基于智能交叉带分拣系统的机械臂设计
2021-04-23 12:48高国亮
哈尔滨商业大学学报(自然科学版) 2021年2期
高国亮, 巩 雪
(哈尔滨商业大学 轻工学院, 哈尔滨 150028)
随着社会的不断发展和进步,人工分拣包裹逐渐已经被取代,随之而来的是高度智能机械化分拣包裹,在分拣环节中,机械臂已经成为了不可缺少的一部分,从机械臂问世到现在,随着科学技术的不断进步,机械臂开始在各个领域得到了应用,并且在快递分拣方面开始取代人力.最早的机械臂通过安装在手臂上的操作工具和设备的不同代替人类做一些繁重的搬运工作,由于速度快,承载能力大,精度高,对提高生产效率起到了很大的作用,现在的机械臂主要应用在汽车行业,例如,日本丰田、德国宝马都已经把机械臂应用到生产线的各个位置进行一些搬运、焊接、喷涂等工作.另外,机械臂在电子产品、化工、食品、军事等领域也都起着很大的作用.近年来,机械臂在仓储物流业中迅猛发展,AGV、码跺机器人、分拣机器人应用在物流的各个领域.例如,加拿大机械臂公司clearpathrobotic参与研究的搬运机械臂解决了搬运大体积物料运输.日本的Yaskawa、OTC也一直致力于研究搬运机械臂,国内对于机械臂研究起步较晚,通过借鉴国外的优秀研究结果,各大高校纷纷加入到研究机械臂中,中科院,哈尔滨工业大学、国防科技大学等都研究出了有代表性的机械臂,大大推动了中国的机械臂研究进程[1-3].由于现在交叉带分拣系统中分拣小车对于搬运物品的体积有限制,对于大件包裹必须由人工进行搬运,所以本文主要研究一款搬运机械臂,从而应用到运输带的两侧以及分拣格口旁边进行包裹的搬运,从而节省工人的劳动强度,也间接地提高交叉带的分拣效率,保证分拣的精度[4-5].
1 交叉带结构组成以及相应的功能
交叉带分拣机包括、供包装置、供包台、主机、格口、机械臂组成,通过这几部分共同完成包裹分拣任务[6-7].
1.1 供包装置
供包装置即伸缩带式输送机,通过伸缩装车机卸货,送到送料口1,然后快速的通过运输带,在通过的过程中,2号光电传感器如果检测到有大件包裹,然后反馈到主控制器,主控制器指挥3机械臂抓取到24号运输带上,然后24号运输带运送到相应的格口.格口附近也安装有光电传感器和机械臂,光电传感器接受到主控制器发来的信号以后,等到包裹到达相应的位置就会把信息反馈回主控制器,然后主控制器指挥格口处的机械臂抓取相应的包裹进入格口,完成包裹落包.小件包裹通过运输带进入26号运输带,送入上包台[8].
1.2 供包台
供包台的结构由三部分组成,扫描区、等待区、加速区.包裹先进入4号扫描台,扫描台经过扫描获得包裹条码信息后,把包裹的出发地以及包裹的到达哪个格口或滑槽区还有其他信息或包裹能否顺利落入格口一并传给数据库服务器中,且扫描区的工业相机安装的位置必须正好可以扫描到包裹的二维码,防止出现扫描不到二维码信息.已经扫描的快递在信号控制下进入等待区等候.而且不能同时两个等候,只需要一个快递等候.当模电传感器检查到有的小车上没有快递时,然后匹配相应的小车,同时等待区的控制小车把包裹运送到加速区,通过加速区的控制小车把快递运到匹配好的小车上,通过小车把包裹送入格口.若格口处的模电传感器显示格口已经满格的话,包裹在等待区的时候就会收到信息,返回扫描区重新开始扫描,重复原来的步骤,直至格口没有包裹,然后再分拣.扫描区扫描不到的包裹直接返回以前的传送带重新进入扫描台开始扫描,不能扫描的包裹返回到人工扫码区进行扫描.交叉带分拣机整体结构图如图1[9-11].
1.3 主机
主机对于设备整体运行起着很重要的作用.主机上的小车都有自己的号码,而且每个小车上都有各自的模电传感器.通过模电传感器不断接受信息,不间断的进行上包、分拣、落包,重复以上步骤.当包裹到达要进入的格口位置时,小车上的控制器控制小车带的正反转将包裹送入相应的格口或滑槽.加速区与环行圈主机呈45°夹角,方便包裹顺利进入小车,且与主机速度匹配以确保包裹平稳的运送到小车上.
