触觉振动反馈系统对单侧小腿假肢穿戴者平衡及行走功能的影响
2021-04-25 01:56:24王世琦高雅倩胥泽华林恒胥方元袁丽
中国康复理论与实践 2021年4期
王世琦,高雅倩,胥泽华,林恒,胥方元,袁丽
1.西南医科大学附属医院康复医学科,四川泸州市 646000;2.西南医科大学康复医学系,四川泸州市 646000
截肢手术恢复后,需尽早应用假肢,并进行心理治疗、功能锻炼等,以达到早期康复的目的[1-2]。然而,在佩戴传统假肢后,截肢者的平衡和行走功能与正常人仍有差距[3-4]。错误的平衡及步态特征不仅影响运动模式的美观性,还会影响残肢舒适性,降低行走效率[5]。随时间推移,错误的姿势可能会对截肢者身体造成二次伤害[6]。因此,平衡和行走功能的改善对小腿假肢穿戴者具有重要意义。
反馈治疗是康复医学领域的研究热点[7-8],平衡和行走功能与人体的感觉息息相关[9]。小腿截肢后,会出现反馈和运动匹配缺失,因此建立必要的反馈尤为重要[10]。对假肢穿戴者进行功能性反馈训练,能够有效缩短康复训练周期,改善截肢者运动功能[11]。然而,目前国内尚无触觉振动反馈应用于小腿假肢的文献记载,国际上此类研究报道也相对较少,有待开展大量临床研究对其有效性提供证据支持。
本研究将本科自行研制的触觉振动反馈系统应用于临床,提供传统假肢不具备的对下肢运动信息正确、全面的感知和反馈,为改善截肢患者生活质量、提高截肢患者运动功能提供新方法。
1 资料与方法
1.1 一般资料
2019 年10 月至2020 年11 月,在西南医科大学附属医院康复医学科门诊和住院部招募小腿截肢后穿戴假肢者11例。
纳入标准:①因各种外伤或血管病等所致单侧小腿截肢;②年龄20~70 岁,佩戴假肢时间超过半年;③装配假肢后具有独立行走能力;④残端无神经瘤、幻肢痛、水肿、压疮等影响行走的并发症;⑤患者及家属同意,并签署知情同意书。
排除标准:①残端存在严重感觉障碍;②并发认知功能障碍、严重心肺及神经、肌肉骨骼系统疾病或其他影响其生存的严重疾病等。
受试者的年龄、性别、体质量指数(body mass index,BMI)等基本资料见表1。
本研究获西南医科大学附属医院伦理委员会批准(No.KY2019160)。
1.2 方法
1.2.1 装置组成
