某型初级教练机燃油测量系统改进研究
2021-04-07 05:38陈雄昕谢艳娇雷明章韩亦俍
教练机 2021年1期
陈雄昕,谢艳娇,雷明章,韩亦俍
(航空工业洪都,江西 南昌,330024)
0 引 言
某型初级教练机是我国于20 世纪50 年代末完全独立自主研制的一代经典教练机,其凭借良好的气动外形,可靠耐用的操作系统,优异的低空低速性能广受飞行员及飞行爱好者的好评。 时隔60 多年后的今天,该型飞机依然活跃于我国各大航空院校,甚至蜚声海外。 随着我国飞行员与国际交流的日益频繁,其他国家关于飞行员培养的先进理念对我国空军和民航的训练体系产生了越来越深远的影响。为培养一支具有先进理念并与国际接轨的飞行员队伍,不论是空军还是民航学院,对飞行员的训练要求正在逐步提高。 另一方面,高级教练机与初级教练机之间的技术性能和操作方式差距正变得越来越大,从而产生某型初级教练机原有的座舱仪表板已不能适应衔接更高一级教练机训练任务的问题。 因此,某型初级教练机需在座舱内改装与高级教练机类似的综合显示器,从初级训练时就纠正和引导飞行员的驾驶习惯,使其更容易进入高级训练阶段。
本文将介绍某型初级教练机燃油测量系统为适应综合显示器而作的改进研究,并就此进行仿真分析。
1 某型初级教练机燃油测量系统简介
某型初级教练机的燃油测量系统主要由分别安装于左/右机翼油箱的燃油测量传感器以及安装于座舱内的油量表组成。
燃油测量传感器为浮子式可变电阻传感器,内置一个滑动变阻器。 当油箱内的油面高度发生变化时,传感器浮子上下移动,由连杆机构带动滑动变阻器的滑动片移动,从而改变传感器两端的电阻比值,其结构如图 1 所示。

图1 燃油测量传感器结构
油量表内装有磁电式流比计,油量表指针与流比计线框相连。 当传感器两端电阻比值改变时,流过流比计线框的电流发生改变,从而使作用于线框上的两个力矩跟随变化,使得油量表指针在此新力矩的作用下转动到平衡位置,飞行员即可通过仪表周围的刻度读取油量数值。
综上所述, 油箱油量V 是关于油量表指针旋转角度 θ 的函数,即 V=f(θ)。 因此,只需建立油箱油量与指针旋转角度的映射关系,即可测得油箱油量。