1.4 格口
滑槽或格口的模电传感器向主控制器传达自己的号码.当小车经过格口或滑槽时,模电传感器检查到小车上没有相应的包裹,就会发送消息给主控制台,由主控制台工作人员指挥供包台,给相应的包裹匹配合适的小车,由小车送到相应的格口.在环形小车将包裹运输到格口或滑槽时,由于有的包裹不能受到激烈的碰撞,所以格口或滑槽部分必
须进行相应的调整.首先,必须给格口或滑槽部分加装一些比较软的材料,如纤维状物质等.或者把格口或滑槽处设置成圆弧状,并将滑槽加工成倾斜皮带运输的一侧.
交叉带式分拣系统如图1所示.交叉带分拣机整体流程图如图2所示.

1—送料口;2、8、9、10、11、12、13、14、15—格口信息显示器;4—扫码区;5—等待区;6—加速区;7—运输小车;16、17、18、19—滑槽;20、21、22、23—格口;3、31、32、33、34—机械臂图1 交叉带式分拣系统简图Figure 1 Schematic diagram of cross-belt sorting system
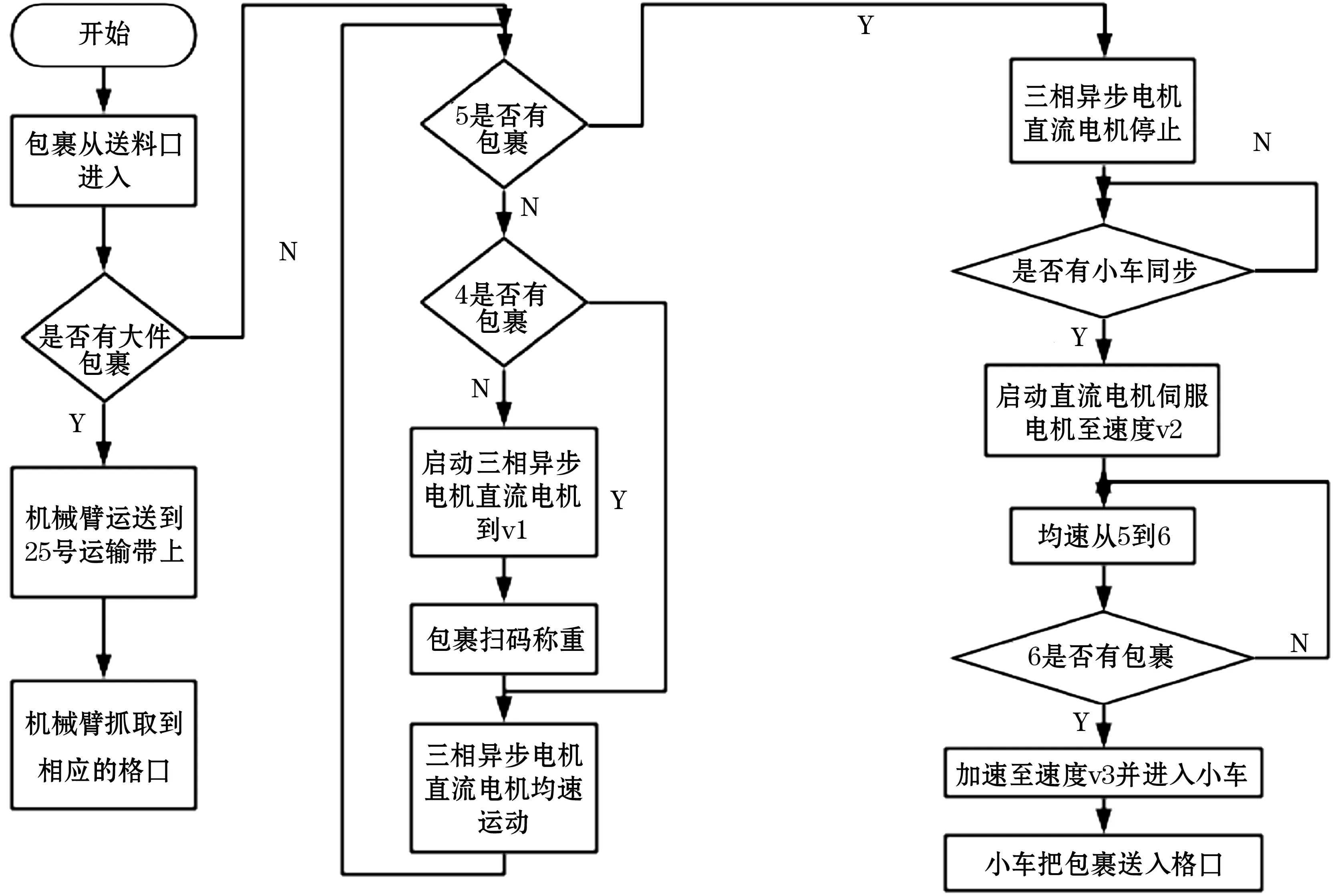
图2 交叉带分拣系统运输流程图Figure 2 Transportation flow chart of cross belt sorting system
2 机械臂设计
传统的交叉带分拣机大件包裹直接进入人工通道进行分拣,本文为了提高分拣效率,节省劳动力,专门设计了一种机械臂代替人力进行分拣.
