
空间抓捕系统绳网的设计与研制
2021-04-28 08:39许望晶王立武唐明章王文强李少腾
航天器工程 2021年2期
许望晶 王立武 唐明章 王文强 李少腾
(1 中国航天科技集团有限公司航天进入、减速与着陆技术实验室,北京 100094)(2 北京空间机电研究所,北京 100094)
空间碎片主动清除方式(Active Debris Removal,ADR),尤其是地球静止轨道废弃卫星清理已成为航天界关注的热点问题。美国国家航空航天局空间碎片计划负责人Johnson[1]指出自2020年起,每年清除5~20个大型空间碎片就可抑制空间碎片总量的增长,从而保证未来空间环境不再持续恶化。至此,空间碎片主动清除被提上了各国空间技术的发展日程。
目前国内外空间碎片主动清除方式主要有推移离轨、增阻离轨以及抓捕离轨等[2],空间绳网系统属于抓捕离轨方式,其以在非合作目标高可靠、远距离捕获等方面的突出优势,为空间碎片清除操作提供了一种新的解决思路,也为未来在轨服务提供了一种有效手段。空间绳网能够实现大范围的可容错捕获,对目标的适应性强,同时也可降低对目标探测识别与消旋的要求,与传统的机械臂捕获离轨方式相比,绳网捕获具有压缩体积小、发射质量轻、抓捕距离远、容错范围大、对载体影响小等突出优势。目前多国研究机构启动了空间绳网抓捕的研究项目[3-4],典型的有美国的“抓捕、取回、固定有效载荷”可展开网捕捉器(GRASP),欧洲航天局的机械人地球静止轨道复位器项目(ROGER)[5]及其后续项目主动碎片移除计划(e.Deorbit)[6-8]。2019年3月,欧空局完成了世上首次空间绳网在轨捕获验证试验,通过弹射6个重约1 kg的质量块将绳网拉出展开,绳网最大展开口径为5 m,将6 m外的模拟目标捕获,证明了绳网在轨捕获的可行性。
