BPSO优化算法在含DG配电网中的故障诊断研究
2021-04-02 03:31唐文权
计算机测量与控制 2021年3期
郭 兴,徐 武,唐文权,文 聪
(云南民族大学 电气信息工程学院,昆明 650500)
0 引言
随着城市的扩张,社会各界对电能的需求量快速增加,人类对电能质量的要求也越来越高[1]。如今,随着我国配电网的规模日益扩大,特别是分布式电源的接入,导致配电网系统从以往的单向潮流系统转变为多向潮流系统,配电网络变得不稳定,发生故障的风险也随之提高;其次,分布式电源的接入,也将会导致传统配电网的故障定位方法不再适用[2]。
目前,用于配电网故障定位的方法主要分为两类,第一类是通过重合闸装置和分段器共同作用的检测方法[3]。其原理是当配电网馈线网络发生故障时,首先利用重合器完成跳闸操作,当线路失压后再断开分段开关,该方法的优势在于速度快,精度高,缺点是容错能力差;另外一类是利用FTU终端设备进行故障检测,其原理是利用FTU终端设备进行电流、电压等信息采集并上传至SCADA系统,由SCADA系统结合智能算法完成故障区段定位。该种方法的参数设定较为复杂,难以满足故障定位对实时性的要求[4]。
粒子群算法最开始是对鸟类获取食物的行为进行研究,鸟类找到食物最简单的方法就是寻找距离食物最近的鸟。但是,单纯采用PSO算法进行寻优时,粒子容易陷入局部最优的情况。为此,本文提出了一种改进的二进制粒子群算法(BPSO)运用于配电网的故障检测中,通过大量的仿真实验验证,改进的BPSO算法能够有效改善含DG电源的检测精度。
1 二进制粒子群算法(BPSO)的基本原理
二进制粒子群算法作为计算机领域的一种生物启发式算法[5],二进制粒子群算法中的某一个粒子都代表其中一个解,一个粒子表示一个适应度值;粒子的方向、距离与粒子的速度相关,粒子会根据周围粒子的速度进行相应调整,以便在空间中找寻到最优解[6]。
二进制粒子群算法(BPSO)则是将粒子的最优解以及粒子的任意位置xij记为0或者1,vij代表xij取值为1时的概率[7]。假定搜索空间的维度是W,粒子i的位置标记为xi=(xi1,xi2,…,xiw),速度标记为vi=(vi1,vi2,…,viw)。BPSO算法表示粒子速度的公式可以定义为:
vik + 1=δvijk+c1r1(pbijk-xijk) +c2r2(gbijk-xijk)
(1)

可将位置更新式子定义为:
(2)
其中:rand()表示[0,1]之间的任意值,S(νij)表示sigmoid函数;sigmoid函数可将vij限定在[-4.0,0,4.0]范围内[9]。sigmoid函数可定义为:

(3)
2 二进制粒子群算法在含DG配电网故障检测的模型构建
2.1 含DG配电网的故障编码
在传统配电网中,装设在各联络开关上的FTU设备根据配电网系统正常工作状态下的电流值自动设定监测阈值[10]。当FTU检测到的电流值超过系统预先设定的阈值时,表明该联络开关处有故障电流流过,此时记为“1”;反之,当FTU检测到的电流值小于系统预先设定的阈值时,表明该联络开关处没有故障电流流过,此时记为“0”。采用这样的方式可以形成一系列的离散信息,将这些离散信息传送至SCADA系统,系统利用采集到的故障信息完成故障区段的求解[11]。
当分布式电源接入配电网以后,导致原有配电网的潮流系统从单相潮流系统变为多向潮流系统[12]。为此,需要对FTU终端设备的编码方式重新定义。主电源按照距离其中任意一个FTU设备“最短距离”的原则进行选取,当存在多个电源与FTU终端设备之间的距离相等的情况下,任意选择其中一个电源作为系统的主电源。规定某一主电源单独作用时流过FTU设备的电流标记为正参考方向,当存在故障电流流经FTU设备时,若方向与规定方向相同,标记为“1”;反之,当存在故障电流流经FTU设备时,若方向与规定方向相反,标记为“0”[13]。故障电流I的定义为:

2.2 开关函数的构建
为实现配电网故障区段定位,需要明确联络开关与故障区段的关系,见公式(4)所示:
(4)

在图1中所示的IEEE9节点配电网图中,S1~S9表示开关编号,L1~L9表示每一段馈线的馈线编号。由上述定义规则可知,S1~S5的主电源是系统电源S,且S1~S5上的联络开关上装设的FTU设备的电流正方向为图中实线箭头方向所指;S6~S9的主电源是分布式电源DG,且S6~S9上联络开关上装设的FTU设备的电流正方向为图中虚线箭头方向所指。当线路L4发生故障时,SCADA接收到的编码信息为[1,1,1,1,-1,1,1,1,1]。为避免故障信息传送过程中信息丢失,导致故障诊断算法出现误判,可将丢失的故障信息数据全部设定为“1”。

图1 IEEE9配电网图
2.3 评价函数的构建
针对辐射性配电网可构建如式5所示的评价函数:
(5)