飞机座舱内改装综合显示器后,原有的油量表将被取消,由综合显示器显示油箱油量,这将带来3 个问题:
1) 如何将原有的物理信号转化成综合显示器能够读取的数字信号;
2) 如何修正过大的机动动作带来的油量测量误差;
3) 转化成数字信号后如何减少采集到的尖峰数据对油量数据的影响,防止读数剧烈波动。
下文将对上述3 个问题分别进行阐述。
2 信号转化
由第1 章的介绍可知,某型初级教练机燃油测量系统的物理量转化关系如下:
油量变化→油面高度变化→电阻变化→电流变化→力矩变化→油量表指针旋转角度变化。
其中较易测量的物理量为燃油测量传感器的电阻与电流,因此,该型初级教练机燃油测量系统改装的思路就是将测量得到的电阻或电流信号,转化为飞行员可读的油量信号。
单个机翼油箱容积为130L, 满油时载油量为112L,膨胀空间为18L。加油时,燃油测量传感器的浮子随着油面一起上涨;当加油量达到或超过112L 时,机翼油箱精心设计的巧妙结构将限制浮子继续上浮,使得滑动变阻器阻值不变,从而将油量表最大显示值限制为满油油量,即112L。
当燃油消耗殆尽, 由于油箱内筋条等结构的限制,仍将有一小部分燃油无法通过输油管流出,这一部分燃油称为不可用燃油,约为2L。
综上所述,燃油测量传感器的浮子被油箱限制在不可用燃油油面与满油油面之间,因此,可通过实验测得滑动变阻器电阻R、油面高度h 以及油箱油量V的关系。
3 修正飞行姿态影响
某型初级教练机燃油测量传感器的浮子和连杆机构的活动范围受到油箱特殊外形的限制,导致飞机在某些姿态下浮子的位置无法反映油箱的真实油量,使油量测量误差增大。 因此,需在油量解算时加入一些特殊处理,修正特殊姿态下的油量测量值,防止误差较大的油量读数对飞行员产生误导。
3.1 各姿态下油量测量误差分析
将机翼油箱置于不同的飞行姿态下,记下此姿态下燃油测量传感器测得的油量值,并与此时油箱油量进行比较,得到不同飞行姿态下燃油测量传感器的测量误差曲线,如图 2 和图3 所示。

图2 俯仰角对测量误差的影响
