
深空探测器多结太阳电池电性能量化评测方法
2021-04-28 08:41王超朱立颖蔡晓东杜青
航天器工程 2021年2期
王超 朱立颖 蔡晓东 杜青
(北京空间飞行器总体设计部,北京 100094)
太阳电池阵产品作为深空探测器主要的能源供给,要具备大功率面密度和高功率质量比的特点,为了评价其能否满足能源供给需求,需要有效的手段进行测试验证。因此,太阳电池产品量化评测工作对于深空探测器的优化设计起着至关重要的作用。
太阳电池的标准测试是以标准太阳光为基准、模拟太阳光源作为测量基准进行的精确测试。航天用单结太阳电池可以通过AM0标准光照条件下太阳模拟器标定测试,获得较为准确的模拟空间环境单体太阳数据,主要包括短路电流与伏-安数据,这为设计航天用太阳电池板提供了一定的参考数据[1-5]。多结太阳电池测试时则具有较大误差,因为不同材料对太阳光谱响应,与标准AM0光谱相比,普通的太阳模拟器误差大,因而不能达到测试要求。目前,对多结太阳电池测试和标定存在以下问题[6-10]。
(1)太阳模拟器合成光谱分布与AM0标准光照条件的一致性难以保证,现有的技术水平难以高度拟合与传递AM0标准辐照条件的光谱分布。
(2)太阳模拟器的脉冲光源均匀性、稳定性难以同时保证,尤其是地面模拟光源的稳定性极差,很难在2次测试中保持完全相同的辐照参数。
(3)标准子电池与被测电池在测试光照条件下的失配度无法保证,各种三结砷化镓太阳电池所使用的基片及材料并不相同,不能统一为一类电池,更不能使用统一的标准电池进行地面测试光源的标定。
本文针对深空探测器太阳电池阵选定工作点电流的关键指标开展专项评测,利用标准电池和参考电池建立脉冲光源标准光源,可有效解决太阳模拟器合成光谱分布与AM0标准光照条件的一致性问题,脉冲光源均匀性和稳定性兼容性问题,以及电池失配修正问题。测试得到不同评测对象的选定工作点电流关键指标的地面测试数据,通过与修正后的在轨飞行数据进行比对,证明了评测方法的准确性和有效性。
1 多结太阳电池电性能量化评测方法
深空探测器多结太阳电池电性能量化评测方法的总体思路为:利用标准电池和参考电池,通过分结标定子电池、光源不稳定度测试与不均匀度调试、脉冲光源校准和光谱失配误差修正建立标准脉冲光源,之后利用此光源开展太阳电池阵电性能的地面测试,得到地面测试环境下的太阳电池功率评测结果。针对太阳电池阵在轨真实输出功率,开展温度工况和负载工况的修正,作为地面评测结果的比较基准,可以检验本文方法的评测精度。多结太阳电池电性能量化评测方法流程如图1所示。标定好短路电流的标准电池就是一把标尺,可以利用其传递和恢复标准光源。分结标定是为了更方便地分谱段调试、测试脉冲光源的光谱强度,而参考电池的引入可以使每次脉冲光源的测试都能最大程度地剔除光源不稳定的因素。

