一种基于特征互补的新型长期跟踪算法
2021-04-24 09:05:10魏念巍
湖南城市学院学报(自然科学版) 2021年2期
夏 亮,张 亚,魏念巍
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
计算机视觉在日常生活及工业生产中作用突出,而目标跟踪已成为该领域研究的重点方向之一,并被广泛应用于安防监控、国防工业、自动驾驶和智能交通等领域[1].传统的目标跟踪算法在简单环境下表现良好,但在目标遮挡、尺度变化、光照变化、背景杂波等干扰场景下,跟踪效果严重不佳,因此,长期稳定的目标跟踪算法是一个值得研究的课题方向.
目标跟踪算法主要包含生成式和判别式2 种方式[2].目标跟踪生成式算法主要对跟踪目标特征进行建模,再搜索相似区域并估计出目标位置,其经典算法有Meanshift 和Kalman Filter.判别式跟踪算法则是将跟踪目标从背景中区分出来,经分类后得到跟踪结果,具有快速、稳定的跟踪表现.近年来,相关滤波跟踪算法在目标跟踪领域有着快速性和稳定性的良好表现,相应领域的研究也迅速展开.2010 年,Bolme 等[3]首次使用相关滤波进行目标跟踪,提出了跟踪器滤波(MOSSE)算法.Henriques 等[4]提出核相关滤波器(KCF)算法,使梯度方向直方图特征(HOG)[5]结合核方法,并引入相关滤波,将特征用核技巧在高维空间进行表达,增强特征和滤波器稳健性.Li 等[6]提出的SAMF 算法融合了HOG 特征与颜色特征(CN),同时根据尺度特征估计目标的最佳尺度,其跟踪精度比KCF 算法有较大提升.2016 年,Bertinetto等[7]通过构造2 个独立的岭回归框架,提出了特征互补学习跟踪算法(Staple),增强了系统在目标形变与快速运动等场景下的抗干扰性能.虽然Staple 算法具有较好的跟踪性能,跟踪速度也较快,但是当目标在被严重遮挡、超出视野、有相似目标干扰等场景下时,Staple 算法会出现目标丢失及模型漂移等状况.
为了解决长期目标跟踪过程中出现的以上问题,本文在Staple 算法基础上,提出一种依赖丢失重检测机制的长期目标跟踪算法,对长期目标跟踪过程中的目标丢失进行判断,调用GMS 匹配算法[8]进行重检测并对模板更新,使跟踪器重定位初始目标,有效保持该跟踪算法的稳定性与准确度.
1 Staple 跟踪算法
Staple 算法分别用梯度方向直方图特征和颜色直方图特征来构建2 个独立的滤波器[9],根据融合响应最大值确定对应的目标位置与尺寸,并在当前帧的跟踪响应最大值位置提取表征对模板进行更新.
1.1 相关滤波器
相关滤波器提取目标及其附近区域的HOG表征,f表示d维的特征构成样本,根据岭回归方程得到的目标模型为

1.2 颜色直方图
在训练阶段采用颜色直方图判别器训练模板φ,提取颜色特征,且目标在每个特征维度的损失函数为

2 长期跟踪算法
通过设计一种基于特征匹配的重检测模型,改善Staple 算法在长期目标跟踪过程中的易受干扰而丢失目标的缺陷,使其对受遮挡、光照变化等影响具有更强的适应性,从而保持稳定地长期目标跟踪.
2.1 基于特征匹配的重检测
本文采用特征匹配算法(GMS)作为检测器,该算法匹配目标的ORB 特征,对计算出的匹配成功的特征相似点部分进行过滤,并消除错误匹配部分,其基于网格运动统计的方式能够快速、准确地对特征提取匹配[12].将目标图像Im和候选匹配图像It匹配的区域表示为m,t,iQ⊆Q为该区域之间的点集,考虑各个特征点匹配是独立的,可近似认为邻域匹配点数iρ为二次分布,即
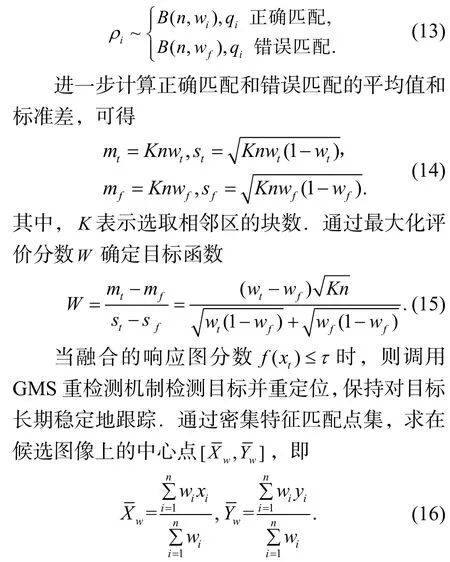
其中,ix和iy为预匹配集中匹配对的坐标;n为匹配点集总数;iw为点匹配正确时周围点的支持概率.根据匹配结果确定跟踪目标位置,分别将该位置对应的图像块代入相关滤波器模型和颜色直方图模型中计算,使跟踪器初始化目标跟踪.
