
一种非标准X型四旋翼飞行器的建模与PD串级控制
2021-04-09 11:01:02赵雅蓉牛兴龙李大威
兵器装备工程学报 2021年3期
赵雅蓉,鲜 浩,牛兴龙,林 都,李大威
(中北大学 电气与控制工程学院, 太原 030051)
非标准X型四旋翼飞行器不仅具有X型四旋翼飞行器的特性,还更符合实际生活的应用。与十字型四旋翼飞行器相比,X型四旋翼飞行器灵活性更强,性能更加稳定。对于外形各异的四旋翼飞行器来说,旋臂间夹角不再固定,会随适用的场景而变化,例如,折叠式X型四旋翼飞行器为考虑轻装便捷,根据模型样式对旋臂夹角做适当调整。
非标准X型四旋翼飞行器是4输入6输出的欠驱动系统,由于控制变量个数小于系统自由度个数,在节约能量、降低造价、增强系统灵活度等方面较完整驱动系统有很强的优越性,同时,由于系统严重非线性、强耦合等原因,欠驱动系统又足够复杂,只能用自动控制器来控制飞行姿态。
近年来,非标准X型四旋翼飞行器迅速成为国内外的研究热点。文献[1-6]中结合气动效应,研究了飞行器的姿态控制问题,建立了一种连续多变量姿态控制器。上述文献的研究对象多是十字型四旋翼飞行器,而非标准X型四旋翼飞行器姿态飞行联动性更好,实用价值更高。文献[7]中讲述了非标准X型四旋翼飞行器总体建模的数学理论。文献[8-9]中讲述了非标准X型四旋翼飞行器总体布局设计。由于飞行器的严重非线性和强耦合性,很难对模型精确刻画,故对模型进行线性化处理,见文献[10-11]。文献[12-18]中运用了多种控制方法跟踪飞行器的飞行轨迹,如PID控制、鲁棒控制、全动力学轨迹控制、滑模控制等。
文献多选用十字型四旋翼飞行器作为研究对象,与其相比,非标准X型四旋翼飞行器的飞行姿态联动性更好。由于标准X型四旋翼飞行器不能满足多变化应用场景的需求,因此DIY飞行器盛行。
针对一种非标准X型四旋翼飞行器,本文首先建立数学模型,再用测量方法估计模型中的未知参数。然而,由于控制效率模型复杂,控制器设计难度增加,因此本文选用算法成熟且可靠的PD控制器,设计PD串级控制器,通过内外环的控制策略,对控制器进一步调控,最后通过数值仿真验证控制器的稳定性和收敛性。
1 飞行姿态数学表示
非标准X型四旋翼飞行器的姿态由滚转角φ,俯仰角θ,偏航角ψ来描述。同时同量减小螺旋桨1和2的转速,增加螺旋桨3和4的转速,不平衡力矩使飞行器向右滚转;同理,减少螺旋桨1和4的转速,增加螺旋桨2和3的转速,引起飞行器向前俯仰;减小螺旋桨2和4的转速,增加螺旋桨1和3的转速,使前后和左右飞行的力矩为零,逆时针的偏航力矩增加,飞行器逆时针偏航。
如图1所示,螺旋桨1和3顺时针旋转为正,反扭矩逆时针偏转,螺旋桨2和4逆时针旋转为正,反扭矩顺时针偏转。根据右手定则建立坐标系,z轴向下为正方向。地球固联坐标系用于研究飞行器相对于地面的运动状态,下标用e表示地球固联坐标(earth),机体坐标系下标用b表示机体坐标(body)。
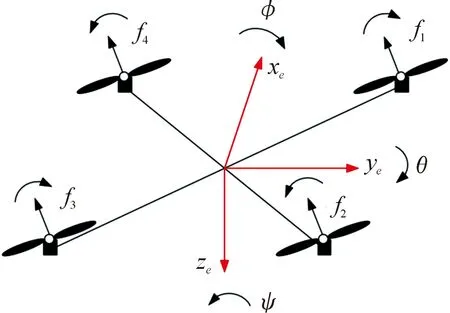
图1 机体坐标示意图

