差异化及路径综合优化的变电站机器人巡检策略
2021-04-24 09:05杨京渝赵伟林
湖南城市学院学报(自然科学版) 2021年2期
杨京渝,彭 丽*,殷 亮,赵伟林
(1. 湖南城市学院 智慧城市能源感知与边缘计算湖南省重点实验室,湖南 益阳 413000;2. 国网湖南省电力有限公司 湘西供电分公司,湖南 吉首 416000)
随着电网负荷的逐渐增加,电网规模也随之扩大,传统固定周期的巡检模式难以适应目前设备大规模增长的现状[1].为了提高巡检质量及效率,避免人力、资金和时间的浪费,运营维护单位开始探索差异化巡检模式.差异化巡视方法是综合考虑设备的健康状态、价值、重要程度等因素,因地制宜、动态确定不同的巡视周期和巡视内容[2].文献[3]提出了输电线路差异化的运维方法,在一定程度上解决了输电线路运行与维护工作资源不足、管理粗放等问题;为提高线路巡检质量,缓解巡检人员缺员与日益增长的输电设备的矛盾,文献[4]提出了基于状态评价的输电线路差异化巡检模式;文献[5]提出了以设备分级为出发点,动态调整设备巡视周期和项目的差异化巡检策略.以上差异化巡检模式均具有很好的参考价值,但其研究的主要目的是为了解决在人工巡视中存在日益增长的设备与维护人员减少之间的矛盾,暂未在机器人智能巡检中应用.
随着泛在电力物联网及5G 通信技术的发展,通过电力巡检机器人对输电、变电、配电环节实现全面的无人运维检测已经成为我国智能电网运检的发展趋势.为此,变电站机器人巡检路径规划问题也已开展了大量研究,机器人巡检路径规划算法主要分为图形搜索法、势场规划法和人工智能优化算法3 大类.人工智能优化算法相比于其他2 类算法应用更为广泛,主要有Q-learning算法、蝙蝠算法、灰狼优化算法和遗传算法.其中,遗传算法相对于其他算法在路径规划方面的应用更为普遍,但该算法也存在诸多缺点:如有时会出现不收敛的情况,即使在单峰或单调条件下也是如此,易出现早熟、收敛速度慢、易陷入局部最优等.针对上述问题,为提高算法的全局搜索能力和收敛速度,文献[6]在选择操作中引入模拟退火思想的改进遗传算法;文献[7]对遗传算子中的交叉算子和变异算子进行了改进,使遗传算法的进化能力得到了改善.然而,目前变电站机器人巡检的路径规划问题均只考虑了巡检路径最优,对站内所有设备“一视同仁”,未针对重要设备、隐患设备、重要用户设备等进行优先巡视,从而导致因发现缺陷不及时而引发电网事故的不利局面.
基于上述分析,为综合考虑变电站设备的差异化巡检及巡检路径最优,笔者以设备分级为出发点,构建设备优先级巡视权重,并动态调整巡视路径,对影响电网安全风险、状态严重及关键的设备予以优先巡视,以实现重要设备的精准管控,从而降低电网运行风险.根据站内设备健康状态和重要程度来确定设备的管控级别,建立全面、完善、科学的评级模型;以管控级别为依据,进行差异化巡检,提升巡检工作智能化、标准化和差异化水平;构建同时考虑设备优先级与巡检路径长度的优化目标函数[8-10].以某220 kV变电站为例,建立路径规划环境模型,结合遗传算法对其进行规划并寻找最优巡检路径.
1 设备差异化巡检策略
以设备分级为出发点,对影响电网安全风险、状态严重及关键的设备采取优先巡视,对运行工况较好、重要度低的设备则最后巡视,以便及时掌握和发现关键设备的缺陷和隐患,为检修处理争取时间,降低电网运行风险,确保电网安全稳定运行.依据设备健康度和重要度2 个维度来综合判定设备的管控级别[11-12],并按照管控级别确定各类设备巡检的先后顺序.
1.1 巡检设备管控级别
设备健康度主要根据变电设备的状态评价与风险评估、家族性缺陷、存在重大隐患等将设备确定为严重状态、异常状态、注意状态和正常状态4 个等级;设备重要度主要结合电压等级、设备价值以及对重要用户供电情况将设备确定为关键设备、重要设备、关注设备和一般设备4 个等级.设备健康度和重要度的状态等级及其判别依据如表1 所示.

