一种仿生波动鳍装置设计与实验研究
2021-04-25 06:20吴梦妍
海洋技术学报 2021年1期
吴梦妍,张 瑶
(1.中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院机器人与智能制造创新研究院,辽宁 沈阳 110169;3.中国科学院大学,北京 100049)
自主水下航行器(Autonomous Underwater Vehicle,AUV)在海洋开发、科学研究以及海洋安全等领域拥有广阔的应用前景,近些年得到迅速发展,各型产品纷纷投入使用。推进系统作为海洋机器人的重要组成部分,其提供的推力、效率及尺寸等因素对AUV的设计与使用产生较大的影响。传统的AUV推进装置包括:螺旋桨推进器、喷水推进器以及磁流体推进装置等[1]。螺旋桨推进器依靠螺旋桨产生的推力为航行器提供动力,它是最简单、最常用的推进装置,大多数的AUV均采用螺旋桨作为主推进器,其特点是推进效率高,但其在低速情况下存在着效率低,机动性不足的问题,并且还伴随着噪音和水流扰动。喷水推进器通过向航行器运动相反的方向喷射加速后的水流,使船体受到水流的反作用力而产生推力[2],具有附体阻力小、操纵性好的特点,但其机械传动机构复杂,体积庞大且低速情况下推进效率低于螺旋桨推进器。磁流体推进器是利用局部空间内海水中电流与磁场间的相互作用力,使海水运动而产生推进力。虽然磁流体推进装置是直接将电磁能转换为水能,大大降低了机械噪音,但磁流体推进器的使用需要大型发电机,这就极大限制了其在AUV特别是小型AUV平台上的应用。近些年来,模仿海洋生物的仿生推进系统以其独有的特点获得了极高的关注度,其中鱼类游动所展示出的高效性和快速性以及机动能力远高于传统螺旋桨推进器,还能够安静地融入水环境中。因此对模仿鱼类的推进方式的研究具有良好的应用前景[3]。
鱼类的推进方式根据游动时产生推进力部位的不同,主要分为两种:身体尾鳍摆动(Bodycaudal Fin,BCF)推进方式,典型代表为鲹科鱼类;中鳍/对鳍(Median and/or Paired Fin,MPF)推进方式,典型代表为鳐科鱼类。BCF推进方式因为其高速性而受到了广泛的关注,而对MPF推进方式的研究则相对较少。MPF推进方式的特点是具有较强的机动能力以及稳定性,不仅能够在复杂水下环境自由穿梭,并且其自身姿态基本不发生改变,非常适用于需要保持平台稳定的航行器使用,因此近年来逐渐受到研究人员的重视。目前,国内外已有相关的研究机构利用不同的机械结构研制了模仿MPF推进方式的仿生波动鳍推进装置,但其推进效率和游动性能与真实鱼类相比还有很大差距,这也限制了仿生波动鳍推进系统的应用。1999年,Rosenberger L J等[4]通过记录了3只蓝点黄貂鱼的肌电图数据来研究鳍的运动模式,以及这些模式如何随着游动速度的变化而变化。2002年,Toda Y等[5]建立了波动鳍模型并进行了自由航行实验与水动力测试,实验结果表明随着波频与波长的增加,机器人的游速变快。