基于DSP的谐振注入式有源滤波器数字双环控制方法
2021-04-19 07:15张书红
齐齐哈尔大学学报(自然科学版) 2021年3期
张书红
(合肥财经职业学院 机械工程系,合肥 230000)
目前,各类电子设备得到广泛的应用,从重工业领域到日常工业生产都离不开电子设备。电能质量的好坏直接影响着人们的日常生活及生产工作,因此,电子设备的实际运行效果,受到了人们的高度关注[1]。谐振注入式有源滤波器是一种用于抑制谐波的新型电力电子产品,其主要运行原理是通过检测电流当中的谐波负载,实现对电流谐波分量的计算,从而控制电路整体的开关动作,实现对电流补偿。
有关谐振注入式有源滤波器控制研究较多,文献[2]提出混合型并联有源滤波器控制方法,分析采用瞬时无功功率理论的谐波电流检测法,推导出检测负荷谐波和基波无功电流方法,通过有源和无源滤波器相结合,利用双滞环矢量控制方法,控制无源滤波器组数,实现精确补偿负荷谐波和基波无功电流。该方法能够有效减小线损与电压损失,文献[3]提出级联H 桥有源电力滤波器直流侧电压失衡分层控制方法,首层是均衡有功指令电流跟踪和相间电压,底层是控制相内各H 桥模块电压均衡,实现相间和相内电压均衡控制。该方法能够有效实现均衡控制,但现有技术在实际应用中存在相互干扰严重、控制误差大、响应慢等问题。DSP 是一种数字信息处理技术,利用DSP 技术制备的数字信号处理器,具有可编程性,并且比其他处理器的速度更快。同时,DSP 本质上属于微处理器,其主要用于对数字信号的有效处理,DSP 是数字信号处理技术与实际应用的结合产物,进一步推动了数字信号处理技术发展的同时,还拓展了数字信号处理技术的应用领域,由于其具有数字信号处理效率、精度高等优点,已经被广泛应用于多个领域中。因此,在对谐振注入式有源滤波器数字双环控制方法进行设计时,引入DSP 技术,针对现用控制问题提出优化后的控制方法。
1 谐振注入式有源滤波器应用原理
谐振注入式有源滤波器通常采用基波分压或电流旁路的方式,将串联在注入支路当中的滤波器不会承受基波电压以及基波电流,从而实现对滤波器容量的降低效果。谐振注入式有源滤波器中,有源部分分别与基波谐振支路以串联或并联的形式连接,其基本结构如图1 所示。
图1 中L0表示为平波电路;A 表示为逆变器;B 表示为注入电容;C 表示为注入支路;D 表示为基波谐振支路。从图1 谐振注入式有源滤波器的整体结构可以看出,该装置在实际应用中,既可以实现对谐波的治理,同时又可以根据情况进行无功功率的补偿,保证电力设备的稳定运行。
谐振注入式有源滤波器的控制方式主要是通过对逆变器的调节实现,通常情况下逆变器可以将其等效为一个电压电源[4]。在滤波器装置中存在多个电感、电容等无源元件,而通过无源元件的引入,可以有效提升滤波器的整体阶数,从而使得对其进行控制时难度进一步提升,控制参数无法确定。

图1 谐振注入式有源滤波器基本结构图
2 基于DSP 的谐振注入式有源滤波器数字双环控制方法
2.1 谐振注入式有源滤波器最大功率点跟踪
由于在不同运行环境下,电力设备的输出电压工作条件不同,因此谐振注入式有源滤波器的控制量存在较大差异。在对谐振注入式有源滤波器数字双环控制前,应当明确其最大功率点,并对其最大功率点进行实时的跟踪[5]。当控制到某一固定位置时,滤波器才能在允许条件下,实现对电力设备的电源最大输出功率,即最大功率点。通过对最大功率点的跟踪,可初步实现对谐振注入式有源滤波器的协调控制。本文采用扰动法对最大功率点进行追踪。首先,对谐振注入式有源滤波器电源的输入电压实施一个变化的量,并在输入电压变化过程中测量电源的电压与电流[6]。其次,根据实际测量得到的数据对电源的输出功率进行计算,将新的输出功率与变化之前的输出功率测量值进行对比,根据对比结构完成对滤波器工作点的控制调节。
