服装面料自动抓取转移方法的研究进展
2021-04-06 05:22:46刘汉邦李新荣刘立东
纺织学报 2021年1期
刘汉邦, 李新荣, 刘立东
(1. 天津工业大学 机械工程学院, 天津 300387; 2. 天津市现代机电装备技术重点实验室, 天津 300387)
服装行业属于劳动密集型产业,由于劳动力成本的上升、技术的提高、多品种少批量、私人定制等原因,致使对操作工的技术要求和生产成本都不断提高,研发服装专业机器人来代替操作工的需求增大。当前服装面料抓取转移主要靠人工来完成,自动抓取转移在服装生产中并没有得到很好的应用。最主要的原因是服装面料具有一定的透气性,并且容易遭到外力的破坏,导致面料内部结构损伤或外表面产生瑕疵。
服装面料自动化抓取转移过程是一个非常复杂的问题,不同材质面料选择的抓取转移方式也不一样。实际的抓取转移过程中,对于机器人末端执行器的设计往往取决于被抓取物的特性,例如布料柔软且容易遭到表面破坏,所以就要求末端执行器不能损坏服装面料的外观。目前面料自动抓取转移的主要方法有机械手抓取[1]、负压吸附、静电吸附[2-3]和非接触式吸盘吸附[4-6]等4种。面料自动抓取转移过程可分为寻找物体、夹住物体、提升物体、移动物体和释放物体等过程[7-8]。在自动抓取转移面料过程中,由于面料的柔软性,在末端执行器释放面料且与工作台对接时,容易产生对接偏差,所以还需要考虑抓取精度和移动过程物体受到的空气阻力等问题。可见,要想实现服装面料的自动化抓取转移还是具有一定的难度。
本文阐述了上述抓取转移方式的应用原理,针对当前不同材质面料采用何种抓取转移方法的问题,分析了上述抓取转移方法在制造成本、能耗、工作环境和定位精度等方面的优缺点,总结出当前该领域的研究进展和应用状况,以期为不同材质面料选择何种抓取转移方法提供最佳方案,并预测了上述4种抓取转移方法未来的研究方向。
1 服装面料自动抓取转移方法及应用
1.1 机械手抓取转移
机械手抓取是仿照人类手指的活动规律而研发的一种重要执行机构,可用来握持刚性工件[9-10],也可用来抓取转移柔软的毛巾[11-13]。在过去的几十年中,机械手抓取转移方式已被应用到各种工业领域,但在服装行业中,机械手抓取仅有十几年的历史。为了实现面料的抓取转移,Nagata等[14]设计了一种多指机械手,该机械手如图1所示。