基于上下文感知与自适应响应融合的相关滤波跟踪算法
2021-04-12 10:13谢煜,黄俊,李旭
小型微型计算机系统 2021年4期
谢 煜,黄 俊,李 旭
(重庆邮电大学 通信与信息工程学院,重庆 400065)
1 引 言
目标跟踪是计算机视觉领域中一个重要的研究方向,同时它也是许多高级计算机视觉任务的基础.随着近年来国内外专家学者的深入研究以及计算机图像处理能力的不断提升,目标跟踪技术快速发展,并在视频监控、人机交互、无人驾驶、军事国防等多个领域有着广泛的应用.尽管当前目标跟踪技术的研究取得了不小的进展,但由于跟踪过程中往往存在光照变化、运动模糊、背景干扰、目标形变等复杂因素,容易导致算法跟踪失败,因此设计一种精确度高、鲁棒性好的目标跟踪算法仍是一个巨大的挑战.
目标跟踪的任务是根据视频序列的第一帧给定的目标初始状态信息(例如目标的位置和大小),通过一系列算法估计出在后续的视频序列中目标的状态[1].目标跟踪方法主要分为两类:生成式模型方法与判别式模型方法.生成式模型方法是通过在当前视频帧中构建所要跟踪的目标的外观模型,在下一视频帧当中搜索与所构建的外观模型最相似的区域来预测目标的位置.判别式模型方法是通过训练一个判别模型并不断更新,从而将目标与背景区域区分开来以预测目标的位置.相较于生成式模型方法,判别式模型方法利用了背景信息,具有更高的精确性与鲁棒性,能够更好地实现目标跟踪,因此判别式模型方法成为近年来的研究热点.
相关滤波类目标跟踪算法属于判别式模型方法的一种,通过将信号处理领域的信号相关性理论引入到目标跟踪领域,使其在具备较高精度的同时,大幅减少运算量,提高算法速度,受到了广泛关注[2].Bolme等[3]首次将相关滤波应用于目标跟踪领域,提出了MOOSE跟踪算法,其利用快速傅里叶变换(FFT)将时域的卷积计算转换到频域的点乘计算,相较于其它目标跟踪算法,跟踪速度大幅提升,但由于其训练样本有限,算法鲁棒性较差.Henriques等[4]在MOOSE算法的基础上进行改进提出了CSK算法,它通过循环移位的方法模拟密集采样,获得大量训练样本,解决了MOOSE算法中训练样本不足的问题,提高了算法的鲁棒性,同时利用循环矩阵对角化的特性提高算法速度,但由于CSK算法仅使用了简单的灰度特征,跟踪效果较为一般.之后,Henriques等[5]又提出了KCF算法,将滤波器的单通道灰度特征扩展为多通道HOG特征,并将线性空间的岭回归通过核函数映射到非线性空间,从而大大提升了跟踪效果.Possegger等[6]提出了基于统计颜色特征的DAT算法,使得跟踪算法能够对物体形变具有较好的鲁棒性.Bertinetto 等[7]提出Staple算法,将HOG特征与颜色直方图特征进行结合,由于HOG特征对物体形变较为敏感,但对光照变化具有较好的鲁棒性,而颜色直方图特征则对颜色较为敏感,但对物体形变较为鲁棒,因此二者可以进行互补,使用多特征得到的融合跟踪结果提升了算法的精度与鲁棒性.
尽管上述工作取得了不错的跟踪效果,但仍存在以下问题:由于搜索区域的限制以及边界效应的影响,在背景干扰、快速运动等情况下算法的跟踪精度下降.并且上述工作中对不同特征的响应图进行融合时仅采用了固定权值的加权融合方法,在低分辨率、运动模糊等情况下的跟踪效果不佳.同时,在模型更新策略上往往采取的是每帧或间隔几帧进行简单线性插值的更新方式,使得判别模型容易过拟合,从而导致模型漂移.
