基于车体横移振动的高速列车虚拟复合阻尼天棚控制算法研究
2021-04-02 03:33:10陈仁涛陈春俊
计算机测量与控制 2021年3期
陈仁涛,陈春俊,2
(1.西南交通大学 机械工程学院,成都 610031;2.轨道交通运维技术与装备四川省重点实验室,成都 610031)
0 引言
列车的高速化和轻量化使得列车轮轨耦合,流固耦合作用加大,车体结构刚度降低,弹性变形增大,使得车体横向振动更加剧烈,并引发车体高频振动,致使车体横向运行平稳性变差[1-3]。现有研究表明半主动悬挂策略是抑制车体横向振动,改善车体横向运行平稳性的有效方法[4-9]。在现有高速列车半主动控制策略中,天棚阻尼控制算法以其结构原理简单、控制效果好等优点,受到研究者的重点关注。传统天棚阻尼控制是根据车体横向振动速度大小来控制车体横向振动,文献[10]中指出传统天棚阻尼控制能够有效抑制车体的横向振动速度,但是对车体横向振动加速度的抑制效果不足。因此,要想改善车体横向平稳性,提高半主动控制性能,需要对传统天棚阻尼策略进行改进。
文献[11]中指出高速列车车体合成横向振动由横移振动、侧滚振动和摇头振动三自由度合成,在一段时间内的不同时刻,三个振动分量之间的振动强弱和振动方向会展现出阶段性的一致性或矛盾性,即在对车体横向振动进行半主动控制时,当车体横移振动得到抑制的同时,可能会加大车体的侧滚振动和摇头振动,从而使得半主动控制的性能降低。因此在对半主动悬挂控制策略进行改进时,还应充分考虑车体横向振动特性对半主动控制效果的影响。
基于此,本文通过建立某型高速列车多刚体动力学模型,对车体横向振动特性进行了研究,得出造成车体横向合成振动加剧和平稳性恶化的主要原因为车体横移振动加剧。通过分析在传统天棚阻尼控制算法下分别以车体合成横向振动和以横移振动为反馈对车体横向振动的控制效果,得出采用以车体横移振动为反馈的传统天棚阻尼控制算法对车体横向振动的抑制效果更佳。