
双活塞式高精度深海压力模拟方法
2021-04-07 03:08王淮阳胡珊珊刘正士
计量学报 2021年2期
王淮阳, 胡珊珊, 刘正士, 王 勇
(合肥工业大学 机械工程学院, 安徽 合肥 230009)
1 引 言
研制水下仪器设备所需的实验研究、压力传感器的标定、水下机器人模拟随水深度变化的特性研究、海啸的实验模拟等场合都需要用到高精度的压力装置[1~3],因此研制一套高精度的压力实验平台对水下仪器产品的实验研究具有重要意义。为实现高精度的压力控制,常用的方法是利用液压泵和电液伺服阀来实现压力的调整,但这种方法由于受到电机转速的波动或电液伺服阀本身控制精度的影响,难以实现高精度的压力控制[4,5]。基于液体的压缩性,利用活塞改变密封容器内的液体的容积的方法可实现压力的高精度控制[6,7],但由于该方法的加压活塞截面积一定,导致其压力调整范围和精度受到限制,在大压力环境下无法模拟微小波动压力,即无法实现大压力环境下高精度的压力模拟,从而影响了其应用范围。深海压力环境的高精度模拟不仅需要模拟大的压力,还需要模拟大压力下的精度调整,而大压力下的精度调整是相对较困难的。
针对以上问题,基于液体可压缩性提出了双活塞式模拟压力的方法[8,9]。该方法的加压系统包括主加压系统和辅加压系统,其中主加压系统主要用于快速实现给定压力,辅加压系统主要用于精确调整给定压力,通过控制2套加压系统的作业顺序以期实现对给定压力的高精度控制。