针对上述问题,本文提出采用上下文感知技术,通过对目标搜索区域周围的上下文图像块进行采样并作为正则项,使得判别模型对上下文图像区域有接近于零的响应,从而增强算法在背景干扰情况下的鲁棒性.针对HOG特征和颜色直方图特征二者响应图和响应值的特点,采用自适应响应融合方法对不同特征的响应图进行融合,使得融合后的响应图能够更精确地指示预测的目标位置,提高算法在低分辨率和快速运动等场景下的跟踪精度.最后,使用高置信度模型更新策略进行模型更新,动态调整模型学习率以减少模型漂移的情况.
2 相关滤波跟踪算法原理
相关滤波跟踪算法通过学习一种判别相关滤波器,该滤波器能够在包含目标和背景的图像区域中判别出目标区域,通过不断学习更新该滤波器,并与感兴趣的图像区域进行相关操作得到响应图,最后根据响应图中的最大响应位置来推断目标的位置.其中,判别相关滤波器的学习对于相关滤波跟踪算法性能至关重要,而样本的数量及质量对学习到的判别相关滤波器的精度和鲁棒性影响重大.相关滤波跟踪算法通过使用循环矩阵对单一训练样本进行循环移位来模拟密集采样,以获得大量训练样本,并利用循环矩阵对角化的性质来加速运算.
定义x∈Rn表示第1帧中的训练样本,其中n为维数,Px=[xn,x1,…,xn-1]表示x的1个循环移位,其中P是位移矩阵.连接所有可能的循环移位样本的集合,形成一个循环矩阵,该循环矩阵也称为数据矩阵.相关滤波跟踪算法通过最小化下面的岭回归问题来求解滤波器w:
(1)
式中X为包含训练样本x的所有循环移位的数据矩阵,y为目标的期望输出,通常选择二维理想高斯响应作为期望输出,λ1为控制过拟合的正则化参数.公式(1)有如下封闭解:
w=(XTX+λI)-1XTy
(2)
由于数据矩阵X具有循环结构,因此它可以进行对角化,从而可以更高效地进行矩阵求逆运算.数据矩阵X的对角化形式如下:
(3)

(4)

α=(XXT+λI)-1y
(5)
则公式(1)在对偶空间中的解α与在主空间中的解w的关系如下:
w=XTα
(6)
利用数据矩阵X的对角化性质同样可以得到α在傅里叶形式下的解:
(7)
得到滤波器w后,在下一视频帧中提取目标搜索区域新的图像特征Z,与滤波器进行相关操作可以得到主空间响应图rp或对偶空间响应图rd:
(8)
(9)
式中Z为循环矩阵,z为Z在循环移位前的原始样本.根据响应图中的最大响应位置确定在该视频帧中预测的目标位置.同时,为了使判别模型对跟踪过程中目标出现的外观与形态变化更具鲁棒性,需要对滤波器进行更新,通常使用线性插值的方式来进行更新:
αt=(1-η)αt-1+ηαt
(10)
式中t为当前视频帧的序号,η为模型更新的学习率.
3 本文相关滤波跟踪算法
3.1 上下文感知
在现实跟踪场景中,跟踪目标的周围区域往往存在各种干扰物体,这些干扰物体由于与跟踪目标相似或与跟踪目标交叠导致模型漂移或跟踪失败.相关滤波跟踪算法由于使用了循环移位来模拟密集采样而使得循环样本存在边界效应,尽管大多数相关滤波跟踪算法通过应用余弦窗来减轻边界效应的影响,但与此同时也丢失了部分背景信息,从而降低了跟踪算法的判别能力[8].因此,通过充分利用跟踪目标周围的上下文信息,使跟踪算法具备上下文感知的能力,对提升算法的精度和鲁棒性有着重要意义.
对于相关滤波跟踪算法中的判别模型而言,跟踪目标周围的上下文图像区域可以视为负样本,通过对上下文图像区域进行采样作为负样本用于对判别模型进行训练更新能够使得判别模型对背景干扰物体具有更好的鲁棒性.在公式(1)的基础上,可以将在跟踪目标周围采集的上下文图像区域作为正则项添加其中,使得学习到的滤波器w能够对目标区域有着较高的响应,而对上下文图像区域有着趋近于零的响应.加入上下文区域图像作为正则项的岭回归问题如下:
(11)
式中X0是包含目标的训练样本所有循环移位的数据矩阵,Xi是各个上下文训练样本所有循环移位的数据矩阵,λ2是控制上下文图像区域响应回归到0的正则化参数.
