网联混合车流车辆换道博弈行为及模型
2021-04-07 12:18黑凯先曲大义郭海兵贾彦峰韩乐潍
科学技术与工程 2021年6期
黑凯先, 曲大义, 郭海兵, 贾彦峰, 韩乐潍
(青岛理工大学机械与汽车工程学院, 青岛 266520)
智能网联车和人工驾驶车交互渗透组成的新型混合车流中,行驶车辆具有独立性、制约性和传递性;智能自动驾驶、网联通信等技术使网联汽车具备高精度感知、高速度通信和超快速反应的特性,相较于传统人工驾驶车辆其感知和反应时间均大幅缩减。智能网联技术一直是智能交通领域研究的重点。近几年来,随着城市污染、交通拥堵、交通事故等问题的日益凸显,智能网联技术的研究变得尤为重要。英国汽车工程师学会根据车辆智能程度,将智能车辆划分为无自动化、驾驶支持、部分自动化、有条件自动化、高度自动化、完全自动化6个等级[1]。虽然对智能网联自主车辆的研究从20世纪就已经开始,其间也攻克了无数的难关,但是距真正完全自动化的自主车辆的普及还需要经历很长的研究实验过程,人类驾驶的传统车辆还是会存在。因此,在未来很长一段时间内,将会存在传统人工驾驶车辆和智能网联自动驾驶车辆并存的混合交通环境。智能网联车辆行为研究尚需充分考虑信息实时可靠和驾驶辅助可控等要求更高的城市环境与交通场景。现有微观车流模型体系中跟驰模型和换道模型的分离度较高,且换道场景中多车交互影响较为明显,而多数模型参数反映的是单一驾驶员的行为特征;因此从微观车辆间交互行为探讨换道行为特性更符合内在特征规律。
1 换道行为分析
智能网联技术的研究目的和意义在于减少日常交通中因人为因素引起的事故,提高车辆在行驶过程中的效率。因此车辆之间的协作能力尤为重要,换道行为是车辆行驶过程中的基本行为,车辆在行驶过程中需要获取更好的行驶环境产生换道的意图从而进行换道。
随着智能网联技术的发展和普及,中外学者相继建立了大量的车辆换道模型。其中Gipps[2]提出的基于间隙接受阈值的车辆换道模型为车辆换道的研究和发展开辟了道路。Peter[3]根据车辆换道时的相互作用将车辆的换道行为划分为自由换道、强制换道和协作换道。Worrall等[4]根据车辆系统动力学对车辆的换道轨迹进行分析,将换道行为划分为准备换道、执行换道和持续换道3个阶段:从车辆开始转向至到达目标车道线为准备阶段,至车辆整体穿过车道线为执行阶段,自车辆穿过车道线至车辆在目标车道上平稳行驶为持续换道阶段。Toledo等[5]将强制换道和自由换道统一考虑,建立了整合模型。Langar等[6]基于博弈论思想建立车辆的自适应巡航系统和换道系统的决策模型,该模型以车辆虚拟碰撞区域为博弈收益,具有较高的安全性。曲大义等[7]基于分层Logit模型对车辆换道行为进行研究,将车道的效用进行定性定量分析评定,为分析车辆间的行为交互特性提供理论基础。Ahmed等[8]采用三步法描述换道行为:首先具有换道动机的车辆做出换道决策,然后寻找可能并入的车道,最后等待时机执行换道,这是1种典型的基于规则的换道模型。
目前中外学者对车辆换道模型的研究多体现在车辆换道轨迹的预测以及车辆换道的最小间隙模型,缺乏对换道动机及换道行为对交通流影响的研究。智能网联环境下的车辆换道行为在满足安全的前提下,更应该考虑驾驶风格的多样化以及对公路的利用效率。现将从车辆的驾驶风格考虑,不同的驾驶风格存在不同的换道需求,以决策后车辆的速度为研究对象,建立在安全的基础上,提高公路利用效率的模型。
传统意义上根据车辆换道的动机将车辆的换道行为划为分为自由换道和强制换道。自由换道是驾驶员实施的非必要换道行为,具有较强的主观性和随意性,大多在决策过程中受到环境的影响而放弃。自由换道的场景如图1所示,在1条单向4车道中,3车道上的车辆VS的行驶速度受到前车的限制,达不到驾驶员的期望速度,从而产生换道意图。但是在换道过程中存在与2车道上的滞后车辆VF发生碰撞的风险从而取消换道行为。因此自由换道行为是非必要性的。现主要研究自由换道。