图1 评测方法流程Fig.1 Flow of evaluation method
1.1 分结标定标准子电池组
使用标准计量设备对不同产品的标准电池按照顶电池、中电池、底电池进行分结标定,形成标准电池组,其中包括标准顶电池、标准中电池、标准底电池在AM0条件下的光谱响应度、量子效率ηn及短路电流Isc,n(顶电池n=1,中电池n=2,底电池n=3)。深空探测器标准子电池组如图2所示。
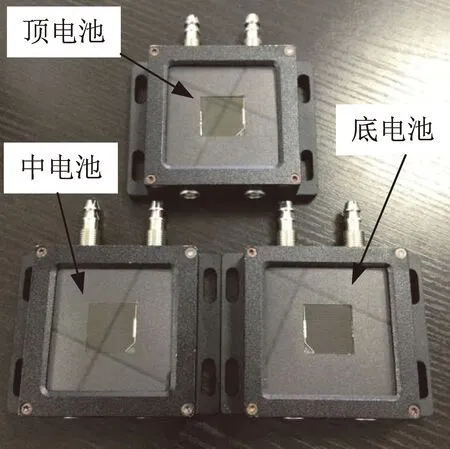
图2 标准子电池组示例Fig.2 Example of standard sub-solar-cell
在光学实验室使用绝对光谱响应度基准装置,依据《光电探测器相对光谱响应度校准规范》(JJF1150-2006)的校准规程,按照20 nm波长步进精度对评测对象,即产品A和产品B的标准子电池分别开展短路电流的标定。这2种参评产品是2个不同研制单位的太阳电池产品,采用不同的生产制造工艺,在国内深空太阳电池领域中指标较好。绝对光谱响应度的测量结果如图3所示,量子效率的测量结果如图4所示。
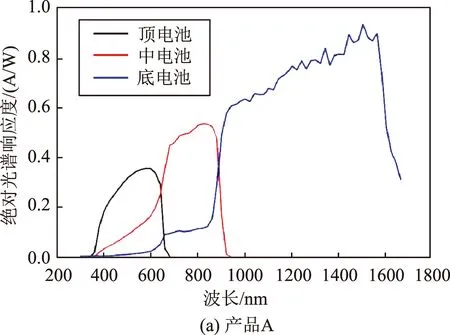
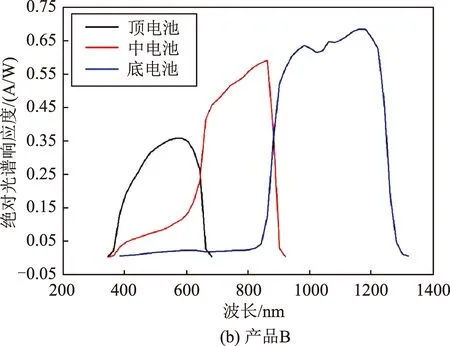
图3 产品A与产品B的绝对光谱响应度Fig.3 Absolute spectral response of product A and B
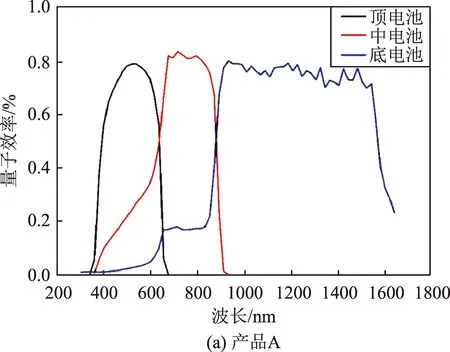

图4 产品A与产品B的量子效率Fig.4 Quantum efficiency of product A and B
根据式(1),计算出在AM0条件下的理论短路电流值。这样,由顶电池、中电池、底电池形成标准电池组,利用其短路电流作为标尺,传递标准光源数据。
(1)
式中:R(λ)为光谱响应度,A/W;S(λ)为光谱辐照度,W/m2;A为电池有效受光面积,m2。
图5为ISO 15387-2005提供的AM0光谱辐射分布。根据三结太阳电池顶电池到底电池的主要响应谱段,本文取有效响应谱段200~2000 nm,在AM0条件下,如果太阳常数取1353 W/m2,计算结果如表1所示。

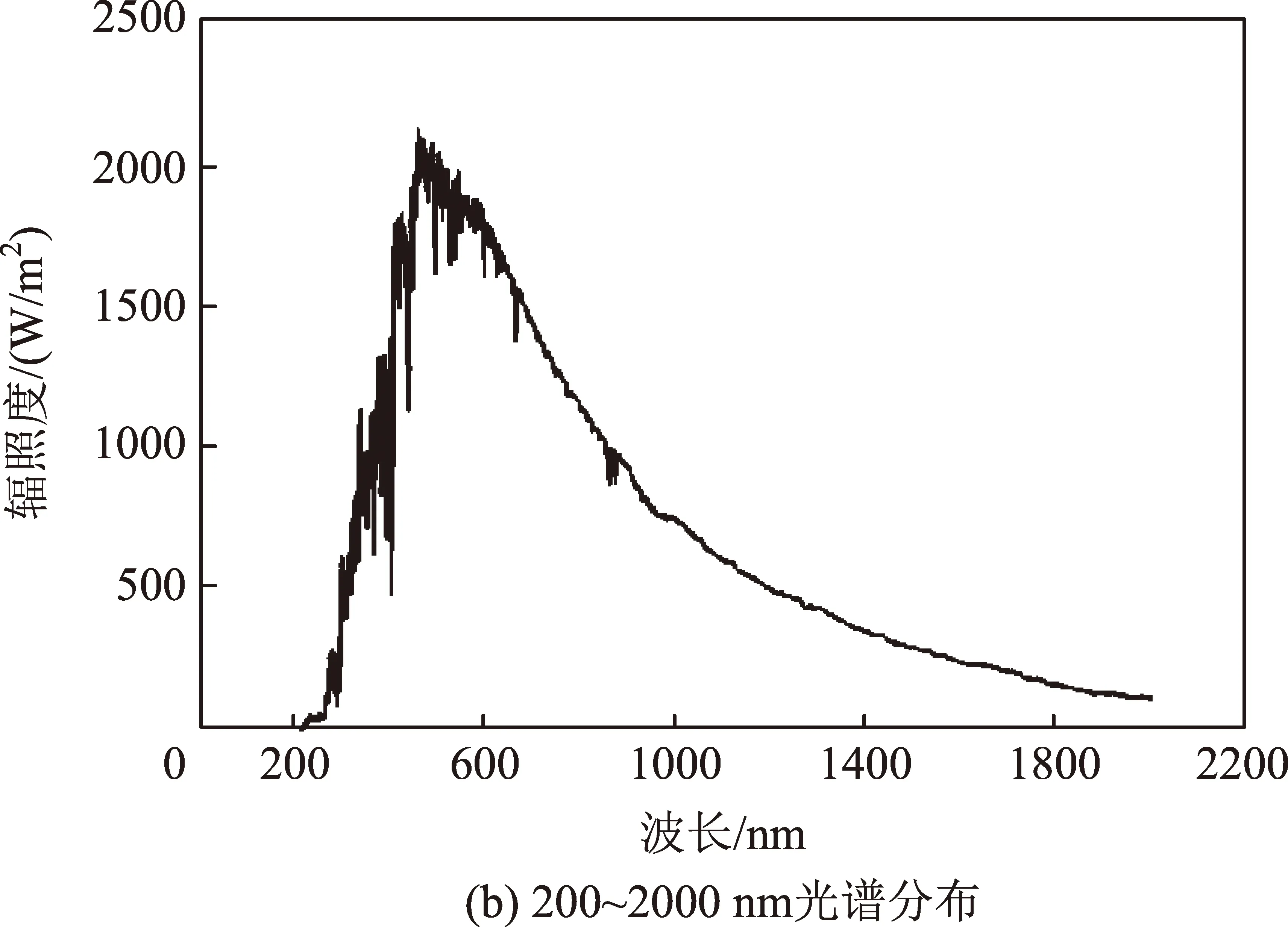
图5 ISO 15387-2005标准AM0光谱分布Fig.5 ISO 15387-2005 standard AM0 spectrum distribution