2 工作原理
由液体的压缩性可知,压力的改变量和密闭液体的体积改变量对应的关系为:
(1)
式中:Δp为液体压力;ΔV为液体体积改变量;Ev为液体的体积弹性模量;V为液体初始总体积。
ΔV=ΔV1+ΔV2=Δx1A1+Δx2A2
(2)
式中:ΔV1为主加压系统改产生的体积改变量;ΔV2为辅加压系统改产生的体积改变量;Δx1和A1分别为主加压系统活塞的位移和截面积;Δx2和A2分别为辅加压系统活塞的位移和截面积。
因此可通过活塞移动来改变密封液体的体积,进而实现密封液体压力的增大或减小。根据此原理搭建的高精度压力模拟系统的组成如图1所示,其中虚线框内分别是主、辅加压系统的主要部件,同时规定主加压系统的加压缸1的活塞截面积大于辅加压系统的加压缸2的活塞截面积,因此加压缸1活塞和加压缸2活塞位移相同的情况下,加压缸1产生的压力变化要大于活塞2产生的压力变化。
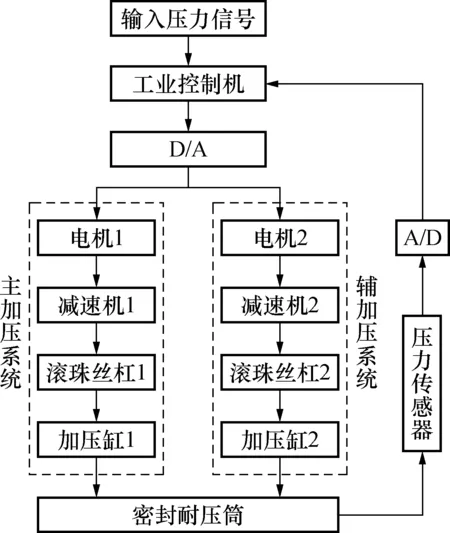
图1 压力模拟系统组成图Fig.1 Composition diagram of pressure simulation system