通过将上下文图像块与目标区域图像块进行堆叠形成新的数据矩阵B∈R(k+1)n×n,其中k为采集的上下文图像块数目,公式(11)可改写为公式(12):
(12)
其中:
(13)
类似于公式(2)和公式(5),公式(12)在主空间(Primal Domain)及对偶空间(Dual Domain)有以下封闭解:
(14)
(15)
利用具有循环结构的数据矩阵B的对角化性质可以得到滤波器w在主空间(Primal Domain)的傅里叶形式的解:
(16)
在对偶空间(Dual Domain)中,类似于公式(7)可以得到傅里叶形式下的解如下:
(17)
其中,向量djl(j,l∈{1,…,k})分别为:
(18)
从而可以在下一视频帧图像中获取目标搜索区域的响应:
(19)
3.2 自适应响应融合
不同的图像特征有着不同的特性,因此它们在不同的跟踪场景下的特征表观能力也有所差异.例如,HOG特征统计图像局部区域的梯度方向直方图,因此在光照变化和平面旋转等场景下能够保持对目标特征的良好表达,而对目标形变则较为敏感;颜色直方图特征统计不同颜色在图像区域中的分布,因此光照变化会对颜色直方图特征产生较大影响,而其对目标形变则较为鲁棒.目前已有相关工作,如SAMF算法、Staple算法等,将不同特性的特征进行互补,通过分别计算图像在不同特征下的响应,再进行响应融合得到最终的响应图,从而确定预测的目标位置.在响应融合的方式上,当前较为先进的算法通常采用了固定权值进行加权融合的方法[9,10],这种方法虽然计算较为简单,但无法灵活地应对不同类型的视频序列中的跟踪场景差异.通过研究发现,在低分辨率以及快速运动等场景下采用固定权值进行加权融合得到的响应图往往不够可靠,容易导致模型漂移.因此本文提出一种自适应响应融合的方法,提升响应融合的可靠性.
本文所提出的算法使用了HOG特征和颜色直方图特征进行互补,并对目标区域图像在二者特征下的响应采用自适应加权融合方法来进行响应融合,得到最终的响应.定义由HOG特征计算得到的响应为fh(x),由颜色直方图特征计算得到的响应为fc(x),则采用传统固定权值的加权融合方法得到最终响应f(x):
f(x)=(1-γ)fh(x)+γfc(x)
(20)
式中γ为响应融合的固定加权融合因子.
通过对采用固定权值的加权融合方法进行响应融合的跟踪算法进行分析,本文发现其往往在快速运动、背景相似干扰以及图像低分辨率等情况下出现跟踪失败的情形.通过分析视频序列中在出现跟踪失败时计算得到的HOG特征响应、颜色直方图特征响应以及采用固定权值加权融合后的最终响应之间的关系,本文发现,颜色直方图特征在上述跟踪情形中相较于HOG特征更为敏感,无法可靠地对目标外观进行表观,同时由于颜色直方图特征的响应值较HOG特征响应值更高,且波动范围小,导致采用固定权值加权融合后的响应受颜色直方图特征的影响较HOG特征的影响更大.基于上述发现,本文提出以下自适应调整加权融合因子的响应融合方法:计算HOG特征响应最大值rh-max和颜色直方图特征响应最大值rc-max:
rh-max=max(fh(x))
rc-max=max(fc(x))
(21)