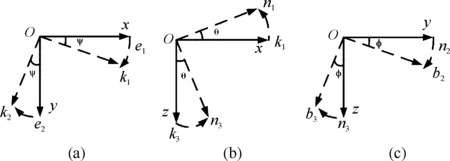
图2 姿态角分步转动示意图
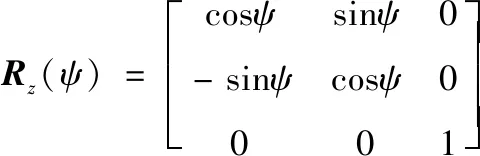
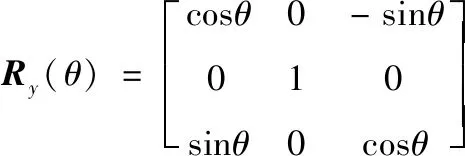
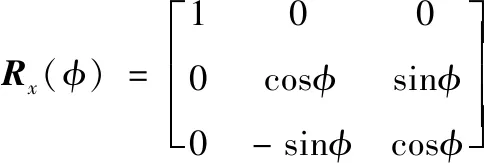
按照Z-Y-X旋转顺序下的旋转矩阵如下:(由机体坐标到地球固联坐标)
(1)

根据位置动力学模型

(2)
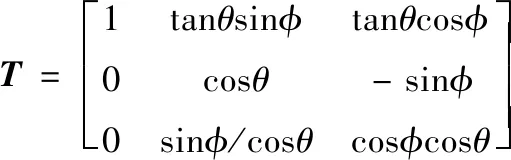
姿态变化率和机体旋转角速度的关系:

(3)

由式(3)可知,

(4)
由于
w=T·wb
(5)
2 数值建模
以一定假设为前提,对飞行器进行机理建模[2,8-9]。假设1:飞行器为刚体模型,且无任何损坏;假设2:几何中心和重心一致;假设3:质量和转动惯量不变;假设4:螺旋桨奇数编号顺时针旋转为正,偶数编号逆时针旋转为正;假设5:飞行器只受重力和拉力影响;假设6:所有状态都可以得到反馈,且-π/2<θ<π/2,-π/2<φ<π/2。
(6)

图3 建模流程框图
2.1 动力单元模型
输入油门指令σ,通过电调输入电压Um,发动电机带动螺旋桨旋转,得到螺旋桨转速,如图4所示。动力单元模型公式如下所示,见文献[8]。
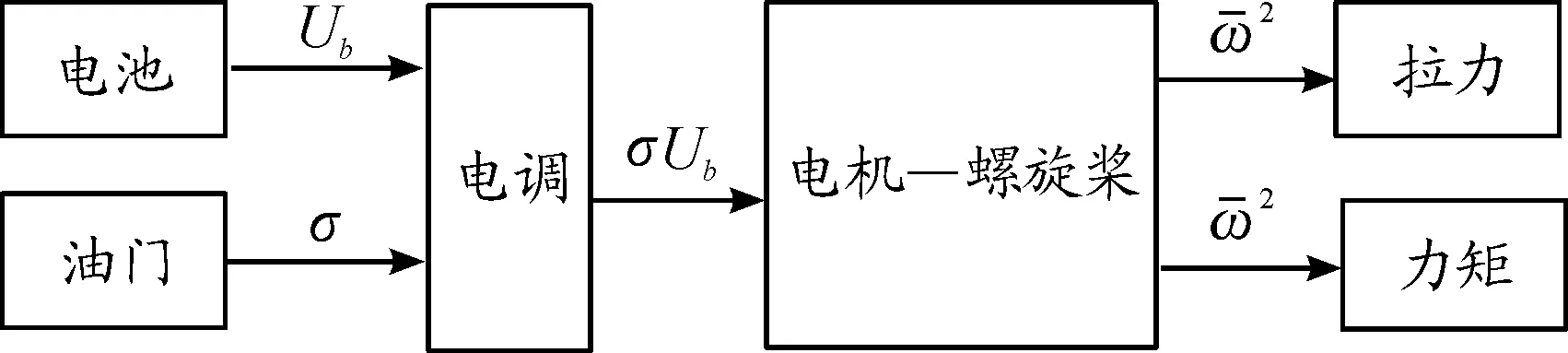
图4 动力系统信号传递框图