在此基础上,提出一种以车体横移振动为反馈的虚拟复合阻尼天棚控制策略,并建立联合仿真分析系统,对采用传统天棚阻尼控制方法和采用虚拟复合阻尼天棚控制方法下的车体横向振动控制效果进行研究,验证本文提出的半主动控制策略的可行性和有效性。
1 高速列车动力学模型建立与横向平稳性评价
1.1 高速列车多刚体动力学模型建立
运用Simpack建立某型高速列车动力学模型时,需将抗蛇形减振器、横向止挡和轮轨接触几何关系等考虑为非线性关系。采用Kalker非线性蠕滑理论计算蠕滑力,车轮踏面和钢轨分别选用选用LMA型车轮踏面和60 kg标准型钢轨,轨道不平顺由德国低干扰轨道谱生成。如图1所示为利用Simpack建立的某型高速列车单节车辆多刚体动力学模型,除弹性、阻尼元件外的各个部件均视为刚体,对于车体、构架和轮对均考虑X、Y、Z3个方向的平移和转动自由度。单节列车的动力学模型共42个自由度,其主要参数如表1所示。得到车辆的位移向量为:
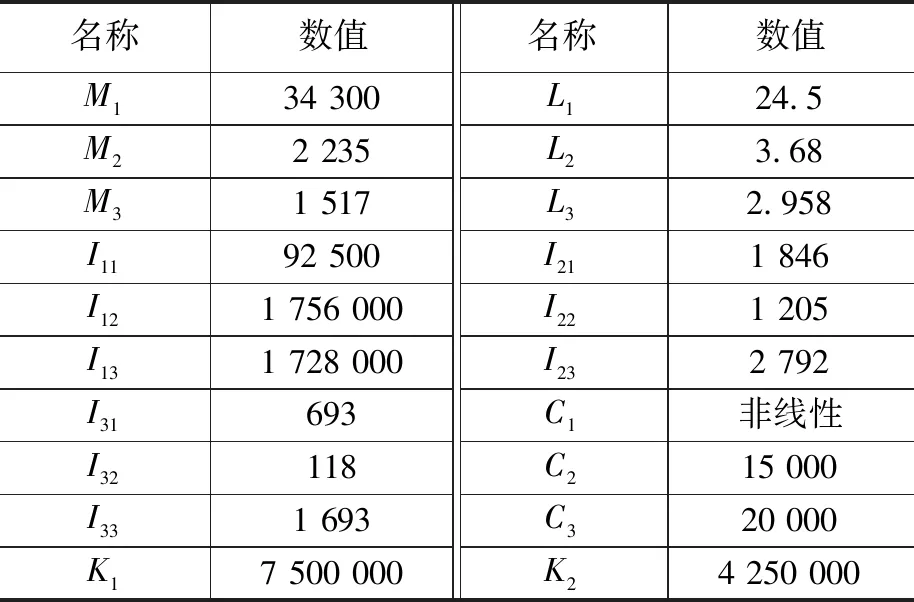
表1 某型高速列车主要参数列表
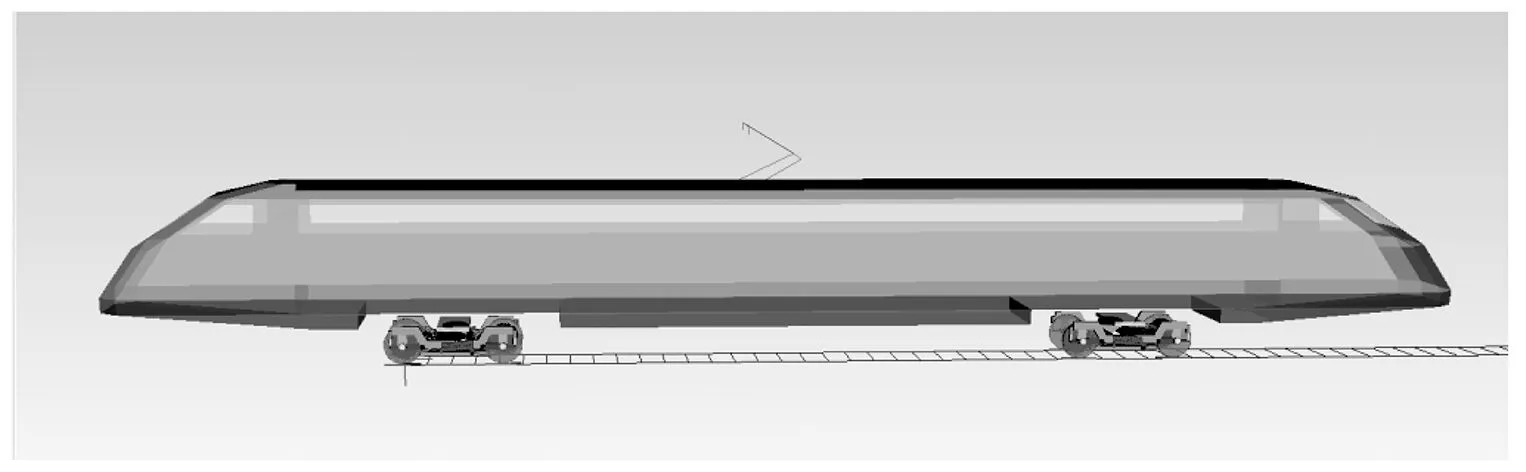
图1 单节车辆多刚体动力学模型
(1)

根据Lagrange原理车体系统动力学方程可表示为:
(2)
式中,Mv、Cv和Kv分别为42×42的质量矩阵、阻尼矩阵和刚度矩阵。Fev为由轨道不平顺引起的作用在轮对上的等效力。
表中l1、l2、l3分别为车体长度、高度和宽度(单位:m);M1、M2、M3分别为车体、构架和轮对质量(单位:kg);I11、I12和I13分别为车体侧滚、点头和侧摇转动惯量(单位:kg·m2);I21、I22和I23分别为构架侧滚、点头和侧摇转动惯量(单位:kg·m2);I31、I32和I33分别为轮对侧滚、点头和侧摇转动惯量(单位:kg·m2);C1、C2和C3分别为抗蛇形减振器阻尼、二系垂向减振器阻尼和二系横向减振器阻尼(单位:N·s·m-1);K1和K2分别为二系垂向减振器刚度和二系横向减振器刚度(单位:N·m-1)。