记HOG特征响应图中最大响应rh-max所处的位置为(posh-row,posh-col),颜色直方图特征响应图中最大响应rc-max所处的位置为(posc-row,posc-col),分别在HOG特征响应图和颜色直方图特征响应图中计算以下位置的响应值:
rh=fh(posc-row,posc-col)
rc=fc(posh-row,posh-col)
(22)
HOG特征响应图中最大响应位置(posh-row,posh-col)和颜色直方图特征响应图中最大响应位置(posc-row,posc-col)分别描述了HOG特征及颜色直方图特征所预测的可能性最大的目标位置区域.在二者特征都能够较好地对目标进行表观的情况下,响应值rh与最大响应值rh-max的比值以及响应值rc与最大响应值rc-max的比值较大且相对稳定,此时可以使用正常情况下的加权融合因子γ2进行响应融合.而对于快速运动、背景相似干扰以及图像低分辨率等情形,此时颜色直方图特征的可靠性不佳导致在干扰区域仍然有着较大的响应,而对上述跟踪情形较为鲁棒的HOG特征则能够保持对目标外观的良好表达,使得在干扰区域有着较低的响应,从而与颜色直方图特征的响应比值呈现差异.通过分析HOG特征响应图和颜色直方图特征响应图的波动范围,设置比例阈值条件来指示出现颜色直方图特征响应不可靠的情形,并在满足相应条件时调低加权融合因子的大小,减少颜色直方图特征对最终融合响应的影响,自适应调整加权融合因子的响应融合公式如下:
(23)
式中ρ1,ρ2为设定的比例阈值,γ1,γ2为不同的加权融合因子,且γ1<γ2.根据公式(23),跟踪算法在出现颜色直方图特征响应不可靠的情况下降低颜色直方图特征响应权重,提高HOG特征响应权重,并在二者响应均较为可靠时恢复原始的加权融合因子,实现二者特征响应自适应融合的效果,提升了跟踪算法的精度和鲁棒性.采用固定权值的响应融合方法与本文的自适应响应融合方法的响应图及跟踪结果对比如图1所示.
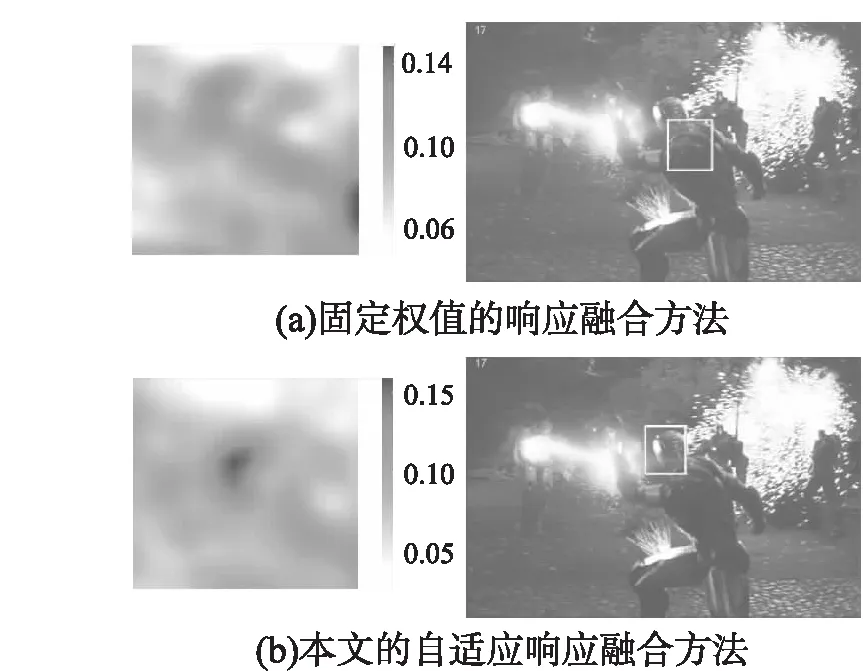
图1 两种响应融合方法的响应图及跟踪结果对比Fig.1 Comparison of response maps and tracking results of two response fusion methods
3.3 高置信度模型更新策略
为了适应目标在跟踪过程中可能出现的不同形态变化,相关滤波跟踪算法需要利用当前视频帧中提取的图像作为训练样本对判别模型进行更新.大多数现有的相关滤波跟踪算法采取的策略是在每一帧中以固定的学习率对判别模型进行更新[11],这种模型更新策略较为简单且计算方便.文献[9]中认为在每一帧进行模型更新的策略会拖累跟踪算法的速度,并且有导致模型过拟合的风险,因此采用了每间隔5帧进行模型更新的策略.然而,不论是每帧更新的策略还是间隔更新的策略,都忽略了用于模型更新的训练样本的质量对更新模型的影响.当出现目标严重遮挡或是完全丢失时,此时用于模型更新的训练样本仅包含较少甚至不包含目标的外观信息,若将这些训练样本用于模型更新将导致模型污染,误差不断累积后最终会导致跟踪失败.