系统工作过程如下:初始压力为零,根据判定条件启动主加压系统,带动加压缸1的活塞对密封筒内的液体进行加压,从而使得密封耐压筒内的压力快速增大,当系统压力与设定压力之差绝对小于设定的压力差E1时,主加压系统工作结束,活塞停止运动;再启动辅加压系统,带动加压缸2的活塞对密封筒内的液体进行加压,待给定压力与实测压力的差值小于E2,辅加压系统停止运动,从而实现压力的精确调整。具体压力调整流程如图2所示。
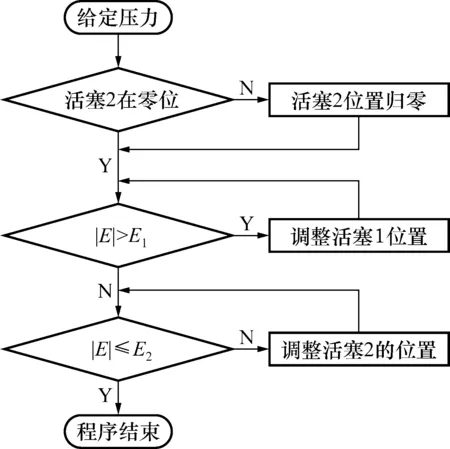
图2 压力调整的流程图Fig.2 Flow chart of pressure adjustment
3 系统参数
3.1 主要参数的选取
根据设定目标选取系统的主要参数如表1所示。
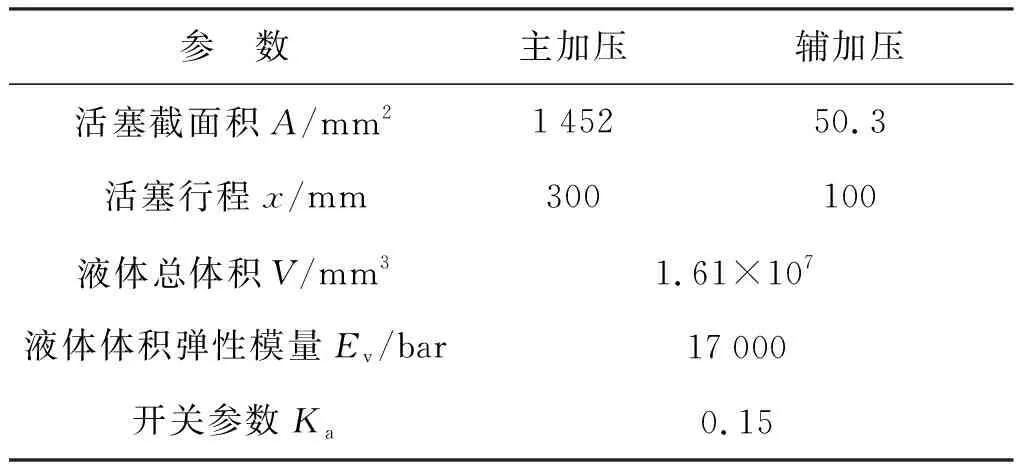
表1 系统参数Tab.1 System parameter
3.2 主、辅加压系统对压力控制精度的影响
对于主、辅加压系统而言,所能改变液体介质的体积分别为:
V1=x1A1
(3)
V2=x2A2
(4)
式中:x1,x2分别为主、辅加压活塞缸的有效行程;V1,V2分别为主、辅加压活塞所能改变的介质体积。
结合式(1)和表1可以得到主、辅加压活塞单独进行加压时其位移与压力之间的对应关系如图3所示。
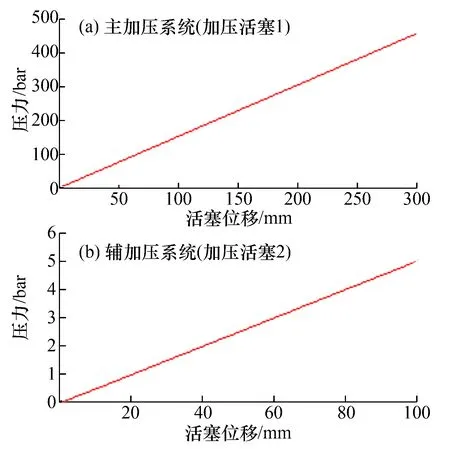
图3 加压活塞的位移和压力之间的关系Fig.3 The relationship between displacement and pressure of pressurized piston