接着有许多的研究对波动鳍的运动参数的影响做了水动力分析和实验。2009年,国防科技大学对波动鳍的鳍面形状、包络线以及运动参数对于游速、推力、能耗和效率的影响做了实验[6]。2015年,Sfakiotakis M等[7]对波动鳍的波动参数对游速,能耗和效率的影响做了详细的参数研究,并开发出了基于波动鳍的水下航行器。现有的对于仿生波动鳍的研究大多仅涉及波动鳍运动参数或运动模式对于仿生波动鳍推进力或推进速度的影响,较少讨论波动鳍的鳍面结构和组成波动鳍的鳍条材质以及鳍面松紧度等对于仿生波动鳍推进力的影响。而这些因素在设计环节中尤为重要,将会决定仿生波动鳍推进装置的推进性能。
本文以鳐鱼的推进机理作为研究对象,设计了一套仿生波动鳍推进系统及小型水槽实验装置,在分析频率、相位、幅度等因素对推力影响的基础上[8],本文主要就物理因素对推力的影响进行分析。研究结果显示,物理因素诸如鳍条材质、鳍条间距、鳍面长宽比、鳍面安装的松紧程度对于波动鳍产生的推力均有显著影响。
1 波动鳍运动模型
鳐科鱼类的波动鳍形状大小各异,在不同的推进模式下波动鳍的运动模式也有所不同,但在稳态情况下波动鳍的运动形式均可近似于正弦波。本文主要研究波动鳍稳态运动下的推力情况,因此把波动鳍的鳍面波简化为正弦波,并且对真实鱼类波动鳍的结构做了简化,具体做了如下假设:(1)鳍面形状为矩形;(2)鳍条等幅振荡。图1为简化的鳍面结构,鳍面由N根内嵌的鳍条与柔性蹼组成,鳍条之间的间距相等。每根鳍条遵循以下运动规律:

式中:θi0表示鳍条的初始角位置;A代表鳍条的振幅;f表示振荡频率;φ则为相邻鳍条之间的相位差。波动鳍的运动能够产生x,y,z3个方向的推力,分别为前向推力、侧向推力和升力,其中沿着y方向的侧向推力与z方向的升力均值为0,本文只研究前向推力,对侧向推力与升力不进行探讨。
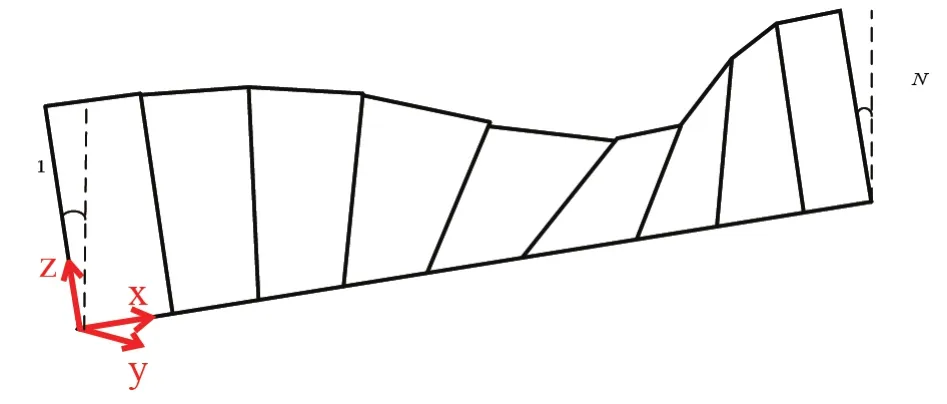
图1 简化的波动鳍模型
2 波动鳍结构设计
基于鳐鱼的形态学研究结果[4]以及上一节的运动模型假设,设计了如图2的仿生波动鳍推进装置。仿生波动鳍简化了鳐鱼的鳍面结构,外形上采用了矩形的形状。使用3根等长且等间距布置的鳍条构成鳍面的鳍线阵列,每根鳍条都由一个独立的舵机作为肌肉组织驱动,完成等幅的正弦摆动动作。为了使鳍面具备一定的弹性和延展性,波动鳍的柔性蹼材料选择了0.3 mm厚度均匀的硅胶薄膜。整个鳍面由硬铝合金的鳍条夹着硅胶膜组成。波动鳍的鳍条长240 mm,宽8 mm,厚2 mm,鳍条与薄膜之间通过四颗螺丝固定。舵机与鳍条之间通过圆盘连接器连接,圆盘连接器为3D打印的尼龙材料,强度足以承受鳍面运动时水的反作用力矩。

图2 仿生波动鳍推进装置
采用铝合金型材作为仿生波动鳍的脊骨,舵机与鳍条的组合被等间距地固定于铝合金型材上。如图3示意图所示,硅胶膜在鳍条上展开的长度为H,宽度为W,面积为H×W,鳍条之间的间距为D。在舵机的驱动下,3根鳍条带动着硅胶膜完成正弦波动,从而在水下产生推力。