为了解决上述问题,本文使用响应峰值(Fmax)和平均峰值相关能量(APCE)[12]作为置信度指标,只有在两个置信度指标均满足高置信度更新条件时才对模型进行更新.跟踪过程中采样的训练样本对应的响应图能够反映出训练样本的质量.理想的响应图通常具有一个较高的尖峰,并且在其它区域都较为平滑,这样的响应图被认为能够较好地对目标位置进行定位,其所对应的训练样本良好地表达了目标外观,适合用于模型更新.与之相反的是,若一个响应图中具有多个峰值,并且响应图中的其它区域剧烈振荡,则可能发生了遮挡或背景干扰,这样的响应图所对应的训练样本被认为质量不佳,用于模型更新可能会导致模型污染.本文所参考的两个置信度指标:Fmax和APCE能够反映当前训练样本的质量,为模型更新策略提供参考.Fmax反映了响应图中的最大峰值的尖锐程度,APCE则反映了响应图的整体振荡情况,APCE定义如下:
(24)
式中Fmax与Fmin是响应图中的最高和最低响应,Fm,n是响应图中位置(m,n)上的响应.Fmax的值越大表明响应图的最大峰值越尖锐,APCE的值越大表明响应图的周围越平滑,通过判断两个置信度指标均以一定比例大于其历史均值可以反映出当前跟踪结果具有较高的置信度.本文的高置信度模型更新策略需满足以下置信度条件才可进行模型更新:
(25)
式中Fi,max和APCEi表示视频序列第i帧中的最大响应峰值和平均峰值相关能量.
3.4 算法流程
本文算法流程如下:
初始化:根据第一帧中跟踪目标的初始位置及大小进行图像采样并提取上下文图像区域,用于初始化位置滤波器和尺度滤波器.
位置预测:
步骤1.根据上一帧的目标位置及大小对图像区域及上下文图像区域进行采样,并提取HOG特征和颜色直方图特征.
步骤2.根据公式(17)计算跟踪滤波器的目标模型参数.
步骤3.根据公式(19)计算目标及上下文区域的HOG特征响应图以及颜色直方图特征响应图.
步骤4.根据公式(23)对HOG特征响应图与颜色直方图特征响应图进行自适应响应融合得到最终的响应图,并根据响应图中最大响应位置确定预测的目标位置.
尺度估计:
步骤5.以步骤4确定的目标位置为中心提取多个不同尺度下的目标图像并提取特征.
步骤6.计算不同尺度下的尺度响应从而确定当前帧的最佳尺度因子.
模型更新:
步骤7.使用高置信度更新策略进行模型更新,计算当前帧的Fmax与APCE,判断是否满足公式(25)条件.若满足,则更新位置滤波器和尺度滤波器参数.若不满足,则不进行模型更新.
4 实验分析
4.1 实验环境及参数设置
本文中实验环境的计算机配置为Intel Xeon CPU E5-2670,主频为2.6GHz,内存为16GB,算法的软件开发平台为MATLAB R2018b,操作系统为Windows 10.本文算法使用HOG特征及颜色直方图特征,算法的具体参数设置如下:提取目标周围8个方向的上下文图像块,正则化参数λ1的值为10-3,控制上下文信息的正则化参数λ2的值为0.5,自适应响应融合中的比例阈值ρ1为0.2,ρ2为0.8,响应融合的加权融合因子γ1为0.05,γ2为0.2,使用了尺度步长为1.02的33个尺度进行尺度估计,尺度滤波器的相关参数设置与DSST[13]算法中的参数配置相同,高置信度模型更新策略中Fmax的比例阈值β1为0.35,APCE的比例阈值为0.7.