该机械手将单个功能手指动作定义为原始动作,而在抓取和操作中使用不同原始动作的手指称为功能手指分离。通过将不同的原始动作一起联动,可实现多种抓取和操作,但这种机械手抓取转移方式,对机械手指的材料具有一定的光滑度要求[15],否则在抓取昂贵面料的时候,容易使面料表面产生划痕、抽丝等缺陷。尤其是对于丝绸等昂贵的面料而言,在实际应用中不允许有瑕疵出现,所以这种机械手抓取转移方式比较适用于抓取毛巾等有粗糙表面的单层面料。Lee等介绍了一种基于形状记忆合金的可变硬度软机械手[16],此机械手使用了3个可变硬度的机械手指,可用来抓取不同硬度的工件,可成功抓取柔软毛巾和鞋服面料,若在服装行业中,使用该机械手抓取面料,或许可弥补刚性机械手对面料产生表面划痕的缺陷。Glick等[17]设计了一种利用壁虎胶黏剂独特性能的抓取器,受壁虎启发的黏合剂是一类具有微结构表面的材料,可利用范德华力产生黏合力[18],该黏合剂不仅可用于黏合抓取,而且可显着增强摩擦性能,与非壁虎式抓取机构相比,该机构的抓取能力明显增强。

图1 多指机械手照片
机械手抓取转移方式对工作环境要求较低,可以适应大部分车间的生产要求。在服装面料的抓取转移过程中,机械手的任务不仅仅是抓取面料,更重要的是把面料转移到工作台。在转移过程中,要求面料和机械手无相对运动,以保证面料在与工作台接触时定位准确,但实际上,机械手转移面料势必会产生周期性摆动和惯性力,导致面料与工作台接触时定位精度降低,面料废品率增加。目前在机械手抓取面料的相关研究中,机械手抓取由于容易致使面料表面产生缺陷,故主要抓取粗糙的面料。若与Lee等[16]提到的软体机械手思想结合,对面料表面缺陷问题可提供一种新的解决办法;若与Glick等[17]提到的壁虎胶黏剂抓取器结合,面料转移过程中的定位精度或许可得到提升。
1.2 负压吸附抓取转移
负压吸盘是利用大气压力与吸盘内腔的真空压差作用对面料进行吸附和抓取。具体的吸附过程为,吸盘的吸嘴与面料接触后,用真空发生装置抽取吸盘内部腔室的空气而形成内部真空,此时由于内部压力小于大气压力[19],面料在内外压差的作用下与吸盘贴合,从而完成面料的抓取过程。真空发生装置提供的真空度越高,吸盘的抓取能力就越强,吸附原理[20]如图2所示。