图3 仿生机器人推进装置示意图
3 电子控制系统
仿生波动鳍推进装置采用7.4 V的锂电池供电。作为核心驱动器的伺服电机采用FEETECH SCS46型号的串行总线舵机。上位机采用WINDOWS系统的笔记本电脑,运行着中枢模式发生器(Central Pattern Generators,CPGs)[9],产生实时的舵机角位移,通过一根USB数据线,以1 000 000波特率的速度与舵机的驱动电路板进行串口数据通信,传输舵机的实时角度,驱动电路板完成舵机的统一控制。舵机内部的处理器实时采集舵机的角位移、速度、电压、电流等信息,将数据通过驱动板发送给上位机进行显示,电子控制系统如图4所示。

图4 电子控制系统
4 实验平台设计
图5为仿生波动鳍推进装置实验平台。仿生波动鳍推进装置被固定在一根直线导轨的滑块上,由铝型材组成的支架连接着滑块与仿生波动鳍推进装置。滑块只能沿着导轨前后运动,滑块上方连接的亚克力平面放置着仿生波动鳍推进装置的控制电路板和电池。为了得到仿生波动鳍推进装置产生的推力的实时反馈,直线导轨上装有一只S形拉压力传感器,其测量量程为1 kg 。随着仿生波动鳍的运动,其产生的实时推力由S型拉压力传感器测得并通过一块显示仪表进行显示,同时此数据将传送到上位机的数据采集记录软件。
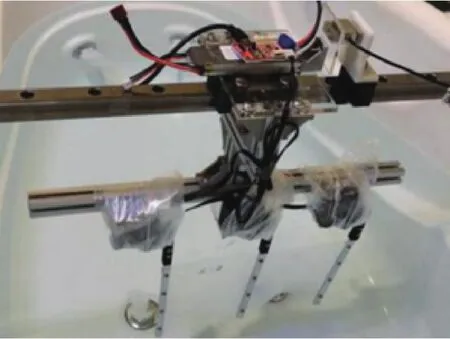
图5 仿生波动鳍推进装置实验平台
实验所使用的水槽长1.6 m,宽0.8 m。实验装置被固定在水槽上方。由于滑块与直线导轨之间存在摩擦力作用会导致实验的误差,因此,直线导轨的两端在固定时设置了高度差,安装有传感器的那一端偏低,使得滑块本身重力的前向分量大于摩擦力,从而减小摩擦力的影响。
5 实验结果
实验测试的主要目的在于研究物理因素——鳍面长宽比、鳍条间距、鳍条材质、鳍面松紧程度等条件对于仿生波动鳍产生的推力的影响。以上物理因素相关参数的实验都是在控制参数A=30°,f=1.0 Hz的条件下进行。对每一组实验都进行了5次重复测试,以重复测试的平均值作为这一组实验的最终结果,以降低随机扰动对实验结果的影响,每一次实验选取仿生波动鳍的6个运动周期进行采样,并且确保每一次实验前鳍条的位置处于中值、水槽内的水保持平静。每次采样测得的推力数据需要减去静止状态下传感器测得的初始值才能作为真实值,并且由于推力不是一个稳定值(如图6-b),因此每一次实验需要取波动鳍6个运动周期内推力真实值的平均值作为本次实验的结果。
其中一次测试实验的结果如图6-a所示,控制参数为幅值A=30°,频率f=1.0 Hz,相位差φ=35°,记录推力数据的起始时间在舵机开始运动之前。由上到下分别为舵机反馈得到的实际角位移和测得的推力的原始数据曲线,从实验结果可以看到:(1)仿生波动鳍推进装置产生的推力呈三角波形式,并且其周期为舵机运动周期的1/2;(2)波动鳍的轴向推进力方向与鳍上波传播的方向相反,如图3推进装置示意图所示,当相位差为正值时,仿生波动鳍上传递的正弦波的方向为第3根鳍条到第1根鳍条,即沿着x轴负方向,而仿生波动鳍所产生的轴向推进力方向沿着x轴正方向,这个结果验证了之前许多研究的理论结果[10]。