通常情况下,在电力设备运行过程中,电网当中的电力设备需要在短时间内处于孤岛运行状态,滤波器此时不对直流母线电压进行控制。由于电网通常采用直流负载额定电压为440 V,而直流母线电压为500 V,结合最大功率点跟踪结果[7]。在对谐振注入式有源滤波器控制前,首先应当对直流母线电压进行处理,待直流负载额定电压降低到440 V 后,再转换为恒压数字双环控制。
2.2 基于DSP 的离散化数字双环控制信号采集与处理
在对谐振注入式有源滤波器控制信号进行采集时,由于监测频带较宽,需要划分大量的子带,导致通道之间存在不匹配问题[8]。因此,本文结合小波的采集方法,对数字信号进行采集和处理。首先利用计算机处理测量到的连续时间信号,离散处理连续时间信号,转化为以离散形式表现的时间信号,再利用YI数字编程软件将离散信号量化、编码成数字信号,以此获得的数字信号可以通过卫星通道、光纤、电缆、微波干线等数字线路进行传送,将一个低速率信号采样指令分配到每一个子带,利用子带换取动态范围的提升,提高小信号采集的量化精度。
完成对滤波器离散化数字双环控制信号采集后,结合DSP 技术对信号进行处理。根据滤波器特定的滤除工作和功能,处理过程中主要涉及的设备及装置包括:单片机、D/A 转换器、自动增益控制电路等,其具体组成形式如图2 所示。
利用DSP 技术将信号连续降半分割到相应的层上,将滤波器看作一个半带滤波装置,把测量到的距离结果以4~20 mA 模拟电流的形式传送到电脑控制界面,根据该电流的大小判断所测的距离结果。再利用D/A 转换器将测量结果的数字码转换成模拟信号,并通过D/A 转换器生成对应12~24 mA 范围内的模拟电流,并将该数据传输到上位机的控制界面当中[9]。通常情况下,电网电流具有较大的变化率,有源滤波器的补偿误差最大和最小之间形成脉动。通过上述分析得出,谐振注入式有源滤波器输出的补偿电流平均滞后时间计算公式为

图2 离散化数字双环控制信号处理流程图

式(1)中, Td_max表示为补偿电流平均滞后时间; Tp表示为最大延迟时间; Tb表示为最小延迟时间。根据公式计算得出,当离散化数字双环控制信号采集频率为15.5 kHz,并且信号采样与信号处理的时间为42 μs,Tp取值为100 μs, Tb取值为42 μs,其平均延时可达到71 μs。而当DSP 数字信号处理器的采集频率进一步降低时,平均延时将会不断增加,因此,延时越长,平均补偿误差越大。
2.3 谐振频率控制补偿策略
在采用上述方法完成对控制信号的处理后,针对控制信号的变化提出相应的谐振频率控制补偿策略。将上述离散后的控制信号引入到离散域传递函数当中,其函数表达式为

式(2)中, g ( p) 表示为离散域传递函数;h 表示为谐波次数;nw 表示为基波角频率;mw 表示为数字双环输出的电网电压实际角频率。由于滤波器的谐振频率是随着电网的实际运行频率发生不断变化的,因此在电网频率波动的过程中仍然能够保证一定的谐振控制效果[10]。通过将每一个谐振滤波器与数字锁相环输出的电网实际角频率关联,不断更新控制极点的数值,使电网频率始终能够保证其与谐振的频率匹配,达到对谐振频率控制补偿的效果,在兼顾控制效果的同时,提高控制方法的易用性,因此完成基于DSP 的谐振注入式有源滤波器数字双环控制。