2.2 算法步骤
所提出的基于特征互补和重检测(Re_Staple)算法的步骤如下:
1)根据输入初始帧图像0x以及目标框,建立相关滤波器模型和颜色直方图模型;
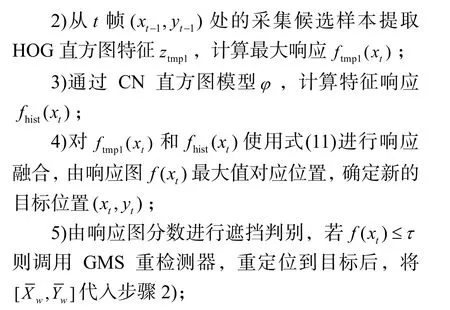
6)利用式(3)~式(4)更新当前帧的滤波器模型h,利用式(9)~式(10)更新颜色直方图模型φ.
3 实验对比分析
实验配置为 Intel(R) Core(TM) i7-7700HQ(2.8 GHz)CPU,8 G 内存;算法平台版本为Matlab 2018a,阈值τ选取为 0.18.选择公开数据集OTB-2013,OTB-2015[13]和颜色跟踪基准Temple Color-128[14]中的部分视频序列,并对其在6 种不同的视觉干扰跟踪场景(尺度变化(SV)、目标遮挡(OCC)、变形(DEF)和快速运动(FM)等)下进行分析对比,以验证算法的鲁棒性.
3.1 综合性能评估
为有效评估基于特征互补学习与重检测的长期跟踪算法Re_Staple 的实用性,选取KCF,CSK,CT,Staple,LCT 和fDSST[15]等主流算法进行对比,结果如图1 所示.

图1 不同算法的精确度和成功率对比
图1 为改进后的算法在一次通过评估(OPE)距离精度(DP)阈值为20 像素和重叠成功率(OS)阈值为0.5 条件下,与其他算法的对比结果.由图1可以看出,所提算法的精确度为81.1%,相比于Staple 算法提升了17.5%;成功率为84.5%,相比于Staple 算法提高了17.8%;其精确度和成功率均优于其他对比算法,综合性能表现优异.
表1 列出了几种对比算法的一次通过评估距离精度、重叠成功率和速度的详细对比结果.
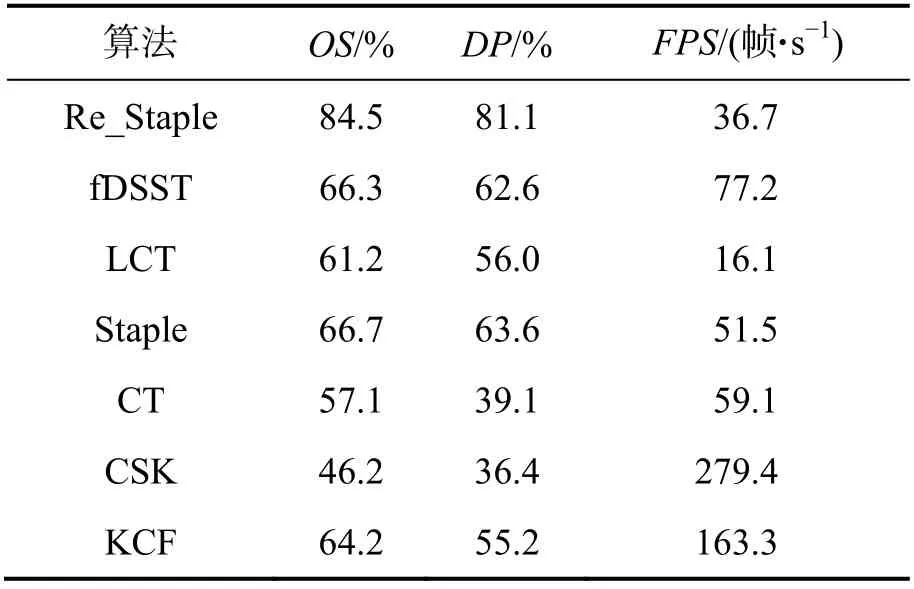
表1 各算法重叠率、平均精度和速度对比
从表1 可看出,改进后的算法综合性能优异,整体的重叠率和平均精度都表现突出,并展现了36.7 帧·s-1的速度,相较于速度快但准确度低的CSK 算法更加实用,能满足实际工程的需求.
3.2 不同场景下的算法性能分析
为充分对比在不同干扰环境下各算法的表现差异,实验选取了尺度变化、目标遮挡、变形和快速运动等6 个场景,测试了所提算法的一次通过评估准确度,其结果如表2 所示.