国内也一直在跟踪、研制空间抓捕系统,其中绳网作为核心的抓捕执行部件尤为关键。在实际研制时,选用什么样的绳网结构、采用什么的材料、怎么编制绳网以及绳网如何折叠包装可有序拉出展开,这些都是在绳网设计和研制过程中需要解决的难题。本文结合空间绳网工程样机研制情况,针对这些难题的解决进行了分析和设计,以期为后续的研究提供参考和借鉴。
1 绳网方案设计
空间绳网是一种针对空间非合作目标主动清除的新型手段,工作过程如图1所示,其由空间机动平台携载,在与空间目标保持一定飞行距离的情况下,通过在轨发射、展开一张由柔性绳编织的大网,以空间覆盖的方式进行抓捕,可提高空间目标抓捕的安全性和可靠性,抓捕目标后,将机动平台与目标间通过系绳连接形成绳系组合体,可拖动目标离轨,实现主动清除。
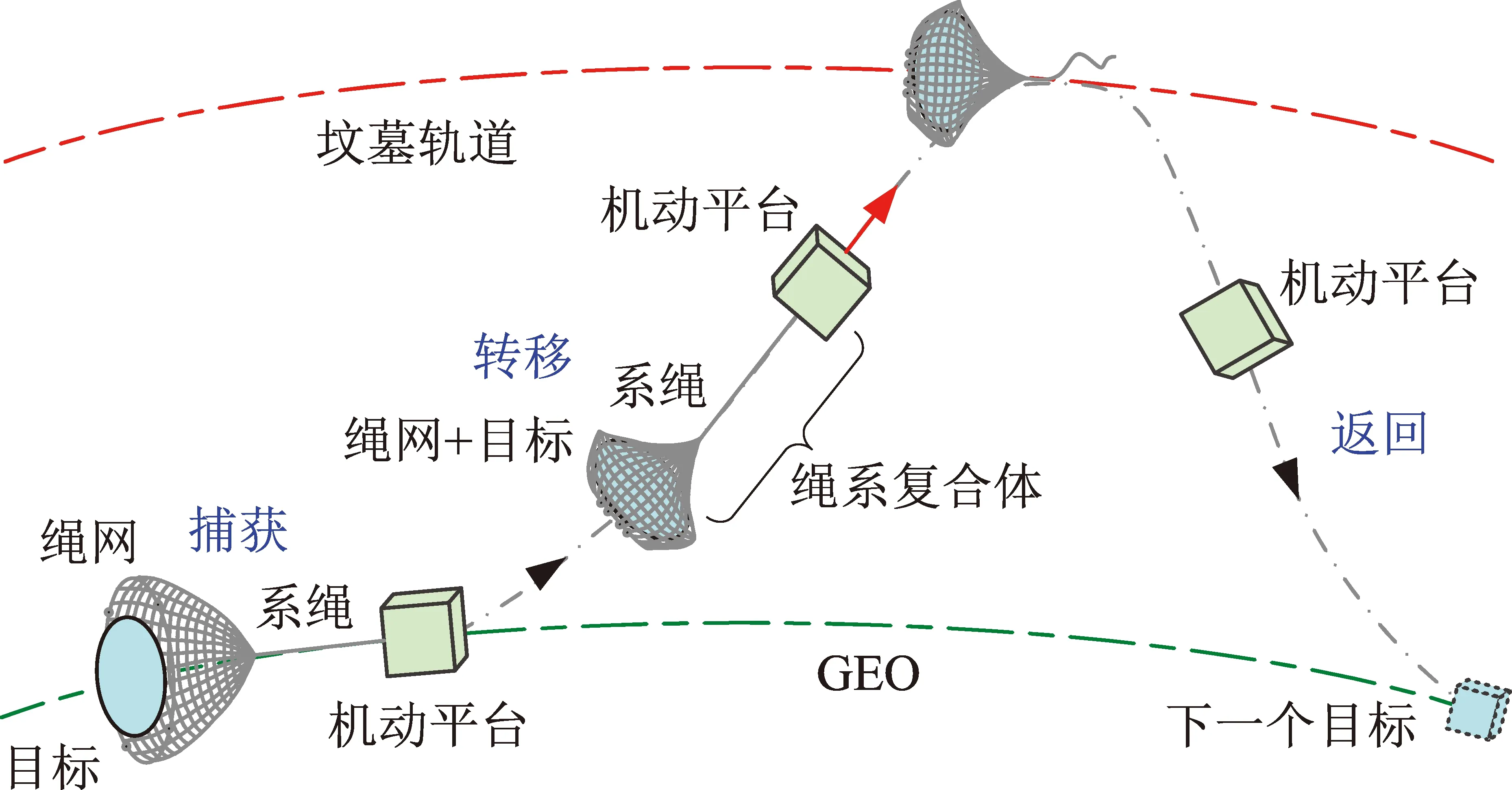
图1 空间抓捕系统工作过程示意Fig.1 Diagram of space inflatable net capture system
绳网以收拢折叠方式经历主动段过载,入轨后需要抓捕目标时,首先解锁网包,然后通过发射装置和牵引质量块将绳网拉出展开,形成具有一定面积的柔性大网捕获目标,根据空间抓捕系统工程样机任务分析,提出本文的设计约束条件如下:
(1)可抓捕最大直径20 m、最小直径1 m的空间目标;
(2)在弹射张开包裹目标过程中极端情况受力最大为500 N;
(3)拖曳过程中的最大受力为1600 N;
(4)绳网要尽可能轻,在拉出展开过程中要防止缠绕钩挂。
本文在绳网原理样机研制的基础上,采用仿真分析、设计加工及试验验证相结合的方式开展了研究,以期实现特大型绳网技术的突破。
1.1 绳网结构设计