装置由1 个控制主板(STMicroelectronics 公司,CPU型号:STM32F103RET6,大小6.5×3.4 cm,质量10 g)、5 个陀螺加速度仪传感器(InvenSense 公司,芯片型号:MPU6050,大小2.5×1 cm,质量1 g)和4 个振动马达(深圳海润微电子公司,型号TY1910,特别研制,大小1.9×1.3 cm,质量1.5 g)组成(图1A)。传感器分别位于左右大腿和小腿,以及假肢足背(图1B)。4 个振动马达则位于假肢侧大腿前、后、内、外四个位置(图1Ba)。
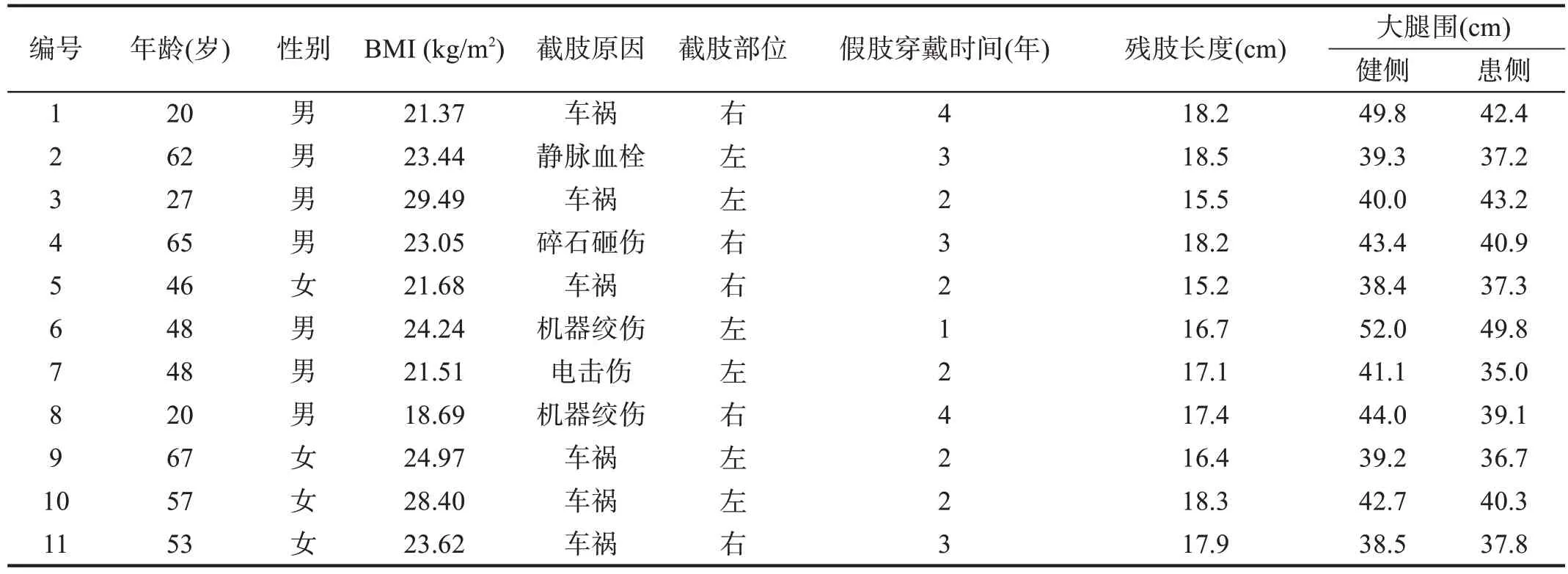
表1 受试者基本情况

图1 装置组成及安装方式
1.2.2 装置原理
每间隔5 s,陀螺仪传感器采集双侧大腿、小腿以及假肢侧假脚在三维空间中的角度(双侧大腿前屈、后伸、内收、外展角度,双侧小腿前屈、后伸角度,假脚平面内外翻转角度),并传入中央处理器;“判断模块”程序对大腿和小腿的数据进行双侧实时对比,假肢侧脚平面数据与系统预设数据进行对比。当误差大于5°,振动马达刺激相应的部位。
具体振动频率代表意义如下。①大腿姿势调整:在矢状面上,当假肢侧运动幅度过大,则控制主板指挥振动马达单次刺激大腿前侧;动作幅度过小,则单次刺激大腿后侧。在冠状面上,该系统以同样的方式刺激大腿内外侧以调整大腿角度。②小腿姿势调整:小腿前屈、后伸角度出现差异时,在矢状面上通过振动马达连续两次刺激大腿相应部位进行调整,前屈过多则连续振动前方,后伸过多则连续振动后方。③假脚平面姿势调整:假脚平面内外翻角度出现异常时,则通过大腿内外侧马达连续两次振动提示,内翻异常振动内侧,外翻异常振动外侧。当患者大小腿、假脚多部位姿势均存在问题时,内置程序优先调整大腿姿势,再依次调整小腿、假脚姿势。
通过以上方式提醒截肢者根据马达的振动部位及时进行姿态调节,最终达到改善平衡与步行功能的目标。
1.2.3 调试及使用
由2 名经过专业假肢制作培训,并且有6 年以上工作经验的假肢制作师相互配合,为受试患者佩戴触觉振动反馈系统。根据临床医师、假肢制作师的专业知识,患者反馈以及制造商说明书进行调整,并指导患者使用。患者佩戴该装置进行日常活动3 h,期间出现任何情况,及时咨询研究人员。
1.3 评定方法
1.3.1 Tinetti 平衡与步态量表(performance oriented mobility assessment,POMA)[12]
POMA 包括平衡和步态测试两个部分,综合评定患者静态、动态平衡功能。平衡评定16分,步态测试12分,共计28分。<24分提示平衡功能障碍,<15分提示有跌倒风险。
