
一种轮椅爬楼梯辅助装置的设计
2021-04-25 06:15:46王燕燕徐西凡王长乾张港港
陕西理工大学学报(自然科学版) 2021年2期
王燕燕, 徐西凡, 王长乾, 吴 晗, 张港港
(陕西理工大学 机械工程学院,陕西 汉中 723000)
当前我国人口的老龄化趋势不断上升,同时也存在部分因疾病和受伤造成的下肢损伤的人群,对于这些人的出行,轮椅是重要的辅助行动工具[1-2]。电动轮椅的出现代替了传统的手动轮椅成为行动不便人群的主要辅助行动工具,这虽然很大程度上解决了轮椅动力的问题,但是传统的轮椅只能实现平地行驶,遇到较差路况或有台阶时很难使用,同时国内的住宅还存在许多没有电梯的老式、复式楼房,因此这些人群上下楼成为了一个较为棘手的问题。
国外相对于国内的房屋建筑个性化更为突出,轮椅上下楼梯技术的研究应用更加广泛。目前国内市场上已有多种适用于各种楼梯的爬楼轮椅,常见的有3种辅助爬楼轮椅:履带式、星轮式和腿式[3],但都存在一定的缺点。履带式爬楼轮椅由于重量大、体积大,在平地上行走对能量消耗较大,所以续航能力弱;星轮式爬楼轮椅体积小巧、动作灵活,但没有防滑制动装置,存在一定的安全隐患,且工作时振动较大,无法用于平地行驶;腿式爬楼轮椅上下楼梯和平地运动相对于前两种轮椅都有较大的优势,但难点在于控制开发难度较高,技术较难掌握,因此价格昂贵,不适用于我国大面积市场[4-5]。在不影响平地轮椅行走续航的基础上,为解决爬楼轮椅振动大、整体装置笨重的问题,本文设计出一种轮椅爬楼梯的辅助装置,可以平稳上楼,平地正常行走。
1 方案设计
考虑到要解决智能辅助爬楼轮椅的平地行驶续航能力和降低整体重量问题,本文基于绿色环保和创新设计思想,轮椅主体仍采用普通电动轮椅,辅助装置结构简单,操作简便,便携可收纳,只有在爬楼的时候展开,平地行驶时处于收纳状态,同时振动小和噪音低。
1.1 设计要求
轮椅爬楼辅助装置的工作环境主要为复式及无电梯的多层小楼,其工作路面为国家标准楼梯。根据国家标准轮椅指标[6]与国家楼梯标准[7],确定装置主要技术指标:(1)以轮椅重心为测量基准点,载重范围在100~135 kg之间;(2)舒适爬楼角度为23°~45°;(3)可方便拆卸,平地运行时该机构处于收纳状态;(4)爬楼过程中平稳、振动小、噪音小;(5)设计中有安全保护,轮椅安全平稳,灵活爬楼;(6)对楼梯及墙壁无损伤。
