
编队雷达交叉定位精度分析∗
2021-04-06 07:13
舰船电子工程 2021年3期
(92941部队41分队 葫芦岛 125001)
1 引言
舰艇编队作为未来海军主要的基本作战单元,其编队内各舰艇和武器系统协同作战是未来编队防空的一种主要模式。雷达作为编队协同防空信息系统主要信息源,面临越来越多、越来越严峻的有源干扰和无源干扰。交叉定位是编队协同防空雷达抗干扰的重要手段,其利用目标辐射、转发和反射的电磁信号对目标进行探测、定位、跟踪及识别,具有电磁隐蔽、不易暴露的特点,且不会招来诸如反辐射导弹这样的进攻性武器的攻击。本文主要对编队协同防空雷达交叉定位精度开展分析和研究,从交叉定位的体制出发,分析编队舰艇布局、定位算法和雷达测量精度对定位精度的影响,利用交叉定位精度的几何稀释度实现对舰艇编队雷达数据融合的合理赋权。
2 舰艇编队面临的主要威胁及雷达抗干扰措施
编队协同防空面临的主要威胁包括亚音速反舰导弹、超音速反舰导弹和高超音速反舰导弹、反辐射导弹、制导炸弹、战斗机、无人机、直升机等。当今空袭作战强调战术行动的大规模性和隐蔽性。行动的大规模性是指大量的飞机、精确制导武器、巡航导弹、反舰导弹、无人机等参加,形成饱和攻击态势。行动的隐蔽性是指依靠超低空接近需要打击的目标、空袭武器的低可探测性以及广泛采用各种干扰。针对类似威胁,舰艇编队的各类探测传感器,尤其是雷达面临着空前的压力[1~4]。编队中雷达一般包括预警机载雷达、其他机载雷达和多型号多类型舰载雷达,同一舰艇平台上也往往装着多型号雷达,编队雷达交叉定位示意图见图1。
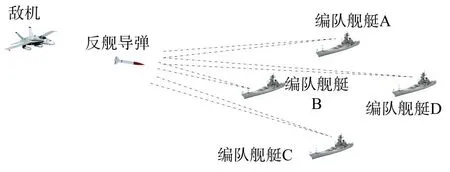
图1 编队雷达交叉定位示意图