1.3.2 步态分析
采用GAITRite®步态分析系统[13](GAITRite Gold,CIR Systems,PA,USA)。受试者以舒适的速度行走,记录行走速度、步长、步长时间、单支撑相、双支撑相和摆动相等。受试者从步道起点前2 m 开始行走,以确保加速和减速的过程不被仪器记录。
1.3.3 室外1000 m复杂路面行走测试[4]
以本院部分道路为试验场地,包括平路、草坪、坡道和楼梯。利用3D 计步器记录步数、耗能,利用秒表记录耗时。
以上评定均在装置佩戴前及佩戴活动3 h 后进行,由同一名不参与患者招募及配件安装的专业治疗师进行。
1.4 统计学分析
采用SPSS 25.0 软件分析数据。计量资料符合正态分布,以()表示,采用配对t检验;不符合正态分布以M(Qu,Ql)表示,采用Wilcoxon检验。显著性水平α=0.05。
2 结果
2.1 POMA评分
与穿戴前相比,受试者POMA 的平衡评分升高(P<0.05),步态评分和总分显著升高(P<0.001)。见表2。

表2 触觉振动反馈系统穿戴前后POMA评分比较(n=11)
2.2 步态分析
与穿戴前相比,受试者患侧肢体步长改善,双侧肢体步长时间和双支撑相时间缩短,行走速度提高(P<0.05)。见表3。
2.3 室外1000 m复杂路面行走测试
与穿戴前相比,受试者步数、耗能和用时均降低(P<0.05)。见表4。
2.4 不良事件
所有受试者均完成本次测试,在佩戴该装置进行日常活动过程中未出现不适。
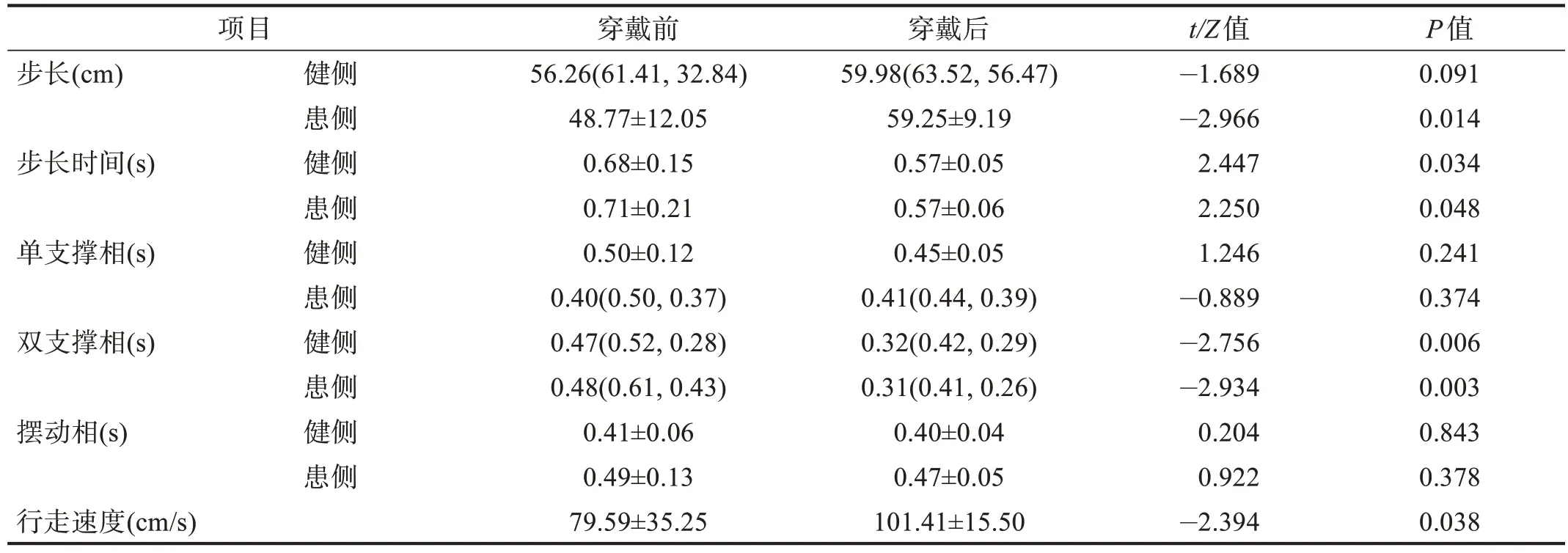
表3 触觉振动反馈系统穿戴前后步态数据比较(n=11)

表4 触觉振动反馈系统穿戴前后室外1000 m复杂路面行走测试结果比较(n=11)
3 讨论
小腿截肢者通常穿戴假肢以促进自身部分运动功能恢复并完成日常活动[14]。而大部分假肢不具备对下肢运动信息正确、全面的感知和反馈功能,不能有效弥补失去肢体所致的感觉缺失[8]。虽然一些感觉反馈确实能够通过假肢接受腔和肢体残端的相互运动来实现,但小腿截肢者必须依靠视觉和听觉等交替感觉来完成安全且有效的行走[15]。
来自下肢的感觉反馈不仅是保持身体平衡、完成行走的必要条件,也是执行复杂日常活动(上下楼梯、爬坡等)的必备条件[16]。感觉输入的减少一定程度导致截肢人群异常且低效的步态,增加因失去平衡而跌倒的风险[17]。假肢穿戴者对摔倒的恐惧导致其社会参与度下降[18-19]。为降低日常活动中的跌倒风险,改善小腿假肢穿戴者运动功能,替代截肢患者失去的本体感觉,提供有效的触觉振动反馈显得极其重要[20]。