图1 车辆自由换道Fig.1 Vehicles’ discretionary lane-changing
2 博弈行为特征
作为1种决策方式,博弈论为含有竞争倾向的问题提供了解决方法和分析手段,被广泛应用于各个领域中。近几年来,中外研究人员建立众多在博弈论思想下的车辆换道模型。Kita[9]提出将博弈论与车辆的换道行为结合。Talebpour等[10]将混合车流下的换道行为看作是非合作博弈行为。Bell[11]利用博弈论对高速公路交通进行建模来研究车辆换道对交通流运行的影响。
2.1 博弈的分类
每1个博弈的主要构成要素包括参与者、每个参与者所采取的策略以及参与者采取相应的策略所带来的收益函数。根据博弈双方的期望收益,可以将博弈划分为合作博弈与非合作博弈。在合作博弈的情况下,博弈双方组成联盟,在合作的基础上共享信息;在非合作博弈下各参与者的策略为自身利益出发,博弈双方不存在交流。非合作博弈下根据参与者行动顺序的可见性和参与者信息的完整性可分为完全信息动态博弈、完全信息静态博弈、不完全信息动态博弈和不完全信息静态博弈4种类型。
2.2 纯策略和混合策略下的纳什均衡
当1个博弈在进行时,每个参与者都有不同的策略合集,策略合集的表达式为
S={S1,S2,…,Sn}
(1)
表1所示为一个二人非合作博弈的收益矩阵,假设每个参与者都有1组可用的策略,参与者1的策略合集为S1={r1,r2},参与者2的策略合集为S2={t1,t2}。记两个参与者使用不同的决策时产生的收益函数为u,例u1(r1,t1)为参与者1使用r1策略和参与者2使用t1策略时对参与者1产生的收益函数。

表1 博弈收益矩阵Table 1 Payoff matrix
如果矩阵中存在纯策略(rn,tn)使式(2)成立,则称纯策略(rn,tn)为博弈的纯策略纳什均衡,即
(2)
当一个非合作博弈不存在纯策略纳什均衡时,根据纳什均衡[12]定义可知,任何1个给定的二人博弈一定存在混合策略纳什均衡。混合策略纳什均衡是纯策略结合概率论所得出的结果。表2给出的是1个二人非合作混合策略博弈。参与者1的策略合集为S3={s1,s2};参与者2的策略合集为S4={c1,c2}。其中参与者1对选择策略s1的概率为p,则选择s2的概率为1-p。同理假设参与者2选择策略c1的概率为q,则选择c2的概率为1-q。可以得到如表2所示的收益矩阵。

表2 混合策略博弈收益矩阵Table 2 Mix strategy payoff matrix
表2中参与者1和参与者2的期望收益可分别表示为
(3)
通过对式(3)中参与人1的收益函数对p求导并令其导数为0可得p为
(4)
同理参与人2的收益函数对p求导并令其导数为0,得q为
(5)
当博弈中不存在纯策略纳什均衡时,参与者1和参与者2必须分别遵循上述概率p和q进行随机选择才能得到混合策略博弈的纳什均衡。
3 驾驶风格分析
不同驾驶风格下的车辆最优行驶速度存在差异,目前关于驾驶风格的研究有: Langari等[13]基于车辆行驶状态下的加速度的平均值与标准差的比值对车辆行驶风格进行划分;Murphey等[14]对车辆行驶中车体的冲击度进行分析实现对车辆行驶风格高精度的划分;李经纬等[15]提出基于K-means聚类的驾驶风格识别方法,对于将驾驶风格分为3类的情况具有良好的分类效果。
NGSIM(next generation simulation)是当今最大的自然车辆轨迹数据集,被广泛用于驾驶员模型和交通流的研究。选用NGSIM数据集中的US101交通数据[16]研究车辆的驾驶风格。
应用文献[14]的方法对US101数据集中的行驶风格划分为激进型、标准型和平静型。文献[14]对车辆行驶过程中的冲击度进行分析,提出了驾驶风格识别系数Rdriver,并验证了该方法的可靠性和准确性。冲击度J(t)的定义为
(6)
式(6)中:v(t)代表车辆的行驶速度,驾驶风格识别系数Rdriver的定义为
(7)

图2 标准型驾驶风格车辆速度、加速度和冲击度Fig.2 Comparison of speed, acceleration and jerk of standard driving styles
根据Rdriver对US101数据集中的1 914条车辆轨迹数据进行驾驶风格的划分,得到激进型驾驶风格593份、标准型驾驶风格827份、平静型驾驶风格494份。
对3组不同风格的数据进行统计分析,观察车辆在不同驾驶风格下的速度特点。各个驾驶风格下的速度分布如图3所示,整体看来每个驾驶风格下的最优速度近似服从正态分布。