2.1 机械臂的结构设计
机械臂的三维图如图3所示.由旋转台、肩部、大臂、轴部、小臂、以及吸盘组成.旋转台是整个机械臂的基础,旋转台可以实现绕X轴进行360°旋转,肩部主要安装在旋转台之中,可以沿着旋转台一侧进行旋转,大臂底部连接着肩部,可以实现绕Y轴进行270°旋转,且尺寸较大.用来实现手臂末端的的空间位置.轴部连接着大臂顶部,可以实现沿着一个方向的旋转运动,小臂其中一侧连接着小臂,同样可以实现270°旋转,尺寸较小,用来实现机械手末端的姿态.在吸盘吸住包裹时,通过大臂和小臂的上下左右的移动来进行搬运,可以有效解决搬运过程中机械臂限制因素,同时能够保证搬运的精准度,各部分的移动旋转动力由步进电机来提供,步进电机可以为机械臂的移动旋转提供足够的动力,保证机械臂的速度和精度,并且通过各个步进电机的协同配合来实现把包裹准确的放到目的地.实现包裹的快速搬运.
这款机械臂工作迅速、稳定、动作灵敏,在功能方面较其他传统机械臂更加健全,其功能如下:1)在结构方面设计比较灵活,在旋转台、肩部以及轴部的设计方面,旋转范围更加广泛灵活,工作起来不会受到动作的限制,工作效率非常高.且大臂和小臂也可以上下左右运动,非常适合在仓储物流中夹取包裹;2)工作比较稳定,运动频率比较快,不容易损坏. 适应性较强;3)机械臂材质较好,整体结构具备较强刚度,可以在环境中承受更多冲击.

图3 机械臂的三维图Figure 3 Three-dimensional diagram of the robot arm
2.2 机械臂控制柜组成
机械臂控制柜主要由上位机、动力源部分、PLC控制模块和驱动电机装置构成.首先,动力源为驱动电机、驱动电机装置提供电机旋转的电源,控制电机转速,主控制装置包括:驱动电机装置和PLC控制装置组成,驱动电机装置和PLC控制模块相互联合,驱动电机装置和驱动电机联合,PLC控制模块用来连接电源和驱动电机装置,由上位机发送指令到主控制装置,主控制装置通过PLC推动驱动装置工作,促使机械臂开始工作,工作过程中,主控制装置把机械臂的工作状态实时的传送回上位机,上位机一直可以检测到机械臂的运动状态,当出现错误,可以立即做出改变,从而进行远程监督和控制[12-14].
2.3 机械臂工作原理
当包裹从送料口进入主运输线上时,如果检测到大件包裹,光电传感器会给机械臂的上位机发送大件包裹信息,上位机把大件快递的命令传送给机械臂的主控制装置上,由主控制装置通过PLC控制模块开始接通驱动电机装置,驱动电机装置开始工作,给驱动电机提供足够的动力,由驱动电机指挥机械臂把包裹运送到25号运输带上,当包裹经过格口时,格口附近的机械臂同样执行此操作[15].
3 结 语
由于近年来的快递业务量的迅猛增加,快递公司急需要快速的分拣包裹,同时也应该在分拣环节防止损坏包裹.因此,本文针对大件包裹进行人工分拣专门设计了机械臂,将其应用到分拣线上,极大的提高了物流运输效率,节省了劳动力.
猜你喜欢
今日农业(2021年12期)2021-11-28
科技与创新(2021年15期)2021-11-28
少先队活动(2021年6期)2021-07-22
快乐语文(2020年36期)2021-01-14
商情(2020年31期)2020-07-23
初中生世界·八年级(2019年6期)2019-08-13
文苑(2018年22期)2018-11-19
发明与创新·中学生(2018年8期)2018-09-08
新少年(2017年1期)2017-03-15
小学生导刊(低年级)(2016年9期)2016-10-13