在活塞位移1 mm的情况下产生体积改变量分别为1 452 mm3和50.3 mm3,根据式(1)容易得出主、辅加压系统的加压活塞的单位位移可实现的压力改变量为1.533 bar/mm和0.05 bar/mm,相对于主加压系统,辅加压系统可以使压力调整精度提高30.66倍,因此可以使得压力调整的精度得到有效的提高,克服了只用一套加压系统进行高精度压力调整的局限性。
3.3 主、辅加压系统的切换函数
为了使主、辅加压系统在工作过程上能自动进行加压作业,设定2个函数分别如下:
(5)
(6)
式中:f1(E)为主加压系统的动作判定依据;f2(E)为辅加压系统的判定依据;E为返回值与给定值之差;Ka为设定的参数。
通过设定值Ka与反馈后的压力误差信号E的绝对值进行对比,当|E|不小于Ka时,主加压系统作业,辅加压系统待机;当|E|小于Ka时,辅加压系统作业,主加压系统待机。这样就利用主、辅加压系统的切换函数使得主、辅加压系统的自动作业,进而实现系统压力精确的自动调整。
4 仿真实验
根据系统的工作原理可知,由于滚珠丝杠和加压缸的活塞受到线性速度的限制,因此在仿真系统中利用饱合度函数来限制电机的转速并选取PID控制参数,最后系统仿真模型如图4所示。
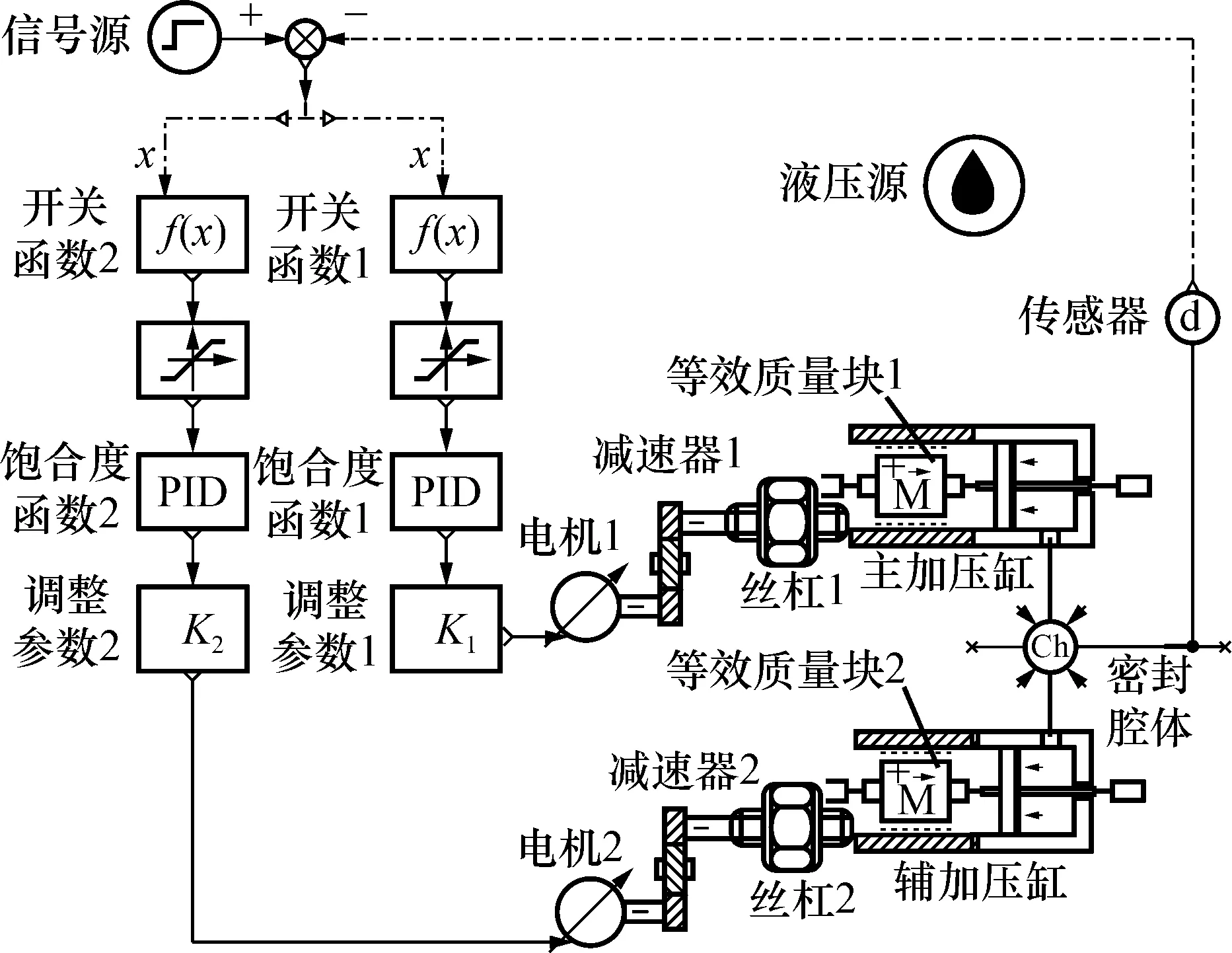