1.2 结构设计
当前上下楼轮椅主要利用楼梯台阶,在长期使用过程中对楼梯有较大的损伤,爬楼过程的平稳性也有待于提升。本装置为满足运动平稳的要求,设计了多个模块协同工作(见表1),实现连续爬楼过程。
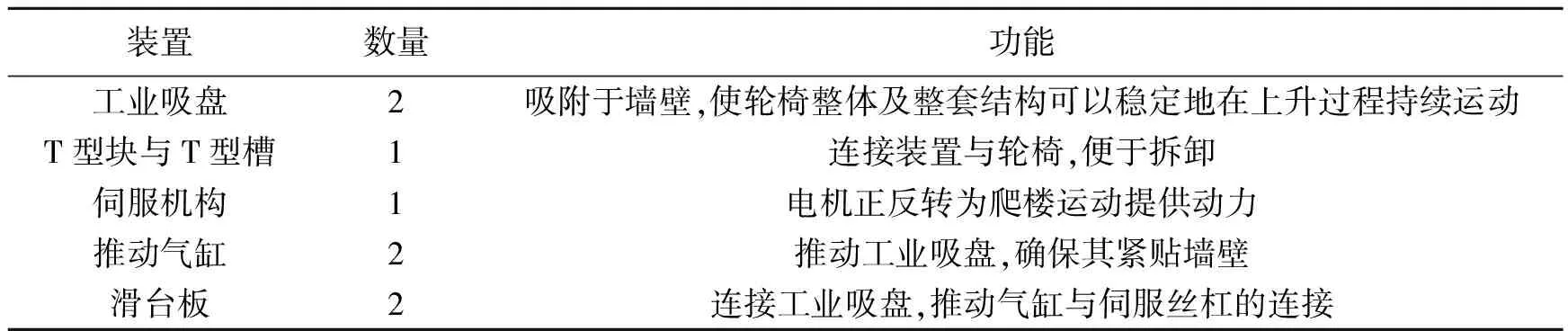
表1 机械结构功能模块表
该装置在使用过程中利用楼梯侧墙壁作为施力作用面,采用真空吸盘吸附于墙壁并通过辅助结构交替施力实现轮椅的爬楼运动[8],所以对墙壁的光洁度有一定的要求。因此吸盘的材料选用丁腈橡胶,能实现其与木板和光洁墙面之间具有较强的吸附力。机构与轮椅的连接采用T型槽结构。整个装置的动力设计采用可程控的伺服电机为动力源[9-10],通过联轴器、丝杠将电机的转动转化为直线运动,为轮椅提供爬楼动力。最后通过滑台板将运动传递给工业吸盘。
步进式辅助轮椅爬楼装置部分机械结构如图1所示。
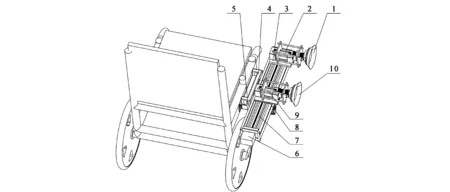
1.工业吸盘A;2.推动气缸A;3.滑台板A;4.T型槽;5.T型块;6.伺服机构;7.伺服机构;8.滑台板B;9.推动气缸B;10.工业吸盘B
将T型块(5)焊接在轮椅扶手右侧,T型块与T型槽(4)相配合,伺服机构(6)与T型槽连接。伺服机构的两个滑台板A和B(3和8)上分别固定有推动气缸A和B(2和9),其中推动气缸A与滑台板A固定在伺服机构顶端,两个推动气缸连接两个工业吸盘A和B(1和10),为保持平衡稳定将机构的中心与轮椅的中心位置重合。
1.3 部件选型设计
根据爬楼装置的运动设计方案,机构以伺服电机为驱动部件,工业吸盘为支撑整个工作装置的重要部件。吸盘工作中采用真空吸附,工作时紧贴并吸附于墙壁。整体参数的设计受最大载重重量、吸盘吸吊力、墙面材料、吸盘真空度等影响。由于吸附对象是光滑整洁的墙面,无通气性,不易变形,因此吸盘材料选用丁腈橡胶。截面形状为圆形时,所需吸盘直径
(1)