1.2 横向平稳性评价指标
平稳性的好坏关系着高速列车的运行品质,决定了乘坐人员的舒适性。国内外常用加速度均方根值(RMS值)、UIC513舒适度标准和Sperling平稳性指标等指标对列车平稳性进行评价。本文选择Sperling平稳性值作为列车横向平稳性评价指标,其计算公式如下所示:
(3)
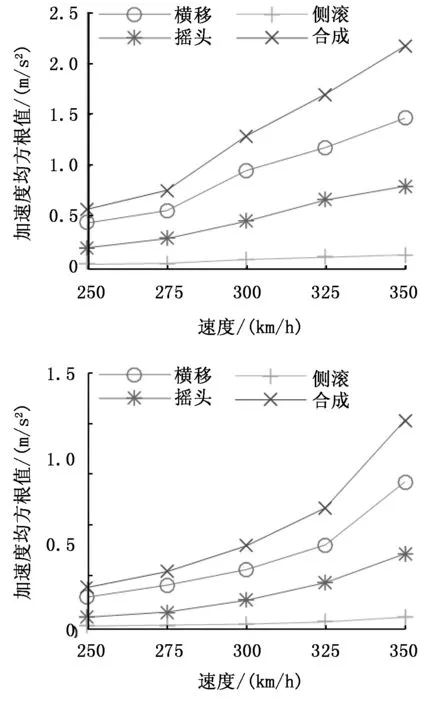
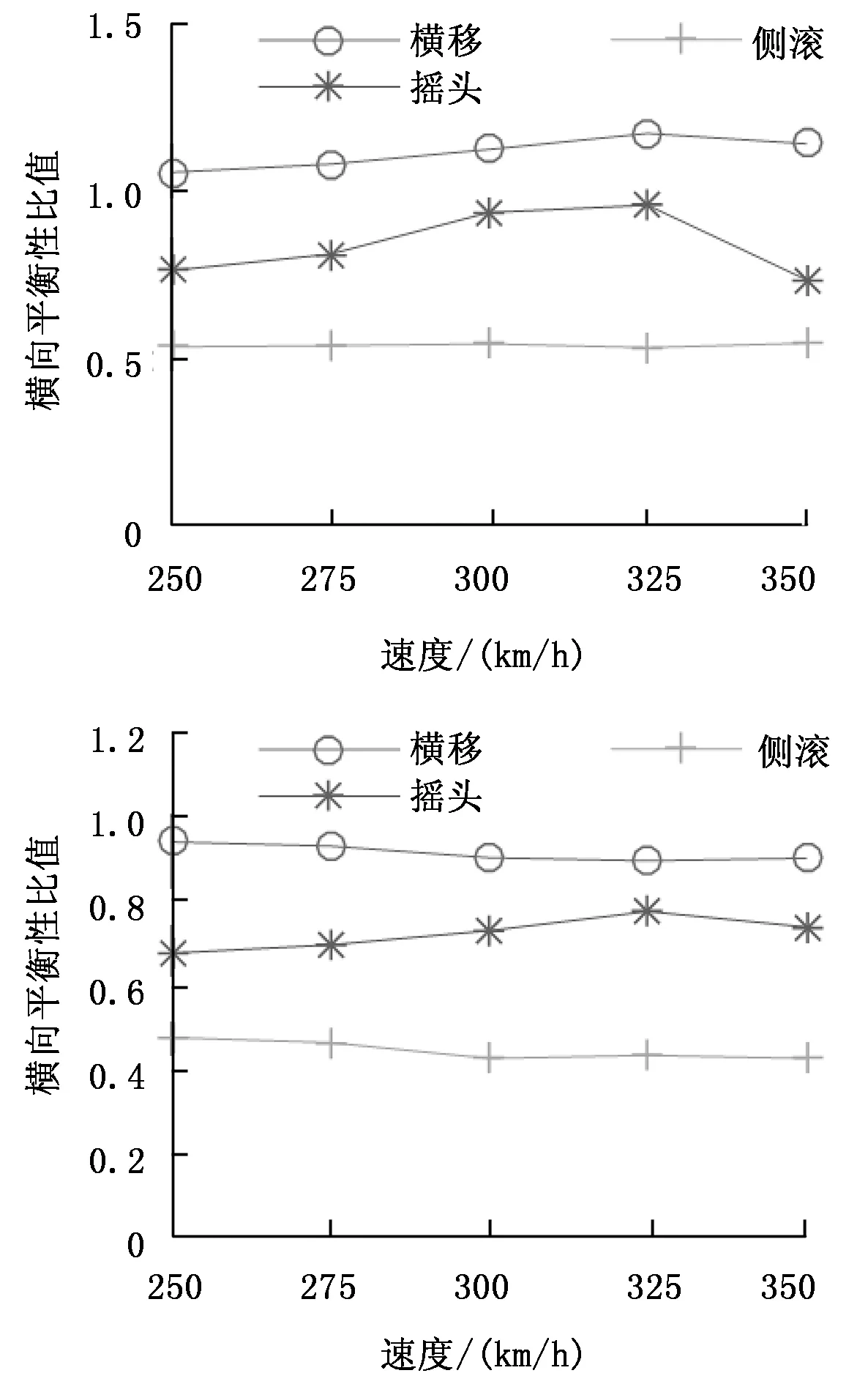
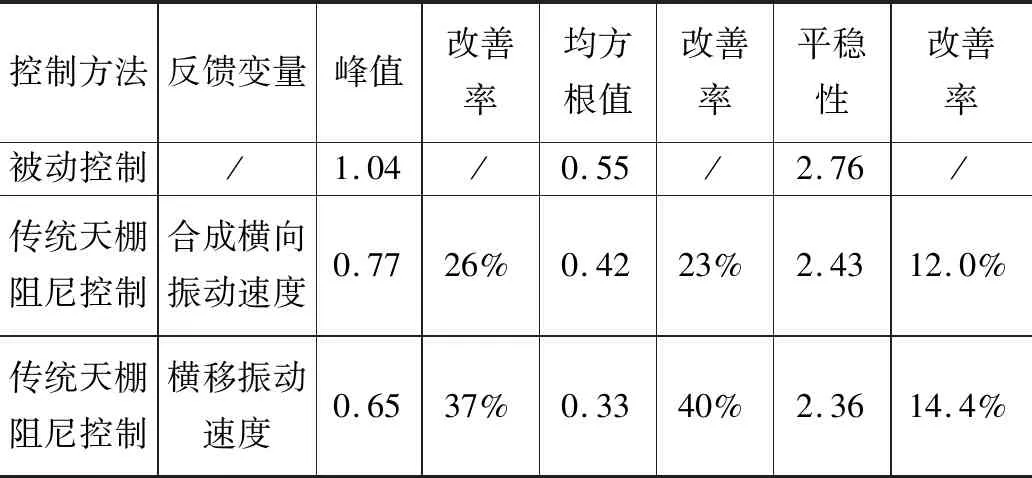
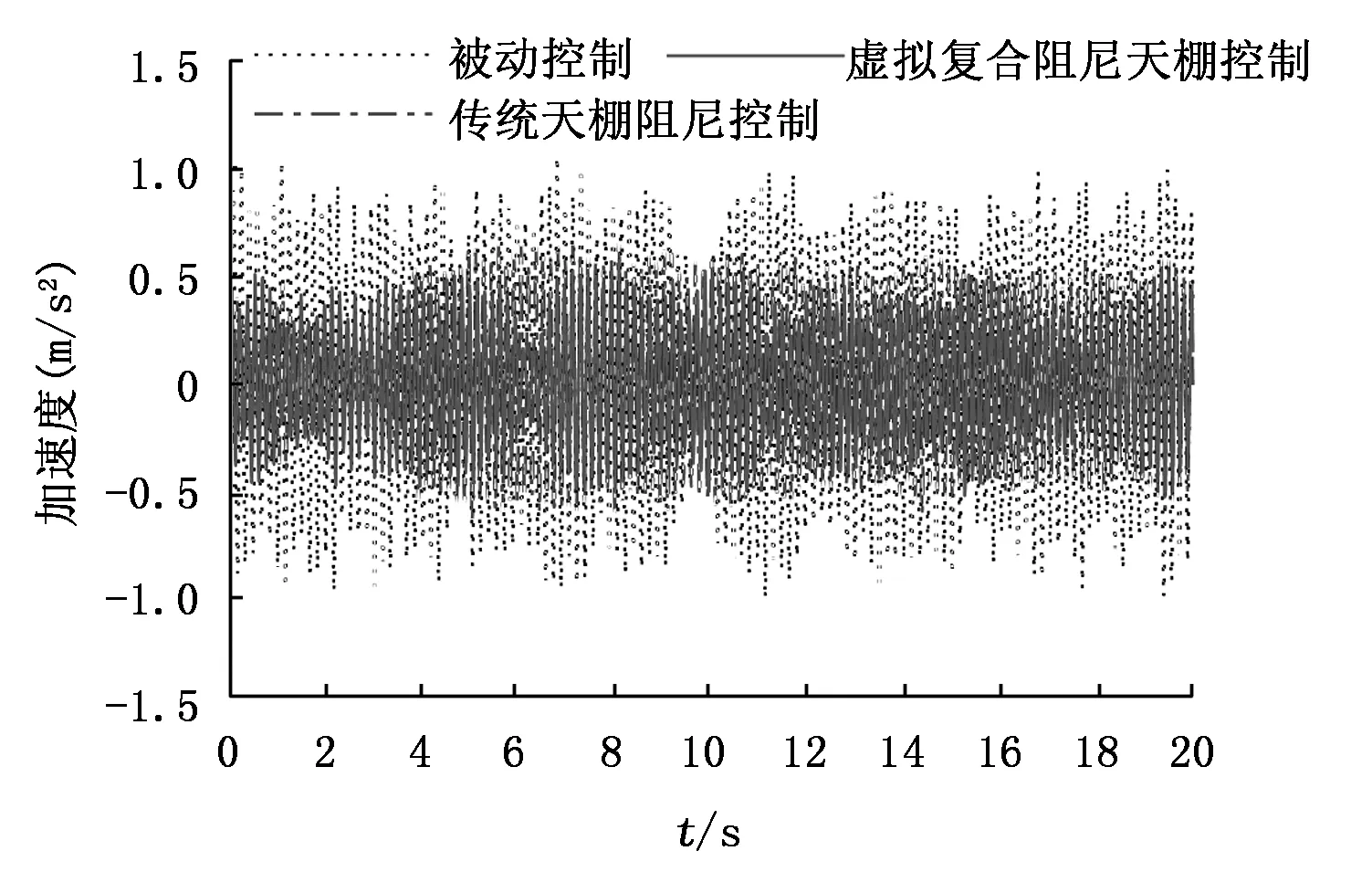
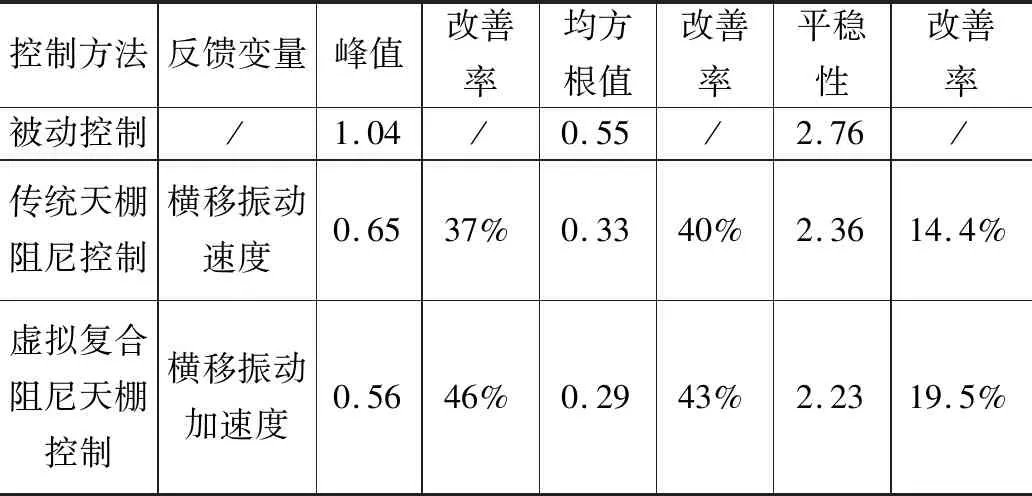
式中,W为平稳性指标;a为车体横向振动加速度;f为振动频率;F(f)为频率修正系数;GB/T5599-1985《铁道车辆动力学性能评定和试验鉴定规范》中规定:当W<2.5时,评价等级为优,2.5 高速列车车体合成横向振动由车体的横移振动、侧滚振动和摇头振动三自由度合成,是影响乘客乘坐舒适性的主要因素。如图2所示为车体横向振动加速度传感器安装位置,其中车体前端测量点1和车体后端测量点2为GB/T5599-1985《铁道车辆动力学性能评定和试验鉴定规范》标准中规定车体横向振动加速度的测量点。 图2 车体横向振动加速度传感器安装位置 利用多体动力学仿真分析软件Simpack仿真分析时,测量点1和测量点2的横移振动加速度分量、侧滚振动加速度横向分量和摇头振动加速度横向分量可由加速度传感器1和加速度传感器2测量得到。