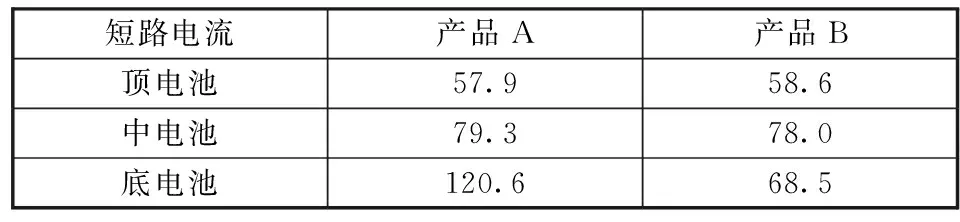
mA
1.2 光源不稳定度测试与不均匀度调试
以脉冲太阳模拟器为主要设备建立太阳电池阵测试系统,使用一片固定位置的参考太阳电池,在太阳模拟器有效光照范围内的一个平面上对辐照不均匀度进行测量评价,根据AAA级太阳模拟器对不均匀度的要求,本次选取的脉冲模拟器的不均匀度优于±2%。其具体做法为:选取能够覆盖被测组件面积的工装架(一般为方形),工装平面的法线(工装平面)应与光束的中心线平行,因为目前探测器的太阳翼驱动机构(SADA)对日定向精度误差一般在5°以内,为加强地面验证精度,本文测试系统中要求夹角不大于3°。将被测组件固定在工装架正中,如图6所示,按照被测组件电路的条带分布或者工装面有效光照区域平均分布来确定N个参考点,参考电池固定在其中1个参考点保持不动,将标准电池遍历N个参考点,每布置到1个新的参考点都进行脉冲光照射,得到一组标准电池短路电流/参考电池短路电流的参数,用来构造不均匀度指标,同时该比值参数也能剔除N次脉冲光源照射时不稳定度的因素。

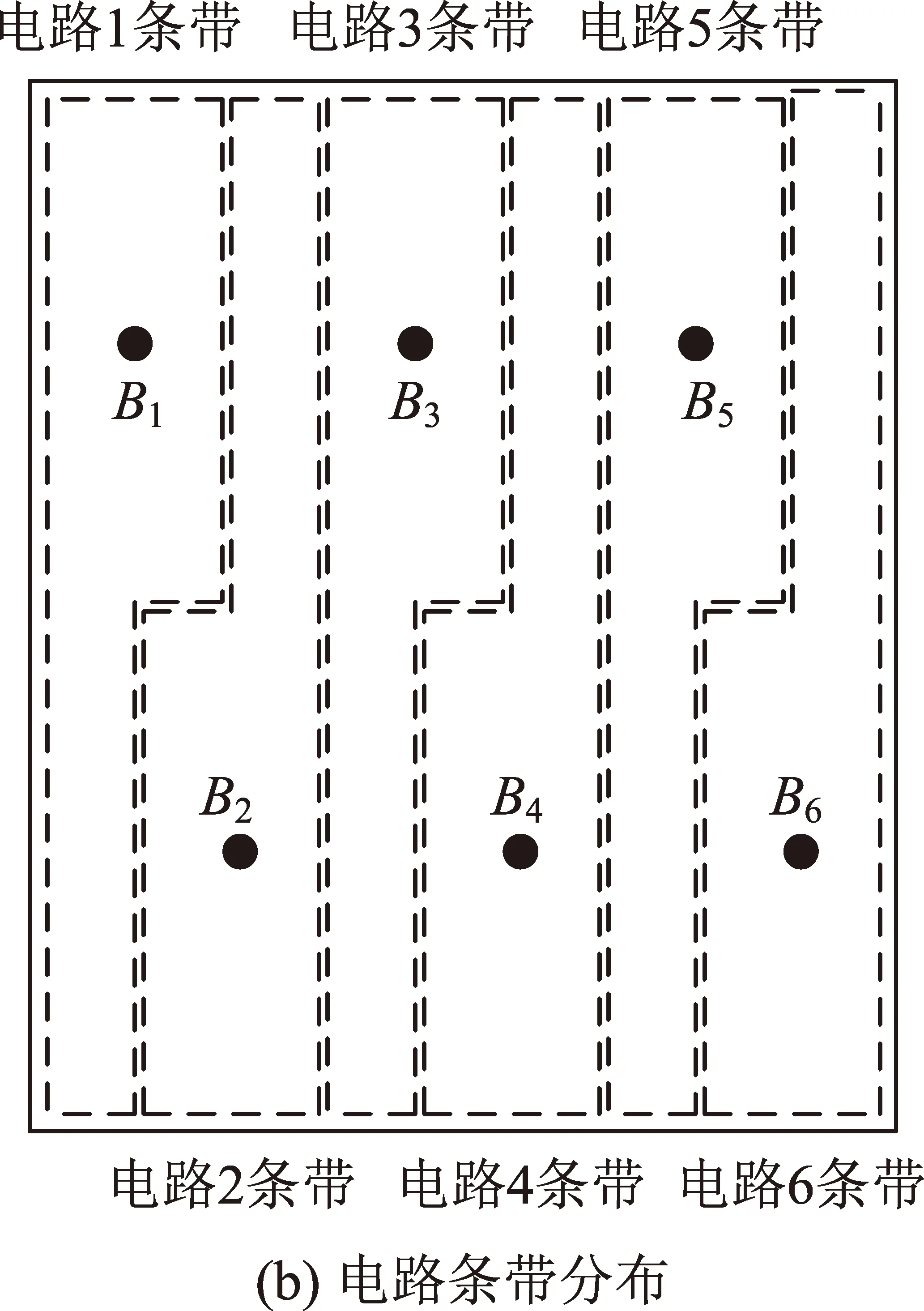
图6 参考点设置Fig.6 Reference point setting
以有效光照区域平均分布参考点为例,被测产品A和产品B的太阳电池组件面积为0.875 m×1.110 m,因此选取工装架上尺寸为1.500 m×1.500 m的有效光照区域,脉冲光源照射中心为P0点,并按照图7所示建立P0~P8共9个参考点。
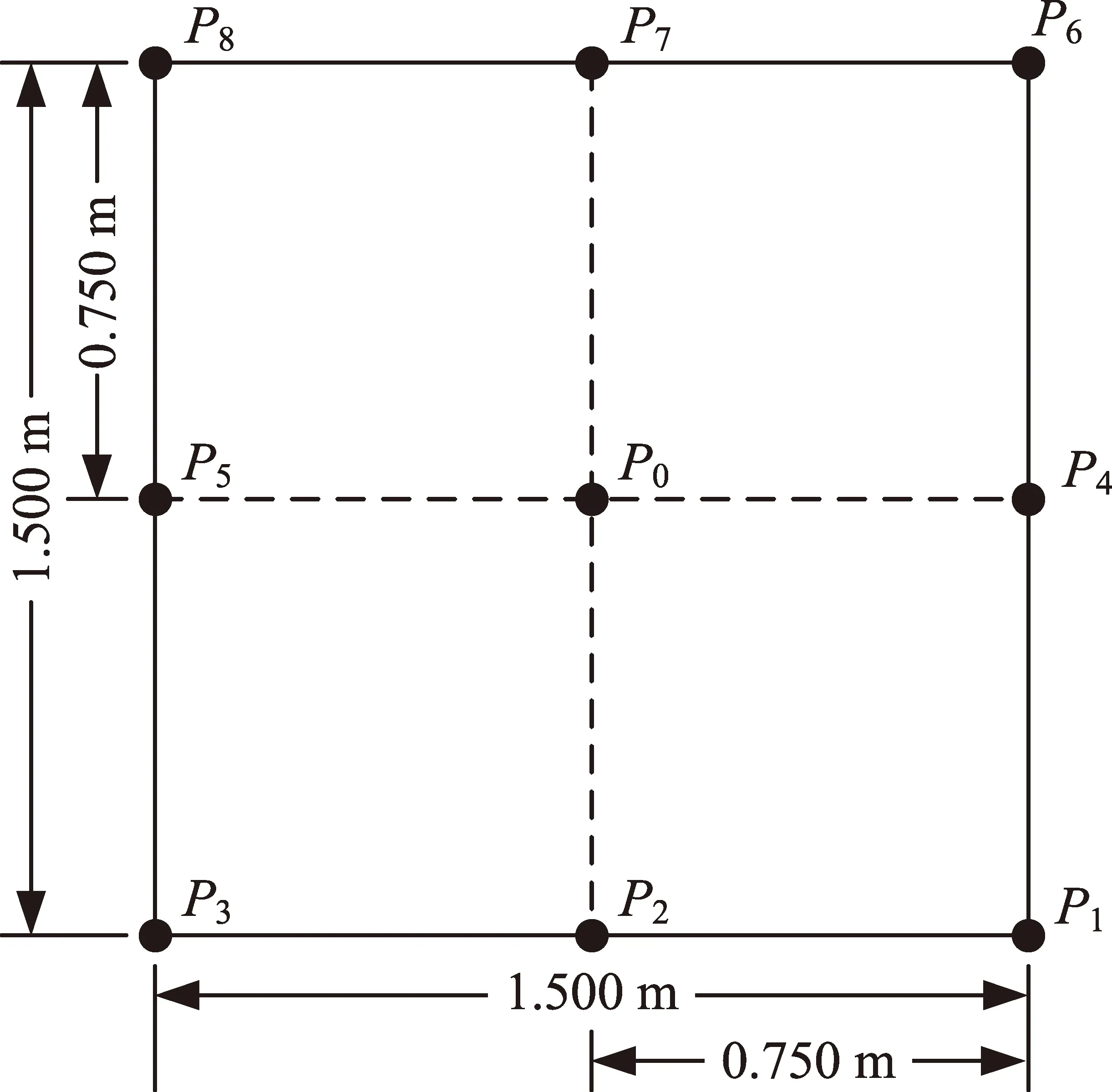
图7 测试平面及辐照不均匀度测点位置Fig.7 Test plane and position of irradiance non-uniformity measurement point
将标准电池中的顶电池固定在P0处,保持电池正面面对脉冲灯箱,在后续测试过程中工装支架姿态和位置不能改变。使用标准电池工装专用电缆,将顶电池工装连接至测试系统的被测组件通道。将参考电池片固定在工装架P1位置,使用测试专用电缆将参考电池连接至测试系统的参考通道,参考电池在整个测试过程中保持不动。
只移动标准电池,在受照平面的9个测量点以5 min的等时间间隔依次开启脉冲光源测量标准电池的短路电流值Isc,s和参考电池的短路电流值Isc,r,并按照式(2)计算剔除不稳定度的辐照不均匀度。
(2)
式中:(Isc,s/Isc,r)max和(Isc,s/Isc,r)min分别为9个测量点中标准电池与参考电池之比的最大值和最小值。