1.1.1 绳网构型选择
绳网的结构构型[9]设计包括网型选型设计和网目选型设计2个部分,绳网构型可以描述为由交叉节点及连接交叉节点之间的绳段组合而成。按照绳网的自然展开形状可以划分为二维平面绳网和三维绳网,从加工工艺的角度出发,二维平面绳网更易于加工。本文中绳网结构构型设计选取二维平面绳网。
中心对称性要求是绳网内力均衡性和折叠封贮两方面的共同要求,因此,网型应首先满足正边形构型,且应由多块相同网体拼接而成,用N代表绳网边数,则正三、四、六、八边形绳网可以表示为N=3、N=4、N=6和N=8,如图2所示。
对正三、四、六、八边形绳网的力学性能要求和展开性能要求进行仿真,用t表示绳网拉出展开时间,仿真结果如图3所示,经综合比较分析不同正多边形的拉出展开性能以及考虑抓捕系统的整体优化,最终选择正六边形网型作为工程样机网型。
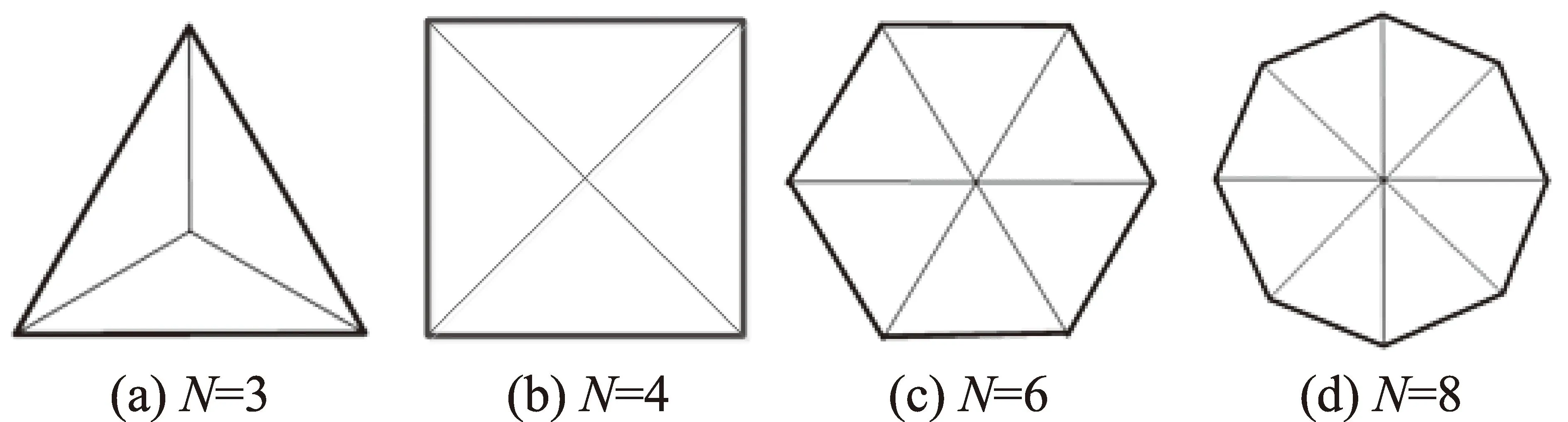
图2 网型选择示意Fig.2 Diagram of net type
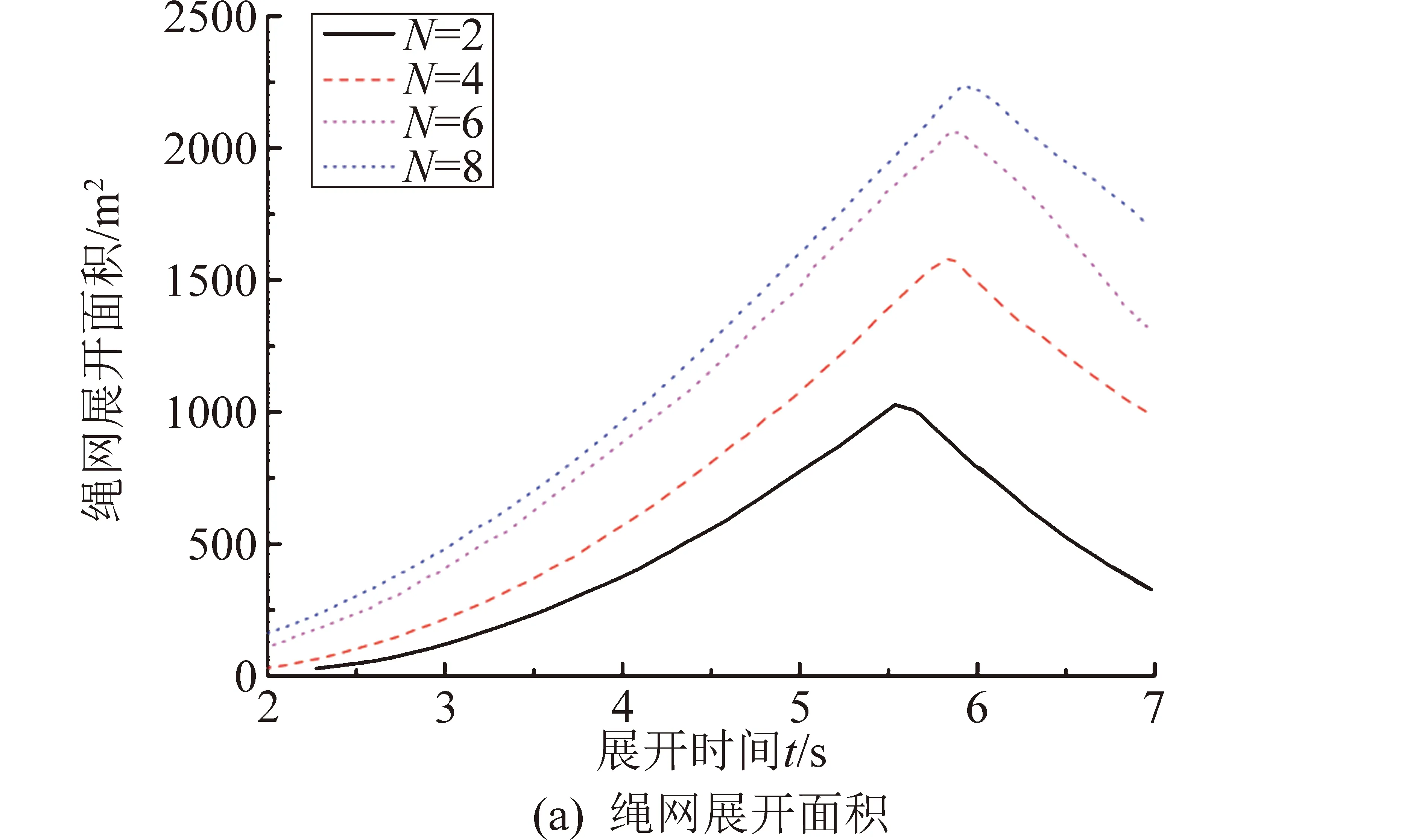
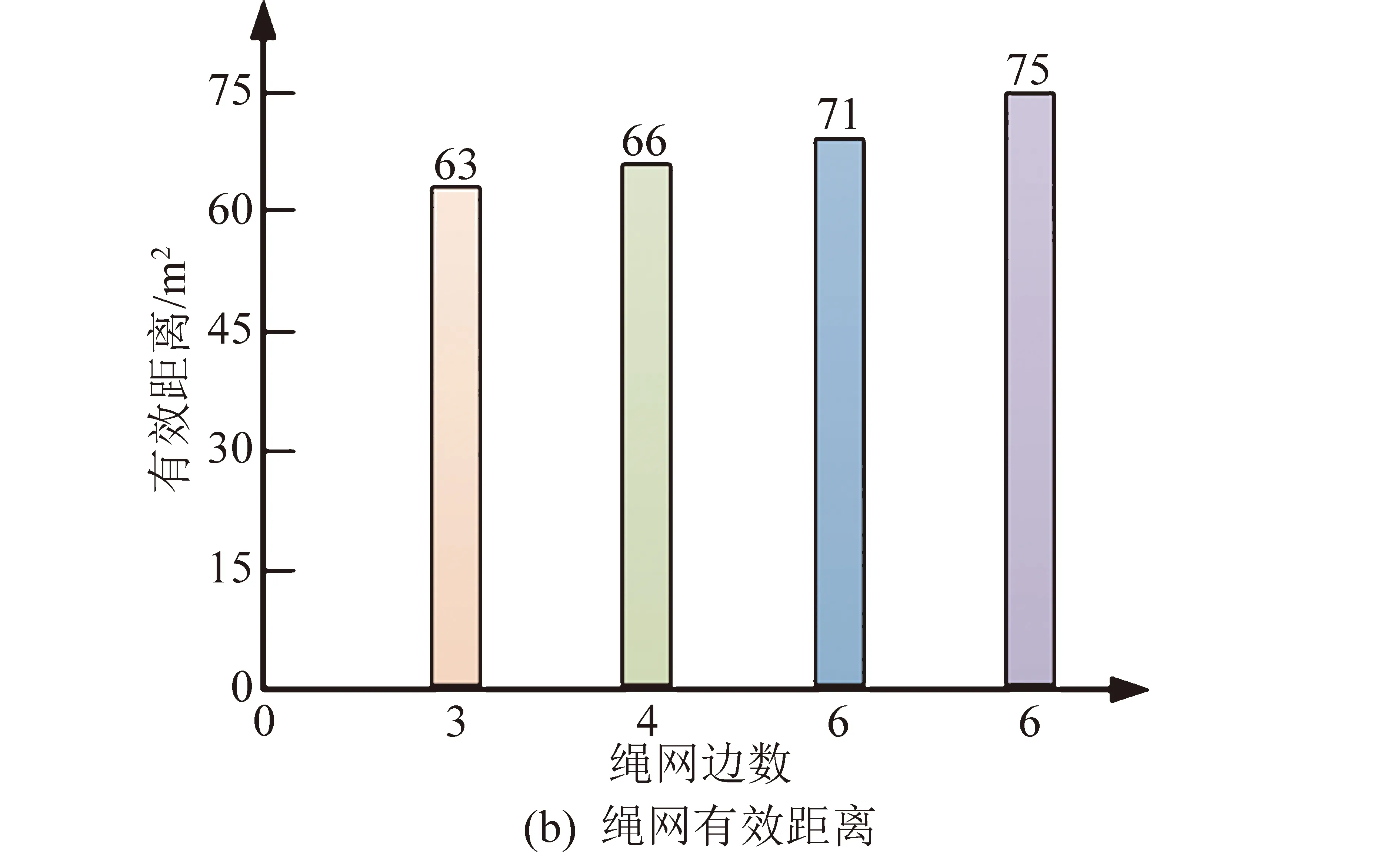
图3 不同正多边形拉出展开仿真对比Fig.3 Comparison of regular polygon net unfold simulation
常用的网目形状包括3种形状:①正三角形;②正四边形;③正六边形。用μ代表绳网网目边数,则3种网目形状可以表示为μ=3、μ=4和μ=6,如图4所示。
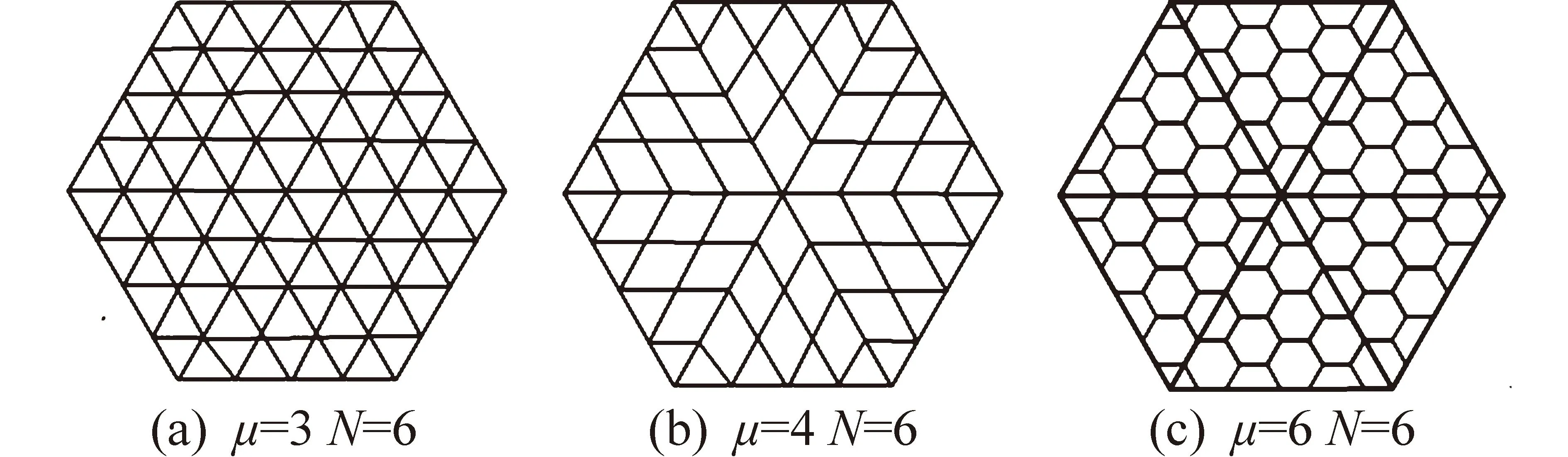
图4 正六边形绳网网目示意Fig.4 Diagram of regular hexagon net mesh