雷达抗干扰性能是衡量雷达系统在复杂电磁环境下生存能力的一项重要指标,在攻防双方的电子对抗作战中,雷达作为防空导弹武器系统的“眼睛”,干扰了雷达,也就瓦解了整个舰艇编队的生存能力和作战能力。现有雷达多采取威力增大,带宽增大,波形种类增加[5],采用数字波束形成等方式对干扰源进行旁瓣对消,从干扰感知和识别到不同干扰的综合自动对抗均有详细设计。
其中,对抗远距离支援式干扰等副瓣干扰,雷达采用低副瓣、副瓣匿影和副瓣对消等各种抗干扰措施[6],但对自卫式干扰和伴随式干扰等主瓣干扰或近主瓣干扰,由于载机平台相对雷达较远,平台回波功率较小,干扰机产生噪声功率能够覆盖目标回波,雷达很难从信号中检测出目标。在此情况下,编队雷达可以转为无源跟踪模式,测量目标的角度信息,利用多舰雷达交叉定位实现对目标的搜索跟踪。
3 雷达交叉定位原理及精度分析
雷达交叉定位具有两类工作方式,第一类工作方式是利用目标上辐射源发射的电磁信号,通过多部雷达测量完成目标定位。这类定位系统的测量参数可以是到达时间、到达方位和到达频率及其差值。定位系统利用这些测量值通过一定的定位算法来确定目标位置;第二类工作方式是主节点雷达对目标实现有源探测,干扰机收到本平台的辐射信号进行复制转发,主节点雷达可采用副瓣匿影技术将从副瓣进入的干扰信号进行剔除处理,而在跟踪主瓣内形成一连串的距离欺骗假目标。与此同时,配合节点雷达采用与主节点雷达同样的工作频点,雷达采用无源测角工作模式,对干扰信号进行测向处理,并将测向信息实时传输到主节点雷达进行融合处理。
这两类工作方式,雷达接收的信号来源不同,但其定位原理本质上是相同的,即利用舰艇雷达与目标之间的几何关系获得目标位置,为了简单,以双舰雷达测角交叉定位为例,x,y,z对应于东北天坐标系,示意图见图2。

图2 双舰雷达测角交叉定位示意图
图中,有两部舰艇雷达节点O(0,0,0)、B(xs,ys,zs)和一个目标节点T(x,y,z),由于两部舰艇相距较远,考虑到地球曲率的影响,雷达节点B不在XOY平面上,舰艇雷达节点O测得的目标的方向矢量为方位角β1、俯仰角ε1,舰载雷达节点B测得的目标的方向矢量为方位角β1、俯仰角ε2。