计算所得δ若小于2%,则脉冲光源满足不均匀度和不稳定度的要求;否则,调整脉冲光源和工装架测试平面并重新测量,直至满足δ小于2%的要求。这样,利用参考电池配合标准电池同步接收脉冲光源,剔除了脉冲太阳模拟器光源不稳定度的因素。
1.3 脉冲光源校准
反复将顶电池、中电池、底电池固定在P0处,保持电池正面面对灯箱,使用标准电池工装专用电缆接至测试系统的被测组件通道。开启脉冲光源,测试标准电池的短路电流,与子电池的标定值做比较。如果电流误差超过±1%,则调试脉冲光源的光强,以及与该子电池波长匹配的滤光片,使脉冲光源的辐照度和光谱分布达到要求,调试过程保持短路电流匹配。测试过程中始终保持参考电池位置不动,且参考电池的短路电流响应误差始终保持在一个固定值,用于消除脉冲光源的不稳定度影响。
1.4 光谱失配误差修正
即便是同一批次生产的标准电池和被测电池,其光谱响应度也可能存在差异,而且地面模拟光源在辐照度分布上难以达到标准太阳光谱,因此需要进行光谱失配误差修正。测试太阳模拟器的相对光谱辐照度、各标准子太阳电池的相对光谱响应、各被测三结太阳电池的相对光谱响应,其光谱失配误差应优于±1%(底电池为锗结时,光谱响应范围的差异较大,因此可将光谱失配误差指标放宽到优于±5%),否则应进行光谱修正。按照式(3)计算太阳电池与被测三结太阳电池相应子结的光谱失配误差。
(3)
式中:Mj为三结太阳电池中第j个子电池光谱失配误差;ES为太阳模拟器光谱辐照度相对值,W/m2;λ为波长,nm;λ1和λ2分别为被测电池某子结的光谱响应最短波长和最长波长,nm;λ3和λ4分别为对应标准子电池的光谱响应最短波长和最长波长,nm;ST,j为被测电池中第j个子结的光谱响应;ER为标准AM0光谱辐照度,W/m2;SR为标准太阳电池相对光谱响应。
在太阳模拟器的测试平面上依次放置顶电池、中电池、底电池3个子标准太阳电池,反复调节光源的光谱分布和辐照度,使得3个标准电池的短路电流与标定电流值之间满足式(4),且标准电池的顶电池、中电池、底电池的短路电流与修正后的校准值偏差绝对值也应分别小于1%,1%,5%。
(4)

2 在太阳电池阵地面测试中的应用
使用上述方法对Spectrolab LAPSS-II脉冲型大太阳模拟器进行光源校准,校准后光源对嫦娥五号上升器太阳电池阵产品组件(产品A和产品B取相同可比组件)开展地面测试。Spectrolab LAPSS-II脉冲型大太阳模拟器的主要技术指标见表2,实物如图8所示。
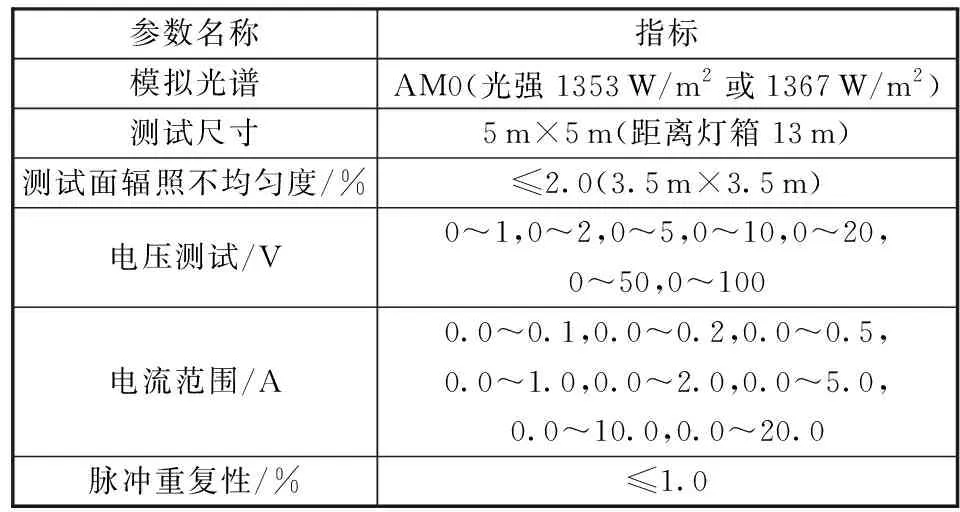
