船用控制手柄多电机同步控制技术
2021-04-12 01:44中电科宁波海洋电子研究院有限公司连雪海
电子世界 2021年5期
中电科(宁波)海洋电子研究院有限公司 连雪海
宁波财经学院 马 勰
浙大宁波理工学院 胡可威
中电科(宁波)海洋电子研究院有限公司 徐 峰
宁波财经学院 张威巍
浙大宁波理工学院 白 杰 马修水
船舶工业是现代综合性产业之一,为国防建设、海洋资源开发和水上交通运输等行业提供相应的技术装备,产品技术密集,产业链长,可以对海洋资源勘采、机电设计制造、材料及航运等上、下游产业发展起到带动作用。船用控制手柄是一种用于远程操纵的船用控制设备,是船舶自动化、信息化中重要组成部分,广泛应用于船舶推进系统、港口机械、液压控制等领域。目前,国内船舶控制手柄与国外先进水平相比还存在一定的差距,高端市场由国外知名品牌垄断,且装船使用的控制手柄以普通型为主,高端产品如随动型、主从控制型较少,价格昂贵,且国外进口产品供货周期长,运维服务不方便。为了提高我国船舶工业水平,国内相关企业开展船舶控制手柄的研制,但起步较晚,产业化企业少,且大多数适用国内低端的船舶市场,急需技术提升。
多电机同步控制是船用控制手柄研发及产业化核心技术之一,该技术已经在造纸业、印刷业、工业机器人以及工业生产线等领域得到了广泛应用。在船用控制手柄的开发中,多手柄之间构成了多电机同步控制系统,手柄之间同步控制是技术难点之一。早期的多电机同步控制系统一般采用非耦合控制方式,控制策略主要针对单个电机,对各个电机的控制是由相对独立的速度控制器、位置控制器等实现。在无扰动情况下,控制系统具有良好的同步性,但是,一旦系统受到外界的干扰,系统调整困难,会造成多电机同步控制系统失去同步。耦合控制是一种将同步误差和跟踪误差反馈给控制器进行控制的方法,由于减小了同步误差和跟踪误差,耦合控制在多电机同步控制系统中应用越来越广泛。本文结合企业的研发实际,主要介绍船用控制手柄并行控制、主从控制、交叉耦合控制、偏差耦合控制等多电机控制技术,以及与其相关的数字滤波技术。
1 船用手柄多电机同步控制技术
1.1 并行控制
并行控制原理如图1所示,是最基础的多电机同步控制,属于非耦合控制,系统中每台电机之间没有耦合关系,当系统运行时,若某一台电机受到外界的扰动,会导致控制系统的严重失调。
1.2 主从控制
为了增强多电机控制系统中电机之间的耦合性,当被控电机超过两台时,设计主从控制可以弥补并行控制的缺陷。主从控制可分为一主多从结构和多主多从结构。图2为一主多从结构,主电机的转速波动及时传递给各台从电机,从电机读取主电机信息,按照设计的控制算法调整从电机的转速。一主多从控制系统只能适应主电机的转速波动,无法对从电机转速的波动做出反应。多主多从结构控制系统电机之间具有耦合关系,图3为两主多从控制系统结构图。图中,相邻的两台电机其中一台为主电机另一台为从电机,控制系统中各台电机之间具有耦合关系,每台电机可能既是主电机也是从电机。
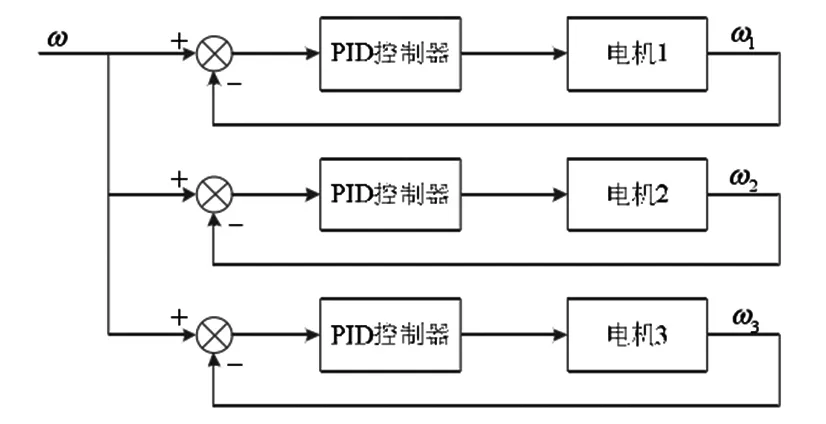
图1 并行控制结构图

图2 一主多从控制系统结构
1.3 交叉耦合控制
1980,Y.Koren针对双轴运动平台提出了交叉耦合同步控制方法,交叉耦合控制结构不分主从电机,如图4所示,取控制系统中两台电机的实时转速信号差值作为补偿量分别对两台电机进行补偿,通过耦合作用和控制相对运动参数实现同步控制。图4中,综合考虑了控制系统中两台电机之间的相互影响,通过软硬件协调,设计解耦算法,减少时延,保障系统的同步。交叉耦合控制结构适用只有两台电机的被控系统,对于三台及以上电机的控制系统不适用。