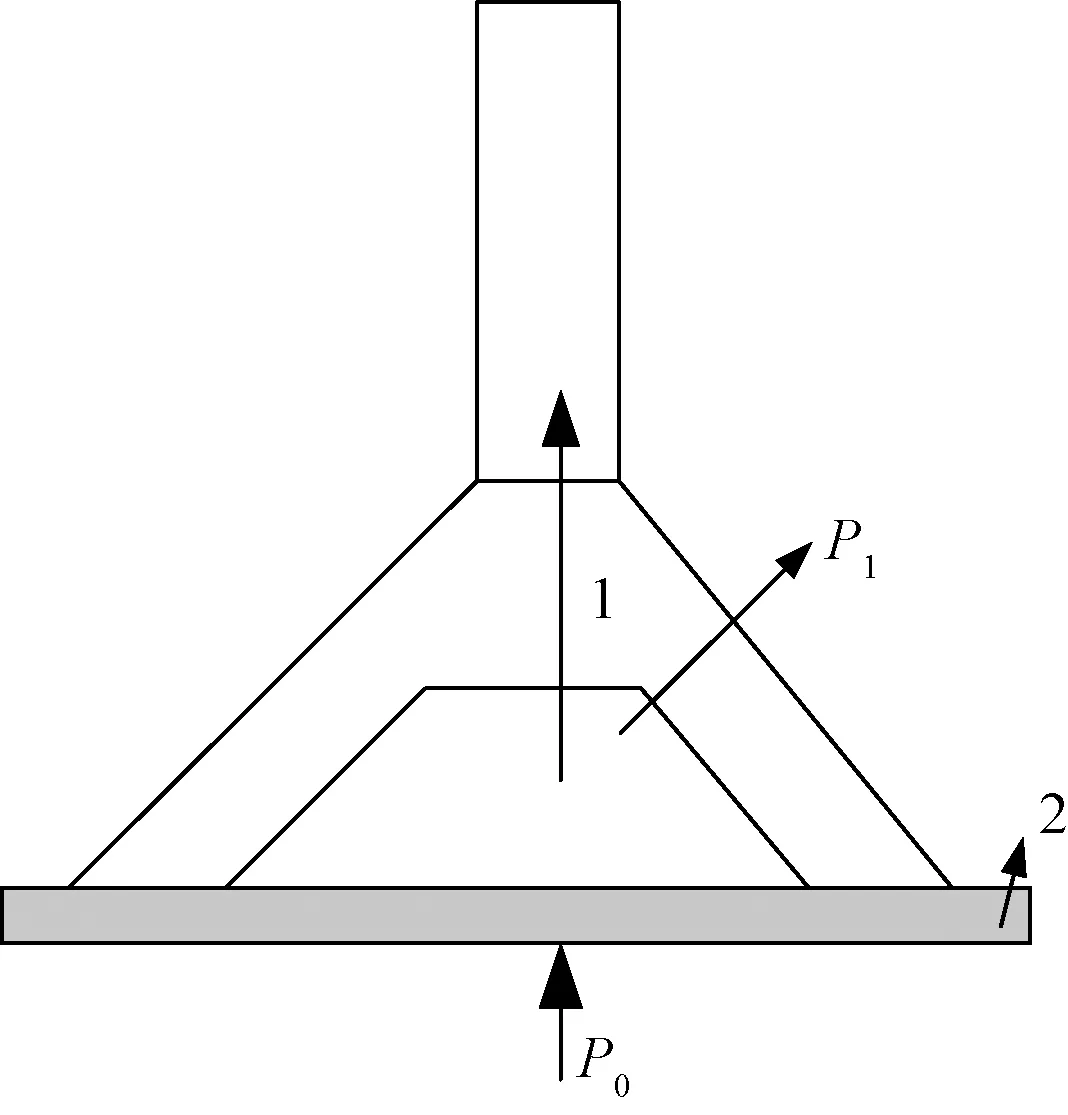
注:P0为大气压;P1为真空压力;1为气流; 2为面料。
对于负压吸附方式,在处理小直径孔隙的服装面料时是一件相对容易的事情。换句话说,其在吸取孔径大、高弹、透气的服装品时存在一定的问题,例如碳纤维增强基复合材料(CFRP)制作的服装品或一些其他的复合材料[4]。因为负压吸附是基于真空发生器的供给流量产生气流来抽空容器中空气,使吸盘与面料产生压强差,从而达到吸取面料的目的。如果面料孔径大、渗透性强,则腔内气压和大气压基本一样,这样就使得负压吸盘吸取面料的可靠性大幅下降。Failli等对过负压吸附非刚性材料进行研究[21],其实验图片如图3(a)所示,该吸附装置可轻松吸取皮革等柔性物件。Cubric等[22]也利用负压吸附的原理进行了少孔的PES2非织造材料的实验,材料在显微镜下放大50倍的照片如图3(b)。
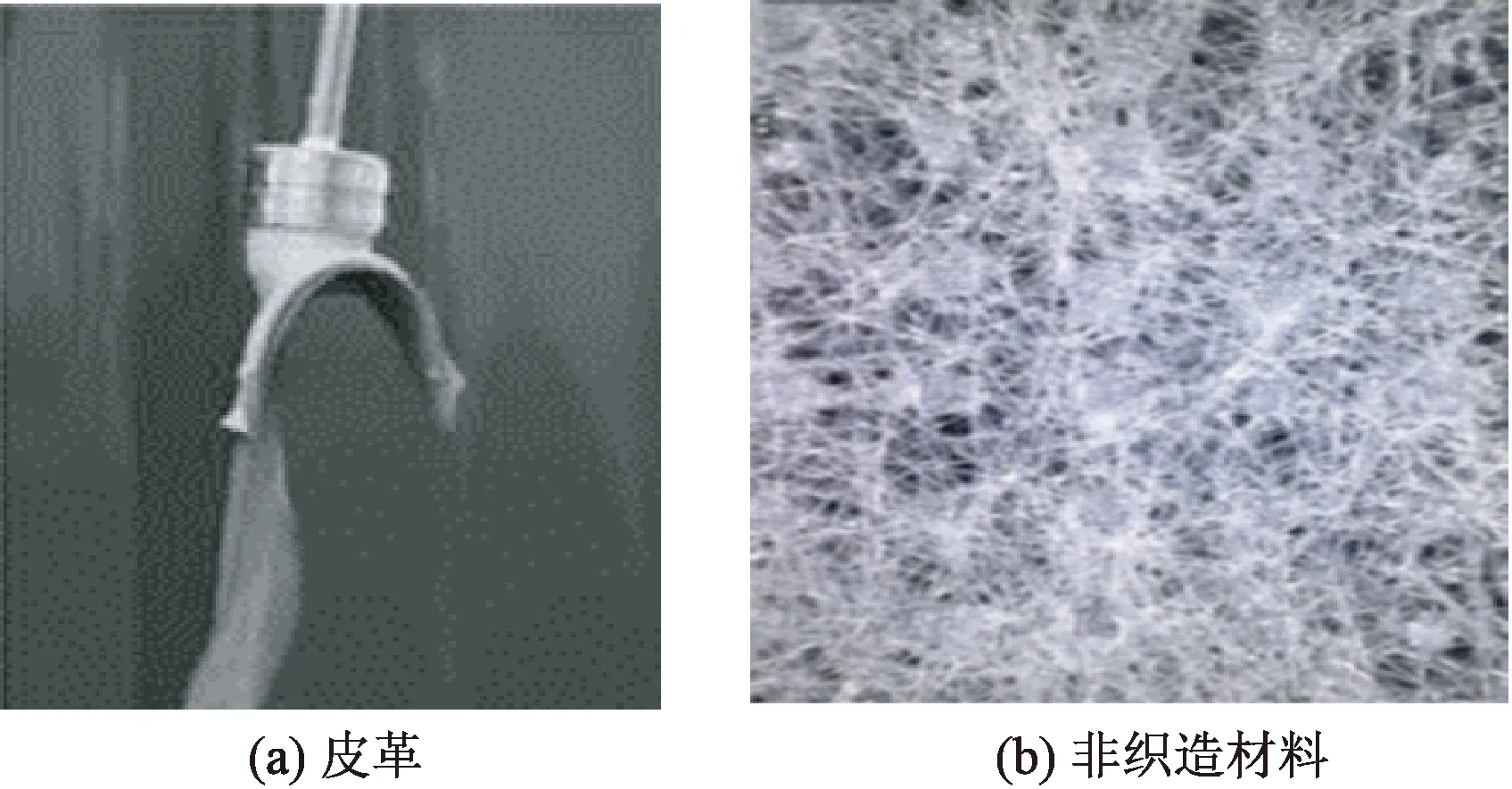
图3 负压吸盘吸附皮革和非织材料实验图
Lien等设计了一种Coanda末端喷射器,是集真空发生和吸取为一体的真空吸盘。该装置[23]如图4所示。图中2为次级气流,初级高速气流经过通道1汇聚在喷嘴壁上,并沿着扩散器3的内壁继续流动,从而带动喷嘴外部区域的次级气流进入喷射器。经过对Coanda喷射器的流量分析,可得出次级气流与初级气流的比率约为10,这就使得该喷射器适合多孔材料抓取。Lien等对具有多孔结构的服装品进行了抓取实验,图5为该吸盘吸取服装布料的实验图。Fleischer等在Coanda喷射器研究的基础上,把Coanda喷射器与压力控制系统相结合,设计出了一种可实时监测吸盘压力的吸取装置,实验结果证明该装置可稳定吸附CFRP[24]。
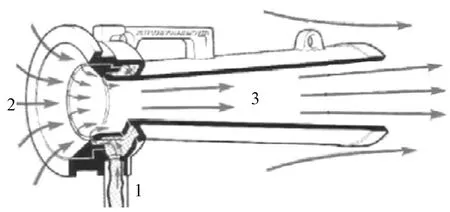
1—初级气流通道; 2—次级气流; 3—气流扩散管道。
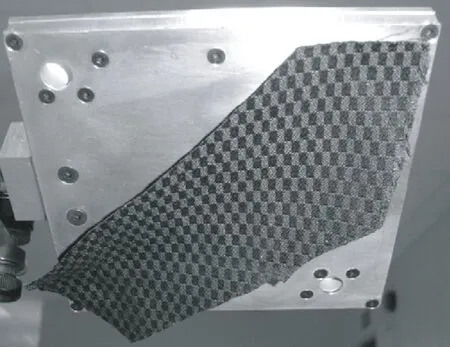
图5 Coanda喷射器吸取布料实验图
负压吸附在抓取无空隙材料面料的时候性能优异,在抓取少孔和多孔面料时性能逐渐降低,需要提供的负压值也逐渐增加,导致能量消耗很大,若负压值达不到指定要求,抓取的稳定性也会降低;但负压吸附对工作环境的要求较低,可满足大多数车间的生产需求。在面料转移过程中,因吸附力不稳定也会导致面料在工作台上的定位精度降低。
