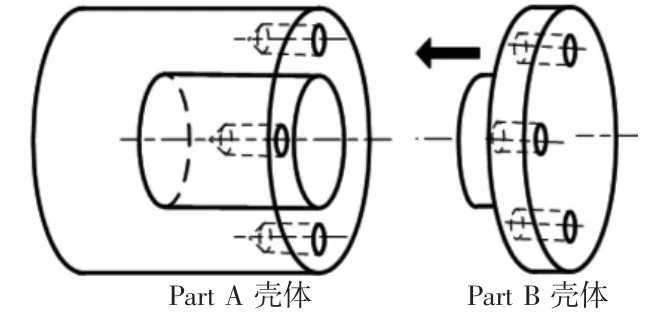
图7 电机简图Fig.7 The Schematic Motor Diagram
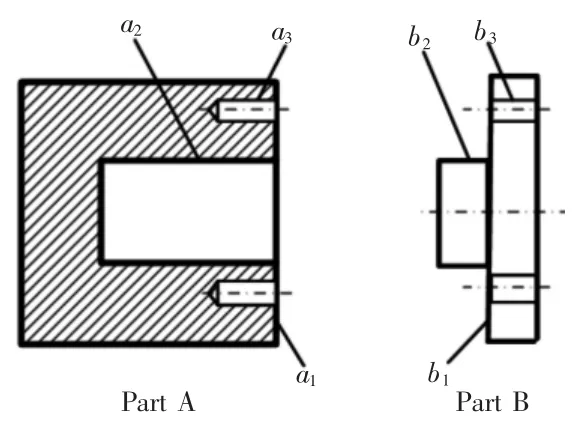
图8 电机AFS 信息Fig.8 Motor AFS Information
根据所提方法,电机壳体的公差规范生成步骤如下:
步骤1:构建产品模型并对其解装配;根据产品的功能要求及各零件的理想尺寸,通过三维软件绘制产品的装配模型,并将模型分解成零件PartA 和PartB。
步骤2:遍历装配各个零件,构建其装配特征表面模型的断言集合Asf;根据各零件之间的拓扑关系,提取各零件的装配特征表面。壳体零件PartA 和一个端盖零件PartB 的装配特征表面,如图8所示。由图可得PartA 的AFS 断言集合Asf1={PL(a1),CY(a1),PC(a3)},PartB 的AFS断言集合Asf2={PL(b1),CY(b1),PC(b3)}。其中a1(壳体端面),a2(壳体孔的圆柱面),a3(壳体上螺钉孔的圆柱面)是零件PartA 的装配特征面,b1(端盖端面),b2(端盖轴的圆柱面),b1(端盖轴上螺钉孔的圆柱面)是零件PartB 的装配特征面。
步骤3:提取装配定位连接断言集合Ai;把步骤2 取得的装配特征表面类型断言集合Asf作为输入,获得装配定位连接断言集合A0={joint1(a1,b1),joint2(a2,b2),joint3(a3,b3)},特征面所有配合约束断言集合A1={hasM6(joint1),hasM1(joint2),hasM7(joint3)}。
步骤4:输出装配连接优先级全局集合Apd;通过分析建立装配定位连接的优先级生成规则,将步骤3 中的约束关系断言集合A1作为输入,根据定义4 和定义5,执行规则(1~4)构建定位连接的优先级次序集合Apd={Primary_Joint(joint1),Secondary_Joint(joint2),Tertiary_Joint(joint3)}。
步骤5:获取初步公差规范断言集合Ats。根据Ai和Apd,得到a1为主定位特征面,结合特征表面类型的断言集合Asf可得到a1特征面类型标记为F01,执行规则5,便得到公差规范类型断言HasFlatness(a1)。同理,执行表5 中的映射规则,可获得壳体的初步公差规范断言集合Ats={HasFlatness(a1),hasPerpendicularity(a2),hasPosition(a2),hasRound(t1),hasER(t1),hasMMR(t2),has-Position(a3)}。
步骤6:获取公差类型的优化断言集合Aop;针对公差选择不明确的问题,执行对表6 映射关系进行描述的规则,根据特征规范表面的几何要素信息和参考基准之间的几何要素信息关系,选取相应的公差信息以及公差带符号 的选取,通过执行类似于规则7 的公差优化规则,得到断言公式集Aop={HasFlatness(a1),hasRound(t1),hasPerpendicularity(a2),has-ER(t1),hasMMR(t2),hasPosition(a3)}。
步骤7:获取DRF 断言集合Adr和基准优先次序断言Ado;执行规则(8~9),得到DRF 的断言集合Adr={Main_DRF(a1,a2),Auxiliary_DRF(b1,b2,b3)}。执行规则(10~12)得基准优先次序的断言 集 合Ado={Primary_Datum(A),Secondary_Datum(B),Tertiary_Datum(C)},根据定义7 可知,A,B和C分别代表平面a1,壳体孔的圆柱面a2的中心轴线,壳体上螺钉孔的圆柱面a3的中心轴线。
步骤8:选用公差原则;根据定义8 优化所需的公差原则。
步骤9:输出全局公差规范;由步骤(1~7)生成壳体的公差规范,相关公差大小根据设计需求给出,这里不做讨论,壳体的规范结果,如图9 所示。
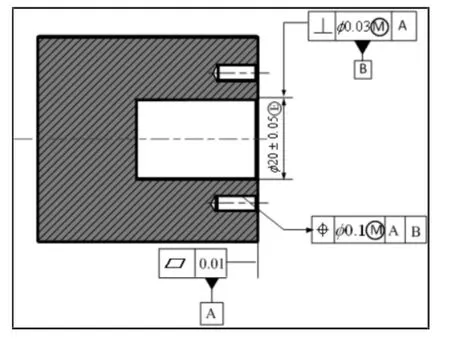
图9 壳体公差规范结果图Fig.9 Shell Tolerance Specification Result Diagram
6 结论
从装配特征连接的优先级出发进行公差规范设计,构建了公差规范本体,定义了装配连接优先级、公差类型、基准参考和公差原则的生成规则,实现了简单零件公差规范的自动生成。与依赖设计人员经验和技术的传统方法比较,减少了不合理的方案,适合计算机执行与存储。此研究主要涉及的是平面、圆柱面等简单表面的公差规范设计,下一步将展开对复杂面的研究。
猜你喜欢
华中师范大学学报(自然科学版)(2022年5期)2022-10-20
广西师范大学学报(自然科学版)(2022年4期)2022-08-08
疯狂英语·新读写(2019年5期)2019-05-15
综合智慧能源(2017年10期)2017-01-18
公民与法治(2016年19期)2016-05-17
综合智慧能源(2016年1期)2016-02-03
中国计量大学学报(2015年4期)2015-06-01
读者·校园版(2015年7期)2015-05-14
河南科技(2014年15期)2014-02-27
电子设计工程(2014年6期)2014-02-27