4.2 数据集及评价指标
本文选取了OTB50标准公开数据集[14]对本文算法进行全面地评估.OTB50数据集涵盖了众多不同跟踪场景下的视频序列,并且按照不同的跟踪挑战因素划分了11种属性,包括:尺度变化(SV),快速运动(FM),运动模糊(MB),目标形变(DEF)、出视野(OV),平面内旋转(IPR),平面外旋转(OPR),背景杂波(BC),光照变化(IV),低分辨率(LR)以及遮挡(OCC),每个视频序列都至少包含一种上述属性.
本文使用中心位置误差(CLE)、距离精度(DP)以及重叠精度(OP)3种评价指标对算法的跟踪结果进行度量.中心位置误差(CLE)是指预测的目标中心位置与真实的目标中心位置之间的平均欧几里得距离.距离精度(DP)是指视频序列中CLE小于某个阈值的帧数占视频序列全部帧数的百分比.重叠精度(OP)是指视频序列中预测的目标区域与真实的目标区域的重叠率超过某个阈值的帧数占视频序列全部帧数的百分比.
4.3 定量分析
本文选取了5种当前较为先进的相关滤波跟踪算法与本文算法在OTB50数据集上进行对比实验,这些算法包括:KCF、DSST、Staple、SRDCF[15]、SAMF_CA[16].本文采用一次性通过评估(OPE)的测试方式,使用距离精度曲线图和成功率曲线图来显示跟踪算法的跟踪性能.其中,距离精度曲线图以CLE阈值为20个像素时的DP评价指标分数对跟踪算法进行排名,成功率曲线图以重叠率阈值为0.5时的OP曲线的曲线下面积(AUC)对跟踪算法进行排名.上述所有算法在一次性通过评估(OPE)方式下进行实验得到的距离精度曲线图与成功率曲线图如图2所示.
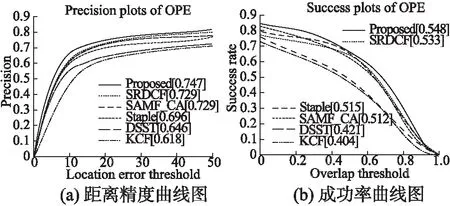
图2 6种算法在OTB50数据集中的实验对比结果Fig.2 Experimental results of 6 algorithms on OTB50
由图2可以看出,本文算法Proposed在OTB50数据集中的跟踪精度为74.7%,跟踪成功率为54.8%,均位列所有测试算法第一位.本文算法相较于传统相关滤波跟踪算法KCF,跟踪精度提高了20.9%,跟踪成功率提高了35.6%,具有较大的提升;相较于尺度自适应相关滤波跟踪算法DSST,跟踪精度提高了15.6%,跟踪成功率提高了30.2%;相较于同样利用了上下文信息的相关滤波跟踪算法SAMF_CA,跟踪精度虽然只提高了2.5%,但跟踪成功率则提高了7.1%,由于本文算法采用了更多方向的上下文信息,具有更强的上下文感知能力,因此跟踪成功率进一步提升;相较于采用固定权值进行响应融合的相关滤波跟踪算法Staple,跟踪精度提高了7.3%,跟踪成功率提高了6.4%,验证了本文提出的自适应响应融合策略对算法性能提升的有效性;相较于使用了更大的检测区域的SRDCF算法,虽然跟踪精度和跟踪成功率分别只提高了2.5%和2.8%,但SRDCF算法的实时性较差.
在算法实时性方面,本文算法的跟踪速度为13.6fps,是跟踪性能排名第2的SRDCF算法(2.9fps)速度的4倍以上,与跟踪性能排名第3的SAMF_CA算法(12.3fps)速度大致相当,相较于Staple算法(26.4fps)以及DSST算法(15.2fps)尽管在跟踪速度上有所下降,但在跟踪性能上有一定的提升.所有测试算法中速度最快的为KCF算法,跟踪速度达到了83.4fps,但跟踪效果不佳,算法的精度与成功率相较于本文算法差距较大.