1.3 静电吸附抓取转移
静电吸附是指对电极板加高强电压,使得电极板上产生大量的自由电荷,自由电荷会产生强电场使电极板和面料极化,再利用异性电荷相互吸引的原理,达到电极板吸附面料的目的。静电吸附的原理是由电极板与极性面料之间构成的电容系统实现的[25]。电极板上的正负电极交错排布,2个极板之间为均匀电场[26-27],附近为边缘电场,面料与静电吸附单元接触面形成强烈的电位差,面料表面产生极化现象,也可称为面料与静电吸附单元产生电位差,相互之间产生静电吸附力,从而达到吸附面料的效果[28],静电吸附原理如图6所示。
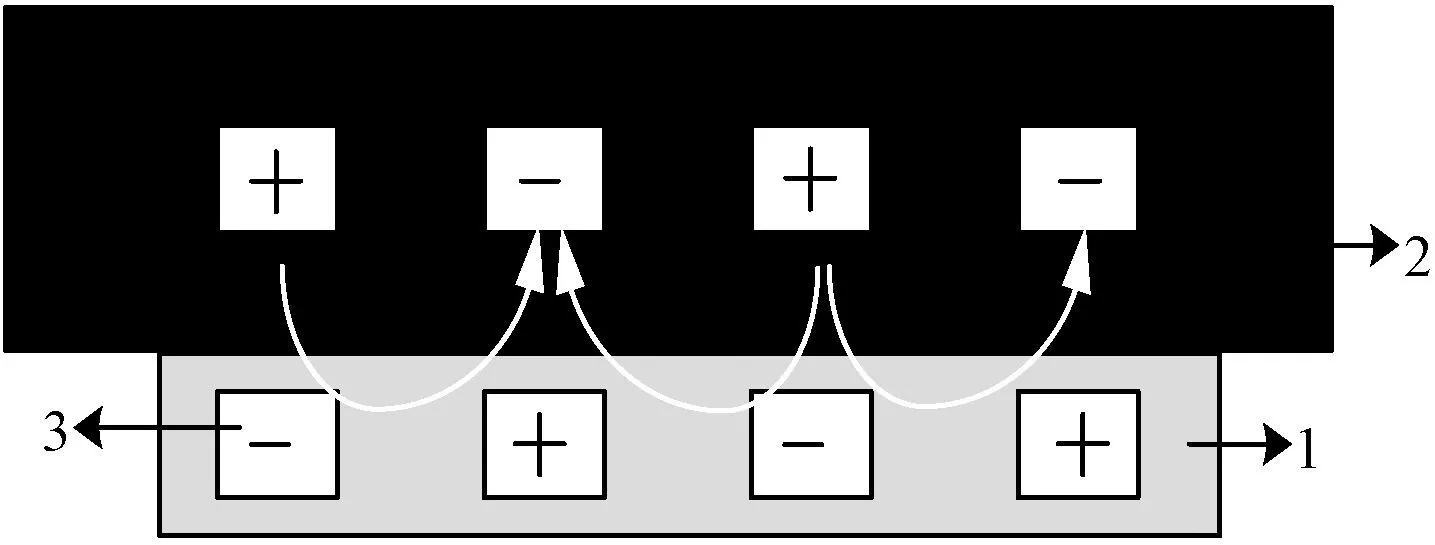
1—极化的面料;2—绝缘层;3—电极组。
Schaler等[29]设计了一款基于静电吸附的柔性静电抓手,能够抓取柔性物体(MLI),应用于国际空间站的维修。国内一些公司生产的静电吸盘[30-32],可安装在机械手上来抓取多孔、柔软的布料,且吸附力比较稳定,不会对布料产生损坏,也可配合视觉设备和机械手一起使用,从而实现智能化抓取。静电吸盘实物图如图7所示。ZHANG[33]也介绍了一种用于航空航天应用中物料搬运任务的大型抓取装置,可有效抓取大型织物。

图7 静电吸盘吸附面料实物图
在服装行业中,应用静电吸附原理抓取转移面料的研究较少,其主要原因是静电吸附对生产车间的要求较高。由于静电可吸附空气中的尘埃,使吸附能力和定位精度降低,所以需要满足无尘的环境[34]。静电吸盘吸附力的大小取决于电极之间的距离,距离越小,吸附力越大。静电吸盘的电压很高,当电极很近时,容易产生击穿现象。静电吸盘不仅生产工艺复杂、制造成本很高,而且很难实现较重物体的抓取。
1.4 非接触式吸盘抓取转移
非接触式吸盘主要分为伯努利悬浮法和漩涡悬浮法[35-37]。伯努利悬浮法的工作原理是在喷嘴与面料之间产生高速流体流动[38],由于气流高速流动,面料和吸盘表面间的压强变小,面料上表面产生真空区且小于面料下表面的大气压强,从而使得面料被吸盘吸附提升。伯努利悬浮法由伯努利原理可知,在供应管道处的能量消耗很大[39],工作原理图如图8所示。旋涡悬浮法的工作原理是压缩空气喷出后切向进入旋流室[40],离心力使吸盘内部和外部大气压产生压力差,工作原理如图9所示,旋涡悬浮法空气消耗量相比伯努利悬浮法要小很多[41-42]。