相比较于三角形网目,在不产生面内局部压缩和褶皱的情况下,四边形网目可以承受更大的剪切变形。这一点对后面绳网的折叠封装尤其重要,且六边形网目加工复杂且相对四边形网目无明显优势,因此正六边形网型网目选择四边形。
1.1.2 绳网材料选择
在绳网工作过程包含有撞击、大质量拖曳等环节,因此编制绳网的材料必须要有较大的强度;同时为节约发射成本,减轻质量,还要求该材料具有轻质高强的特点;为了便于绳网的加工和折叠封贮以及防止缠绕,要求绳网材料具有柔软、可弯曲、表面光滑等特性。此外空间环境要求绳网材料具有耐高低温、抗强辐射、抗剪切、强绝缘性等特性。纺织行业通常将具备以上一项或多项性能特点的纤维统称为高性能纤维。目前世界范围内已经工程化应用的高性能纤维材料主要包括:聚酰亚胺纤维(PI)、聚对苯基苯并二恶唑(PBO)、高强高模聚乙烯纤维(HSHMPE)、碳纤维、玄武岩纤维、Vectran纤维、间位芳纶纤维(国产名为芳纶1313)、对位芳纶纤维(国产名为芳纶1414)、杂环芳纶(芳纶Ⅲ)等,具体性能比较见表1。
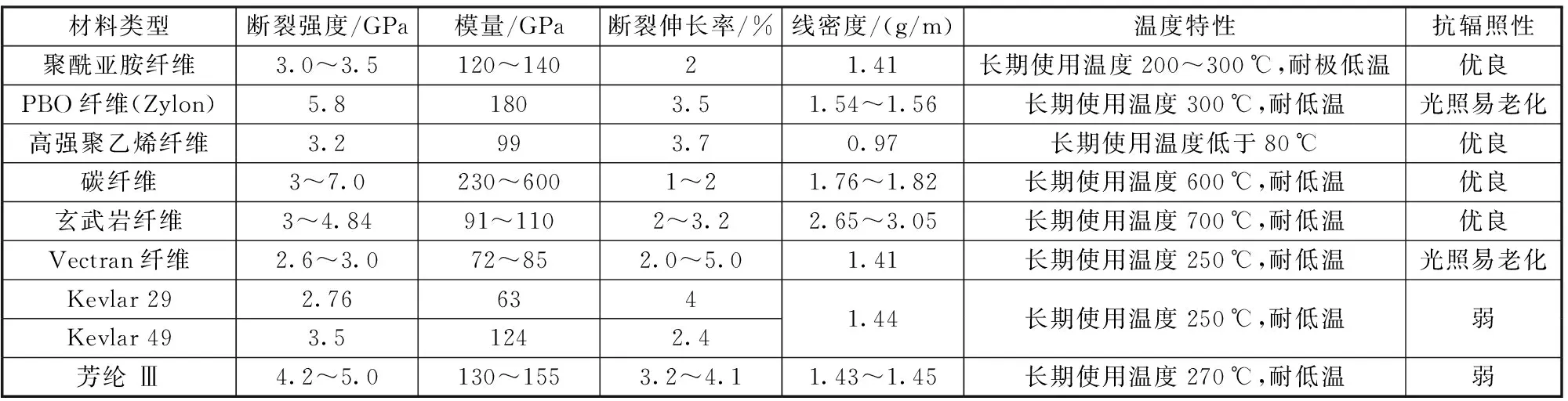
表1 高性能纤维性能比较Table 1 Comparison of high performance fibers
综合来看,所有高性能纤维材料均不能同时在所有任务关心的性能方面具备优良品质,其中,聚酰亚胺耐原子氧能力弱,碳纤维、玄武岩纤维打结强度损失大,PBO、Vectran纤维、芳纶材料的耐辐照性能较弱,HSHMPE长期使用温度低于80 ℃。若采取表面涂覆工艺或改性处理,但涂覆会导致与原状态相比纤维会变得较为刚硬,不利于绳网编制及折叠包装,且绳的直径和质量会相应增加,不推荐使用。