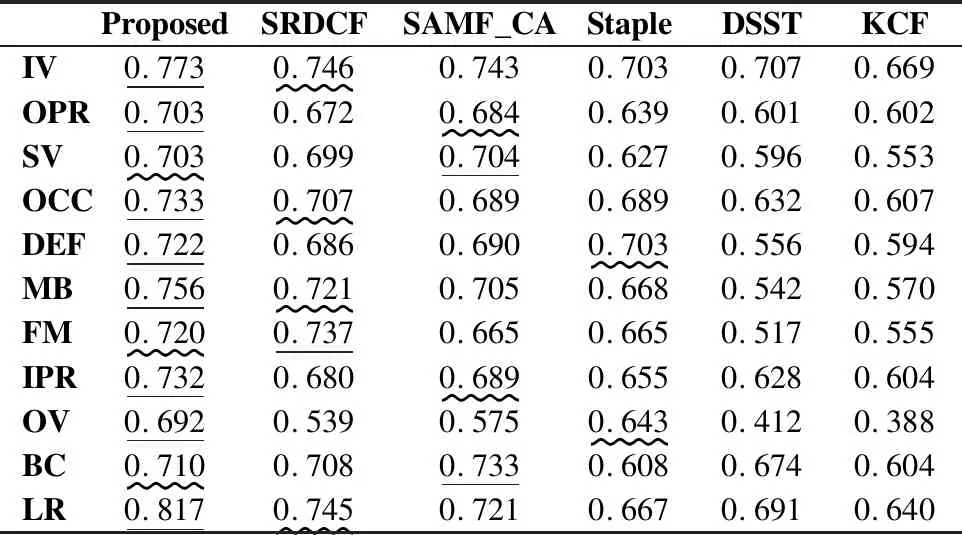
表1 6种算法在不同跟踪挑战因素下的跟踪精度表Table 1 Distance precision of 6 algorithms under different tracking challenges
本文算法与5种对比算法在不同跟踪挑战因素下的跟踪精度如表1所示,跟踪成功率如表2所示.

表2 6种算法在不同跟踪挑战因素下的跟踪成功率Table 2 Success rate of 6 algorithms under different tracking challenges
由表1和表2可知,本文算法在各种跟踪挑战因素中均取得了领先的跟踪效果,特别是在光照变化(IV)、运动模糊(MB)、背景杂波(DEF)、平面内旋转(IPR)、遮挡(OCC)、平面外旋转(OPR)等跟踪场景下跟踪效果有着较大提升.上述实验结果验证了本文算法的有效性,相较于当前主流的相关滤波跟踪算法,本文算法在跟踪性能上有了进一步的提升,同时对于不同的跟踪挑战因素具有良好的适应性和鲁棒性.
4.4 定性分析
为了进一步说明本文算法在复杂跟踪场景下的跟踪性能,本文选取了5组包含了多种跟踪挑战因素的视频序列对本文算法进行定性分析,6种算法在视频序列的跟踪结果如图3所示.

图3 6种算法在视频序列中的跟踪结果Fig.3 Tracking results of 6 algorithms in the video sequences
在Ironman视频序列中,跟踪目标所处的场景中有较大的亮度变化,在跟踪过程中目标还出现了运动模糊的情况.在第35帧时,由于出现了较强的亮度变化,对跟踪目标的外观产生了较大的影响,此时已有多个算法出现跟踪漂移的情形,但得益于本文提出的自适应响应融合方法,本文算法仍然能够较好地确定目标位置.到第83帧时,除了本文算法外,其余算法已完全丢失目标,大多数算法由于学习了剧烈变化的跟踪目标外观来进行模型更新,导致模型污染,而本文采用了高置信度模型更新策略,提升了算法鲁棒性,因此能够减轻模型被污染的风险.