振动反馈已被证明对诸多疾病所致的动静态平衡功能异常具有改善作用。前庭神经损伤患者应用躯干振动可以减少角支撑面扰动,改善姿态稳定性[21]。Sienko 等[22]对8 例前庭神经损伤患者佩戴多轴振动反馈装置进行干预,发现对姿势稳定性具有积极作用。金振华等[23]的随机对照研究显示,全身振动训练能进一步改善脑卒中患者下肢负重、平衡和步行功能。Duclos 等[24]对截肢者不同部位肌肉予以振动,能有效改善截肢者的错误姿势。
本研究所使用的触觉振动反馈系统,为本院康复医学科自主研发,委托第三方机构生产。该装置曾初步应用于一例小腿截肢者,成功改善其运动功能[25]。该装置使用一个脚平面传感器,判断截肢者是否在进行转弯。在转弯时,正常人下肢也做不到两个肢体动作完全协调[26]。所以,为了避免错误指令,当检测到截肢者在转弯时,振动马达将暂时不会对截肢者进行刺激,待截肢者完成转弯动作后,振动马达将继续工作。而当截肢者的脚平面因步态异常出现内、外翻时,传感器可检测到假肢异常,振动马达将刺激截肢者相应部位,提醒其脚平面的姿势问题。该设计避免了系统出现误判,保证反馈的准确建立。
振动马达数量、安放部位的选择,本研究团队也有考虑。首先,振动马达数量已达4 个,通过对振动频率、强度的调整,已经可以完成在矢状面、冠状面对姿势的调整,更多的振动马达可能会影响装置的便携性以及截肢者可接受度。其次,理论上振动反馈点可以在身体的任何部位,但考虑到该装置主要是为解决患者平衡及步态问题,而该问题主要由截肢所引起,需要假肢侧进行及时调整,因此假肢侧便成为最优选择。最后,选择大腿作为主要振动马达的安放部位,我们的考虑如下:①截肢后残端感觉可能出现减退,残端肌肉萎缩可能进一步加重感觉减退[27];②截肢者所穿戴的假肢材料不定,对振动的传导效果难以保证[2];③小腿截肢者截肢侧大腿保留完整,放置于大腿更能保证振动的及时感应,促进反馈建立。
本研究对11 例小腿截肢后假肢穿戴者进行干预,干预过程中受试者未出现任何不适,表明本触觉振动反馈系统可安全、有效地改善小腿假肢穿戴者平衡及行走功能。Husman 等[20]曾发明一种可穿戴的皮肤拉伸触觉反馈装置,在静态条件下对健康受试者进行初步的感知测试后发现,受试者对该装置所传递的刺激具有良好的感知能力,可用于改善下肢截肢者的平衡控制。但是该装置只对正常人群进行测试,并未在截肢者身上进行试验。