表1 设备健康度和重要度的状态等级及其判别依据
依据设备健康度和重要度2 个维度来综合确定设备的管控级别,并建立设备风险矩阵,结果如图1 所示.

图1 设备风险矩阵
从图1 可知,在设备风险矩阵中,变电站内所有一次设备可分为Ⅰ、Ⅱ、Ⅲ、Ⅳ 4 大类.其中,Ⅰ类设备存在风险的级别最高,因此其对应的管控级别也最高;Ⅳ类设备存在风险的级别最低,其对应的管控级别也相应最低;其次的管控级别为Ⅱ、Ⅲ类设备.
1.2 优先级巡检原则
按照风险矩阵中的设备管控级别,确定设备巡检优先级权重[13],将设备巡检优先级从高到低依次分为1~4 共4 个等级.由图1 可知,健康度为严重或异常的关键设备,以及健康度为严重的重要设备,其管控级别为最高级,设备优先巡检的权重最高;健康度为正常的一般设备,其管控级别为最低级,设备优先巡检的权重最低.
2 基于遗传算法的巡检路径优化
变电站巡检机器人能高效完成巡检任务的前提是具有合适的路径规划,而遗传算法具有简单易用、随机搜索和可扩展等众多优点,其在路径规划中得到了广泛应用.在遗传算法中,其染色体编码机制、适应度函数、遗传算子、终止条件等基本要素的确定是运用遗传算法求解最优路径的首要任务.遗传算法求解机器人巡检路径问题的步骤如下:
1)确定编码方式.初始化种群,采用巡检点序列编码方式生成染色体(染色体为一条自起始点到目标点的可行路径),并设置算法运行参数.
2)建立适应度函数.为了优化算法搜索的最终结果和改善算法的收敛速度,选取机器人行走的路径长度的倒数作为适应度函数,即


popsize为种群中个体的数量;交叉操作采用部分映射杂交,如每对染色体a和b,先按交叉概率pc(交叉概率设置为0.9)随机产生2 个交叉点q1=4和q2=7,并将2 个点的基因进行交换,用*代替交叉点两端的基因片段中存在的重复数,再利用部分映射的数学原理完成*数字的替换,其具体实现过程为
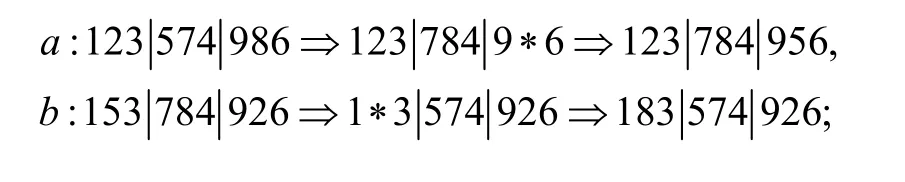
变异操作依据变异概率pm(变异概率设置为0.1)随机选取染色体上的2 个点q1=2 和q2=8,互换2点的基因数字位置,其实现过程为

4)设置终止条件,结束算法迭代,得到最优个体.遗传算法的进化代数太大,种群过于早熟不可能再收敛;而进化代数太小,算法不容易收敛.因此,本文算法的进化代数取值为200,当达到最大代数时停止迭代,得到最优个体,最优个体(染色体)即为最优路线方案.
3 基于设备优先级的巡检路径优化问题建模
3.1 建模原则
变电站巡检机器人考虑设备优先级的巡检路径规划建模主要遵循以下原则:巡检机器人以巡检中心作为起始点和终止点;每个巡视点在单次任务中,巡检机器人只经过1 次;巡检机器人优先巡视优先级别高的设备;路径规划建模的目标是使巡检路径的行程最短.