测量点1和测量点2横向振动分量与合成横向振动之间的关系如式(4)所示: (4) 式中,a1(t)和a2(t)分别为测量点1和测量点2的车体合成横向振动加速度,ay1(t)和ay2(t)为测量点1和测量点2的横移振动加速度分量,aφ1(t)和aφ2(t)为测量点1和测量点2的侧滚振动加速度横向分量,aφ1(t)和aφ2(t)为摇头振动加速度横向分量。 车体横移、侧滚和摇头振动与合成横向振动之间的一致度和矛盾度大小,能够反映出在合成车体横向振动时,是抵消还是加剧作用。为了更好地抑制车体横向振动,改善列车车体横向平稳性,提高横向平稳性改善率,有必要对车体横向内部振动与合成横向振动的一致度和矛盾度进行分析,找出影响车体横向平稳性的主要因素,从而针对性地对其进行控制,以提高半主动控制的性能。文献[12]中详细介绍了车体横向内部振动分量与合成横向振动之间的矛盾度求解方法,其计算公式如式(5)所示: (5) 式中,n=(1,2)分别表示测量点1和测量点2。ds(an,ayn)为合成横向振动与横移振动之间的矛盾度。ds(an,aφn)为合成横向振动与侧滚振动横向分量之间的矛盾度。ds(an,aφn)为合成横向振动与摇头振动横向分量之间的矛盾度。 (6) 式中,cs(an,ayn)为合成横向振动与横移振动之间的一致度,cs(an,aφn)为合成横向振动与侧滚振动横向分量之间的一致度,cs(an,aφn)为合成横向振动与摇头振动横向分量之间的一致度。 为了研究造成车体合成横向振动和横向平稳性恶化的主要因素,本文对不同速度下的车体内部横向振动特性进行仿真分析。仿真时采用德国低干扰轨道谱生成的横向和垂向轨道轨道不平顺作为轨道激励,列车运行速度分别设置为250 km/h、275 km/h、300 km/h、325 km/h和350 km/h,仿真时间20 s。