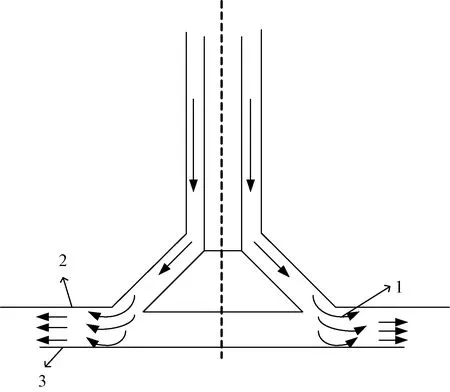
1—气流方向; 2—吸盘上表面; 3—吸盘下表面。
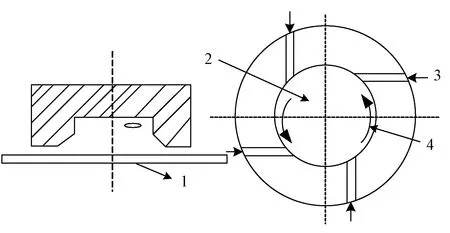
1—面料;2—真空腔;3—气流入口;4—旋流方向。
服装面料抓取转移方式在工业应用中存在着定位精度不够准确和各抓取转移方式容易对面料表面产生划痕缺陷的弊端。机械手在抓取的时候容易对面料表面产生抓痕。面料由于具有透气性,因此负压吸盘在吸附面料的时候也存在一定的局限性。Dini等人制造了可吸附皮革的非接触吸盘[43],该实验结果表明,非接触吸盘可抓取重量通常在5~50 N之间的大型皮革,且抓取完后皮革表面不会产生任何的痕迹,该装置的实物如图10所示。Ozcelik等[44]设计了一种可抓取转移服装面料的非接触吸盘,为了消除面料在转移过程中产生相对滑动问题,在吸盘座上安装了2个平行于吸盘嘴轴线的垂直止动件,每个止动件的长度可根据材料的物理结构和表面光滑度进行单独调整。

图10 非接触吸盘实物图
非接触吸盘抓取转移方式几乎适合任何材质面料的抓取,且不会对面料产生表面缺陷,更为适合服装面料的抓取转移。对工作环境的要求也比较低,可以在普通车间进行工作生产。非接触吸盘的制造成本跟静电吸附和机械手相比大幅降低,但能量损耗较大,定位精度也有待提高。
2 服装面料抓取方法的讨论分析
本文介绍了布料抓取的4种抓取转移方式,并对4种抓取方式的性能进行比较,如图11所示。

图11 面料抓取转移方法的性能对比图
机械手适合表面粗糙、厚度在3 mm以上的面料抓取,但制造成本相对较高、定位精度较差,容易使面料产生划痕,对面料产生不可修复的缺陷。如果未来机械手抓与带有壁虎胶黏剂的软体手爪结合[45],面料的精准定位和划痕缺陷问题或许可有效解决。负压吸盘适合无纺布等透气性能差的面料抓取,制造成本低,对工作环境的适应性较好,但抓取面料的吸附力不稳定,定位精度较差,对于孔隙较大的面料无法完成抓取工作[46],且能量消耗大、噪声高。