2.2 控制效率模型
图5中,飞行器中螺旋桨产生的水平方向力矩不同,如式(9)所示,cT表示拉力气动系数,φi表示电机距离x轴与旋转臂的旋转角度(机体顺时针旋转,φ1表示x轴正方向到电机1的旋转角度,φ2表示x轴正方向到电机2的旋转角度,其他角度同理),d表示旋臂的长度,cM表示转矩气动系数。cT和cM受气体密度和螺旋桨叶片类型等因素影响。
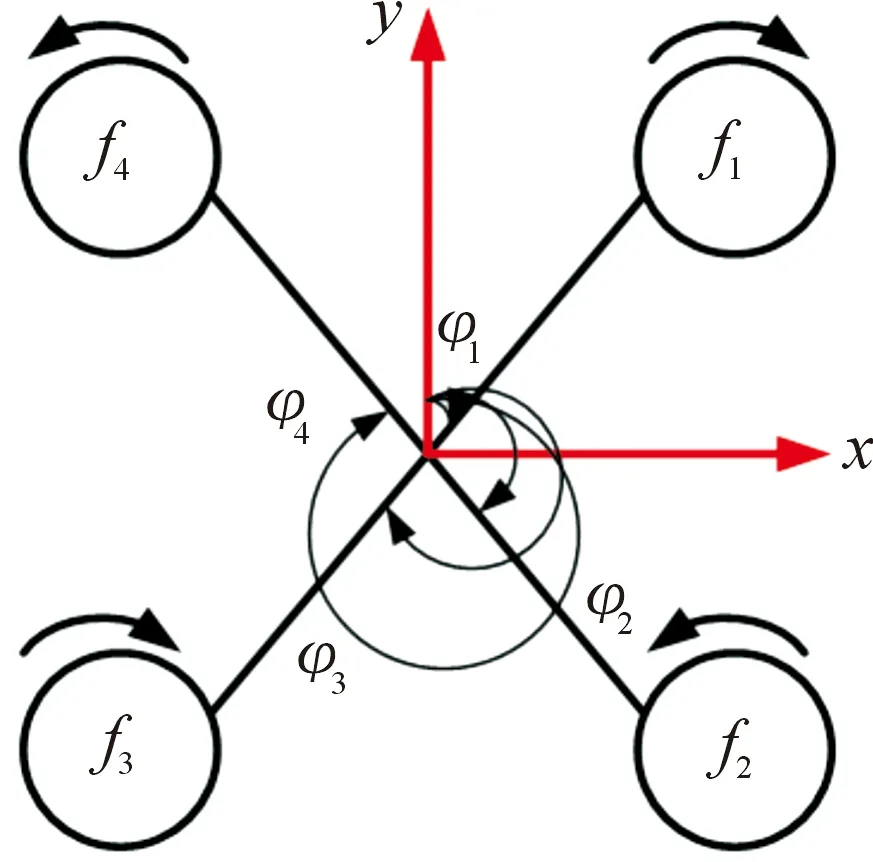
图5 非标准X型四旋翼飞行器机体示意图
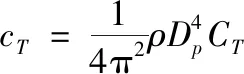

其中,ρ表示空气密度(kg/m2);DP表示螺旋桨直径(m);CT表示螺旋桨拉力系数;CM表示螺旋桨转矩系数。
2.3 控制刚体模型
机体系下位置动力学模型如式(3)所示,将机体坐标变为惯性坐标。在满足6个假设的前提下,只考虑重力和拉力对飞行器的影响。
位置动力学模型:

(7)
即
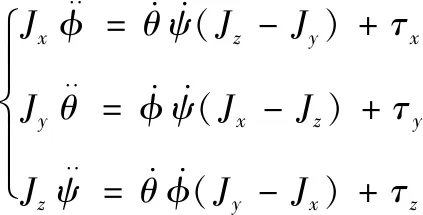
姿态动力学模型:

(8)