如图3和图4所示为不同速度下测量点1和测量点2的横向振动加速度峰值和均方根值,由图3可知,测量点1的横移振动加速度峰值和均方根值不仅大于摇头振动加速度横向分量和侧滚振动加速度横向分量的峰值和均方根值,还大于车体合成横向振动加速度的峰值和均方根值。由图4可知,测量点2的车体横移振动加速度的峰值和均方根值与车体合成横向振动加速度的峰值均方根值最为接近,且都明显大于摇头振动加速度横向分量和侧滚振动加速度横向分量的峰值和均方根值。 图3 测量点1横向振动加速度峰值和均方根值 图4 测量点2横向振动加速度峰值和均方根值 如图5所示为不同速度下测量点1和测量2的横向内部振动加速度与合成横向振动加速度之间的一致度,由图5可知,不管是车体前端测量点1,还是车体后端测量点2的车体横移振动加速度与合成横向振动加速度之间的一致度都最高。可见,车体横移振动加剧是造成车体横向合成振动恶化的主要原因。 图5 车体内部矛盾关系 如图6所示为不同速度下分别以测量点1和测量点2的各横向振动加速度分量与合成横向振动加速度求解得到的横向平稳性值之间的比值。由图6可知,以车体横移振动加速度求解得到的横向平稳性值与以合成横向振动加速度求解得到的横向平稳性值之间的比值明显大于以摇头振动加速度横向分量、侧滚振动加速度横向分量求解得到的横向平稳性与以合成横向振动求解得到的横向平稳性之间的比值。说明造成车体横向平稳性恶化的主要因素也是车体横移振动加剧。 图6 横向振动分量与合成横向振动平稳性比值 由2.3节分析可知,引起车体合成横向振动和横向平稳性恶化的主要原因为车体横移振动加剧,因此为了改善列车横向运行平稳性,提高半主动控制性能,将利用Matlab和Simpack对传统天棚阻尼控制算法下,分别以车体合成横向振动和以横移振动为反馈的控制效果进行联合仿真分析。仿真时以德国低干扰轨道谱生成的横向和垂向轨道不平顺作为轨道激励,仿真运行速度设置为350 km/h,仿真时间20 s。 