当DG电源接入到配电网中,造成配电网中原有的单相潮流系统变为多向潮流系统,如果继续使用-1,1两种状态对故障信息进行描述,可能导致SCADA系统无法进行判断。为此,提出一种以1,-1,0三种方式进行故障电流信息编码。为保证评价函数能够快速适应新的编码方式,本文对评价函数中涉及到的联络开关期望函数进行改进处理,见公式(6)所示:
I*(Sc)=(0-g*(Sc))+S*(Sc)
(6)
式中,S*(Sc)表示在联络开关Sc处装设的FTU设备检测到的故障电流信息为1时,对所有联络开关上安装的FTU设备可以检测到故障信息为1的馈线区段进行“或逻辑”运算;g*(Sc)表示在联络开关Sc处装设的FTU设备检测到的故障电流信息为-1时,对所有联络开关上安装的FTU设备可以检测到故障信息为-1的馈线区段进行“或逻辑”运算[15]。
3 BPSO算法的改进
种群在不断迭代过程中,当其中某一粒子出现 “局部最优”的情况时,周围的其他粒子将会逐渐向其靠近,最终导致粒子群失去原本的多样性特征,发生“早熟”现象。因此,需要对二进制粒子群中的自适应变化率进行改进处理,改进公式如下:
(7)
式中,g表示种群迭代至第6代时的变化率,f(k)表示迭代次数为k代时的适应度值。
假定ω的值会随着g的变化而自适应取值,定义公式如下:
(8)

3.1 改进的BPSO算法的应用流程
基于智能终端设备的故障定位的本质就是找到最符合真实故障情况的故障场景。由于故障电流信息是由“0”和“1”组成的离散信息,当使用改进的BPSO算法进行优化时,需要把三维连续空间里的寻优问题转变为对多维离散空间中的粒子群进行寻优。选用粒子所处的空间位置表示馈线状态信息,每一次迭代结束以后都利用评价函数对对粒子所处的空间位置进行优劣判断,再对新一代粒子所处的空间位置进行更新,直到满足收敛条件时结束,此时获得粒子所处空间位置。具体操作流程如下:
1)初始化操作,设定粒子群的规模大小Q,迭代次数为N,随机产生粒子群体的x维离散空间,记为(L1,L2,L3,…,Lj,…,Lx),联络开关信息记为S,电流信息序列为(I1,I2,…,IS),由配电网的拓扑结构明确S与L的对应关系;
2)选择序列I为参考点,计算第j个粒子与参考点之间的欧氏距离,记为Dj;
4)算法迭代过程中,赋予每一个粒子的运动方向以及一个随机数rand,rand∈(0,1),并作为下一代粒子空间位置更新的依据。依照公式(9)进行操作:

(9)
5)对迭代次数N以及评价函数F(Sc)进行判断,如果满足条件则停止迭代,否则继续进行迭代直到满足终止条件;
6)输出F(Sc)对应的粒子所处的空间位置,得到馈线区段的状态信息。
图2为采用改进的BPSO算法的流程图。

图2 算法流程图
3.2 仿真分析
本文选用含DG电源的33节点进行讨论分析,见图3所示,针对不同的故障点特征信息,均采用本文改进的BPSO算法以及传统的BPSO算法进行仿真。本文的所有实验均利用MATLAB软件完成。