表2 Spectrolab LAPSS-II脉冲型大太阳模拟器参数Table 2 Parameters of Spectrolab LAPSS-II pulse solar simulator

图8 Spectrolab LAPSS-II脉冲型大太阳模拟器Fig.8 Spectrolab LAPSS-II pulse solar simulator
经标准电池片进行光源校准和失配误差调整后,使用脉冲光源依次对产品A和产品B的5个电池电路组件分别开展光照试验,测得10个太阳电池电路的伏安曲线特性,并对测试环境温度进行25 ℃的校准。根据工作点电压进行功率统计,如表3所示。根据表3中产品A和产品B各电路的电流,可以得到它们总电流的地面评测结果为17.761 A和18.334 A。

表3 太阳电池电路功率统计Table 3 Power statistics of solar cell circuits
3 在轨评测验证
3.1 在轨数据分析
嫦娥五号上升器太阳电池阵突破了传统的对称式设计,方案最终采用了异构电路式设计,2个分阵分别选用产品A和产品B,一方面提高了太阳电池阵产品的可靠性,另一方面也为评测结果的在轨验证奠定了基础。上升器太阳电池阵展开对日定向姿态建立后,在太阳光照的辐射作用下建立热平衡状态,待各电池板温度达到稳定后,稳定负载下的电池阵电压、电流、温度状态见图9。
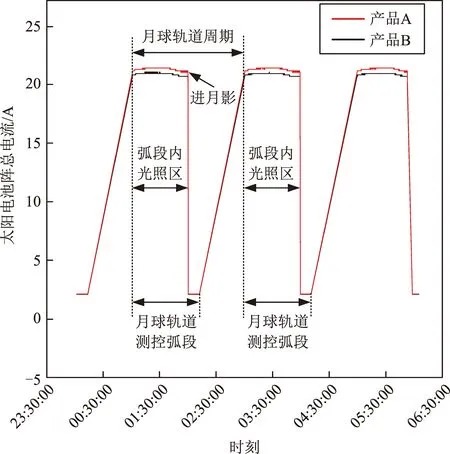
图9 产品A和产品B太阳电池阵总电流在轨测试数据Fig.9 On-orbit test data of total current of solar array of product A and B
上升器从月面起飞后进入200 km高的环月轨道飞行,绕月周期约2 h。从电流遥测数据可知,深空测控弧段与光照区大致重合,测控弧段略滞后于光照区,因此上升器进月影的事件发生在测控弧段内,进月影后太阳电池阵停止发电。测控弧段的光照区内,产品A和产品B的等效在轨平均电流分别为18.674 A和19.081 A,均优于地面评测结果的17.761 A和18.334 A,以等效在轨平均电流为基准,产品A和产品B的地面评测误差分别为-4.891%和-3.917%。
由于太阳电池的地面测试与在轨测试在环境温度和负载模式上均有差异,为了更准确、量化地比对在轨数据与地面数据,需要对在轨数据进行修正。
3.2 环境温度修正
太阳电池的电流与温度正相关,电压与温度负相关。航天器电源系统一般将工作点设置在太阳电池阵伏安曲线的恒流段,且工作点电压与最大功率点电压留有较大余量,在太阳电池产品的末期高温工况仍满足恒流段工作,因此只需要对工作点的电流进行温度还原修正。