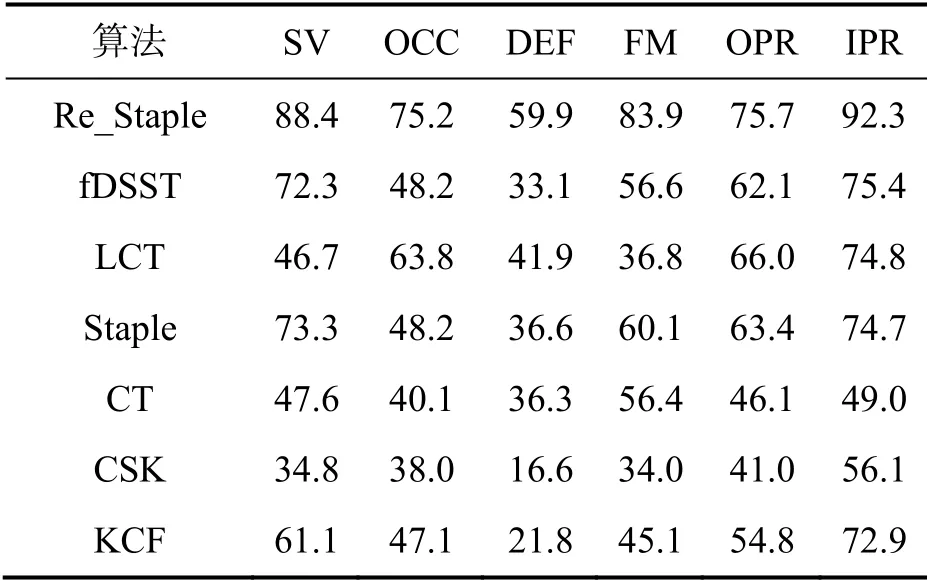
表2 不同场景下各算法性能对比 %
由表2 可知,本文所提算法在遮挡、尺度变化、快速运动等场景下表现优异.如在遮挡场景下,其准确度达到75.2%,相比Staple 算法提升了27.0%,性能上有着显著改善.这说明采用特征融合的算法更能适应目标丢失的情况,对颜色变化明显的干扰场景也有着良好的鲁棒性.
3.3 遮挡重检测性能测试
为进一步验证所提算法在遮挡重检测方面的性能,将改进前、后算法的跟踪响应最大值曲线进行对比,选取2 个典型遮挡序列(Carchasing_ce1和jogging-1)进行测试,结果如图2 所示.
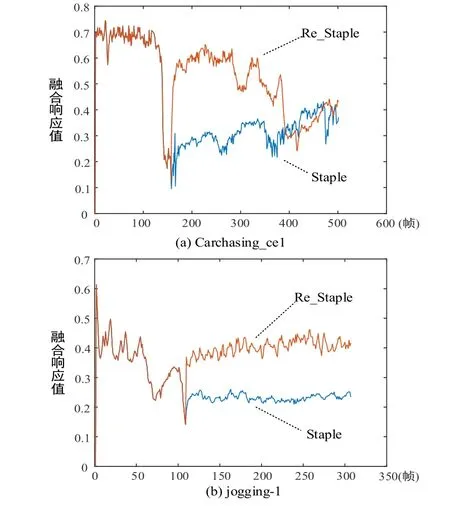
图2 遮挡重检测结果
由图2 可知,在视频序列Carchasing_ce1 的第143 帧和视频序列jogging-1 的第70 帧,由于目标被障碍物遮挡,导致跟踪器丢失目标,当目标重新出现的时候,Staple 算法并不能对目标稳定跟踪,而改进的Re_Staple 算法可以重新找回丢失的目标,并对其长期有效地跟踪,这验证了所提算法对丢失目标具有良好的重检测能力.
4 结论
为弥补传统Staple 算法缺陷,在相关滤波和颜色特征模型的基础上,使用基于网格运动统计的特征匹配算法(GMS)作为检测器,通过对受遮挡和丢失目标的重检测,重新定位到目标的确切位置,保证长期稳定地跟踪目标.在公开数据集上验证了所提算法的性能,综合性能评估结果表明,其一次通过评估精确度为81.1%,重叠成功率为84.5%,均优于各对比算法;不同场景下的算法性能对比和遮挡重检测测试结果表明,所提算法具有较强的颜色和尺度变化适应性,且在有遮挡和相似目标干扰等场景下,也能准确、稳定地对目标进行长期跟踪.
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
当代水产(2022年6期)2022-06-29 01:12:02
中国生殖健康(2020年8期)2021-01-18 03:05:34
电子制作(2019年11期)2019-07-04 00:34:38
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
中国生殖健康(2018年3期)2018-11-06 07:20:12
电子制作(2018年16期)2018-09-26 03:26:50
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
火控雷达技术(2016年2期)2016-02-06 02:29:00