综上所述,经过调研分析和材料的多方案比较,综合考虑环境适应性、力学特性等因素,在低轨使用时,建议选用芳纶Ⅲ纤维,在高轨无原子氧环境使用时,可选用聚酰亚胺纤维或芳纶Ⅲ纤维。
经调研及研制,1 mm芳Ⅲ绳的额定断裂强度可为1250 N,线密度为0.8 g/m,2 mm芳Ⅲ绳的额定断裂强度可为4000 N,线密度为1.8 g/m,1 mm高强耐辐照聚酰亚胺绳的额定断裂强度可为1000 N,线密度为1.2 g/m,2 mm高强耐辐照聚酰亚胺的额定断裂强度可为2500 N,线密度为2.2 g/m。
1.2 绳网设计方案
绳网由内圈绳、外圈绳、中部绳、径向绳、系绳、收口绳和牵引绳等部分组成,如图5所示,绳网边长20 m,网目大小为0.3 m,面积近1200 m2。绳网铺平后最外圈(外圈绳)为平面六边型,中心为一个六边形孔(内圈绳),用于匹配后续结构的安装,外圈绳和内圈绳之间由六根径向绳连接,网目呈菱形,由中心向外呈辐射式排列,外圈绳与中部绳的交点处,每间隔一个点,形成一个绳环,用于穿收口绳。外圈绳围成的平面正六边形顶点处,引出有牵引绳,用于牵引绳网拉出展开;系绳连接在内圈绳围成的平面正六边形上,用于对绳网捕获的目标进行操作。
内、外圈绳、径向绳、牵引绳和系绳为绳网主要承力结构,为抵抗绳网发射过程的冲击、承受绳网碰撞目标物以及拖曳过程中的受力,材料选用2 mm芳Ⅲ绳;中部绳和收口绳材料为1 mm芳Ⅲ绳。在绳网编制时,为保证结头无松脱、滑移以及减少打结后的强度损失,通过不同打结方式的比较,2 mm芳Ⅲ绳与1 mm芳Ⅲ绳编制时采用穿插死结法进行连接,2 mm芳Ⅲ绳间编制时采用交叉穿插法进行连接。绳网编制加工后,总重约6.3 kg,2个网目的断裂强度实测为774 N,整体绳网的强度将远远大于774 N。