由图示关系可得到:
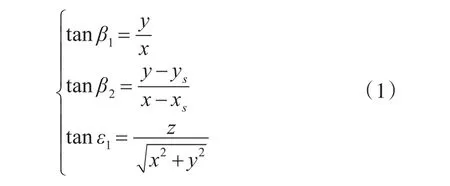
解以上方程组可得到目标空间位置(x,y,z)。
在实际测量中,由于雷达测角误差的存在,其被动交叉定位后的距离也存在误差,误差会随着定位双舰与目标的相对位置、高度、距离的不同而不同,这种定位误差的分布可以用定位精度几何稀释度(Geometrical Dilution of Precision,GDOP)[7]来描述。
4 雷达交叉定位精度几何稀释度
GDOP通常用来描述组网测量中定位误差的分布情况[8~12],常描绘成等高线图的形式,并在其上标出等高线数值,其计算公式如下:
对式(2)求全微分,可得:
将式(8)代入式(3)可得双舰雷达测角交叉定位精度几何稀释度。
5 定位精度仿真
5.1 编队双舰雷达交叉定位GDOP图
以4艘舰艇组成的菱形编队为例,其中AC=AD=BC=BD=CD=a,AB=b,示意图见图3。
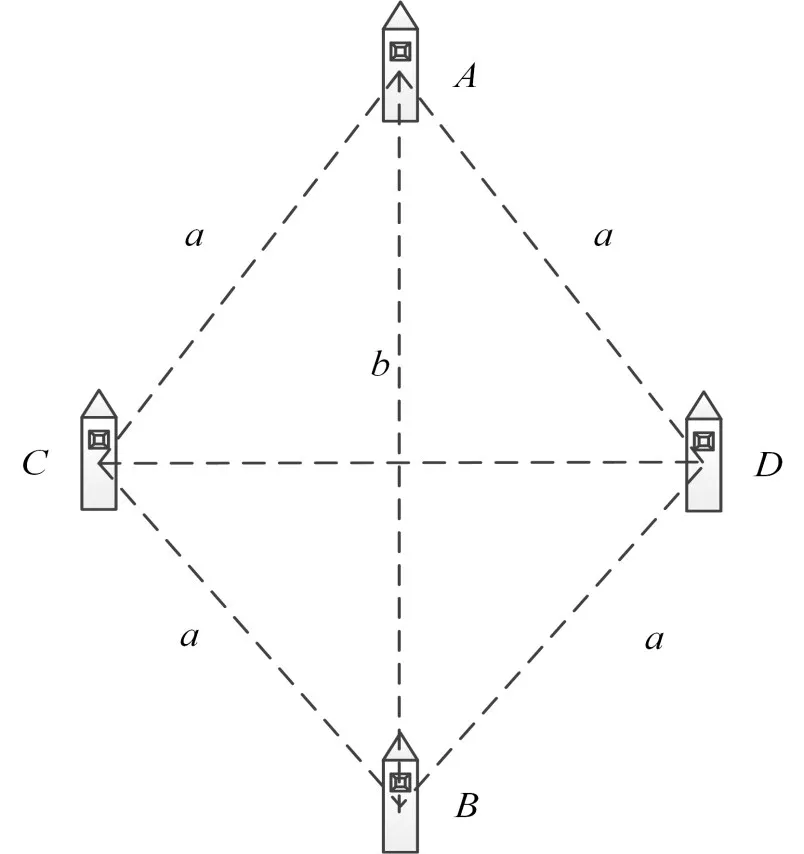
图3 编队雷达测角交叉定位示意图
5.2 测向精度和基线长度对定位精度的影响
1)测向精度对定位精度的影响
图4、图5绘制了测向误差分别为σθ=0.1°、σθ=0.5°和σθ=1°时的定位精度分布图,从图中可知,在测向误差变大时,定位精度迅速变差,因此,在编队中,应该优先选取测向误差小的雷达数据进行融合或者提高测向误差小的雷达数据融合时的权重系数。

图4 双舰距离20km时不同测向精度的GDOP图
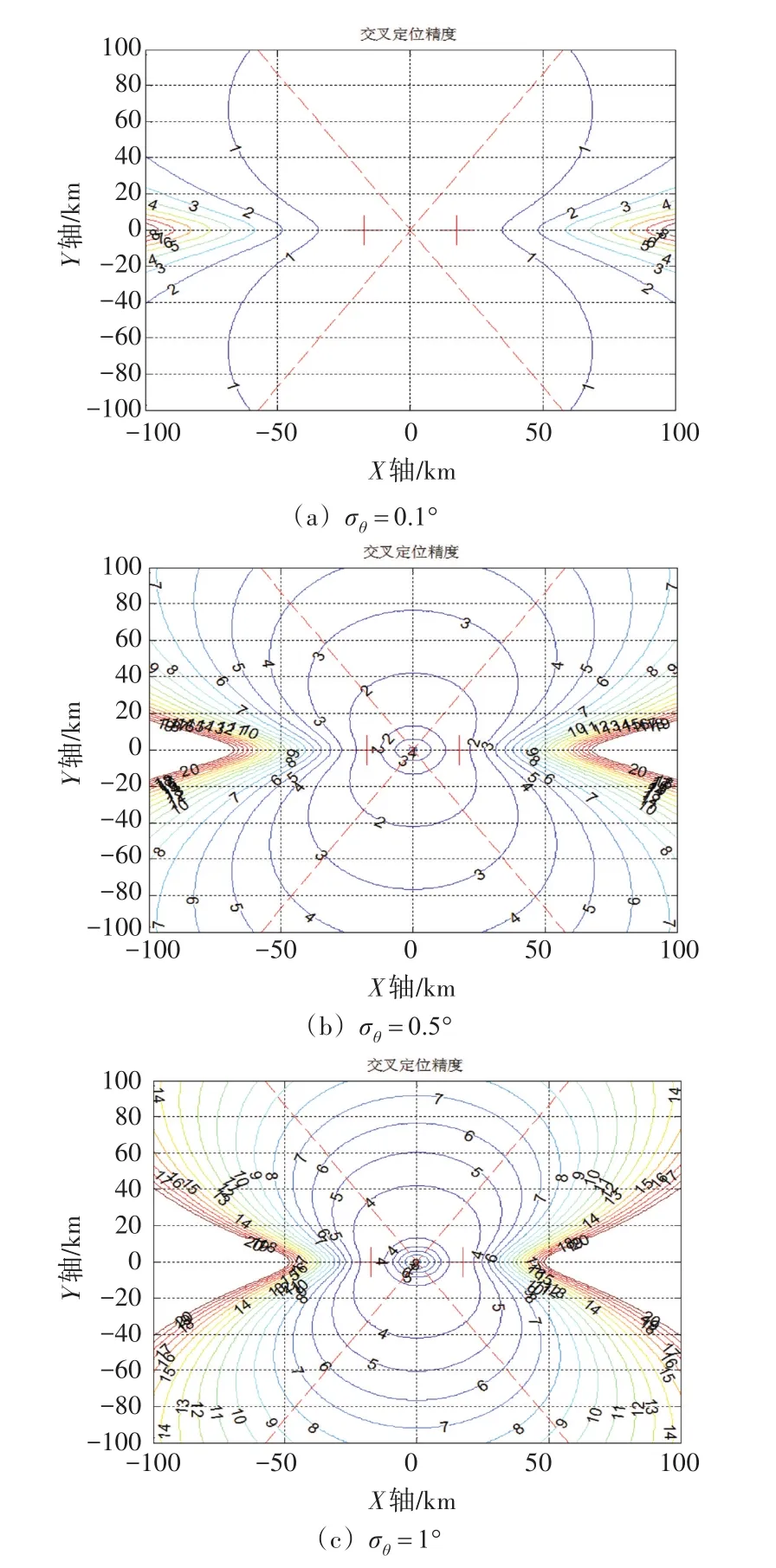
图5 双舰距离34.64km时不同测向精度的GDOP图
2)基线长度对定位精度的影响