图4 系统仿真图Fig.4 System simulation diagram
4.1 阶跃压力模拟仿真
设定输入信号为10 bar的阶跃压力,仿真结果如图5所示。在压力开始上升起始阶段,压力变化缓慢主要是由于液压介质中含有微量的气泡,使得其体积弹性模量小于实际值[10~12],当压力达到一定数值后气泡被压缩,压力随活塞位移的增加快速上升,并在2 s后压力快速增加,最后在5 s的时候趋于稳定,且稳定误差值为2×10-6bar,这说明系统具有良好的压力调整性能。
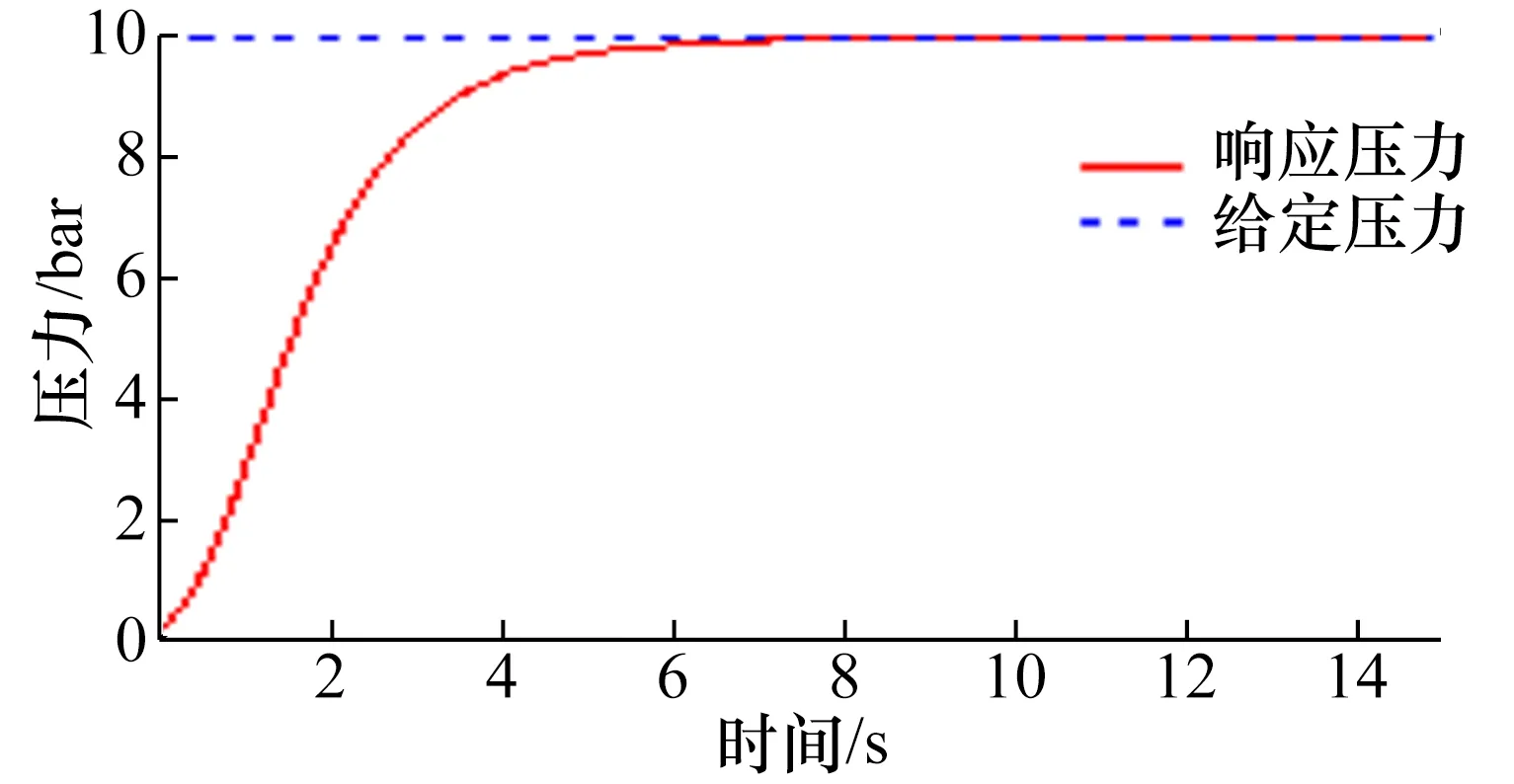
图5 阶跃压力响应Fig.5 Step pressure response
4.2 下潜—保持—上升过程模拟仿真
设定系统以2 m/s的速度模拟在深海过程中下潜和上升过程,由水深和压力的对应关系,仿真结果如图6所示。
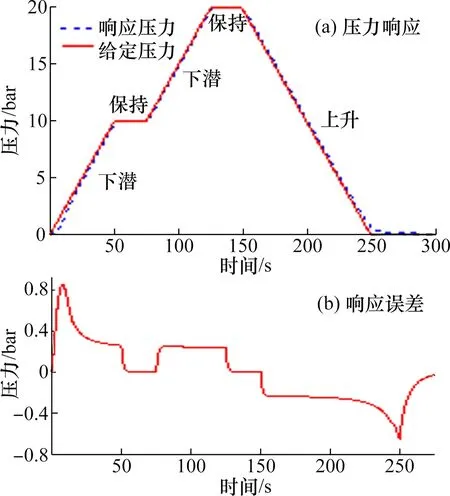
图6 速度为2 m/s的下潜—上升过程压力响应Fig.6 Pressure response of diving-rising process with velocity of 2 m/s
由图6可以看出,当压力随时间上升时,系统的响应压力在前6 s有较大的滞后,随后响应误差逐渐减小,并且给定压力数值在压力上升或下降的过程中其动态跟踪误差小于0.2 bar。