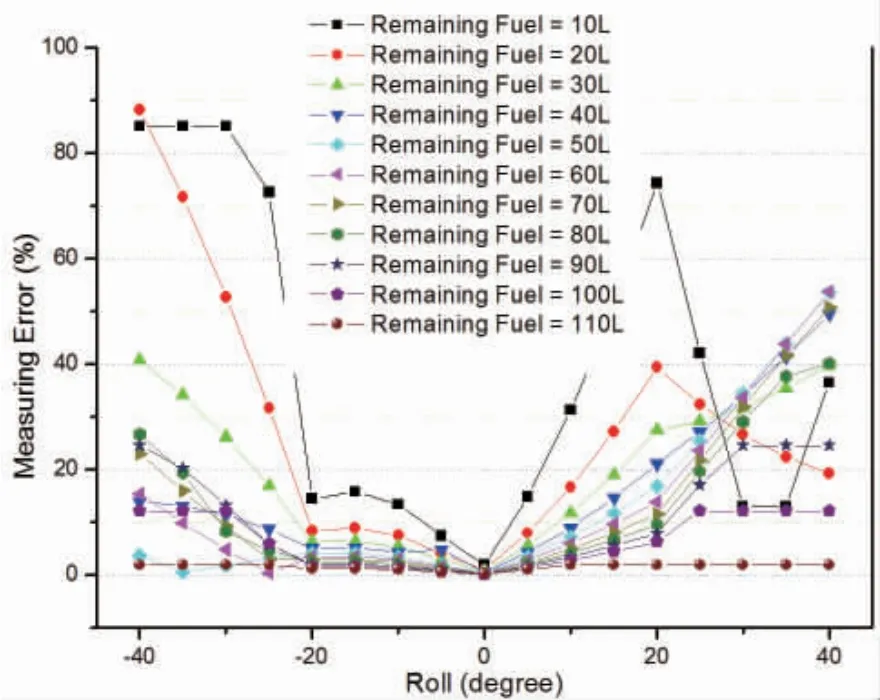
图3 滚转角对测量误差的影响
注:俯仰角变化范围:[-40°,40°],滚转角变化范围:[-40°,40°],油箱剩余油量变化范围:[10L,110L]。
由图 2 和图3 可得出如下结论:
1) 油箱内剩余油量较多时,飞机姿态角对测量误差的影响较小,此时,燃油测量传感器的测量数据较为可信。
2) 当油箱内剩余油量较少,尤其是剩余油量低于30L 时,飞机姿态角对测量误差的影响较大,若飞行员在此时进行较大的机动飞行,可能导致浮子处于移动范围的边界位置,从而产生较大的测量误差。
3) 飞机剩余油量大于 30L,俯仰角位于[-40°,-5°)和(5°,40°]时,燃油测量传感器的测量误差最大可达到 40%;俯仰角位于[-5°,5°]时,燃油测量传感器的测量误差最大为4.2%。
4) 飞机剩余油量大于 30L,滚转角位于[-40°,-5°)和(5°,40°]时,燃油测量传感器的测量误差最大可达到 53.8%;滚转角位于[-5°,5°]时,燃油测量传感器的测量误差最大为4.9%。
综上所述,飞机姿态角,尤其是滚转角对这种浮子式燃油测量传感器的测量误差影响极大, 因此,必须在飞机姿态角过大时对测量读数进行修正。
3.2 油量测量读数修正
由3.1 节可知,飞机姿态角对燃油测量传感器的测量误差影响极大, 因此考虑在飞机机动飞行时,通过发动机耗油量对油量测量进行补偿,使其更为贴近油箱实际油量。
定义飞机俯仰角或滚转角超过±5°时为测量屏蔽区。 屏蔽区内,燃油测量传感器测得的油量不作为油箱油量参数发送给综合显示器,此时,综合显示器显示的油量为飞机恰好进入屏蔽区时的油量读数减去发动机耗量在这段时间内的积分所得到的数值,用公式表示如下:
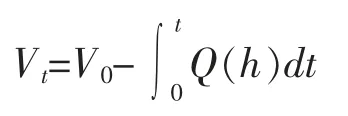
式中:
V—飞机处于屏蔽区时,t 时刻的油箱油量读数;
V—飞机恰好进入屏蔽区时的油箱油量读数;
Q(h)—发动机耗量。
依据飞行高度不同,发动机耗量如表1 所示。

表 1 发动机耗量