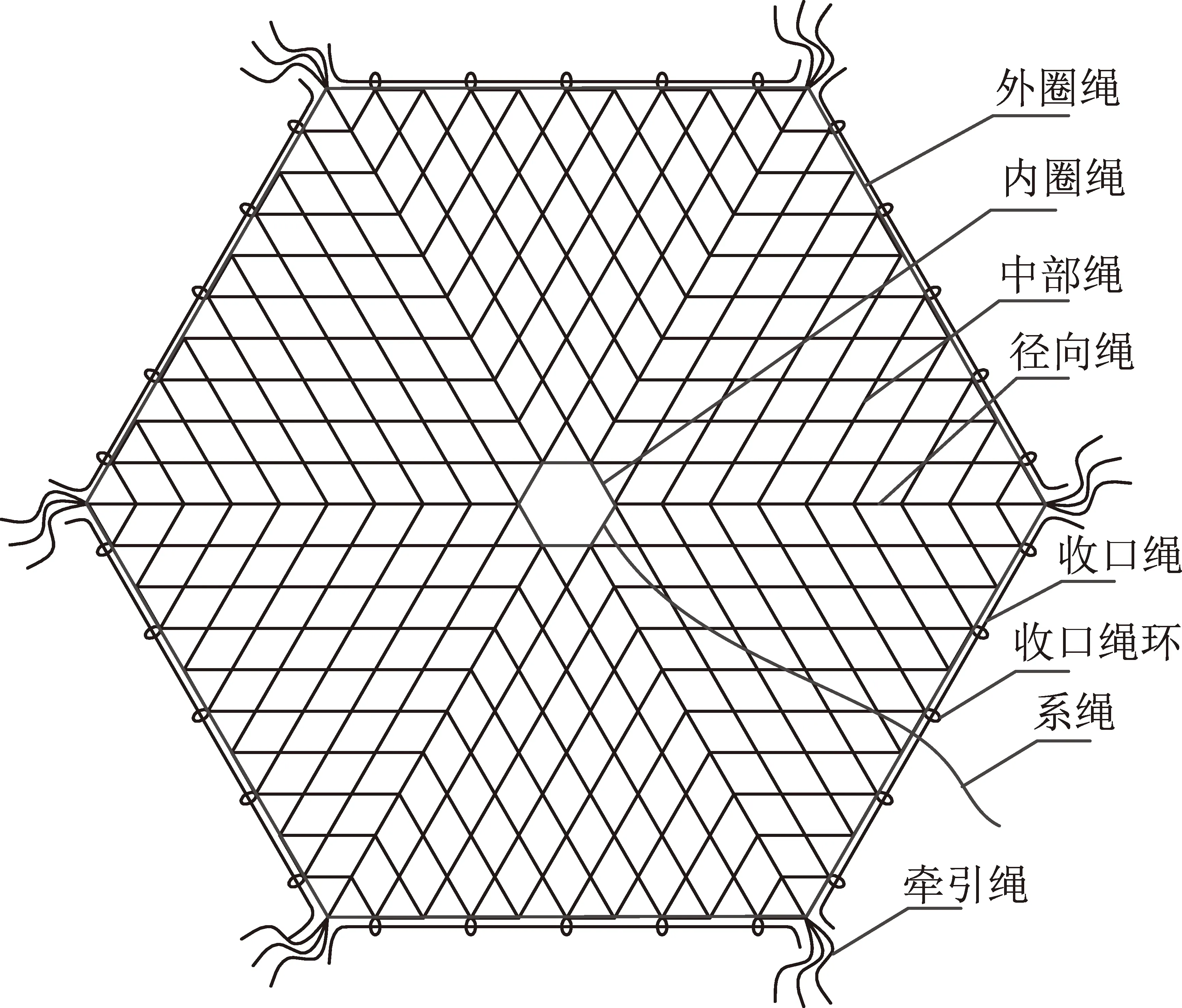
图5 绳网结构示意Fig.5 Diagram of space net structure
1.3 绳网折叠包装
绳网的折叠收纳及可靠展开是影响空间抓捕系统抓捕成败的关键,绳网折叠收纳的可靠性、一致性影响着绳网的拉出展开,因此需要设计合适的网包对绳网进行折叠包装。网包采用分区设计,分为绳网放置区、外圈绳放置区、系绳放置区,将绳网、系绳、外圈绳隔离开,同时绳网之间也有隔离,以减少缠绕、穿过和打结的发生,工作时避免绳网拉出过程中的质心偏移,实现绳网的对称拉出,过程有序可控。在研制过程中,对绳网进行了多次折叠包装和吊高出网试验,对网包以及包网工艺进行了改进、优化和完善,确保了绳网的有序拉出展开。此外采用链式封包方式对绳网进行封包,既避免了绳网折叠包装后绳网部分裸露在外的问题,也提高了绳网抗振动的能力,通过了力学振动试验的考核。
2 仿真分析
本文在文献[10]的基础上,采用集中质量法建立绳网捕获过程的动力学模型。空间绳网是具有较强非线性的多柔体系统,很难获得其解析形式的动力学方程。本文采用有限元技术将绳网离散为若干绳索单元,采用邻接表储存绳索单元间的拓扑关系,记集合conn{i}为所有与节点i的相邻的节点组成的集合,以Sij表示为连接节点i与节点j的绳段,lij为Sij的原长,Aij为Sij的截面积,ρ为材料密度,节点i的质量mi为
(1)
对于质量块,还需在式(1)上加上其质量ms。在建模过程中,首先将绳索划分单维质量集中在端点上的有限绳段单元n。绳段单元采用“弹簧”和“阻尼器”单元等效,即集中质量-半阻尼弹簧单元。单元如图6所示,绳段单元n的刚度为kn;阻尼系数为cn;rn为节点n在节点坐标下的矢径;rn-1为节点n-1在节点坐标下的矢径。