设定系统以0.5 m/s的速度模拟在深海过程中下潜和上升过程,结果如图7所示,给定压力与响应的压力的误差较小,误差在0.05 bar,能够实现对压力的精确跟踪。因此该系统具备实现高精度的动态压力模拟的能力。
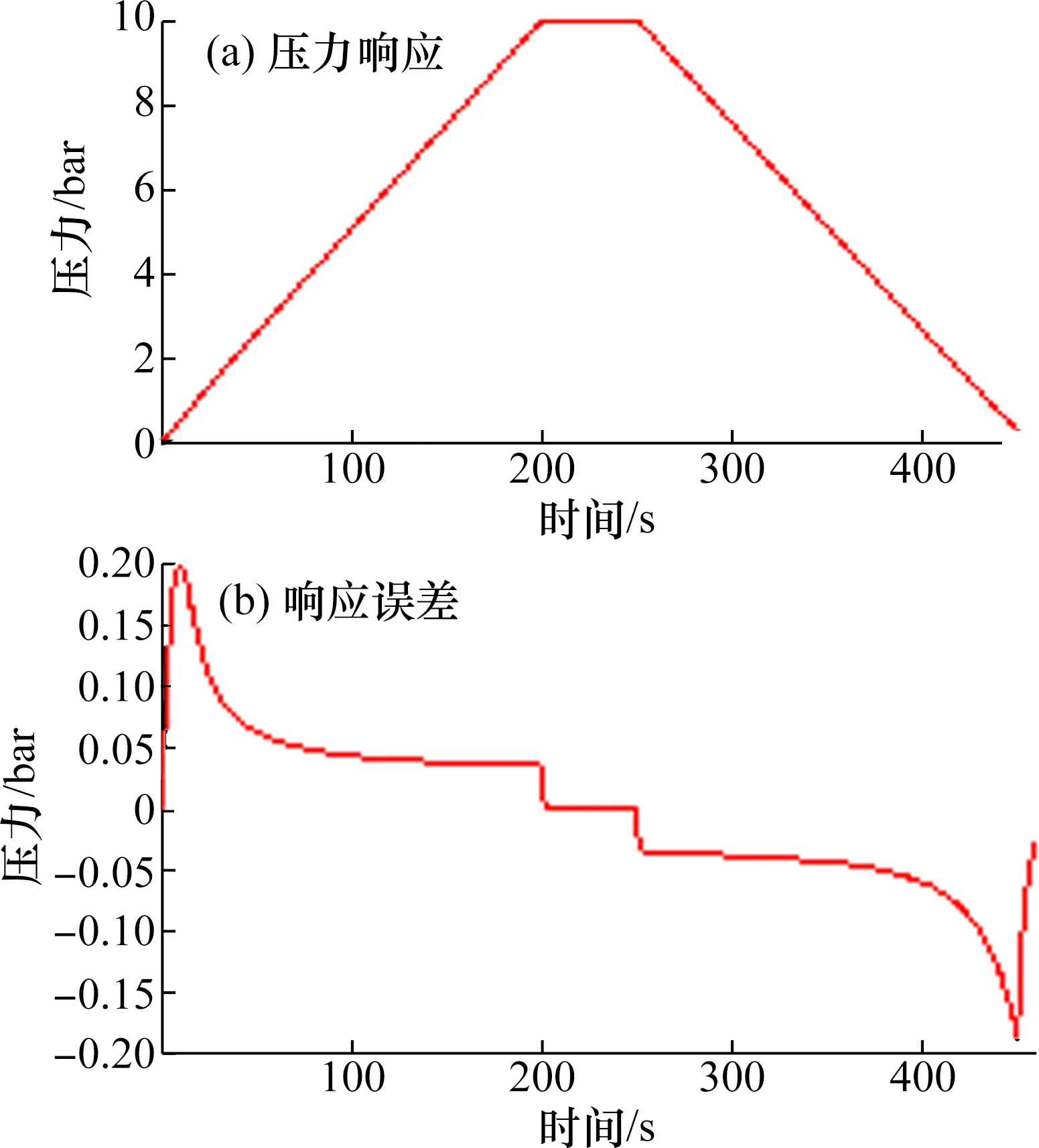
图7 速度为0.5 m/s的下潜—上升过程压力响应Fig.7 Pressure response of diving-rising process with velocity of 0.5 m/s
5 样机实验
为进一步的验证方法的可行性和有效性,搭建了样机平台,如图8所示。
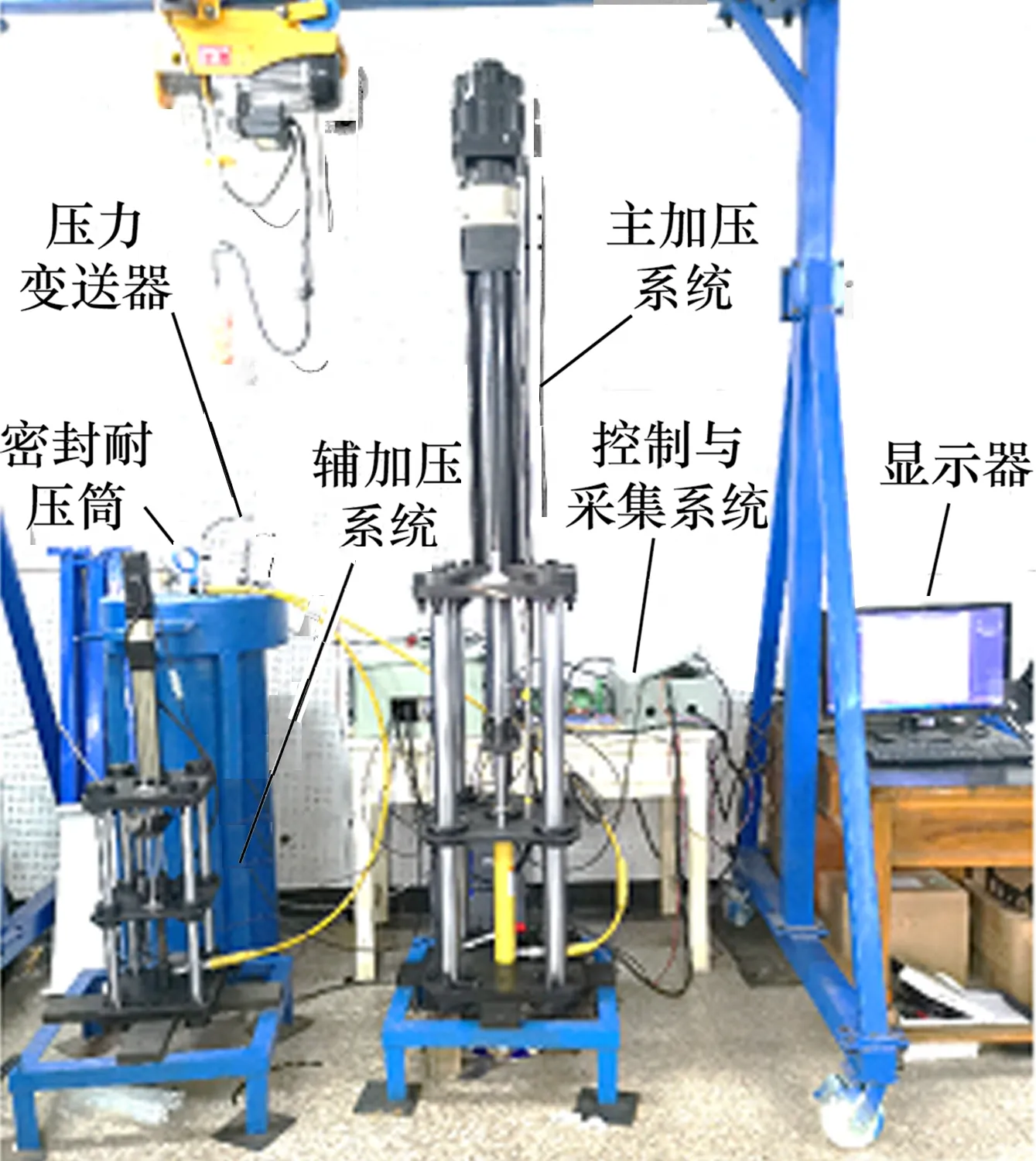
图8 样机实验平台Fig.8 Prototype experimental platform
5.1 阶跃信号压力实验
给定系统10 bar的阶跃信号,实验结果如图9和10所示,压力随着时间缓慢增大,这是由于液体介质内含有气泡,导致液体的实际弹性模量要低于设定值[10~12],在压力达到2 bar后快速增加,直至达到稳定的状态,并且稳态误差为0.02 bar。
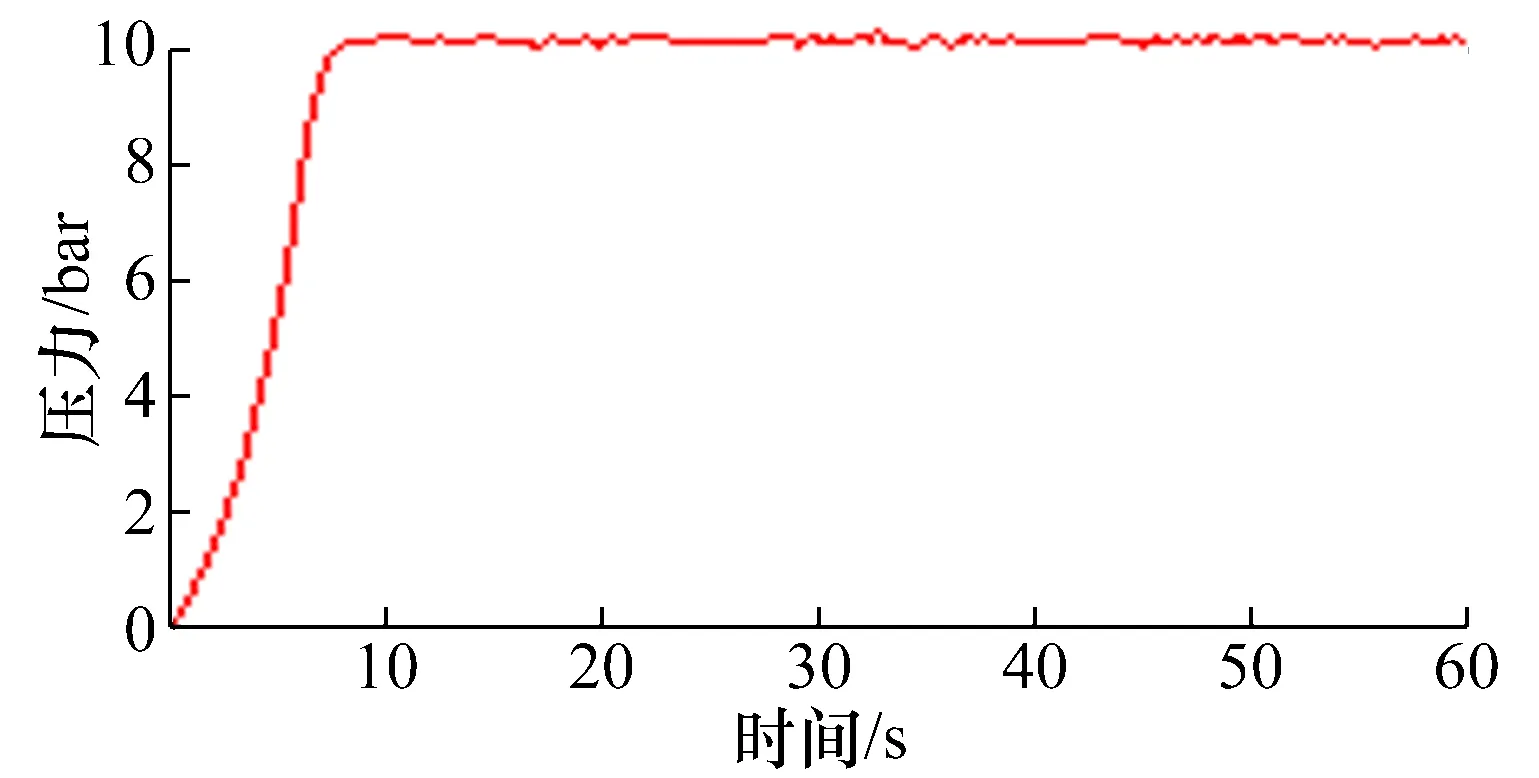
图9 阶跃压力响应Fig.9 Step pressure response