图3 两主多从控制系统结构
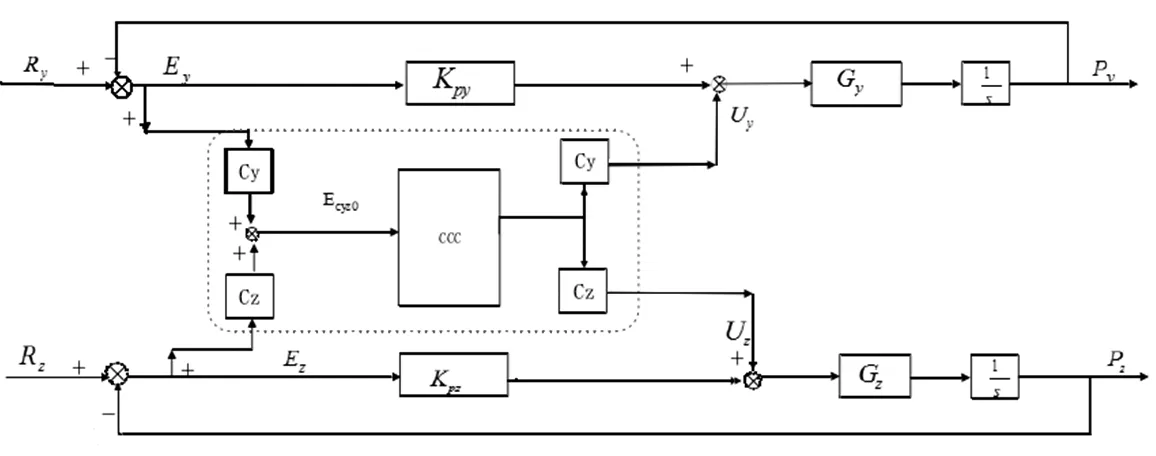
图4 交叉耦合控制结构
1.4 偏差耦合控制
基于交叉耦合控制不能适应3台以上电机同步控制系统控制问题,对于3台及以上电机的同步控制,在交叉耦合控制的基础上改进完善,研发了偏差耦合控制。偏差耦合控制原理如图5所示,图中,3台电机速度给定值是相同的,根据每台电机的运行状态进行相应的补偿,偏差耦合补偿信号是由1台电机的反馈与其他2台电机反馈偏差乘以相应的增益之和得到控制器的输入信号。

图5 偏差耦合控制结构
偏差耦合控制系统,当负载扰动等因素引起电机1的速度波动时,系统中另外2台电机也会受到电机1波动的影响,其速度也会相应地变化,其反馈信号作为速度补偿器1的输入,再与给定、电机1的转速反馈求和比较,得出偏差信号作为控制器1的输入,控制器1在设计的控制规律下调节电机1的转速;同理,当电机2或3转速波动时,通过偏差耦合,实现速度调节。因此,系统在启动和停止阶段也具有良好的同步性能。偏差耦合控制主要不足是:其他电机的跟随误差以及互相间的速度不同步信号,没有反馈给所控制的电机。因此,当其他电机出现较大的跟随误差时,控制系统的过渡过程较慢,造成系统同步性能的下降,需要研发更加合适的控制方式。
2 数字滤波技术
在航用手柄多电机控制系统中,不可避免会产生很多随机干扰信号,如各种电器噪声干扰等。在船用控制手柄的设计过程中,还需要考虑采集传感器数据时引入的噪声和干扰,同时,还要考虑在船舶航行时会受到海浪冲击,产生手柄的振动也会具有随机干扰,随机干扰不能通过一个确定的数学模型来描述,也不能准确地预测,可通过统计规律进行分析和研究。
对于随机干扰,可以用数字滤波的方法削弱或者消除。所谓数字滤波就是通过一定的计算或判断程序减少干扰信号在有用信号的比重,因此数字滤波实际是通过软件进行滤波。
目前常用的数字滤波算法有:
(1)算术平均滤波;(2)加权平均滤波;(3)滑动平均滤波;(4)中值滤波;(5)一阶滞后滤波;(6)加权递推平均值滤波。
数字滤波技术能够很好地过滤传感器采集时产生的噪声,让采集到的传感器数据更加具有准确性,有利于电机的闭环控制。
3 小结
综上所述,船用手柄多电机同步控制技术可以归纳为以下几点:
(1)提高跟踪精度。跟踪精度是系统综合性能评定的重要指标,需要不断利用计算机软硬件最新的技术、优化控制和信号处理算法,不断提高控制系统的跟踪精度,满足多电机同步控制的运动协调性。
(2)提高实时同步性。在实际应用场合,提高抗干扰能力是控制系统稳定性的最基本要求。在船舶系统恶劣的工作环境下,控制参数发生漂移是不可避免的,提高多电机同步控制系统的鲁棒性、保证系统实时的动态同步性是值得研究的内容。
(3)提高动态响应速度。动态响应时间是多电机同步控制系统的重要性能指标,在实际控制系统中,不但要动态响应速度快,减小过渡过程时间,而且还要超调小甚至无超调。
(4)改善负载特性。优化控制策略和算法,提高多电机同步控制系统控制参数的适应性,保证系统的同步性在负载变化时影响较小。
(5)提高可靠性和稳定性。设计多电机同步控制系统硬件和软件时,除了必须满足功能要求外,还必须在抗干扰设计、三防设计等方面满足系统可靠性和稳定性需要。
猜你喜欢
电子制作(2019年24期)2019-02-23
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年2期)2017-05-04
现代电子技术(2016年15期)2016-12-01
电测与仪表(2016年24期)2016-04-12
探测与控制学报(2015年4期)2015-12-15
物联网技术(2015年10期)2015-11-10
舰船科学技术(2015年8期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
现代电子技术(2014年12期)2014-06-30