式中M为吸附物的重量,考虑整套装置的负载,给定初始值35 kg;δ为安全系数,由于吸附物的起吊方向是垂直起吊,取8;n为吸盘个数,如图1所示为2个吸盘,但是工作时只有一个吸盘进行动作,因此n为1;工作时P为真空压力,选取值-70 kPa。由于真空吸盘在吸附时会变形,吸盘的外径将增加10%左右,因此查吸盘直径表选取直径D=220 mm的工业吸盘。
吸盘安装时为垂直安装,真空压力的吸吊力F与真空压力P,吸盘与吸附物在墙面的摩擦力μ,吸盘面积S等因素相关,所需吸吊力为
F=μ×P×S×0.1,
(2)
实际爬楼中,轮椅自重与负载给定了初始值,吸吊力已经根据计算得知,为了保证能够完成吸附-爬楼任务,实际中要有一定的安全系数,一般取2.5。当大于等于2.5时,才能完成指定动作。经验证,满足实际工况需求。
1.4 工作过程
初始状态,工业吸盘A和B位于伺服机构两端,推动气缸A和B。空压机工作工业吸盘A和B吸附墙壁,电机正转,工业吸盘B收缩,向工业吸盘A方向移动,移动至吸盘B处停止,电机停止转动,推动气缸A推动吸盘B再次紧贴于墙面上并吸附,吸盘A停止进气断开与墙面的连接,电机继续正转,吸盘A与伺服系统同时向前移动,移动到伺服系统极限位置,吸盘A吸附墙面,周期性往复,实现轮椅的爬楼过程。工作过程示意图如图2所示。

图2 工作过程示意图
2 爬楼梯辅助装置仿真分析
2.1 模型建立
为验证结构设计的正确性,利用Solidworks建立三维参数化模型,并导入动力学分析软件ADAMS中,得到该装置的虚拟样机模型,如图3所示。驱动装置为吸盘及滑台板,前者驱动力方向垂直于墙壁方向,后者与墙壁方向平行。建立运动约束构件间的运动关系,添加约束与所需运动。各部件约束关系见表2。
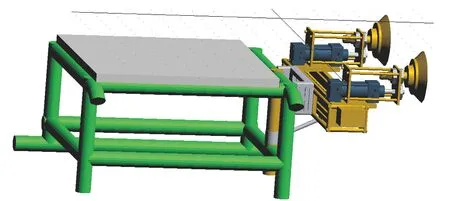
图3 虚拟样机模型
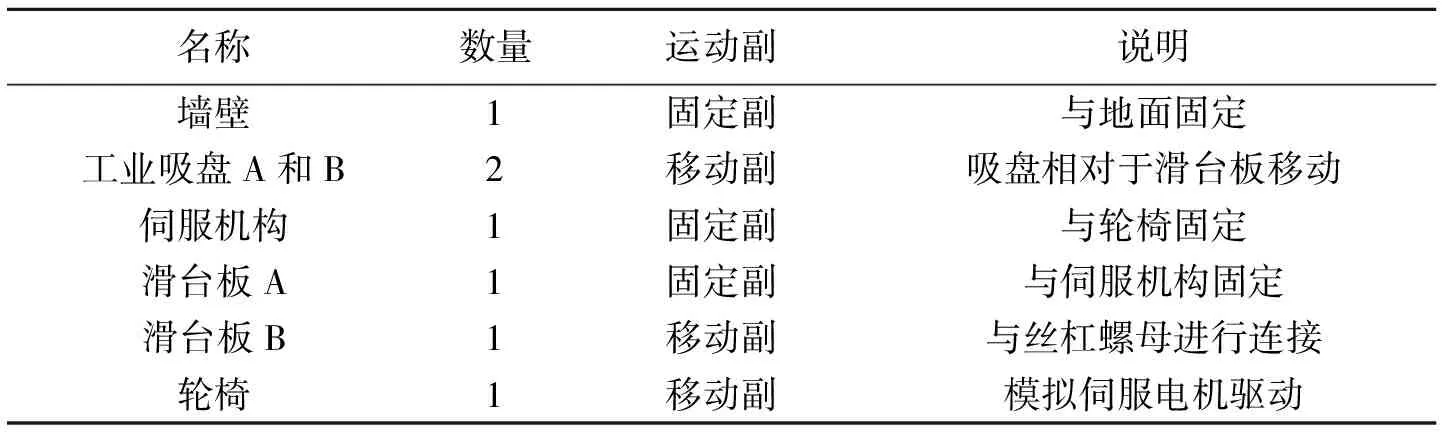
表2 虚拟样机约束关系表
工业吸盘A和B起始位置均为伺服机构两端极限位置。利用Step函数,进行运动控制,运行时间为12 s,4000步进行仿真,对虚拟样机模型进行仿真运动学分析并得到结果。
2.2 仿真结果及分析