嫦娥五号上升器每个太阳电池阵(产品A和产品B),在不同电路位置分别配置了3个热敏电阻作为温度传感器,各测温点的在轨温度与产品平均温度见图10。
太阳电池阵产品的温度修正函数为
IAM0,25℃=IAM0,orbit/[1+β(Torbit-25)]
(5)
式中:IAM0,25℃为温度修正后太阳电池阵在轨AM0工况下工作点电流,A;IAM0,orbit为太阳电池阵在轨AM0工况下工作点电流,A;Torbit为太阳电池阵在轨AM0工况下实时温度,℃;β为太阳电池阵温度系数,单位面积温度系数为+0.01 mA/(cm2·℃),结合电池单体面积及电路并联设计,取0.010 2 A/℃。
在轨数据温度修正后的电流值如图11所示。计算温度修正后产品A和产品B的等效在轨平均电流分别为18.105 A和18.426 A,以此为基准衡量地面评测结果17.761 A和18.334 A,误差分别为-1.901%和0.497%,较温度修正前的评测准确度有了较大的提升。然而,由于产品A和产品B的太阳电池电路交错分布,根据负载状态和分流输出电路序号设计,产品A的5个电路和产品B的5个电路工作状态并不相同,为了进一步准确评估地面评测准确度,需要对温度修正后的在轨平均电流开展负载模式修正。

图11 温度修正后电流值(测控弧段内)Fig.11 Current values after temperature correction (within TT&C arc)
3.3 负载模式修正
在轨实际工况中,各电池阵电路工作于分流或输出模式。输出模式对应重载工况,电流通过负载电路形成闭环;分流模式对应轻载工况,电流通过分流模块/分流开关管形成闭环。因此,在输出模式下,负载越重电路电压高;而分流模式下,电路电压为分流模块/分流开关管的导通压降,与输出模式电压相比可近似为零。
理论上,太阳电池电路工作在伏安曲线的恒流段,但是实际电路输出特性对应不同负载模式/工作电压时,其输出电流仍有一定的变化,即随着工作电压逐渐提升(负载加重),输出电流在恒流段近似线性的减小,直至电压增加到固定工作电压点,输出电流最小,如图12所示。
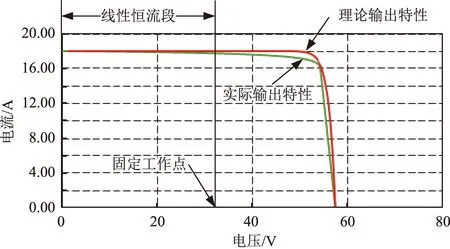
图12 太阳电池阵理论输出特性与实际输出特性Fig.12 Theoretical and practical output characteristics of solar array