对比图4、图5相同测向误差,不同基线长度的定位精度分布图可知,在基线长度变大时,定位精度变好,因此,在编队中,应该优先选取基线长度大的双舰雷达数据进行融合或者提高基线长度大的双舰雷达数据融合时的权重系数。
另外,从图4、图5中可以看出双舰交叉定位基线延长线附近区域的测量精度很差,即存在定位盲区。
5.3 不同威胁方向的定位精度排序
设编队航行方向为正北,取正北方向为0°,威胁方向即目标来袭方向,为目标和舰艇连线与正北方向的夹角,对比图4、图5可以得出,当主要威胁方向为0°时,CD双舰定位精度最优,AC、AD、BC、BD次之,AB最差;当主要威胁方向为30°时,AD、BC、CD双舰定位精度最优,AB次之,AC、BD最差;当主要威胁方向为90°时,AB双舰定位精度最优,AC、AD、BC、BD次之,CD最差。
相应的目标融合处理算法权重系数亦应按定位精度优劣排序。如表1所示。
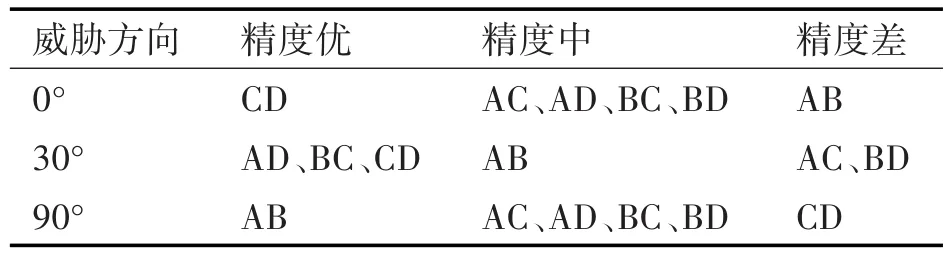
表1 不同威胁方向定位精度顺序表
6 结语
运用几何稀释度对编队雷达交叉定位精度进行分析,绘制舰艇编队中不同舰载雷达组合下的GDOP图,为编队协同防空目标融合处理提供了科学客观的依据,有利于编队获取更加完整的目标信息,提高编队雷达抗干扰能力。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
凤凰动漫(军事大王)(2022年3期)2022-06-17
军事文摘(2021年21期)2021-11-14
初中生世界·八年级(2019年6期)2019-08-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
兵器知识(2017年10期)2017-10-19
小学生导刊(低年级)(2016年9期)2016-10-13
小学生导刊(低年级)(2016年6期)2016-07-02