爬楼梯运动仿真是为了分析此装置在辅助轮椅爬楼过程中是否能安全平稳,对上楼轮椅进行合成速度分析是为了检验轮椅在其运动过程中是否会有冲击以及较大加速度。图4所示为爬楼过程中轮椅重心运动轨迹曲线图,图5所示为爬楼过程中轮椅重心合速度曲线图。
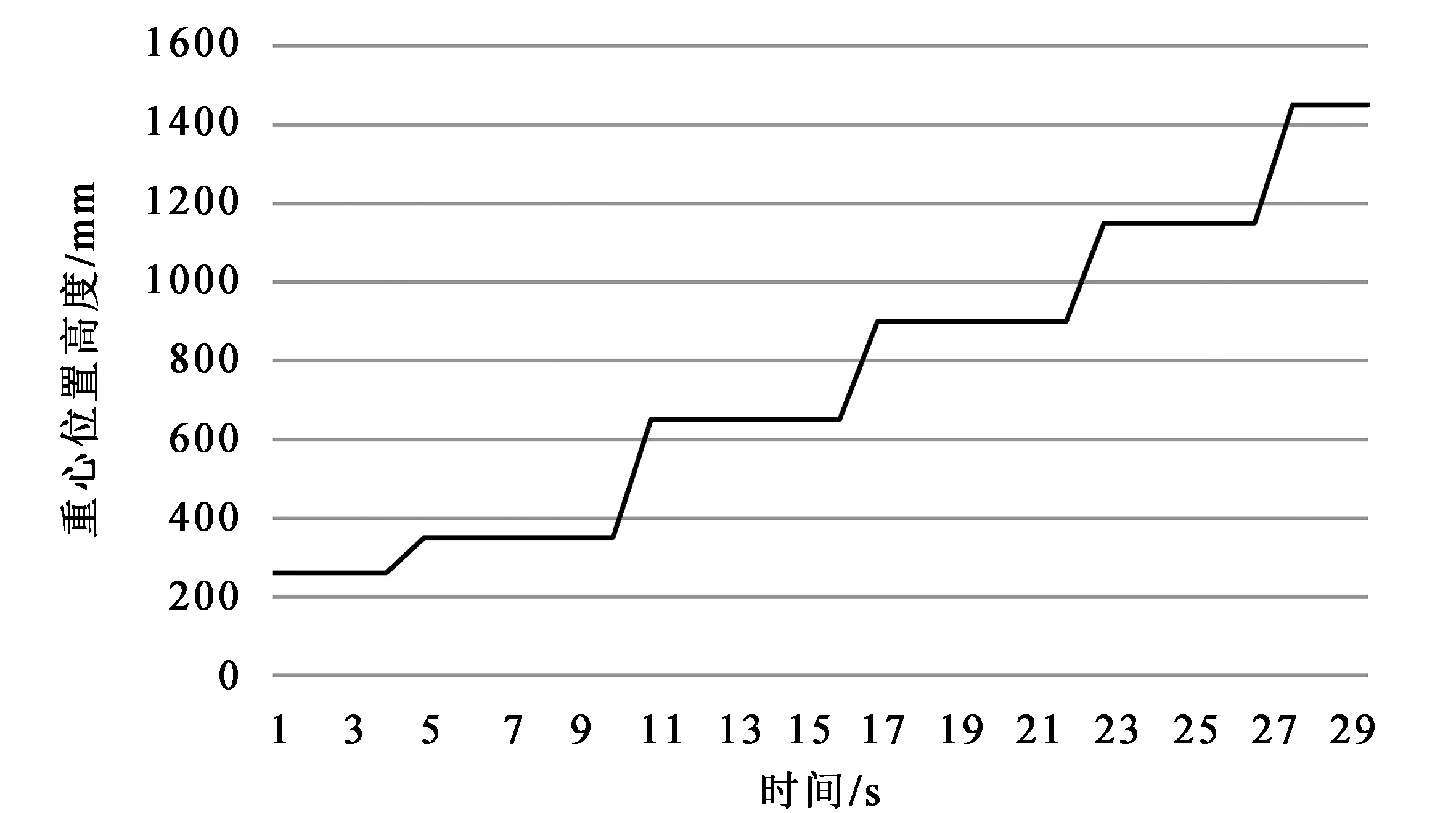
图4 轮椅重心运动轨迹图

图5 轮椅重心合速度图
从图4中可以看出,单步轮椅距离大约为120 cm,位移值达到预期值,并且整个运行曲线平缓,呈周期性变化。在整个运动过程中,没有突变现象,表明其上楼时重心没有发生较大的变化,根据曲线趋势,其角度符合舒适爬楼角度。
从图5中可以看出,曲线呈周期性变化,每个周期会出现一次峰值,最大速度值为450 mm/s,这是由于上楼过程中轮椅通过辅助装置上升时,速度会出现由小到大再到小的变化。图5中爬升速度的周期变化说明轮椅运动过程没有较大的冲击力,且具有平稳性,有效保证了乘坐者的安全。
3 结束语
本文基于创新思想设计轮椅爬楼辅助装置,此款轮椅辅助装置采用电控、气动相结合,实现轮椅自动爬楼,提高了轮椅上楼的效率,保障了人在上楼过程中的安全性。该设计结构简单,操作简便,体积较小且质量较轻,对楼梯无损伤。所使用的零件是市面上现有的且技术成熟的产品,价格低廉,易于推广,可为后续市场应用奠定基础。
猜你喜欢
祝您健康(2024年3期)2024-03-03 13:27:39
机械设计与制造(2020年9期)2020-09-15 01:32:44
装备制造技术(2019年12期)2019-12-25 03:07:02
飞控与探测(2019年4期)2019-09-09 09:24:54
机械设计与制造(2018年2期)2018-03-05 12:33:02
青岛画报(2018年1期)2018-02-23 12:07:50
方圆(2017年24期)2018-01-17 20:55:33
福建轻纺(2016年8期)2016-10-16 01:08:17
制导与引信(2016年3期)2016-03-20 16:02:02
设备管理与维修(2015年2期)2015-12-25 01:49:36