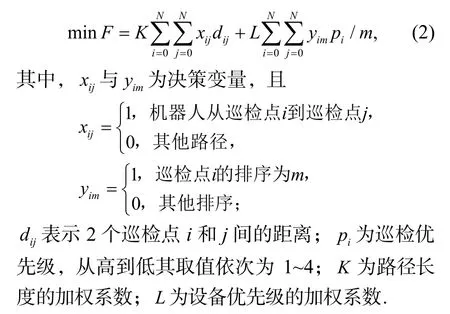
3.2 建立目标函数
考虑设备优先级的巡检路径规划目标函数可表示为
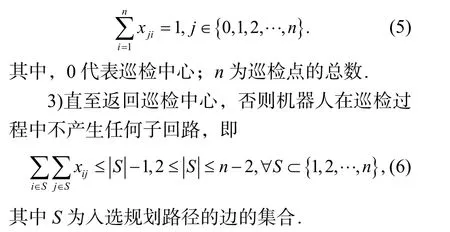
3.3 确定约束条件
巡检路径规划目标函数的约束条件为:
1)机器人从巡检中心出发,最后回到巡检中心,即
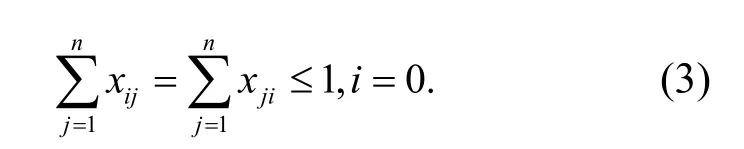
2)每个巡视点在单次任务中,机器人只经过1 次,即

4 算例仿真与分析
4.1 环境模型
以某220 kV 变电站为例,建立环境仿真模型(如图2所示).该变电站共设置62个巡检点(不包括巡检中心),以五角星表示巡检点;设置好各区域设备的巡检优先级.本例以设备的重要程度及电压等级将变电站内的一次设备划分为4 类优先级,其中,主变的优先级设置为1(巡视点五角星颜色为红色);220 kV 设备区设置优先级为2(巡视点五角星颜色为绿色);110 kV 设备区设置优先级为3(巡视点五角星颜色为蓝色);10 kV 设备区设置优先级为4(巡视点五角星颜色为黄色).
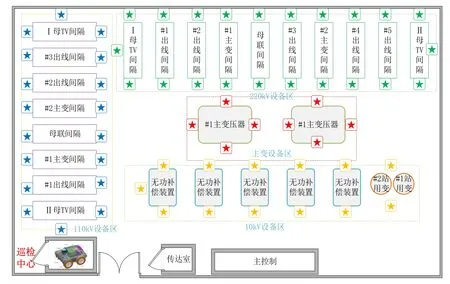
图2 某220 kV 变电站巡检模型示意
将变电站巡检模型中62 个巡视点用平面直角坐标的形式表示出来,每个巡检点对应一个坐标,如图3 所示.进一步确定各巡检点的序号和巡检优先级别,如图4 所示.

图3 巡检点平面坐标

图4 巡检点编号及优先级别
图4 中的各数字分别代表巡检点的编号和优先级,如48/1 表示巡检点48 对应的优先级为1,21/2 表示巡检点21 对应的优先级为2,2/3 表示巡检点2 的优先级为3,60/4 表示巡检点60 对应的优先级为4.本例中,巡检中心的编号为1,每次巡检任务只能从1 出发,最后回到巡检中心.
4.2 仿真结果分析
为了验证基于设备优先级的巡检路径模型的有效性,结合遗传算法,利用Matlab 进行仿真实验.将算法中初始种群大小设为100、最大进化代数设为200、交叉概率设置为0.9、变异概率设置为0.1.
从综合考虑设备优先级和最短路径的目标函数式(2)中可知:K为路径长度加权系数,L为设备优先级的加权系数;在每次巡检任务中,K L、取值的大小即决定了任务中路径长度与设备优先级分别所占的权重.因此,为验证基于设备优先级的机器人巡检路径规划模型的正确性,进行了多次仿真实验,且每次实验中加权系数K、L的取值均不相同,并对每组加权系数取值进行反复实验,在所得结果中取最优值进行统计分析.各组加权系数实验的最优结果如表2 所示.