由式(2)、式(5)将机体坐标变换为惯性坐标,得到机体速度和角速度的方程。当飞行器悬停时,拉力抵消重力,4个螺旋桨拉力产生的滚转、俯仰力矩为零,偏航力矩为零,4个螺旋桨反扭矩效应均被抵消。如下式所示。
2.4 模型线性化
对于非标准X型四旋翼飞行器系统,由于三角函数相互联系很难找到闭环形式的解,所以,线性化是在小振荡的简化模型上进行的。通过将正弦函数与其幅角近似,将余弦函数与单位近似得到。
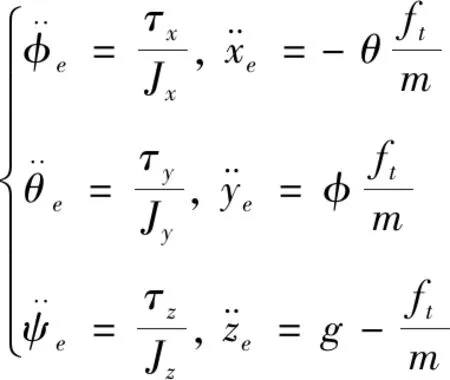
基于非标准X型四旋翼飞行器的非线性模型,忽略陀螺力矩和-wb×(J·wb),得到姿态模型,在无扰动的情况下,只与力矩有关。通过悬停点的小角度线性化,得到下列方程组式(9)(见文献[9-11]):
(9)
(10)
本文重点使用式(9)中的6个公式,根据加速度和角加速度,通过积分即可求得系统位置和姿态角。
(11)
将式(9)化简为式(11),其余6个公式中,机体坐标约等于惯性坐标。
一个可解的线性代数方程组只有一个解,当且仅当系统矩阵是满秩。所以根据系统矩阵的秩,检测模型在有限时间内的可观性和可控性。
3 参数测量与数值仿真
由引言可知,非标准X型四旋翼飞行器模型有4个输入变量,总拉力ft和在3个坐标轴的分力矩τx、τy、τz,6个输出变量位置(x,y,z)和姿态(φ,θ,ψ)。
图6为根据数值建模流程搭建的仿真模型,根据图3建模流程的顺序,仿真模型同样共分3部分内容。

图6 机体仿真模型示意图
如图7所示,动力单元模型是对电机油门值到电机转速过程的建模,分为动态部分测试和稳态部分测试,动态测试部分遵照设计的通讯协议发送“aa aa aa 7f xx xx”,前4位为数据起始位,后2位为发送的油门值,通过算法组合送到CCR1寄存器中,通过PWM程序控制电机,当单片机收到油门指令立即发送计数器中编码器的位置,通过微分和滤波得到转速。测量并记录不同油门值下的动态和稳态数据,计算一阶惯性系统的稳态增益K与时间常数。稳态测试部分实验过程与动态过程基本一致,实验中需要改用光电检测转子转速从而获得更加准确的速度测试值。清除死区的影响,除去前四组数据,使用MATLAB的curve fitting tool,最小二乘法拟合得出图8(d)。动力单元模型近似收敛为一阶传递函数30/(0.14s+1)形式。