绳网点i的动力学方程都可以在地心惯性坐标系下表示为
(2)
式中:Ti、Fiex、ri分别为节点i受到的等效张力矢量、等效外力矢量和矢径;Tij为绳段Sij的张力矢量;Fijex为绳段Sij的外力矢量。
柔性体的碰撞与滑动过程属于边界条件非线性问题。在空间柔性捕获任务中,绳索不可避免地会与目标发生碰撞接触。基于Hertz接触理论的碰撞力计算方法,进行了捕获目标的动力学分析,如图7所示(单位为m),绳网在拉出3.2 s时,展开的面积最大,为1040 m2,最大拉出距离为30 m,随后绳网回弹使展开面积变小。
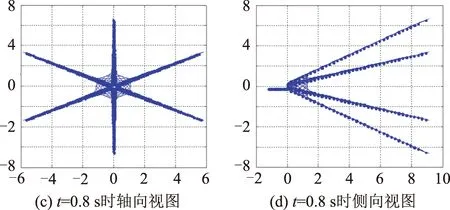
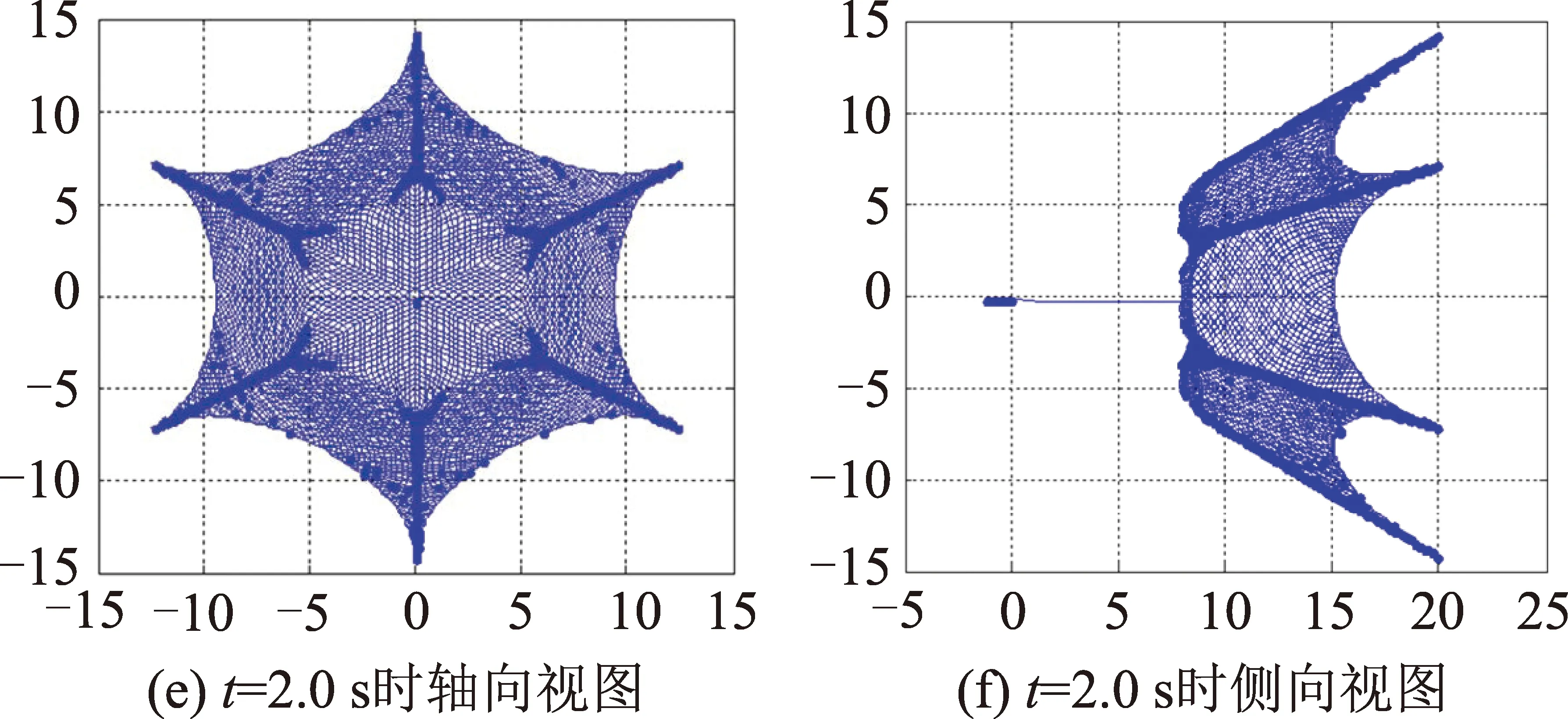
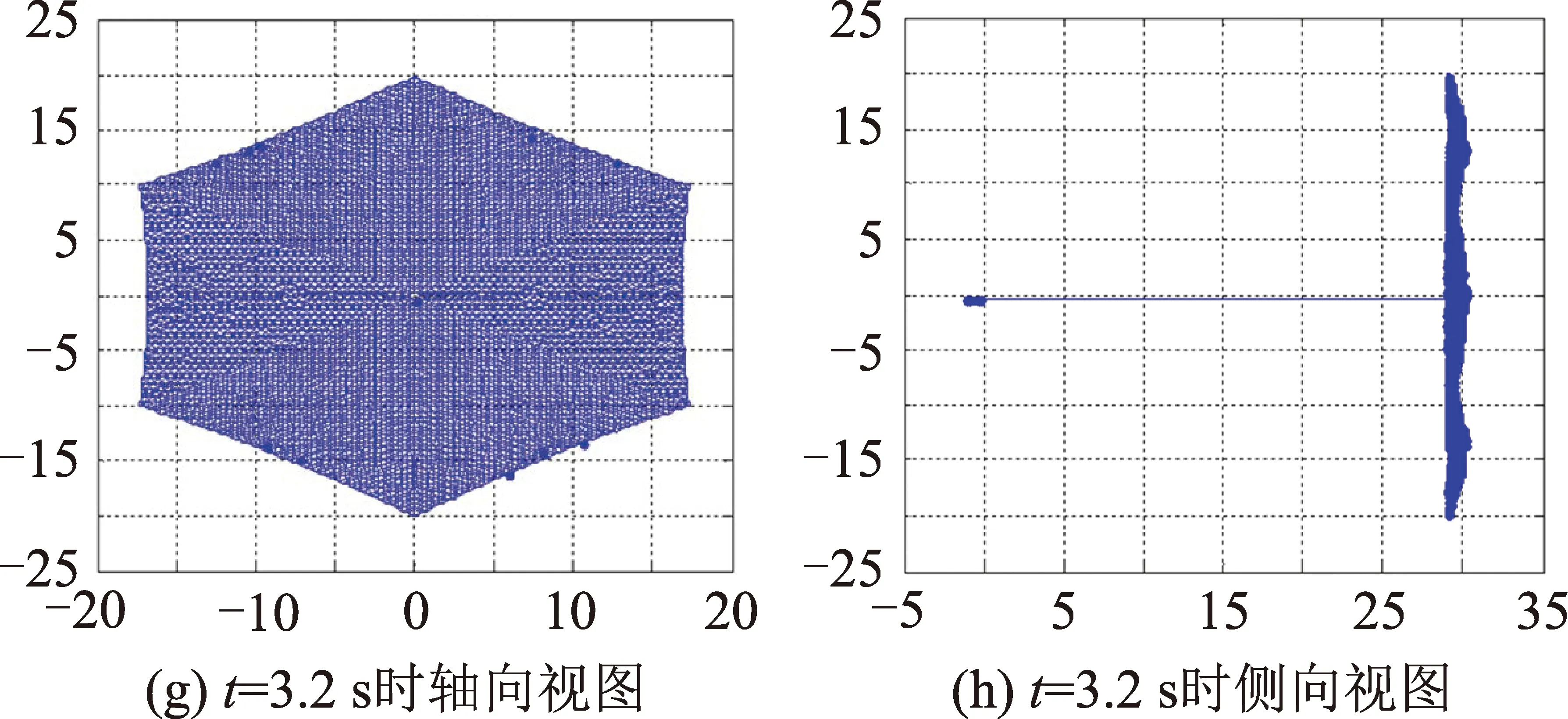
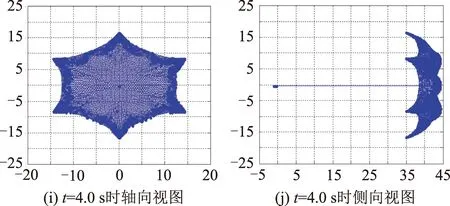
图7 绳网拉出展开过程仿真示意Fig.7 Deployment simulation of space net
3 试验验证
绳网完成研制后,参加了全系统的地面抓捕验证试验,共进行了6次试验,弹射器的弹射速度实测为14.8~15.2 m/s,绳网子系统在6次试验中均顺利解除封包、外圈绳、绳网本体依次从网包中有序拉出,将目标捕获,绳网拉出过程中无缠绕、穿过、打结和钩挂现象,如图8所示,表明绳网折叠包装工艺的可靠性和一致性可满足工程应用要求,为后续工程应用奠定了基础。
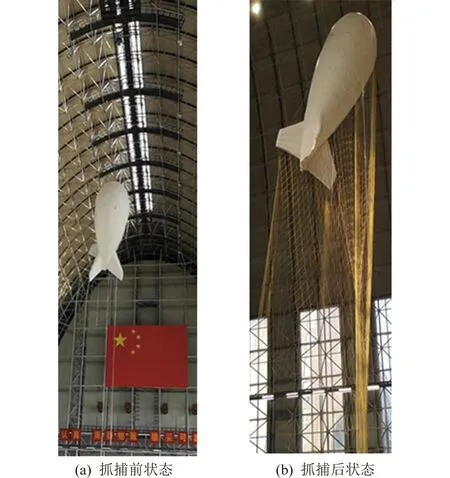