图3 3种驾驶风格下的最优速度分布Fig.3 Optimal speed distribution for three driving styles
最终取平静型驾驶风格的最优速度为vb1=12 m/s;标准型驾驶风格的最优速度为vb2=15 m/s;激进型驾驶风格的最优速度为vb3=18 m/s。
4 换道行为模型
考虑到智能网联技术的发展现状以及自主车辆的普及程度,分别针对自主车辆与混合车辆以及自主车辆之间的换道行为进行建模。由于自主车辆与人类驾驶员驾驶的传统车辆之间不存在车辆行为交互作用,即无法构成换道时的博弈,根据车辆换道时的最小距离模型对其进行换道行为建模;自主车辆之间存在行为交互作用,对其采用博弈论的思想进行建模。
4.1 自主-传统车辆换道模型
车辆在行驶过程中,若前方出现大型车辆、障碍物、或前方车辆行驶过慢达不到自己的期望速度时,会产生换道的意图,此种换道类型属于自由换道。如图4所示,单向双车道环境,车辆VS在1车道行驶时识别到前方车辆VL速度达不到自己的期望速度,于是以2车道为目标车道产生换道意图。

图4 车辆换道过程示意图Fig.4 Schematic diagram of vehicle lane changing process
假设车辆以决策时的瞬时速度和加速度做匀加速或匀减速运动,经过时间Δt后车辆VS到达t1时刻位置。此时车辆VS与其前导车辆VL之间的距离为SLead,与目标车道上的滞后车辆VT的距离为SLag。其中SLead和SLag为
(8)
(9)
式中:vS、vL、vT分别为受试车辆、前导车辆和滞后车辆的速度;aT、aL分别代表前导车辆和滞后车辆的加速度;aS代表受试车辆的最大加速度;S1、S2分别为决策时受试车辆与前导车辆和滞后车辆的距离;LS和LLead分别为受试车辆和前导车辆的长度。
如图5所示,受试车辆VS的安全区域由SLead、SLag、LS和道路的宽度W决定。
图5中车辆后方安全面积ALag、前方安全面积ALead和侧面安全面积AS计算式为

XLag为车辆的后方最小安全距离;XLead为车辆的前方最小纵向安全距离;ALag为车辆后方安全面积;AS为侧面安全面积;ALead为前方安全面积图5 车辆安全区域模型Fig.5 Vehicles’ safety area model
(10)
根据车辆在执行换道行为时的速度、加速度和转向角可确定车辆换道所需要的最小安全距离。车辆在执行换道行为时的状态如图6所示。

t为执行换道所需时间;θ为车辆的最大转角图6 换道状态示意图Fig.6 Schematic diagram of lane-changing status
车辆的前方最小纵向安全距离XLead为
XLead=t(v0+ΔtaS)cosθ
(11)
车辆的后方最小安全距离XLag为
(12)
车辆的最小安全区域为
(13)
当满足式(14)时,车辆执行换道。
(14)
4.2 自主-自主车辆换道模型
在智能网联技术下,自主车辆之间存在行为交互作用,自主车辆之间的换道也称为协作换道。基于博弈论思想进行建模,车辆换道决策流程如图7所示。基于博弈论思想进行建模,当车辆产生换道意图后,首先选择效益最高的目标车道。然后受试车辆获取目标车道上的车辆信息,确定博弈对象组成博弈。以决策后的速度与最优速度的拟合度作为收益函数,从而得到该博弈的混合策略纳什均衡,如果受试车辆的策略为换道,则计算执行换道时的安全区域。在受试车辆的安全区域不小于最小安全区域情况下,受试车辆执行换道。

图7 车辆换道决策流程Fig.7 Flow chart of vehicle lane changing decision
本模型中受试车辆拥有S1={换道,不换道}策略集,“换道”策略的选择概率为p;目标车道上的车辆具有S2={接受换道,不接受换道}的策略集,“接受换道”策略的选择概率为q。
收益函数是博弈中不可或缺的成分。近年来,研究者多采用车辆的安全系数为收益函数进行博弈,但是车辆安全系数的量化具有一定的局限性。所以将博弈决策后车辆的速度与该驾驶风格下最优速度的拟合度作为收益函数,并且加入车辆安全区域模型以保证车辆的行驶安全。
博弈的收益矩阵如表3所示,其中s1、s2分别代表受试车辆的“换道”和“不换道”策略;c1、c2分别代表滞后车辆的“接受换道”和“不接受换道”策略;u1(s1,c1)代表受试车辆选择“换道”策略,滞后车辆选择“接受换道”时受试车辆的收益函数。