图7 动力单元模型测速框图
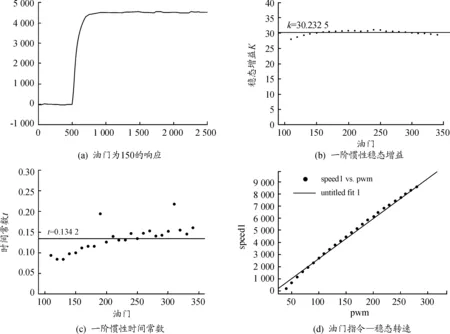
图8 动力单元模型数据测量
控制效率模型子系统,由式(9)可知,力和力矩与螺旋桨转速的平方有关,输入转速的平方,输出拉力和三轴力矩,具体测量见图9所示。电机力矩测试如图9(a)所示,电机固定在木板上,木板通过4个螺栓固定在主体木块上面,在主体木块上安装两个轴承,这两个轴承与电机应当尽量共轴,主体木块通过长螺栓与支撑柱连接,保证主体木块在垂直方向上可以自由转动,同时水平方向上的运动尽量减小,这样一来,电机转动时产生的转矩转换到了主体木块上,木块左端安装一根螺杆,调节长度使得螺杆压在电子秤上的同时,也保证主体木块尽量水平。通过发送不同的油门值给单片机,来获得电机的转速和相应的力,测试结果如图9(b)所示。使用Mayatech MT10PRO电机拉力测试台,平台最大支持10 kg拉力测试,支持拉力计电流功率数显。先将拉力用3 m固定贴和螺丝固定在桌面,接5~26 V电池,打开控制盒开关,归零。装上合适电机和桨,开始测试,如图9(c)所示。实验通过上位机向单片机发送油门指令,然后通过仪器读出升力的值,单片机串口向上位机发回测得的转速,从而获得转速与升力的对应关系。测试结果如图9(d)所示。控制刚体模型子系统(状态空间描述),通过式(11)完成非标准X型四旋翼飞行器模型结构变换,即建立状态空间模型。根据4个输入变量,总拉力ft和在3个坐标轴的分力矩τx、τy、τz,输出位置变量和姿态变量,具体数据如下,见表1(角度仿真采用弧度进行计算)。
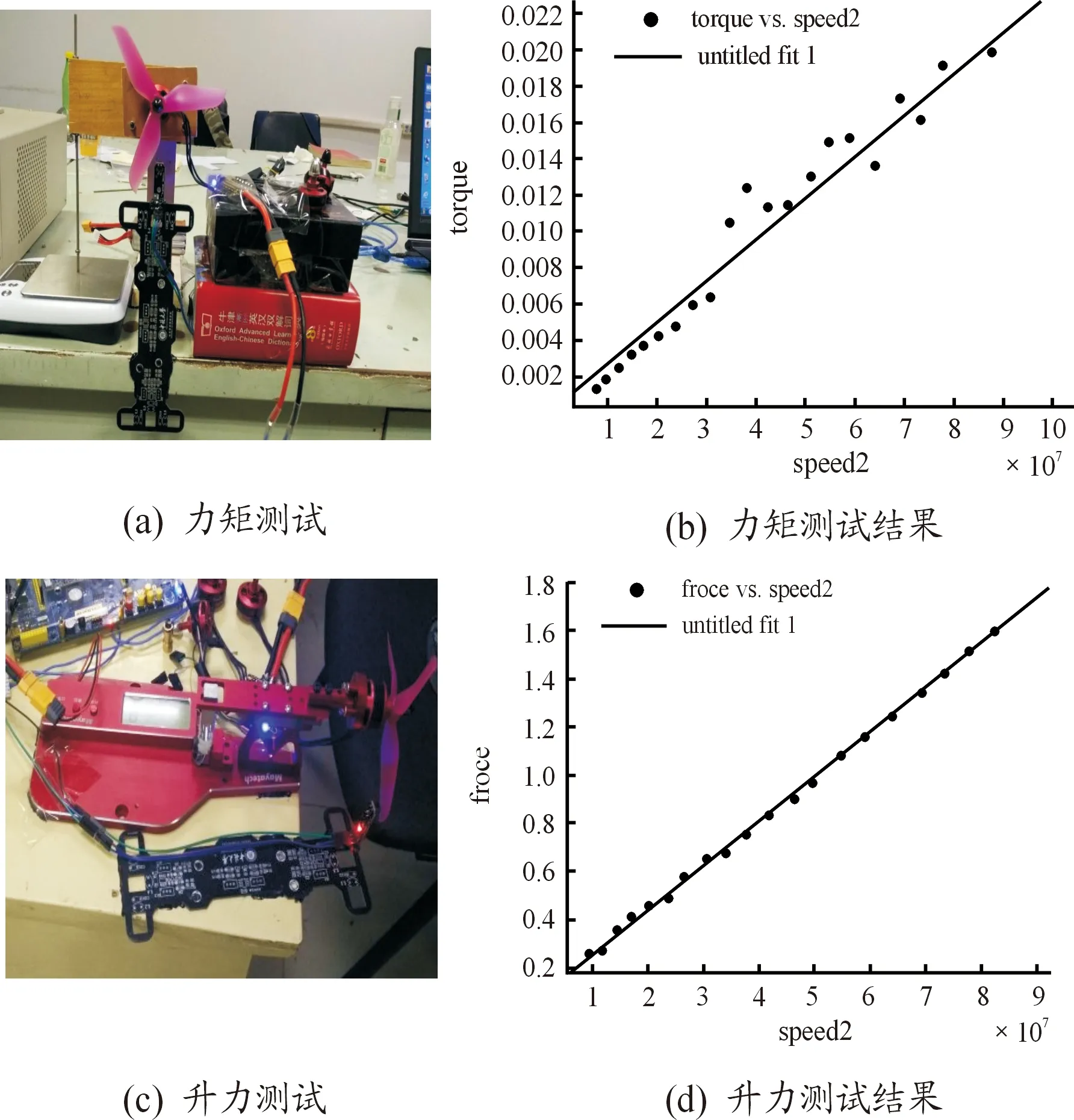
图9 电机控制效率模型数据测量