太阳电池阵地面评测时,在工作点电压的基础上考虑一定的线路压降损耗,各电路只考察固定电压点的产品性能,与在轨实时工况并不一致。如图13所示,当探测器刚从阴影区进入光照区时,根据能量平衡策略,需要太阳电池阵为蓄电池组充电,各电路电压较高;在光照区随着充电过程的持续,蓄电池充电电流逐渐降低,部分电路按照工作电路序号依次进入分流模式,工作电压降低。
为了精确比对地面评测与在轨数据,需要各电路在轨实时变化的负载工况统一为工作在固定电压点的负载工况。负载模式修正方法为:①根据产品A和产品B的输出特性建立负载模式修正函数;②给出产品A和产品B在轨平均工作电压曲线;③将②获得的曲线数据作为变量,输入①的修正函数中,得到修正量曲线;④将产品A和产品B在轨工作电流曲线叠加③中获得的修正量曲线,得到负载模式修正后的等效在轨电流。下面给出具体修正结果。
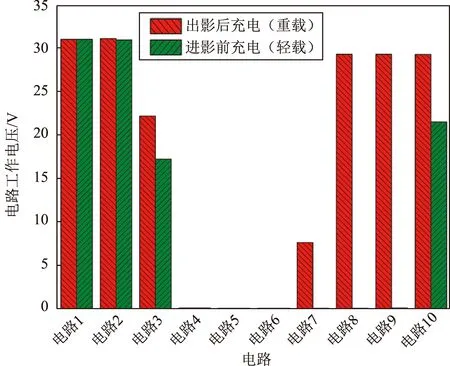
图13 探测器出月影后及进月影前各太阳电池阵工作电压分布Fig.13 Working voltage of each solar array after and before lunar shadow
1)建立负载模式修正函数
根据各电路地面测试的伏安曲线纵向叠加,得到产品A和产品B的线性恒流段的特征点坐标值,分别为(33.000,17.761),(0.000,18.036)和(33.000,18.334),(0.000,18.693),代入线性拟合的公式y=kx+b中,反解得到产品A和产品B的系数kA为-0.008 33,kB为-0.010 88,bA为18.036,bB为18.693。
(6)
(7)
产品A和产品B的负载模式修正函数为
ΔIA=kA·UA+bA-IA@33V=
-0.008 33×UA+0.275
(8)
ΔIB=kB·UB+bB-IB@33V=
-0.010 88×UB+0.359
(9)
在式(8)和式(9)中:UA和UB分别为产品A和产品B的各电路测控弧段内光照期平均工作电压;IA@33V和IB@33V分别为产品A和产品B的各电路在33 V工作点电压的电流总和。
2)平均工作电压曲线
根据产品A和产品B各电路测控弧段内光照期的分阵电压,给出平均工作电压曲线,如图14所示。
3)修正量曲线
以平均工作电压为输入,代入负载模式修正函数,得到修正量ΔIA和ΔIB的曲线,如图15所示。
4)负载模式修正后的等效在轨电流
在温度修正后的太阳电池阵总电流基础上减去修正量,得到最终的在轨总电流曲线,如图16所示。
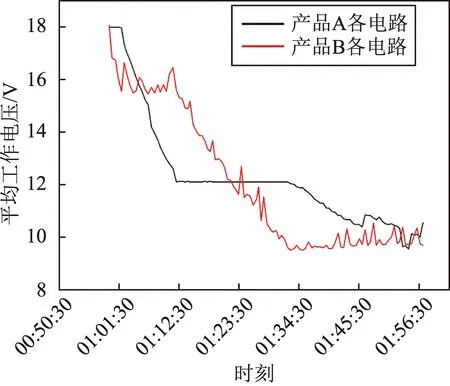
图14 平均工作电压Fig.14 Average operating voltage