图8 地面抓捕试验中绳网捕获目标过程示意Fig.8 Diagram of space net capture target in ground test
4 结束语
空间抓捕系统绳网作为柔性捕获装置在未来的空间碎片清除和在轨服务领域中具有极大的应用潜力。本文研究了绳网的构型,通过仿真分析及实物试验对比,确定了较优构型绳网-正六边形网型正四边形网目;对比分析不同高性能纤维性能选取了合适的绳网材料,面积近1200 m2绳网仅重6.3 kg,满足了绳网质量轻、强度高的要求;研究了特大型绳网的加工方式及工艺,通过试验摸索解决了超细绳网状结构编织、节点定位和滑移控制的问题;分析了绳网折叠包装方法,通过分区隔离设计、有序管理绳网、链式封包解决了网系空间穿透控制及有展开、非等长控制绳牵拉及同步控制问题,确保了绳网的有序可控拉出展开。后续对于空间抓捕系统绳网要开展高精度动力学建模方法研究,应考虑绳网与网包、绳网间的摩擦力、空间环境对绳网应力-应变、阻尼特性的改变以及微重力等影响带来的天地一体化差异等,进一步掌握绳网拉出展开、捕获能力,以满足真实太空环境下长期在轨使用的需求。
猜你喜欢
绝缘材料(2022年9期)2022-10-20
航空学报(2022年8期)2022-09-07
百科知识(2022年11期)2022-06-17
纺织报告(2022年5期)2022-06-01
红领巾·探索(2020年9期)2020-10-26
新材料产业(2019年4期)2019-04-23
学生导报·高中版(2017年23期)2017-09-10
学生导报·初中版(2017年23期)2017-09-10
科普童话·神秘大侦探(2017年7期)2017-07-06
小学生导刊(低年级)(2016年9期)2016-10-13