传统天棚阻尼控制算法是根据车体的合成横向振动速度大小来控制车体横向振动,传统天棚阻尼控制算法的控制规律为[13-14]: (6) 如图7和图8所示分别为不同控制策略下的车体合成横向振动加速度频域图和时域图,由图7可知,车体合成横向振动加速度频率主要集中范围为低频段的2~3 Hz,被动控制下的横向振动加速度幅值最大,以车体合成横向振动为反馈的传统天棚半主动控制下的横向振动加速度幅值次之,以车体横移振动为反馈的传统天棚半主动控制下的横向振动加速度幅值最小。 图7 不同控制方法下车体合成横向振动加速度频域图 由图8可知,采用传统天棚半主动控制后,车体合成横向振动加速度得到了明显抑制。结合表2可知,采用以车体合成横向振动为反馈的传统天棚阻尼控制后,车体横向振动加速度峰值、均方根值和平稳性值分别由被动控制下的1.04 m/s2、0.55 m/s2和2.76分别降低到了0.77 m/s2、0.38 m/s2和2.43,善率分别为26%、23%和12.0%。采用以车体横移振动为反馈的传统天棚阻尼控制后,车体横向振动加速度峰值、均方根值和平稳性值分别由被动控制下的1.04 m/s2、0.55 m/s2和2.76分别降低到了0.65 m/s2、0.33 m/s2和2.36,善率分别为37%、40%和14.4%。 表2 不同控制方法下车体合成横向振动加速度峰值、均方根值和平稳性比较 图8 不同控制方法下车体合成横向振动加速度时域图 可见采用以车体横移振动为反馈的传统天棚阻尼控制算法对车体横向振动的控制效果优于采用以车体合成横向振动为反馈的传统天棚阻尼控制算法。 由2.4节分析可知,相比于采用车体合成横向振动为反馈的传统天棚阻尼控制算法,采用车体横移振动为反馈的传统天棚阻尼控制算法对车体横向振动的控制性能更佳。然而,传统天棚阻尼控制虽然能够有效抑制车体的横向振动速度,但是对车体横向振动加速度的抑制效果不足。