图6-b中舵机角位移在0~1 s内的过渡过程为CPG网络的从初始状态到稳态的过渡过程,3台舵机的运动轨迹相差35°相位角,运动周期为1 s,幅值小于30°。在理想状态下,3台舵机的幅值应该达到30°,但由于舵机能力的限制,实际的幅值小于30°,并且3台舵机的最大幅值不同,这是由于3台舵机的速度与加速度略有差别。下图推力数据曲线展示的推力的起始值从1.2 N开始,这个数值为静止状态下仿生波动鳍推进装置的重力分量。
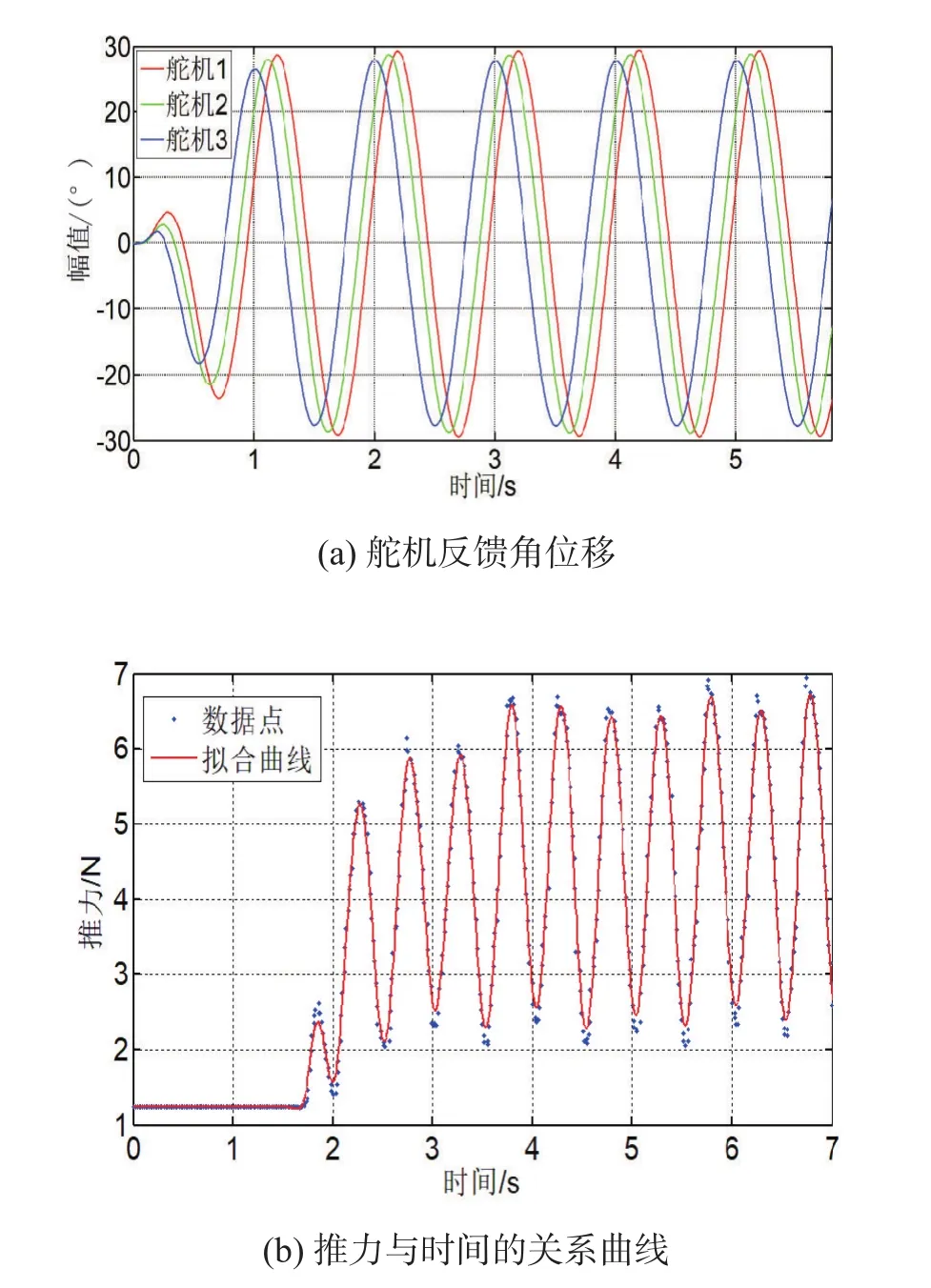
图 6 控制参数 A=30°,f=1.0 Hz,φ=35°下的实验结果
5.1 鳍条间距
受限于实验平台的尺寸,实验选取的鳍条间距D的参数范围为(8 cm、9 cm、10 cm、11 cm),对每一组间距都测量了30°到60°范围内的7组相位差情况下的推力值。实验结果如图7所示,可以看到,开始时随着鳍条间距的增大,仿生波动鳍产生的推力也增大,但在间距为11 cm时仿生波动鳍产生的推力却几乎没有增长,说明推力的增幅随着间距的增大而减小,这一点与Sfakiotakis M等[10]的理论研究结果相符合。另外可以看到,当鳍条间距为11 cm时,在30°到60°的相位差范围内,推力的大小几乎不变,而鳍条间距为8 cm的鳍面,在此范围内的推力大小则明显减小,观察四组参数的推力数值曲线,可以得到结论:随着鳍条间距增大,在30°至60°的相位差范围内,推力随着相位差的增大产生的变化量也越小。得到这样结果的原因,推测是由于鳍条间距越大,相邻鳍条之间的最大角度差越大,在相同相位差的情况下,鳍条间距越宽的鳍面,鳍面带给执行机构的拉扯力越小,从而对推力的影响越小。

图7 不同鳍条间距下的推力实验结果
5.2 鳍面松紧度
实验固定了鳍条间距为7 cm,选取了(14 cm,15 cm)两组鳍面宽度W,分别代表“紧”和“松”两种状态,在幅值为30°,频率为1 Hz的情况下,测量了从20°~60°相位差所对应的推力值,每5°进行一次采样,测试结果如图8所示。可以看到两种鳍面状态下推力大小的差别不大,相较之下,较紧的鳍面略占优势,能够取得更大的推力值。在相位差为60°时两者的推力相差最大,较紧的鳍面推力大小为1.43 N,较松的鳍面推力大小为1.23 N,相差0.2 N。

图8 不同松紧度下的推力实验结果
5.3 鳍面长宽比