图3 IEEE33节点配电网图
3.3 两种算法的仿真对比
分别对表1中的4种状态进行仿真分析,见图4所示。
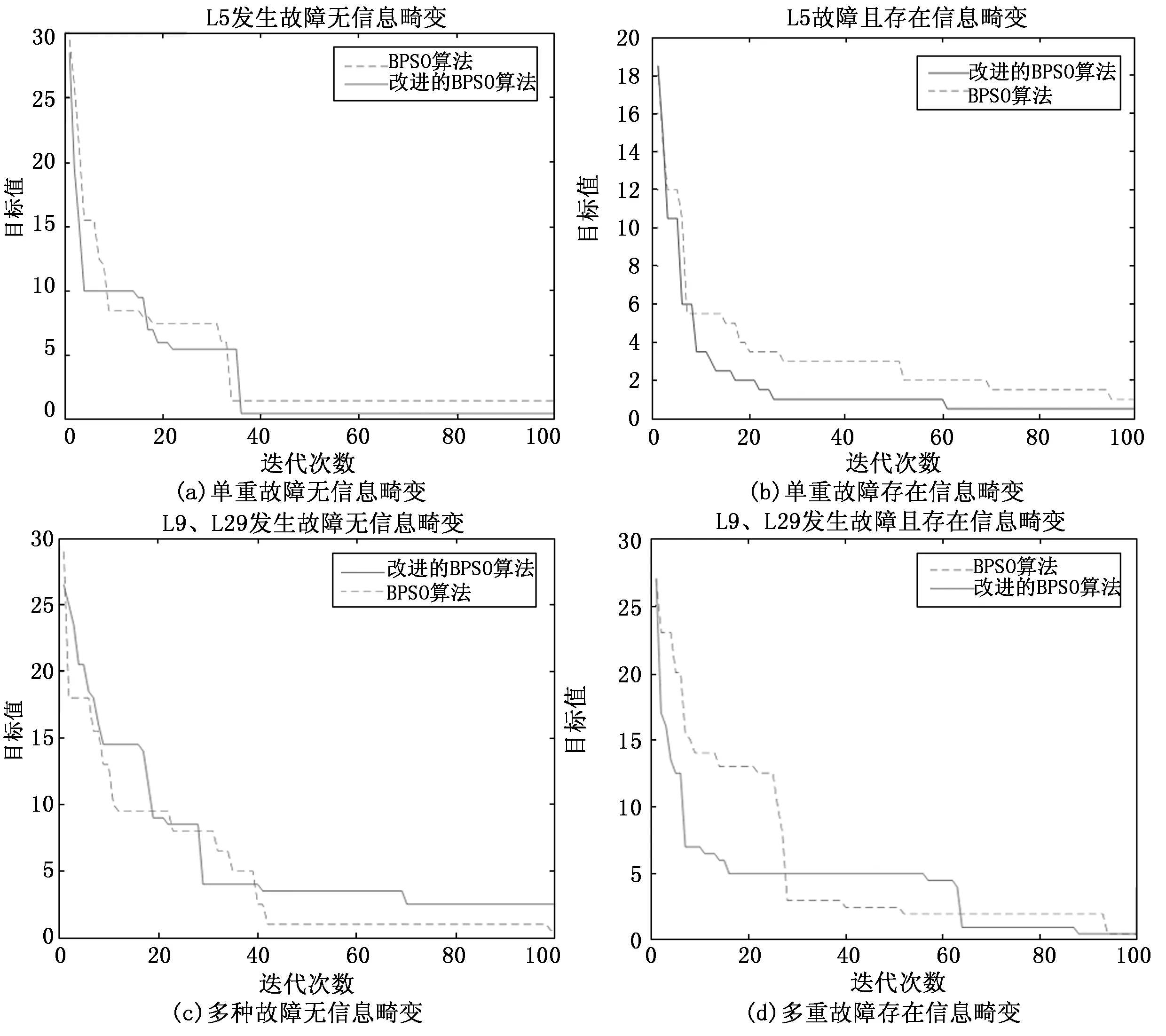
图4 两种算法的仿真分析图
3.4 节点数对配电网故障检测精度的影响
为保证实验数据的准确性,选用表1中的第2种故障状态以及第4种故障且分别进行100次的仿真实验。

表1 两种算法的仿真对比图
通过利用IEEE33节点的仿真分析可知,改进的BPSO算法完全适用于含DG配电网的故障检测,并且改进算法的收敛速度比传统算法的收敛速度更快。从仿真的结果图来看,改进的BPSO算法可以对单重故障、或者多重故障进行准确定位,与传统的BPSO算法相比较,本文改进算法的迭代次数减小,检测精度也明显提高。
从表2中的数据可以看出,不论是发生单重故障还是多重故障情况,当节点数增加时,采用智能算法的检测率都会随着节点数的增加而减小。这也就验证了节点数对配电网故障检测存在一定影响。从表2中的整体数据来看,不论节点选用哪一类节点进行仿真分析,改进后的BPSO算法的检测精度都优于未改进的BPSO算法。

表2 3种不同节点的精确度对比
3.5 容错性分析
考虑到FTU终端设备一般安装与户外,受天气、地理因素影响较大,导致出现故障信息传送至SCADA信息时存在漏报、误报等情况。本文选用图5所示的配电网图进行仿真分析。

(a)L5故障区段检测图
从表3中的数据可以看出,当FTU终端设备出现漏报或者误报情况时,当未接入DG电源时,采用改进的BPSO算法的迭代次数最小;不论是否接入DG电源,采用改进的BPSO算法都能进行准确定位,都能够在60代以前检测到故障区段,验证了本文选用算法的容错性好于传统算法。

表3 容错性分析记录表
4 结束语
本文采用一种改进的BPSO算法,通过对自适应值得改进来防止算法“早熟”,更大概率的找寻到最优解;通过IEEE33节点配电网的仿真结果可知,改进的BPSO算法能够进行准确定位;其次,伴随着节点数的增加,配电网的检测精度也会随之降低;最后,对改进的BPSO算法与BPSO算法的容错性进行了分析,改进的BPSO算法容错性明显优于BPSO算法,再次验证了本文改进算法的可行性和有效性。
猜你喜欢
新视线·建筑与电力(2021年2期)2021-09-10
北京信息科技大学学报(自然科学版)(2021年2期)2021-05-20
阅读(快乐英语高年级)(2019年2期)2019-09-10
神州·下旬刊(2018年9期)2018-10-28
电子技术与软件工程(2018年12期)2018-02-25
分析化学(2018年12期)2018-01-22
中小学实验与装备(2016年6期)2017-01-19
飞碟探索(2015年8期)2015-10-15
环球时报(2009-12-25)2009-12-25
中小企业管理与科技·下旬刊(2009年12期)2009-06-21