未来负压吸附可在产品结构方面进一步改进,以减少噪声、降低消耗、提高定位精度和对高弹、大孔径面料的吸附能力。静电吸附适合极性面料的抓取,运行能耗很小,但静电吸附容易将布料击穿[47],制造成本高昂,且最好在无尘环境中运行,定位精度比负压吸附和机械手高。非接触吸盘和前3种抓取机构综合相比,具有适用的面料更广、工作环境要求低和制造成本低的独特应用价值,而且不会对布料产生划痕,比较适合面料的抓取;但能量损耗较大,定位精度较低。如果非接触式吸盘克服能量耗损和定位精度等问题,未来在面料抓取方面将有很大应用前景。4种自动抓取转移方式的定位精度均有待提高。我们需要分析各种抓取方式的优缺点,按照学科交叉、优势互补的原则开发实用性更高、能耗更低、可靠性更强和定位精度更高的面料抓取转移装置,满足国家工业化发展对面料抓取转移的要求。
3 结束语
在21世纪国家大力发展智能制造的时代,服装面料的抓取转移方式必将向自动化、节能化、高效化、高定位精度方向发展,传统的人工抓取转移方式必将被自动化抓取转移方式取代。本文所述机械手对面料产生表面划痕缺陷,负压吸附无法吸附高透气性面料,静电吸附容易击穿面料等,均存在一定不可弥补的缺陷。未来在布料抓取方式上,自动化非接触式吸盘以低成本、高效率且无损害等独特的优点可能成为科研人员研究的重点方向。非接触吸盘的雏形已经形成,接下来科研人员需要继续提高吸盘的吸取效率和定位精度,降低能量损耗,优化非接触吸盘的内部结构[48],促进与机械手臂的高效结合,对提高非接触式吸盘在服装面料抓取转移方面的研究具有重要意义。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
军事文摘(2023年4期)2023-04-05 13:57:35
山东纺织经济(2020年9期)2020-12-25 03:00:00
流行色(2019年7期)2019-09-27 09:33:20
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
质量技术监督研究(2017年4期)2017-05-07 13:32:08
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
河南科技(2014年11期)2014-02-27 14:17:10