基于此,本文提出一种根据车体横移振动加速度大小来控制车体横向振动的虚拟复合阻尼天棚控制算法,其结构原理框图如图9所示。 图9 虚拟复合阻尼天棚控制结构原理框图 设Csy_k1、Csy_c1、Csy_m1分别为天棚弹性阻尼、天棚传统阻尼和天棚惯性阻尼,复合阻尼天棚控制下的阻尼值Cz1=Csy_k1+Csy_c1+Csy_m1,则以车体横移振动为反馈的虚拟复合阻尼天棚控制算法的控制规律为: (7) 其中: (8) (9) (10) 在实际工程应用中,利用如图2所示的加速度传感器1和传感器2能够测得车体合成横向振动加速度,而车体横移振动加速度则可通过车体合成横向振动加速度值间接求得。测量点1和测量点2的横移振动加速度大小相等,方向相同。侧滚振动加速度横向分量大小相等,方向相反。摇头振动加速度大小相等,方向相反。因此将公式(4)进行变换后可得车体横移振动加速度为: (11) 为了验证本文提出的虚拟复合阻尼天棚控制算法的可行性和有效性,将利用Matlab和Simpack对采用虚拟复合阻尼天棚控制算法下的控制效果进行联合仿真分析,仿真时以德国低干扰轨道谱生成的横向和垂向轨道不平顺作为轨道激励,仿真运行速度设置为350 km/h,仿真时间20 s。如图10所示为不同控制方法下车体合成横向振动加速度时域图,由图可知,采用虚拟复合阻尼天棚控制对车体横向振动的抑制效果更佳明显。结合表3可知,采用虚拟复合阻尼天棚控制后,车体合成横向振动加速度峰值、均方根值和平稳性分别由被动控制下的1.04 m/s2、0.55 m/s2和2.76分别降低到了0.56 m/s2、0.29 m/s2和2.23,改善率分别为46%、43%和19.5%。可见采用虚拟复合阻尼天棚控制策略在抑制车体横向振动,改善车体横向平稳性方面优于采用传统天棚阻尼控制。 