一种评定数字正射影像图平面精度的新方法
2021-04-26 00:53:02胥莉莉
山西建筑 2021年9期
胥 莉 莉
(中铁第一勘察设计院集团有限公司,陕西 西安 710043)
1 概述
数字正射影像(digital orthophoto)是将地表的航空航天影像经垂直投影后生成的影像数据集,参照地形图要求按图幅进行裁切、配以图廓整饰得到数字正射影像图(Digital Orthophoto Map,简称DOM)。DOM兼具像片的影像特征和地图的几何精度,具有良好的可判读性和可量测性,可从中直接提取自然地理和社会经济信息。DOM是测绘领域遥感应用的基础,也是国家基础地理信息数字成果的主要部分,其质量的好坏直接关系到遥感应用结果的准确性。平面位置中误差是基础地理信息数字测绘成果质量子元素的必检内容[1]。作为DOM质量评价的重要指标,影像平面位置中误差通常可通过野外实地检测法和高精度资料检核法进行计算,而不论何种方式,最终都是利用同名点的坐标较差来计算点位中误差,这就要求影像坐标和检测坐标属于同一个坐标系。
目前,野外实地检测法一般采用GNSS(全球卫星导航定位系统)RTK(载波相位实时差分)方法,测得成果的坐标系为WGS84,而DOM则多为地方坐标系。高精度资料检核法则多采用大一级比例尺的线划图,此时同样可能存在坐标系不一致的情况,由于坐标转换参数属于保密数据,一般用户通常难以获取。如欲联测已知点自行求解参数,则无形中加重了外业工作。本文探讨一种新的方法,以便能快速可靠地评定DOM的精度。
2 基本规定
根据相关规定[2],数字正射影像的平面位置中误差不应大于表1规定,明显地物点平面位置中误差的两倍为其最大误差。
为了计算平面位置中误差,主要检查方法有:1)参考数据对比;2)野外实测;3)内部检查[3]。通常是先根据图上成像情况抽取一些明显地物点,量取其像点坐标;然后通过对同名点进行实地测量,或从高精度线划图上量取得到参考坐标。整幅图的点位中误差计算公式如式(1)所示[4,5]:
(1)
其中,(xi,yi)为某点的DOM像点坐标;(Xi,Yi)为对应的参考坐标;n为点个数。

表1 数字正射影像平面位置中误差限差
3 本文算法
3.1 坐标转换法
当DOM像点坐标和参考坐标不一致时,可以通过公共点求取坐标转换参数。该方法分为三步。
第一步,对明显地物点进行分类,一类作为求取坐标转换参数的公共点,余下的作为检测点。公共点应满足以下条件:1)分布较为均匀且能覆盖整个测区;2)图上特征明显,易于实地辨识;3)参考坐标精度有保障,如外业观测环境好等。
第二步,根据2个以上公共点求解四参数。坐标转换的函数模型为[6]:
(2)