4 测量结果后处理
飞机飞行过程中常常产生机身或机翼的小幅抖动,这种现象将造成油面持续晃动;此外,燃油测量系统还有可能受到机上复杂电磁环境的干扰。上述现象将导致油量测量结果产生较大的浮动,使飞行员难以判断此时油箱内的实际油量。为了保证燃油测量结果的稳定性和准确反映油箱中的实际油量,需要对浮动的油量测量结果进行后处理,以消除那些不能真实反映实际油量的测量值。
平滑滤波是飞机燃油测量系统常用的后处理方法之一,其原理是按照一定的频率对燃油测量传感器采集的物理量进行采样, 以最新的N 个数据作为样本,取该样本的平均值作为计算油箱油量的输入。
某型初级教练机燃油测量系统可采用平滑滤波的方式对采集的电阻值进行后处理, 采样频率为2Hz,样本容量N 为15。 该后处理方法可有效过滤掉系统采集的杂点,使得飞行员观察到的油量读数变化趋于平滑。
5 燃油测量系统仿真分析
本章节所做的仿真分析基于AMESim 仿真平台。
5.1 飞行剖面
本节选取了某型初级教练机典型的飞行剖面作为仿真剖面,仿真剖面中主要包含爬升、巡航、盘旋、滚转、下降和着陆等飞行阶段,各飞行阶段的飞机状态参数如表 2 所示。
5.2 仿真计算
为减少计算量,提高计算速度,仿真模型进行了简化,取消了一些不必要的管路或机载成附件,并且只计算了左机翼油箱油量测量值(左、右机翼油箱呈对称分布,右机翼油箱可进行类比分析)。搭建的仿真模型如图 4 所示。
仿真模型由仿真剖面输入模块、燃油系统仿真模型、燃油测量系统仿真模型三个部分组成。 仿真剖面输入模块可读取输入的飞行参数和环境参数;燃油系统仿真模型可依据仿真剖面, 实时计算油箱实际油量、油面高度、燃油测量传感器浮子位置和滑动变阻器电阻等参数,并将其输出;燃油测量系统仿真模型可依据飞机姿态角、飞行高度、滑动变阻器电阻等参数,经过姿态角处理、耗量积分、油量解算和后处理,实时输出左机翼油箱的测量油量读数。
5.3 仿真结果与分析
仿真计算结果如图 5~图7 所示。
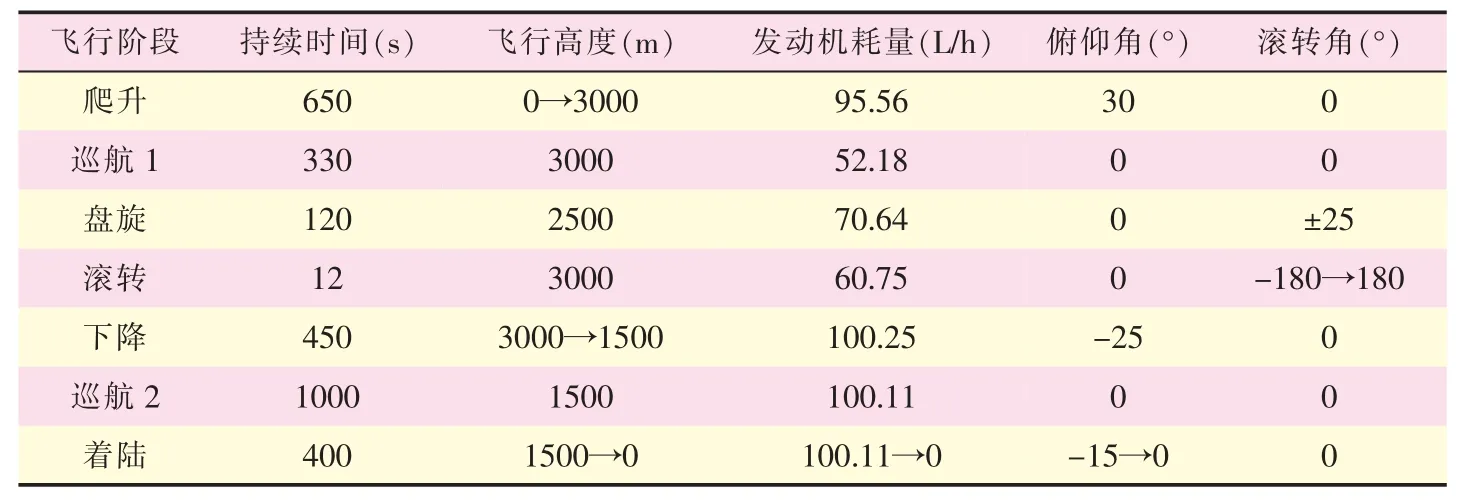
表 2 典型飞行剖面