在Dragonbaby视频序列中,跟踪目标经历了快速运动以及尺度变化等情况.在第40帧时,大多数算法已经偏离了跟踪目标,只有本文算法以及SRDCF算法能够较好地适应目标的快速运动,并在后续视频序列中持续地跟踪目标.同时,由于本文算法相较于SRDCF算法使用了更多的尺度估计数量,因此对跟踪目标的尺度估计更为精确,如在第84帧时目标出现较大的尺度变化,虽然本文算法与SRSCF算法均跟踪到了目标,但本文算法的跟踪结果更为精确.
在Freeman4视频序列中,视频序列的分辨率较低且有部分遮挡的情形.对于分辨率较低的视频序列,同样采用了HOG特征和颜色直方图特征并使用固定权值进行响应融合的Staple算法相较于本文算法,跟踪效果不佳,而采用了自适应响应融合方法的本文算法能够在颜色直方图特征响应不可靠的情形下自适应调整响应融合权重,降低颜色直方图特征的影响,使本文算法对低分辨率视频序列有更好的适应性.在第142帧时,由于目标被部分遮挡,部分算法出现了跟踪漂移,本文算法由于利用了上下文信息,因此具有较好的抗遮挡能力.
在Couple视频序列中,跟踪目标的周围背景较为杂乱,且出现了相似干扰物体,同时在跟踪过程中目标出现了一定的姿态变化.在第60帧时,已有多个算法漂移到了其它背景干扰物体上,而本文算法由于利用了上下文信息,能够对目标周围的背景信息进行感知,避免相似干扰物体的影响.在后续的视频序列中,由于拍摄视角的变化以及行人行走姿态的变化,跟踪目标出现了一定的形变,仅有本文算法与SRDCF算法能够较好地对目标进行跟踪.
在Tiger2视频序列中,出现了出视野、平面外旋转、部分遮挡等跟踪场景.在第88帧时,目标部分移出视野,大多数算法出现了不同程度的跟踪漂移,SRDCF、KCF以及本文算法能够较好地估计目标的位置.在第273帧时,目标被部分遮挡,部分算法进行了错误的模型更新加剧了模型漂移.在第350帧时,目标进行了平面外旋转,此时仅有SRDCF、Staple以及本文算法能够较好地对目标进行跟踪.相较于其它算法,本文算法对视频序列中目标的出视野、平面外旋转等多种跟踪挑战场景均能够较好地适应.
上述视频序列分析结果表明,在具备多种跟踪挑战因素的复杂场景中,本文算法仍然能够较好地对目标进行跟踪.同时,在本文算法中采用的上下文感知、自适应响应融合以及高置信度模型更新策略进一步提升了算法的跟踪精度与鲁棒性,验证了算法在复杂跟踪场景下的有效性.
5 结 论
本文提出一种基于上下文感知和自适应响应融合的相关滤波跟踪算法,通过在目标搜索区域周围多个方向采集上下文图像块作为正则项使得跟踪算法具备上下文感知能力,同时选取了HOG特征和颜色直方图特征,通过自适应响应融合方法来对二者特征的响应图进行融合,最后使用了响应峰值和平均峰值相关能量两个置信度指标,采取了高置信度模型更新策略来进行模型更新.本文在OTB50数据集上进行实验,将本文算法与5种主流相关滤波跟踪算法进行了对比.实验结果表明,本文算法在OTB50数据集上达到了74.7%的跟踪精度,跟踪成功率为54.8%,排名所有测试算法第1位,并且在复杂的跟踪挑战因素下仍然具有较好的精度与鲁棒性,特别是在光照变化、遮挡、背景杂波、运动模糊等跟踪场景下跟踪效果有着较大提升,从而验证了本文算法的有效性,对后续相关滤波跟踪算法的研究具有一定的参考意义.
猜你喜欢
农业工程学报(2022年10期)2022-08-22
舰船电子工程(2022年6期)2022-08-02
汽车工程师(2021年12期)2022-01-18
现代仪器与医疗(2021年4期)2021-11-05
影像视觉(2018年12期)2018-11-29
计算机应用(2016年10期)2017-05-12
中学生数理化·高一版(2017年2期)2017-04-25
初中生世界·八年级(2017年3期)2017-03-24
读者(2015年9期)2015-05-04
意林(2011年10期)2011-05-14