将式(2)线性化后,利用最小二乘法[7],求解出四参数。
第三步,将检测点的DOM像点坐标利用第二步求出的四参数转换至参考坐标系,与对应的实测参考坐标按式(1)计算点位中误差。
本法的优点在于所谓的公共点可由用户自行选取,免却了联测实际地面已知控制点的麻烦;缺点在于若公共点中含有系统偏差或粗差,则会污染四参数,将影响传递给检测点。
3.2 距离较差法
设有两点A和B,根据两点间距离公式:
(3)
其中,x,y为平面坐标。求全微分可得:
(4)
根据误差传播公式[7],可得:
(5)
设两点在x和y方向的中误差均相等,即:
mxA=myA=mxB=myB=m。
则有:
(6)
又根据点位误差公式:
(7)
可见用坐标计算的两点间距离的中误差应与单个点的点位中误差相等,如能求出DOM的点间距离中误差mD图,也就得到了DOM的点位中误差mp。设明显地物点在用像点坐标计算的距离为D图,用参考坐标计算的距离为D参考,令ΔD=D参考-D图,根据误差传播定律可推得:
(8)
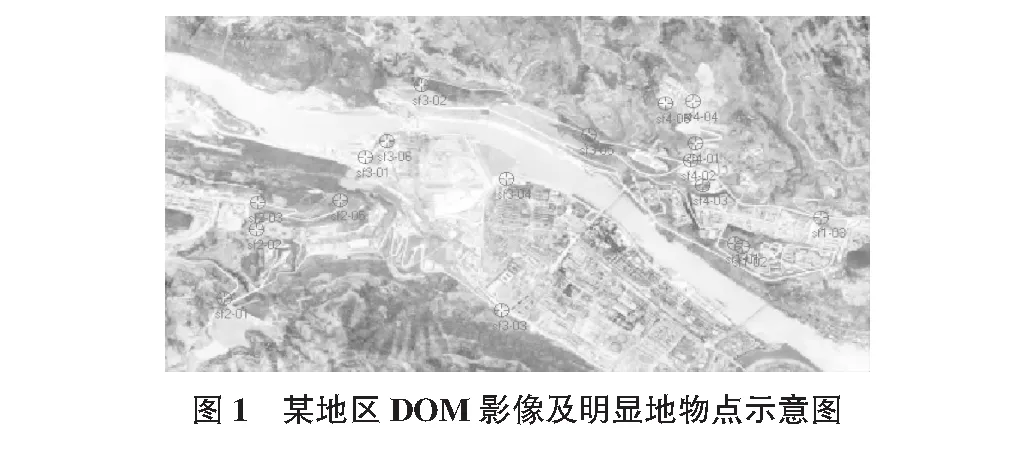
由于参考点坐标的精度至少应满足mp参考 (9) mΔD可根据各边较差ΔDi通过下式求得: (10) 其中,k=n(n-1)/2,k为边的个数,n为点的个数。 同时可得单条边的边长较差ΔD的限差为: mΔD限=2mΔD (11) 本法的优点在于,无需进行坐标转换,不会引入坐标转换偏差。 任意多边形均可以分解为若干个三角形。因此,以A,B,C三个点形成的三角形为研究对象,其面积计算公式为[8]: S=[yA(xB-xC)+yB(xC-xA)+yC(xA-xB)]/2 (12) 假设各点在x和y方向的中误差均相等,且点位中误差记为mp,则对式(12)全微分并由误差传播公式,可得三角形面积S的中误差为: (13) 设面积较差ΔS=S参考-S图,根据误差传播公式并经变换可得到下述关系式: (14) 将一幅图中所有明显地物点生成三角网,则mΔS可根据各三角形较差ΔSi按下式求得: (15) 其限差为: ΔS限=2mΔS (16) 也即图上面积与实测面积的较差不应超过该中误差的两倍。 而DOM的点位中误差可由下式计算: (17) 图1为某地的一幅1∶5 000的DOM,共选测了19个明显地物点作为检测点,图上坐标采用ERDAS IMAGINE软件测量获取;外业采用GPS RTK方法进行了测量,测量时进行两次初始化,每次测量时间120 s以上,两次测量坐标较差小于5 cm时取均值作为最终结果。采用本文的方法,进行了坐标、两点间距离和三角形面积的比较。 坐标比较法:利用sf1-02,sf2-01,sf3-02,sf3-03,sf4-04 5个点求定坐标转换参数,将其余14个点的DOM坐标转换到WGS84坐标系,按照式(1)计算点位中误差。并对各点转换后的坐标与实测坐标的差值进行了检验,14个点的点位偏差均小于两倍中误差(7.5 m)。 距离比较法:对所有点进行两两间距离的计算,共计171条边,根据式(9)计算“图上距离”的中误差mD图,继而根据式(7)得到点位中误差mp。并对各条边的较差进行了检验,发现其中:最小偏差为0.014 m,最大偏差4.6 m;相对误差最小为0.01%,最大为0.29%。图测距离与实测距离的偏差,超过两倍中误差(7.5 m)的有2个。 三角形面积较差法:基于Delaunay法生成三角网,共计三角形28个,三角形构成如图2所示。根据式(14),式(15)得到面积中误差mS图,最后按照式(17)计算点位中误差mp。各个三角形的面积较差(图测面积—实测面积)中,相对误差最小为0.13%,最大为0.64%,总体面积(全部三角形相加)的相对误差为0.31%。 三种方法计算的点位中误差列于表2。从结果可以看出,三种算法的结果有一定的差异,但总体上还是较为吻合。差异可能是由于测量的误差,以及线性化误差等造成。且距离较差法和面积较差法更为接近,说明二者的可靠性更高。 表2 三种方法计算的点位中误差 m 本文提出了采用坐标转换法、距离较差法和三角形面积较差法计算DOM点位中误差的方案,可同时适用于高精度已知资料检核和野外实测法。三种方法计算的点位中误差应保持一致。如有较大差距,说明含有系统误差甚至粗差,需要仔细甄别并进行相应处理。3.3 三角形面积较差法
4 实例验证


5 结语
猜你喜欢
现代苏州(2022年9期)2022-05-26 01:34:49
文萃报·周五版(2022年9期)2022-03-11 00:24:12
装备制造技术(2021年4期)2021-08-05 07:40:24
制造技术与机床(2018年12期)2018-12-23 02:41:18
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
计算机测量与控制(2017年6期)2017-07-01 16:23:28
测绘科学与工程(2016年4期)2016-04-17 06:51:08
遥感信息(2015年3期)2015-12-13 07:26:50
中国交通信息化(2015年12期)2015-06-06 06:53:33
电测与仪表(2015年22期)2015-04-09 11:42:14