表3 模型博弈收益矩阵Table 3 Game payoff matrix of model
受试车辆的收益函数共有u1(s1,c1)、u1(s1,c2)、u1(s2,c1)和u1(s2,c2)4种情况。当受试车辆采取“换道”策略且滞后车辆采取“接受换道”策略时,受试车辆的速度变化为执行换道后的速度与决策前速度的差值;当受试车辆采取“换道”策略但滞后车辆采取“不接受换道”策略时,受试车辆加速准备换道,滞后车辆以一定加速度行驶,阻止换道行为的执行。为避免出现纯策略纳什均衡导致事故的发生,需对u1(s1,c2)、u2(s1,c2)的值进行权衡。当受试车辆采取“换道”策略且滞后车辆采取“接受换道”策略时,为使滞后车辆的速度损失最小化,引入车辆的安全距离模型。根据各个车辆的距离、速度和加速度等可观测信息,滞后车辆的加速度可由式(15)求出。
(15)
博弈中受试车和滞后车各策略下的收益函数为
(16)
式(16)中:vbS为受试车所属驾驶风格的最优行驶速度;vfS为受试车在该执行该策略所能达到的最终速度;vbT为滞后车所属驾驶风格的最优行驶速度;vfT为滞后车在执行该策略所能达到的最终速度。
本文中模型的博弈类型属于混合策略博弈,根据式(4)、式(5)得到各参与者对策略的选择概率,从而得到该博弈的混合策略纳什均衡。得到博弈的纳什均衡后,计算该策略下的车辆安全区域,如果符合式(14),受试车辆执行换道行为。
5 实验结果与分析
使用SUMO软件对模型的性能进行仿真实验。作为交通仿真软件,SUMO软件得益于它的开源性从而引得广大交通领域学者的使用。为避免目的地、信号灯以及行人等因素的影响,仿真的场景为1条限速120 km/h、长度为2 000 m的单向4车道路段。根据前文中对US101数据集分析的结果将平静型、标准型和激进型3种驾驶风格的车辆数量以26∶43∶31的比例划分,根据车流的组成及车辆换道策略模型分为A、B、C 3个实验组,其中A组车流使用传统换道模型,B组车流使用最小安全区域模型,C组车流使用博弈换道模型。再根据密度区间为2 000~4 000 m对每1组车流进行9组实验,每组实验持续6 min。传统车辆和自主车辆的参数如表4所示。

表4 仿真车辆参数Table 4 Parameters of Simulation vehicle
本次实验以车辆的平均速度、事故数以及6 min内的车辆通过数作为评定目标,分析模型的性能。仿真实验如图8所示,蓝色车辆为传统车辆,粉色车辆为自主车辆。对3种模型平均速度的仿真结果如图9所示,车辆的通过数仿真结果和事故量分别如图10、表5所示。实验结果显示:当车流密度小于3 250 veh/h时,博弈换道模型的车辆平均速度和最小安全距离模型的车辆平均速度均要明显高于传统换道模型,其中博弈换道模型更具优势。随着车流密度的升高,车辆间的换道次数减小,博弈模型的优势变得不那么明显,3个模型的平均速度趋于相同水平;从车辆通过数分析,在车流密度为2 250 veh/h以上时,博弈换道模型的优势变得明显,随着车流密度的提高,博弈换道模型的通过数始终高于前两种模型,说明博弈换道模型对道路有更高的利用效率;随着车流密度的提高,传统模型的事故数有上升趋势,最小安全区域模型的事故数保持较低的状态,而博弈模型事故数始终为0,说明博弈模型具有更好的安全稳定性。