表1 非标准X型四旋翼飞行器模型参数
4 PD串级控制
本文设计PD串级控制策略,根据期望值和实际输出值构成的偏差,将偏差通过比例和微分的线性组合对非标准X型四旋翼飞行器进行控制。如图10所示,设计采用内外环的控制策略,其中,内环对非标准X型四旋翼飞行器姿态角参数进行控制,外环对非标准X型四旋翼飞行器的飞行高度和水平位置等物理量进行控制,外环控制器为内环控制器提供指令。内环控制器先对系统进行“粗调”,外环控制器再进一步对系统进行调控,因此,PD串级控制品质优于普通控制系统,其优点是控制器的工作频率增加,控制响应时间减少。
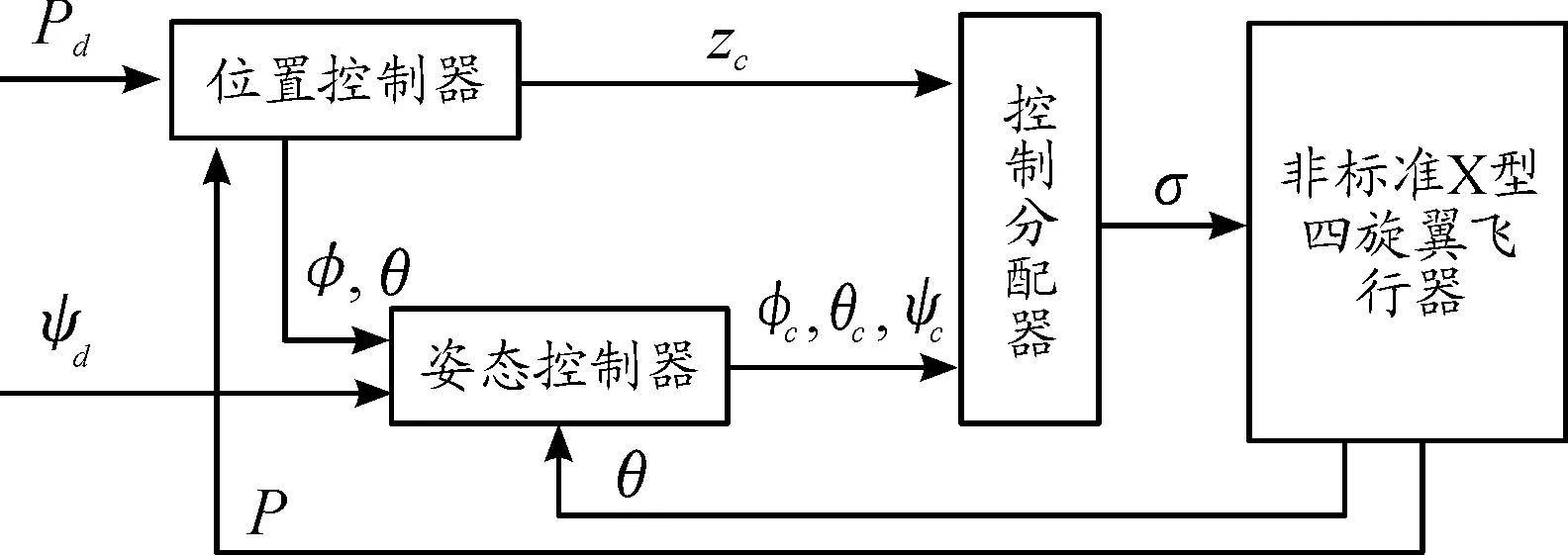
图10 PD串级控制闭环框图
当有地面效应或大气紊流时,可以调节积分增益,提高姿态角的精度,从而消除稳态误差。在控制四旋翼时,无论室内室外,四旋翼飞行高度一般不会低于1 m,地面效应对四旋翼的影响微小,本文针对的是实验室场景、晴朗无风或微风场景下,故不考虑大气紊流对四旋翼的影响。并且,对于多变量的非标准X型四旋翼飞行器PID串级控制,PID控制增益的选择非常复杂,DIY四旋翼时参数的调整难度大,故不考虑积分控制器。
4.1 PD内环控制
PD内环控制即姿态控制,姿态是一个随动控制系统,它的期望值随水平位置控制器(外环)的输出而变化。一般来说,姿态控制能够被实现,水平位置跟踪问题就可以被解决。