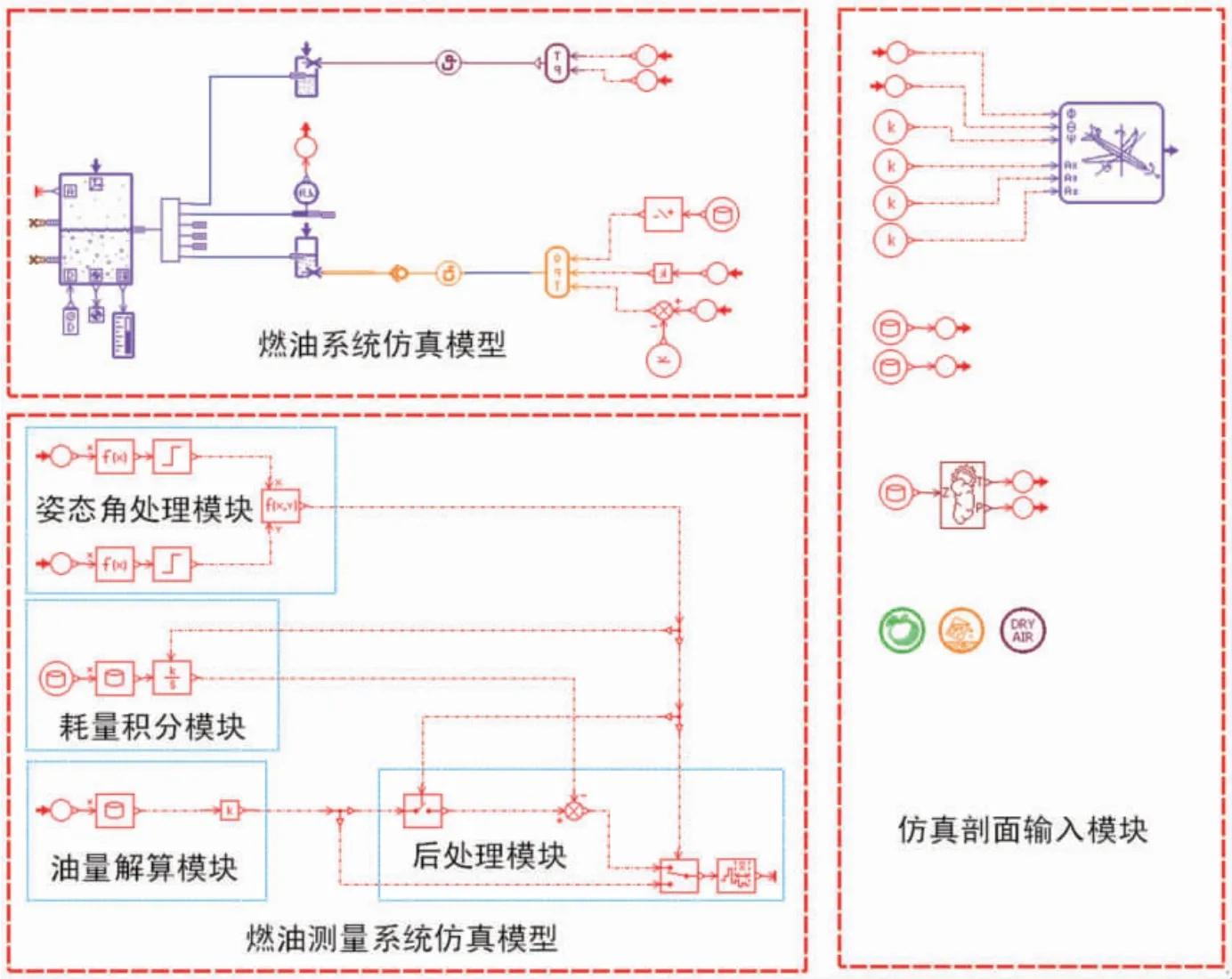
图 4 仿真模型

图5 实际油量与测量油量
图中给出了飞行高度、飞机姿态角以及油量数据;其中,天蓝色线为飞行高度;深蓝色线为油箱实际油量,红色线为测量油量;绿色为飞机滚转角,灰色为飞机俯仰角。

图6 ±25°盘旋时实际油量与测量油量
图中,深蓝色线为油箱实际油量,红色线为测量油量。
表3 对比了各个飞行阶段油量测量误差达到最大时的各项数据。

图7 滚转时实际油量与测量油量
仿真计算结果表明:
1) 某型初级教练机以典型飞行剖面进行飞行训练时, 测量油量的读数与实际油量基本保持一致,读数变化平滑,未产生较大的瞬时波动。
2) 飞机处于水平姿态时, 油量测量误差可保持在0.5%以下。
3) 飞机作短时机动动作(例如盘旋和滚转)时,油量测量误差不大于2%。
4) 飞机爬升或下降时, 油量测量误差最大可达4.32%。 这是由于飞机爬升或下降的时间较长,且均以一定的俯仰角(超过±5°)飞行,导致飞机长时间处于燃油测量系统的测量屏蔽区内。 在这段时期内,燃油测量系统输出的油量为依据发动机耗量计算出来的理论油量。 由于发动机状态随时在变化,燃油消耗量将在表1 给出的耗量值上下浮动。 因此,若飞机长时间位于屏蔽区内, 燃油测量系统的误差将逐渐累积,直至飞机改出。

表 3 各飞行阶段最大测量误差
6 结 论
某型初级教练机燃油测量系统为适配座舱综合显示器,将油箱油量与仪表指针旋转角度的映射关系变更为油箱油量与滑动变阻器阻值的映射关系,使得燃油测量传感器的输出信号变为可直接测量的物理量; 测得的电阻信号经过油量解算变为油量信号,再经姿态修正和平滑滤波后送入综合显示器供飞行员查阅。
经仿真计算,结果表明:燃油测量系统输出读数变化平滑;飞机处于水平姿态时,油量测量误差可保持在0.5%以下;飞机作短时机动动作(例如盘旋和滚转)时,油量测量误差不超过2%;飞机爬升或下降时,油量测量误差不超过5%。
若后续能收集到更为精确的发动机耗量数据作为测量读数修正依据,将进一步提高该燃油测量系统的测量精度。