图8 仿真实验Fig.8 Simulation experiment
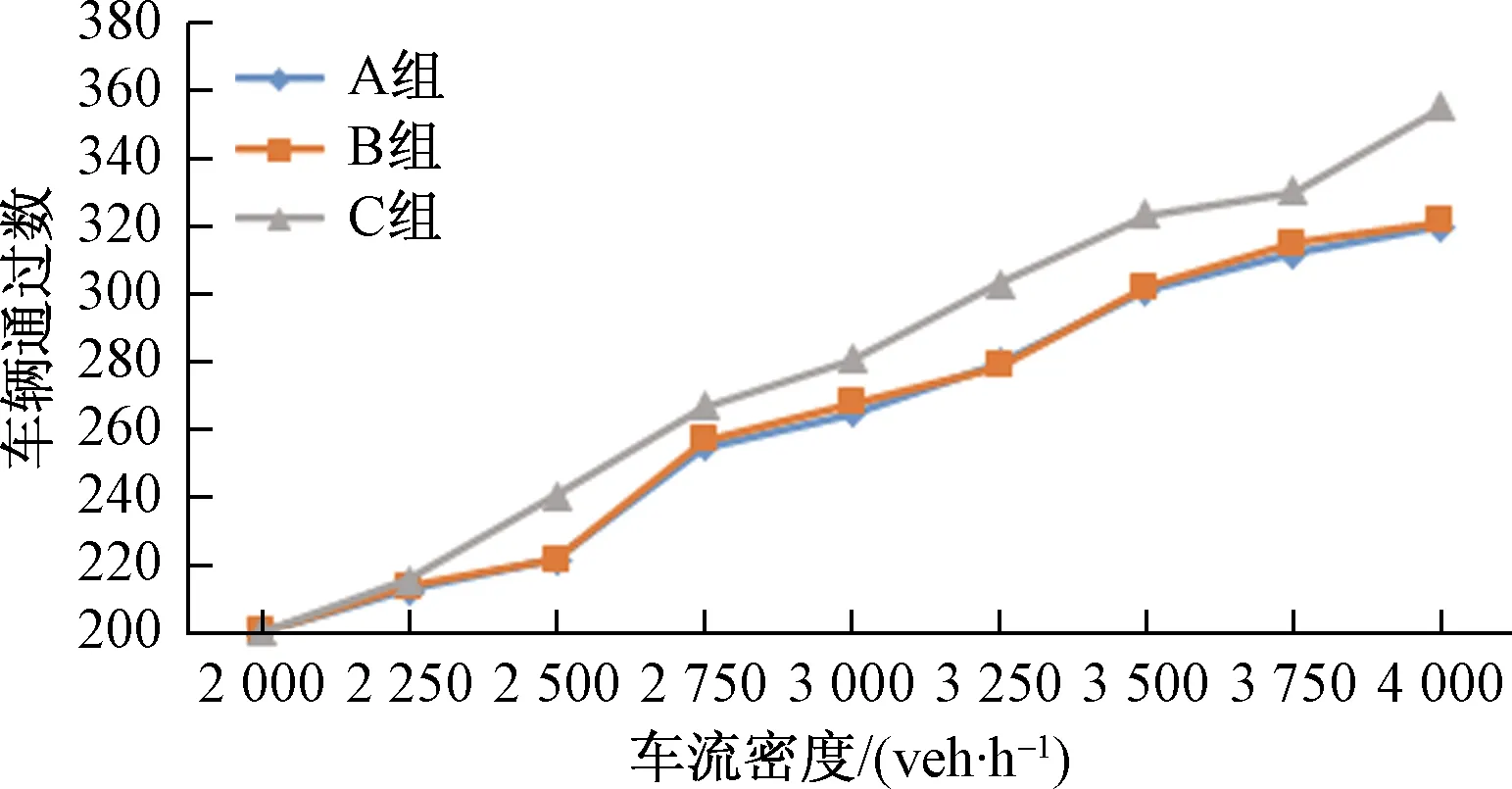
图10 3种模型下的车辆通过数对比Fig.10 Comparison of vehicle passing numbers under three models

表5 3种模型下事故数对比Table 5 Comparison of accident number under three models
6 结论
利用博弈论的思想对车辆的换道行为进行建模,根据车辆的当前状态和预期效果求得车辆的预期安全区域和最小安全区域。通过SUMO软件对模型进行仿真实验,得到以下结论。
(1)基于混合车流和自主车流建模的方法适用于将来的研究情况。
(2)博弈模型在车道的利用率和安全性都要高于传统的间隙阈值接受模型。
将结合车辆动力学对车辆换道时的参数进行更进一步的细化,提高模型的准确性,从而结合智能网联技术制定更符合实际换道场景的车辆换道模型。
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
汽车实用技术(2022年5期)2022-04-02
卫星应用(2021年11期)2022-01-19
电子制作(2019年11期)2019-07-04
电子制作(2019年11期)2019-07-04
扬子江(2019年3期)2019-05-24
辽河(2019年2期)2019-03-22
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
汽车与安全(2017年7期)2017-09-12