理想的PD控制器:

(12)
其中,u(t)为控制输出;e(t)为姿态误差,选择设计参数kP和kD来实现期望的闭环性能。对式(16)作拉普拉斯变换,得到的方程如下式:
U(s)=(kP+kDs)E(s)
姿态控制器由3个解耦控制器组成,一个滚转控制器,一个俯仰控制器和一个偏航控制器。由于本文设计的是理论模型,积分环节为0,不影响系统的控制误差。在无外环控制下,选择3个控制器的期望参数,模拟估计模型使用不同增益值得到的控制器参数,具体参数如表2所示。

表2 PD串级控制参数
非标准X型四旋翼飞行器PD串级控制参数的调节较为复杂,需针对各个轴分别进行PD控制参数的调节。首先针对无人机的内环进行调参,控制其姿态,然后对外环进行调参,控制其位置。
比例增益系数太低,飞行器行动将变迟缓,增益系数过高,会导致误差(超调)过度修正,微分增益系数防止超调,抑制误差变化,减小振动。由于垂直动态特性比水平动态特性快,因此水平动态控制将严重影响大变化的垂直动态。对于偏航角的控制,需达到期望高度后再控制角度。
4.2 PD外环控制
期望位置动态:

(13)

为实现定点控制,位置动态的期望速度和期望加速度均为0,故将式(13)化简得到下式:
由于非标准X型四旋翼飞行器处于悬停状态,ft/m≈g,sin(θ)≈θ,cos(θ)≈1,将式(7)化简可得式(14)、式(15):

(14)
(15)
由式(14)、式(15)可得:
(16)
根据水平位置控制量转化为期望的姿态角指令φd,θd。由式(13)可知,通过外环的PD控制器可以求得期望水平位置加速度,通过式(16)矩阵求逆可以得到期望姿态角指令,如下式所示,具体数据参考表2。
5 仿真验证
为验证所提出的PD串级控制器的有效性,给定期望的偏航角为10*pi/180(弧度值),期望的水平位置,x为1 m,y为1 m,设定高度z为-10 m,因为本文设定z轴向下为正方向,所以非标准X型四旋翼飞行器向上飞时,z的值应为负值。
从仿真结果图11中可以看出,图11(d)中,飞行器在2 s内持续平稳垂直上升,姿态角和水平位置无变化,飞行器为了到达期望高度和位置,2s后开始产生滚转角和俯仰角,如图11(a)(b),且在飞行到一定高度后下降,飞行器最终在4 s 时稳定在10 m高度,后趋于稳定。滚转角和俯仰角大角度的转动,对水平通道位置的影响较大,如图11(e)(f),对高度通道位置影响微小,如图11(d),z只产生了微小的抖动。飞行器姿态角调节角度,飞行器向期望水平位置移动,并在10 s后,偏航角稳定于0.175弧度,即偏航角为10°,如图11(c),最终在8 s后稳定。滚转角和俯仰角没有大幅度的偏转后,水平位置到达1 m后稳定。

图11 仿真曲线
6 结论
本文选用非标准X型四旋翼飞行器,模型更具普遍性,能够适合实际应用中对模型样式的多种需求。通过讨论非标准X型四旋翼飞行器的建模过程,系统的分析了模型内部从输入油门指令到动力学输出位置和姿态的全过程,并对参考文献[8-10]中未提及或详细说明的动力单元模型转速和控制效率模型螺旋桨拉力系数和螺旋桨转矩系数的测量方法进行了补充,具有实际参考价值。为了便于DIY飞行器玩家根据不同的应用场景调试参数来达到控制稳定性,设计了连续多变量的PD串级控制器,通过内环姿态控制,外环位置控制,能够更方便精准的实现对非标准X型四旋翼飞行器模型的进一步调控。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
航空发动机(2020年3期)2020-07-24 09:03:16
西部学刊(2020年2期)2020-04-22 00:37:17
焦作大学学报(2019年2期)2019-05-31 08:42:48
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
河南科技(2014年23期)2014-02-27 14:19:02