Fan 等[28]曾发明一种触觉反馈装置,通过安装在脚4个关键接触点上的压阻式力传感器收集相关信息,传递给系统控制器,驱动四个相应的气动控制气球执行器达到反馈目的。在对6 例健康受试者进行测试后发现,该气动触觉反馈系统设计是一种可行的下肢感觉反馈方法。随后,他们在1例截肢者身上进行测试,也取得积极效果[29]。虽然该装置构造、机制与本科室自研装置有所不同,但其结论与本研究一致,即通过外部辅助装置为下肢建立良好的反馈,能够有效改善截肢者运动功能。
此外,上述两种反馈装置均未对正常肢体的数据进行实时监测,无法完成双下肢数据的即时对比。同时,仅有皮肤的牵张力或压力信息,也无法全面提供患者截肢端完整的本体感觉。本研究中,受试者根据大腿处不同部位的振动反馈来调整自己的假肢侧运动,属于定性调整,各受试者之间差异(除假脚平面外)通过双侧即时对比尽量消除。假肢侧脚平面的预设数据通过采集正常人行走时脚平面相关参数进行设置,尽可能消除受试者之间的个体差异。
本研究尚存在一定局限性。第一,装置的佩戴是用粘扣带绑于患者相应部位,穿戴过程较为繁琐,未来将对该装置进行穿戴一体化设计,实现便携式穿戴。第二,该装置仅适用于单侧小腿截肢患者,今后将考虑对装置进一步改进,以扩大其适用范围。第三,整个试验样本量偏少,未采用高证据性的随机对照研究作为试验设计,且干预时间和随访周期也较短。未来将开展大样本随机对照试验,观察触觉振动反馈系统对小腿假肢穿戴者的平衡和行走功能的远期影响。
利益冲突声明:所有作者声明不存在利益冲突。
猜你喜欢
疯狂英语·新读写(2022年5期)2022-11-22 12:28:26
海外星云(2021年6期)2021-10-14 07:20:42
中外文摘(2020年19期)2020-10-31 12:51:08
家庭医学(下半月)(2020年7期)2020-08-24 07:46:54
中国生殖健康(2019年3期)2019-02-01 06:12:34
意林·全彩Color(2018年7期)2018-08-13 09:35:14
特别健康(2018年3期)2018-07-04 00:40:20
工业设计(2016年4期)2016-05-04 04:00:20
爆笑show(2015年4期)2015-06-24 07:35:57
中国康复理论与实践(2015年7期)2015-05-09 08:31:38