3 实验结果分析
为进一步验证本文提出的基于DSP 的谐振注入式有源滤波器数字双环控制方法的可行性,进行对比实验。实验选择某工业生产厂中常见的风机作为滤波器进行滤波操作的电力设备。风机的功率大小为16.5 kW,光伏电池总功率大小为36 kW,储能电池容量大小为20 kW,母线电压为300 V。实验中分别将电力设备运行功率加大5.50 , 6.00, 7.50, 8.00, 9.50, 12.50, 15.50, 17.50, 19.50, 25.50 kW,利用设备方法通过对有源滤波器数字双环控制,控制电力设备稳定运行,实验过程中利用电子表格分别记录文献[2]、文献[3]和本文控制方法应用后,滤波器控制功率数值,将其与实际需求对比,计算出控制误差,将其作为实验结果,完成对比实验,并将实验结果记录如表1 所示。
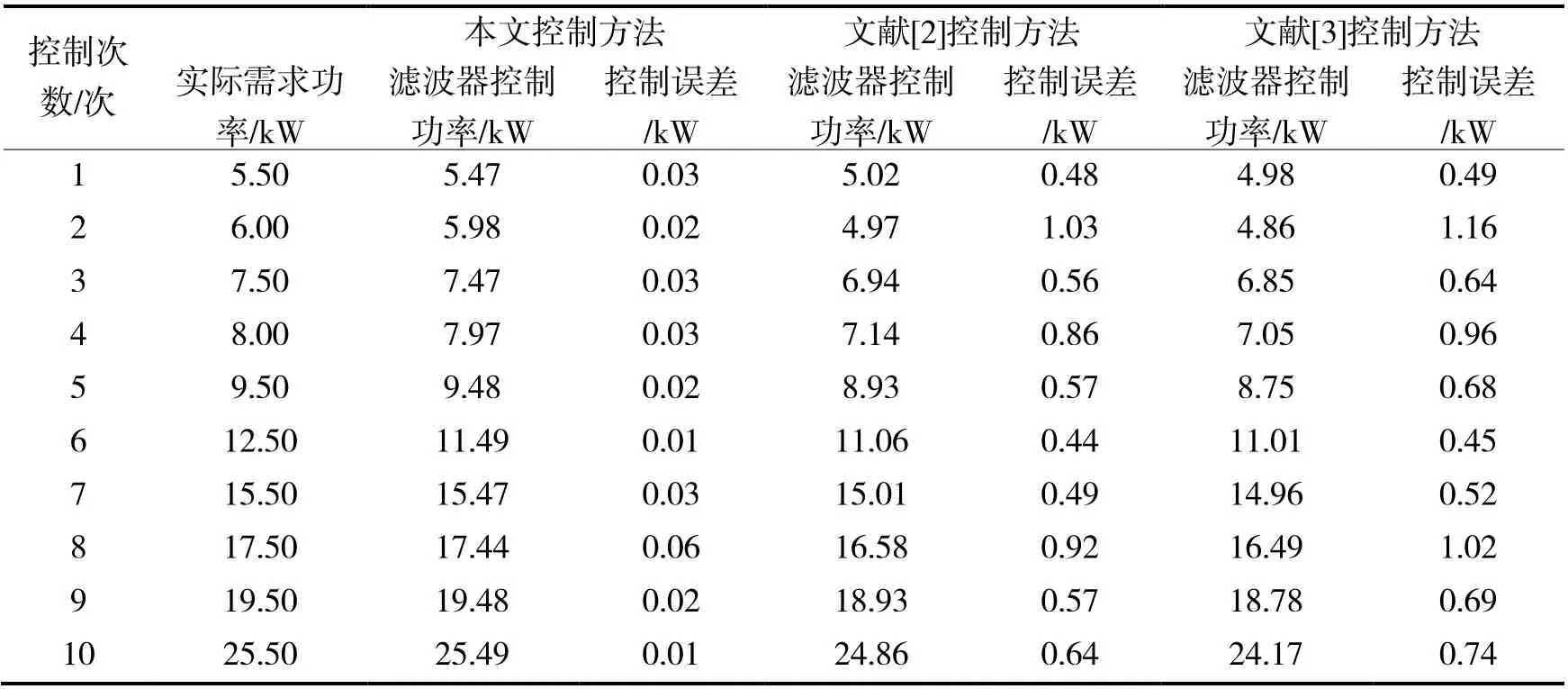
表1 实验组与对照组实验结果对比表
由表1 中的数据可以看出,本文控制方法在对谐振注入式有源滤波器进行数字双环控制后,得到的电源功率与实际需求功率相比,控制误差在0.02~0.06 kW 之间,最大控制误差仅为0.06 kW,平均控制误差为0.03 kW;文献[2]控制方法最小控制误差为0.48 kW,最大控制误差可达到1.03 kW,平均控制误差为0.67 kW;而文献[3]控制方法最小控制误差为0.45 kW,最大控制误差可达到1.16 kW,平均控制误差为0.74 kW。根据研究过程得出,基于DSP 的谐振注入式有源滤波器数字双环控制方法精度更高的原因为:由于在对滤波器进行控制时,可根据控制结果对控制信号进行实时调节,充分保证有源滤波器数字双环控制信号的平稳,进一步实现对风机的精度控制。因此,通过对比实验证明,本文提出的基于DSP 的谐振注入式有源滤波器数字双环控制方法控制精度更高,相比于当前控制方法更适用于有源滤波器数字双环控制,具有较高的可行度和可行性,能够满足电力企业各类电力设备的运行需要,为电网的稳定运行提供条件,实现对电力设备全天候高精度控制。
4 结束语
本文针对谐振注入式有源滤波器数字双环控制方法进行研究,提出基于DSP 的谐振注入式有源滤波器数字双环控制方法,并通过实验证明了该方法的可行性。在实际应用中,由于谐振注入式有源滤波器整体结构复杂,加之DSP 数字信号处理器的引入,使得控制难度增加,对于多谐振滤波器而言,该控制方法仍然存在一些问题。因此,在后续的研究中,还将针对多谐振类型的滤波器的控制对本文方法进行优化,从而提高本文方法的应用与推广。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
科学导报(2022年41期)2022-07-13
客联(2022年4期)2022-07-06
安徽农学通报(2022年8期)2022-05-06
能源工程(2021年5期)2021-11-20
家庭影院技术(2021年9期)2021-11-05
电子制作(2019年7期)2019-04-25
电子制作(2018年2期)2018-04-18
家用汽车(2016年12期)2017-02-09
燕山大学学报(2015年4期)2015-12-25