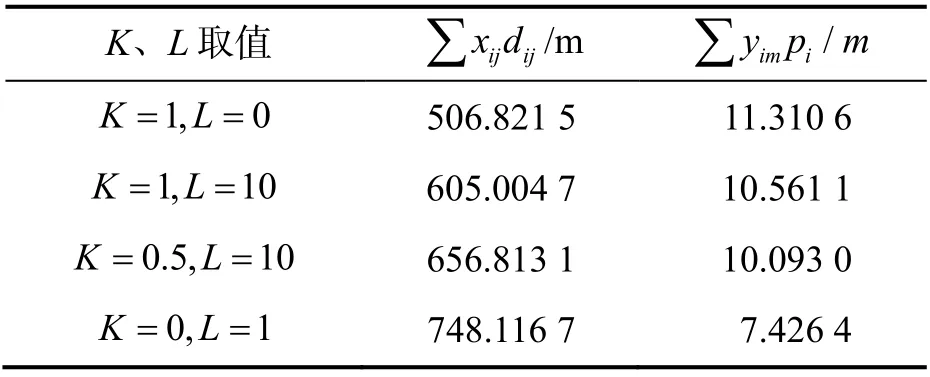
表2 不同加权系数路径规划结果统计
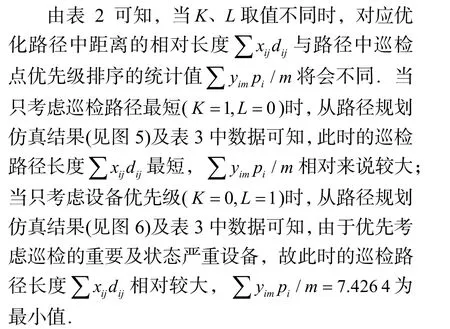
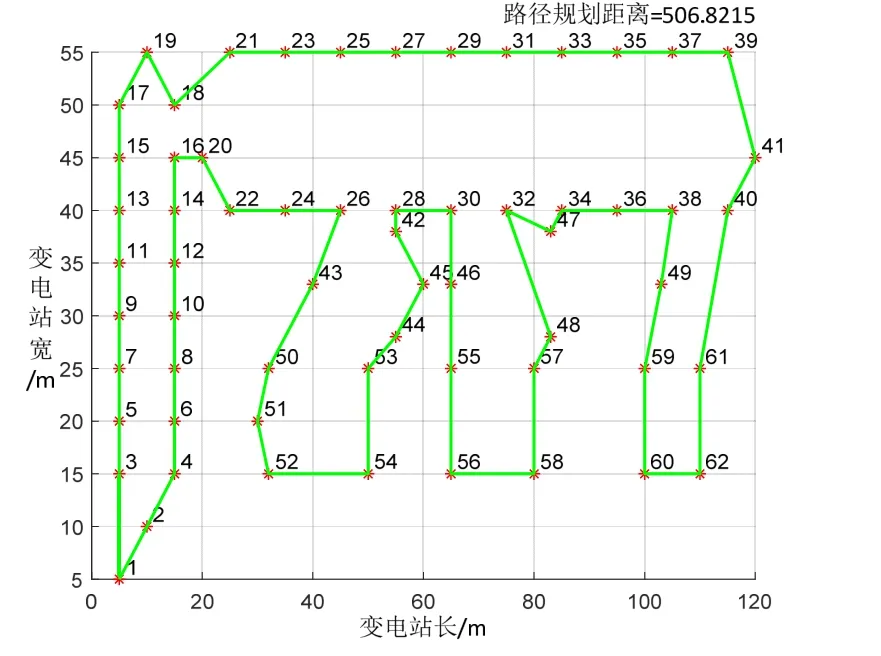
图5 K=1,L=0 时路径规划
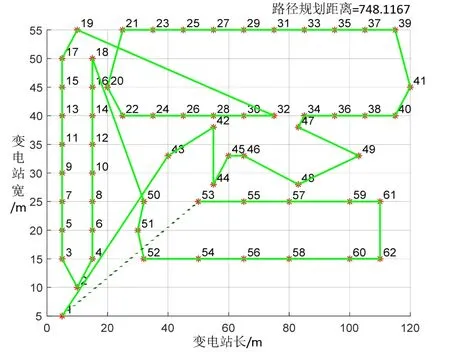
图6 K=0,L=1 时路径规划

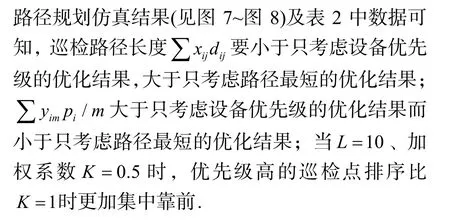
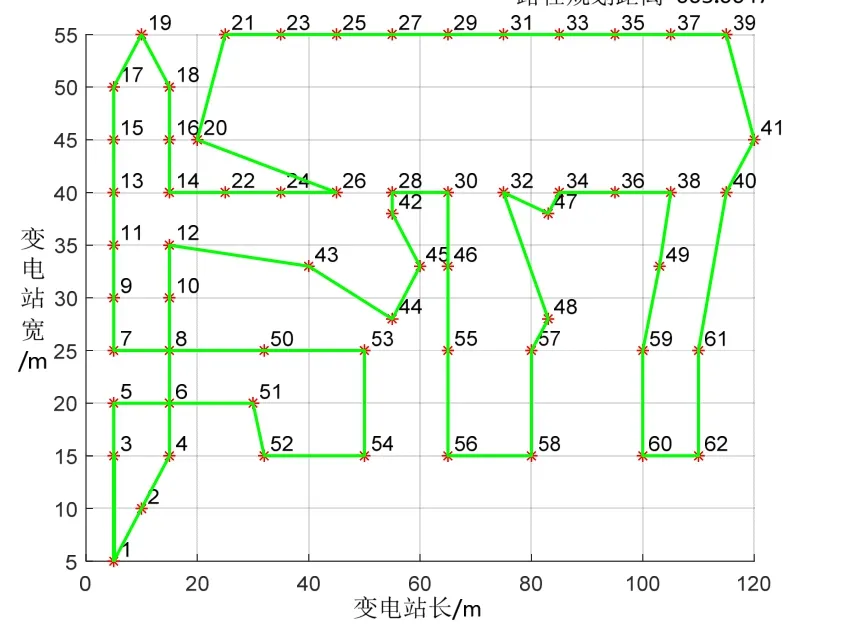
图7 K=1,L=10 时路径规划
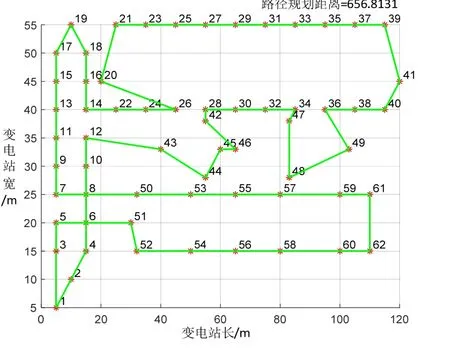
图8 K=0.5,L=10 时路径规划
通过上述仿真实验结果及分析可知,当不考虑设备优先级时,可得到巡检路径距离最短;当只考虑设备优先级时,巡检路径距离最长;当同时考虑巡检路径长度和设备优先级时,每次巡检任务中巡检路径和设备优先级所占的比重取决于加权系数K和L的取值.因此,合理选择两者的取值,可以实现优先级别高的设备先巡视,同时保证路径最优.
5 结束语
构建了同时考虑设备优先级与巡检路径长度的优化目标函数,通过合理选择巡检路径和设备优先级的加权系数,实现了优先级别高的设备先巡视,同时还保证了路径最优;建立了路径规划环境模型,利用遗传算法对其进行规划并寻找最优巡检路径;通过Matlab 仿真及数据分析,验证了该模型的正确性,且其能够满足考虑设备优先级的机器人巡检需求.
在变电站机器人巡检中,通过设备优先级巡检路径规划模型,可动态优化调整巡视路径,对影响电网安全风险、状态严重及关键的设备采取优先巡视,最终实现重要设备的精准管控,确保系统安全稳定运行.
猜你喜欢
汽车工程(2021年12期)2021-03-08
当代水产(2019年11期)2019-12-23
电子制作(2019年16期)2019-09-27
文苑·感悟(2019年8期)2019-08-06
文苑(2019年15期)2019-08-01
电子制作(2019年24期)2019-02-23
商周刊(2018年25期)2019-01-08
晚晴(2018年3期)2018-12-06
家庭影院技术(2018年5期)2018-06-29
家庭影院技术(2018年3期)2018-05-09