实验固定了鳍面面积为285 cm2,选取了4组长宽比不同的鳍面进行测试r=H/W=(0.65,0.79,0.99,1.27)。实验的控制参数为幅值30°,频率1 Hz,相位差20°~60°,每5°进行一次采样。实验结果如图9所示,图例的标注为长宽比r。可以看到,当相位差小于等于45°时,较大的长宽比r,即对应较长的鳍面长度H,能够取得更大的推力,将4组长宽比按照推力大小进行排列,顺序为(1.27,0.99,0.79,0.65),相位差大于45°之后,出现了曲线相交的情况,当相位差达到60°时,前3组鳍面推力大小的顺序正好相反,推测这是由于较小的鳍条间距在此时产生了较大的鳍面拉扯力,长宽比为0.65的鳍面由于之前的推力差距较大,因此在60°相位差的范围内没有超过其他3组。

图9 不同鳍条长度下的推力实验结果
5.4 鳍条材质
实验对于同一张鳍面,选取了不同材质的两种鳍条,一种是铝合金,具有较大的刚性,不易产生形变;一种是亚克力,硬度低但弹性好,容易形变。在幅值为30°,频率为1 Hz的控制参数下测量了相位差—推力数据,选取的相位差范围为20°~65°,间隔5°进行采样。实验结果如图10所示,可以看到采用铝合金材料作为鳍条的仿生波动鳍相比于亚克力材料具有更大的推力,并且影响显著。推测是由于亚克力易形变的特性造成鳍条末端的轨迹曲线变形严重,而铝合金鳍条由于刚性较强,其末端轨迹基本符合舵机的输出,因此产生推力更大。

图10 不同鳍条材质的推力实验结果
6 结 论
本文设计了仿生波动鳍推进装置,详细介绍了仿生波动鳍的机械结构与电控系统。通过实验测试分析了鳍条间距、鳍面松紧度、鳍面长宽比、鳍条材质4个物理因素对于仿生波动鳍推进装置产生的推力的影响,得到以下研究结论:
(1)鳍条间距对仿生波动鳍产生的推力具有两方面的影响,一方面,仿生波动鳍产生的推力随着鳍条间距的增大而增大,但增幅减小;另一方面,鳍条间距较宽的鳍面受到相位差增大的影响而产生的变化量也越小;(2)鳍面松紧度对于仿生波动鳍产生推力的影响较小,较紧的鳍面能够比较松的鳍面产生略大一些的推力,但也容易由于鳍面过紧而影响机构的运动;(3)在相位差小于等于45°时,具有较大长宽比(或者说鳍条长度更长)的鳍面,能够产生更大的推力,但当超过该相位差后,较大长宽比的鳍面不再具有优势,反而是较小长宽比的鳍面能够取得更大的推力;(4)鳍条材质对于仿生波动鳍产生的推力具有明显的影响,强度较小的亚克力材质的鳍条由于形变的影响,其产生的推力明显小于强度较高的铝合金鳍条产生的推力。后续的研究中,将结合理论模型与实验结果更深入地分析物理因素、控制参数对于仿生波动鳍的影响。
猜你喜欢
今日农业(2021年5期)2021-05-22
今日农业(2019年12期)2019-08-13
中国交通信息化(2019年4期)2019-07-13
中国外汇(2019年23期)2019-05-25
文学少年(原创儿童文学)(2019年1期)2019-05-23
电子制作(2018年1期)2018-04-04
航空模型(2016年5期)2016-07-25
小学生导刊(低年级)(2016年5期)2016-05-27
海军航空大学学报(2015年3期)2015-11-11
航空模型(2015年6期)2015-10-21