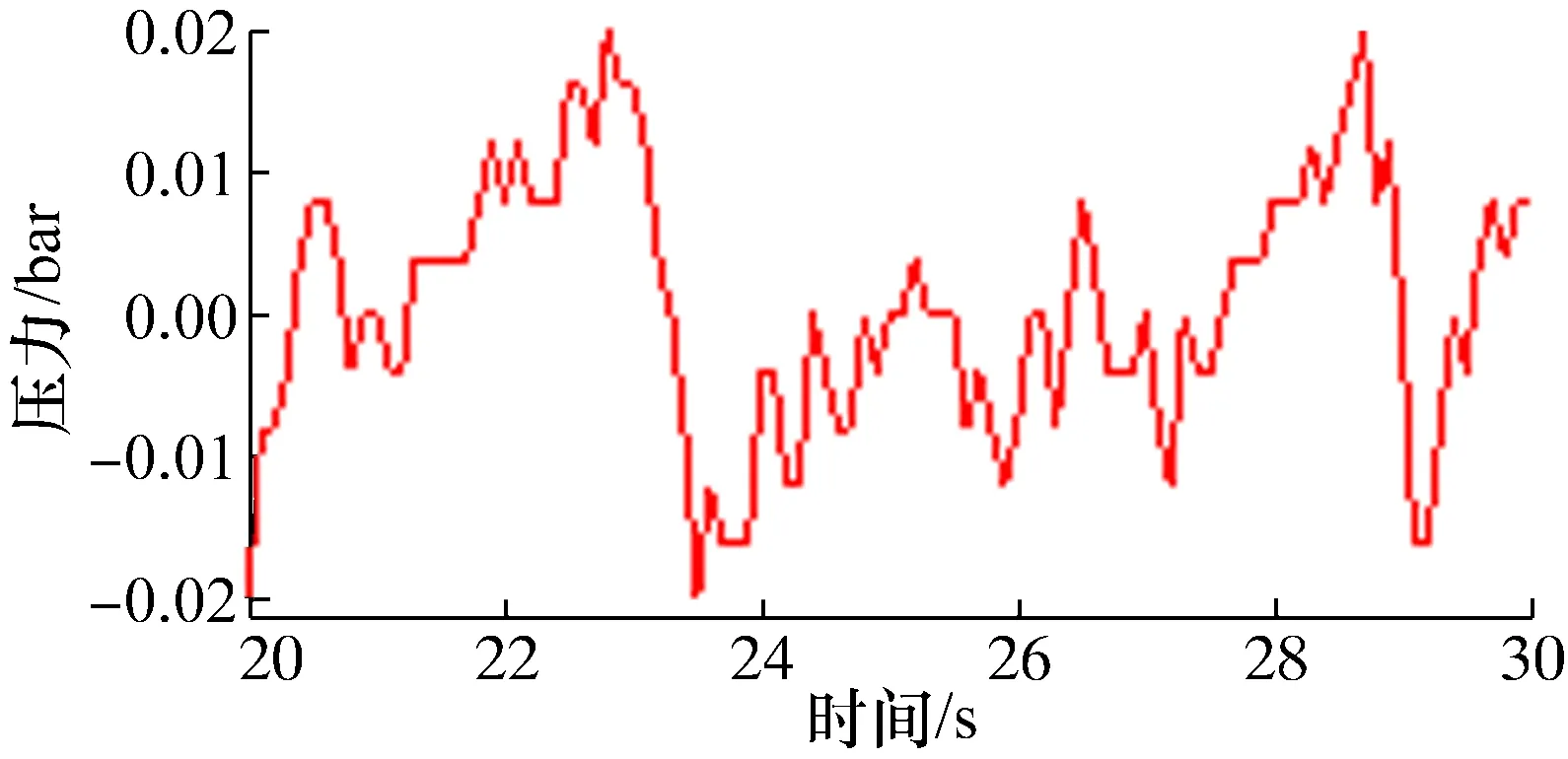
图10 阶跃压力响应误差Fig.10 Step pressure response error
5.2 下潜—保持—上升过程的压力实验
为模拟水下设备在水下运动的过程,选取压力变化的速度为0.5 m/s,从而给定下潜、保持、上升的压力信号,实验结果如图11和12所示。
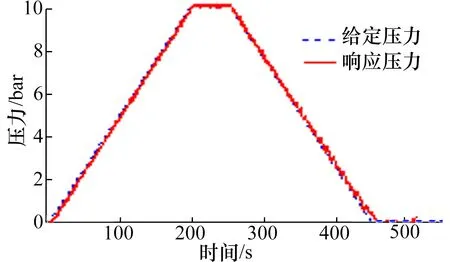
图11 压力响应Fig.11 Pressure response
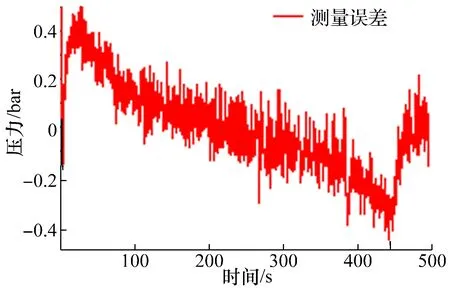
图12 响应误差Fig.12 Response error
由于液体的阻尼的存在,限制了活塞的运动速度,在压力响应初期,实验与给定信号的压力相比,变化较为缓慢,但随着时间的增加,系统响应输出的压力与跟随能力之间的差值逐渐变小, 加压系统的动态误差为0.1 bar,因此主、辅加压系统的配合可实现较高的动态压力调整精度。
6 结 论
利用液体的可压缩性研制的压力模拟系统,如果加压系统仅利用单个加压缸时,它的稳态压力调整精度1.5 bar[6],但是当压力模拟系统的加压系统包括主加压和辅加压系统,可以实现静态精度 0.02 bar,动态精度0.1 bar的压力模拟,静态精度和动态精度都得到了有效的提升。样机的测试实验结果与仿真结果相比,阶跃压力信号的响应速度上落后2 s,精度相对略低;而在压力跟踪方面,当选用压力变化速度为0.5 m/s时,其压力误差的跟踪上的误差在0.1 bar,精度低于仿真的结果0.05 bar。这主要受系统的控制精度和实验条件的限制,使得精度无法达到较高的精度。因此后续工作需要进一步优化控制方法,以期获得更高的动态压力模拟精度。
为了研制高精度深海压力环境模拟实验平台,基于液体的可压缩性提出了双活塞式水深模拟方法。该方法的加压系统包括主、辅加压系统,其中主加压系统利用具有较大截面积的活塞快速实现给定的压力,辅加压系统利用具有较小截面积的活塞实现高精度的压力调整;利用主、辅加压系统的配合可以实现较高精度的压力调整,辅加压系统弥补了主加压系统调整压力精度的不足,这为研制高精度的深海模拟装置提供了新的解决方案。
猜你喜欢
农业工程技术(2022年1期)2022-04-19
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
山东冶金(2015年5期)2015-12-10
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2014年4期)2014-02-27
汽车与新动力(2014年3期)2014-02-27
电力自动化设备(2013年11期)2013-09-18