图10 不同控制方法下车体合成横向振动加速度时域图 表3 不同控制方法下车体合成横向振动加速度峰值、均方根值和平稳性比较 1)通过对不同速度下的车体横向振动特性进行分析,得出车体横移振动加剧是造成车体合成横向振动和横向平稳性恶化的主要原因。 2)通过分析采用以车体合成横向振动和以横移振动为反馈的传统天棚阻尼控制算法对车体横向振动的抑制效果,得出以横移振动为反馈的传统天棚阻尼控制算法对车体横向振动的控制性能更好。 3)通过分析采用传统天棚阻尼控制算法和采用虚拟复合阻尼天棚控制算法对车体横向振动的抑制效果,得出采用虚拟复合阻尼天棚控制算法在抑制车体横向振动,改善车体横向平稳性方面优于采用传统天棚阻尼控制算法。2 车体横向振动特性分析
2.1 车体横向内部振动与合成横向振动关系

2.2 车体横向内部振动与合成横向振动的矛盾度与一致度


2.3 车体横向振动特性仿真分析


2.4 不同反馈变量下的车体横向半主动控制效果分析



3 虚拟复合阻尼天棚控制算法


4 横向振动半主动控制效果分析
5 结束语
猜你喜欢
机械设计与制造(2022年5期)2022-05-19 03:33:54
建筑热能通风空调(2021年11期)2021-12-26 13:16:54
数学物理学报(2021年3期)2021-07-19 06:02:48
工程与建设(2019年5期)2020-01-19 06:22:44
汽车零部件(2019年10期)2019-11-13 05:59:56
厦门理工学院学报(2016年1期)2016-12-01 04:50:40
中国照明(2016年5期)2016-06-15 20:30:13
湘潭大学学报(哲学社会科学版)(2015年5期)2015-11-25 03:00:30
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
空气动力学学报(2013年2期)2013-10-21 11:54:18