图15 修正量ΔIA和ΔIB曲线Fig.15 Correction curve of ΔIA and ΔIB
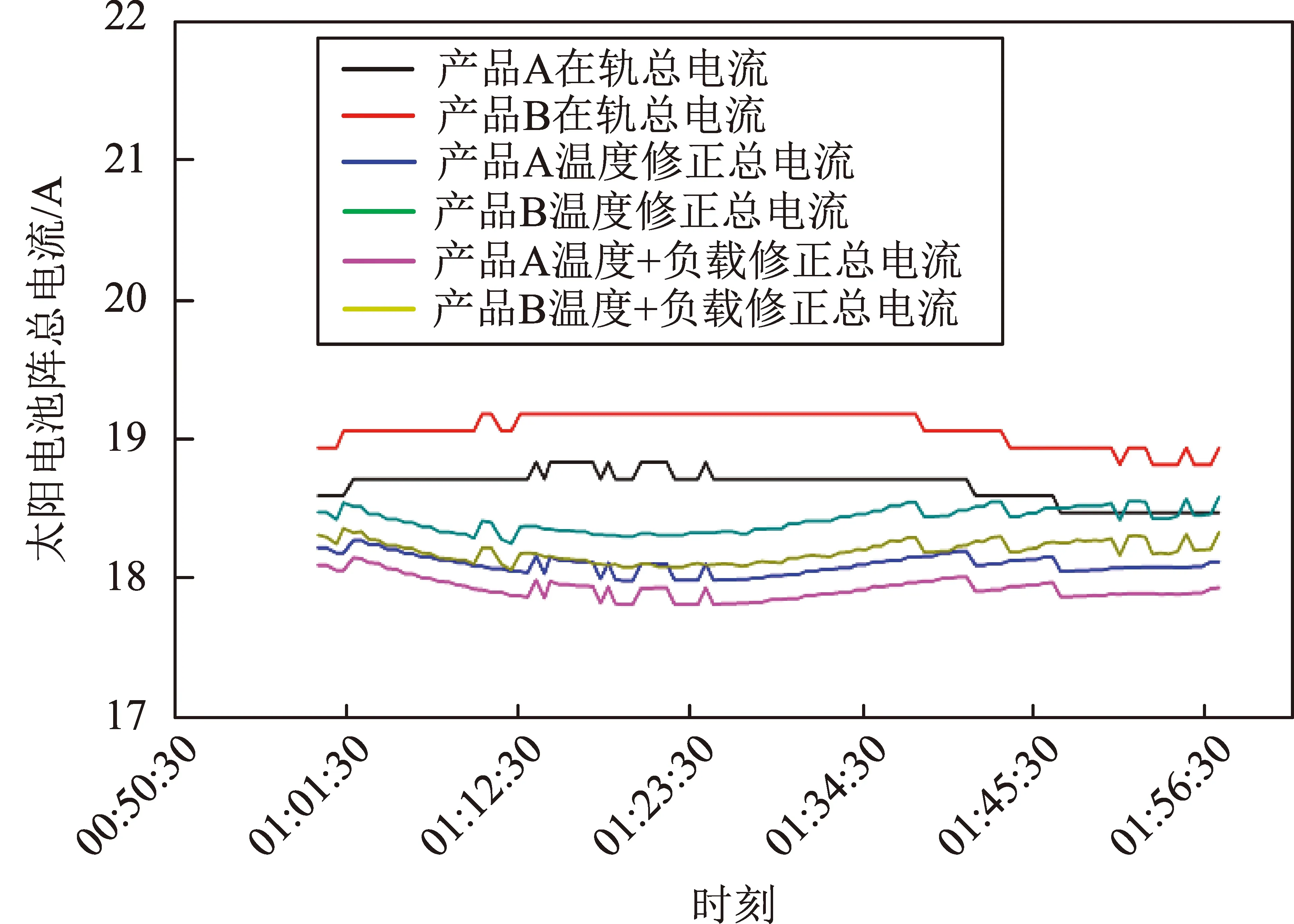
图16 温度修正和负载修正后的电流值Fig.16 Current values after temperature correction and load correction
计算温度修正和负载修正后产品A和产品B的等效在轨平均电流分别为17.933 A和18.198 A,以此为基准衡量地面评测结果17.761 A和18.334 A,误差分别为-0.957%和0.748%,相较于温度修正后、负载修正前的评测准确度有了进一步提升,评测准确度达到±1%以内。通过对比,证明了本文提出的评测方法具有很高的评测精度,可用于后续深空等多领域航天器对太阳电池阵性能的评测中,且具有较好的可操作性,可为太阳电池阵的精细化设计提供有力支撑。
4 结束语
本文针对深空探测器太阳电池阵选定工作点电流的关键指标开展专项评测,利用标准电池和参考电池建立脉冲光源标准光源,可有效解决太阳模拟器合成光谱分布与AM0标准光照条件的不一致问题,脉冲光源均匀性和稳定性兼容性问题,以及电池失配修正问题。使用本文的评测方法,以嫦娥五号上升器太阳电池阵参评产品为评测对象开展地面评测,最终得到评测对象产品A和产品B的选定工作点电流关键指标的地面测试数据17.761 A和18.334 A。通过对在轨飞行遥测数据的环境温度修正与负载模式修正,得到了评测结果的比较基准,通过分析与计算,基于修正后的基准指标,产品A和产品B的地面评测结果误差分别为-0.957%和0.748%,相较于修正前的评测误差-4.891%和-3.917%有了很大提升,评测准确度达到优于±1%的量级。本文提出的评测方法评测精度高、评测方法可移植性强、具有很高的可操作性,可用于后续深空及其他领域航天器的太阳电池阵性能评测中,有利于后续航天器太阳电池阵的精细化设计。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
农业工程学报(2022年8期)2022-08-08
黑龙江大学自然科学学报(2022年1期)2022-03-29
家庭影院技术(2021年1期)2021-03-19
科学导报(2021年7期)2021-02-22
晚晴(2016年11期)2016-12-20
哈尔滨理工大学学报(2014年3期)2015-01-04
现代计算机(2009年9期)2009-12-02
移动信息(2009年4期)2009-06-18
数码世界(2009年3期)2009-04-26
