基于无人机平台的柑橘树冠信息提取
2021-03-31 13:47束美艳李世林魏家玺车荧璞李保国马韫韬
农业工程学报 2021年1期
束美艳,李世林,魏家玺,车荧璞,李保国,马韫韬
·农业航空工程·
基于无人机平台的柑橘树冠信息提取
束美艳,李世林,魏家玺,车荧璞,李保国,马韫韬※
(中国农业大学土地科学与技术学院,北京 100193)
为了快速获取柑橘树冠信息,提升柑橘园精准管理,该研究基于无人机平台获取了柑橘数码和多光谱影像,分析了无人机影像反演柑橘树冠信息的效果。首先利用无人机数码影像及分水岭算法进行柑橘单木分割,然后构建柑橘树冠层高度模型,提取柑橘株数、株高、冠幅投影面积等结构参数信息,进而利用无人机多光谱影像获取柑橘的8种常用植被指数,采用全子集分析法筛选柑橘冠层氮素含量的敏感植被指数,构建基于多元线性回归的冠层氮素遥感反演模型,进行以冠幅为基本单元的柑橘树冠层氮素含量遥感制图。研究结果表明:柑橘的单木识别准确率在93%以上,召回率在95%以上,平均值为96.52%;柑橘树的反演株高与实测株高具有较强的相关性,决定系数2为0.87,均方根误差为31.9 cm;单株冠幅投影面积与人工绘制的冠幅面积的决定系数,除果园A在12月的结果较低(2为0.78)外,其余均在0.94及以上;采用全子集分析法筛选的柑橘冠层氮素敏感植被指数为归一化植被指数(NDVI)、绿色归一化植被指数和冠层结构不敏感指数,所建立的多元回归模型的决定系数2达0.82,均方根误差为0.22%,相对误差为6.59%。综上,无人机影像在柑橘树冠参数信息提取方面具有较好的应用效果,能够快速有效地提取柑橘树冠参数信息。该研究可为使用无人机平台进行果园精准管理提供技术支撑。
无人机;图像处理;多光谱;柑橘;株高;冠幅投影面积;冠层氮素含量
0 引 言
柑橘是世界重要的经济作物[1]。在中国,柑橘种植区目前主要分布在甘肃–陕西–河南–江苏一线以南,遍及全国的20多个直辖市(市、自治区),柑橘产业逐渐成为当地农村经济的支柱和特色产业,对中国农业经济发展发挥着重要的作用[2]。目前欧美国家综合应用卫星遥感、航空遥感和地面行走式探测装备等的“天-空-地”一体化集成技术,进行实时高效的农作物生长动态监测、营养诊断和病虫害、花量、挂果量等的预测,并依据个体差异,进行个性化精准管理[3-4]。目前,国内大多数果园的管理模式粗放落后,对劳动力依赖程度高,科技支撑力量不足[5]。
精准农业的核心理念是变量管理。对于果园的管理,就是要依据单株果树个体或者果园小群体间的差异,进行精准定位,实施择时、变量的田间管理,这是解决目前果园管理粗放落后的有效途径[6-7]。对于果园精准管理,首先需要解决的是果树冠层结构信息的快速提取。目前一些田间果树长势信息如株高、冠幅、氮素营养、花量、挂果量、产量等数据的采集大多依赖于人工实测,存在人力投入大、效率低、覆盖率低和具有破坏性等缺点[8]。
遥感技术以其空间覆盖广、效率高和无破坏性等特点被广泛应用于农业生产及监测过程[9-12]。特别是近年来发展迅速的无人机监测技术,以其灵活机动、成本低、分辨率高的优点,成为获取作物生长信息的重要手段[13]。因此,利用无人机遥感平台替代传统果树生长信息采集方法,及时、有效地为果园精准管理服务,满足果园经营管理者获知田间果树生长信息的需求,对精准果园的发展具有重大意义。
本文旨在构建基于单木分割的柑橘树冠结构和营养信息无人机监测方法,在对果树单株识别上,采用基于冠层高度模型(Canopy Height Model, CHM)的分水岭算法进行单木分割,实现每株果树的空间位置轮廓范围的全覆盖标记,进而提取柑橘株数、株高、冠幅投影面积(Crown Projection Area, CPA),然后利用无人机多光谱影像开展单株氮素营养状态监测,并结合田间实测样本进行精度验证。
1 材料与方法
1.1 试验区域概况
本文研究区(图1)为广西壮族自治区南宁市的2个柑橘果园,果园A(108.29° E,23.19° N)和果园B(108.06°E,22.79°N)相距约50 km。其中果园A总面积约37.33 hm2,果园B总面积约13.33 hm2。该区域属于湿润的亚热带季风气候,光热充足,雨量充沛,年平均气温21.7 ℃,年均降雨量1304 mm。2个园均为浅丘山地果园,平均坡度小于2 %,均种植晚熟杂交柑橘品种沃柑,沃柑属于晚熟高糖柑橘品种,树冠呈圆头形,树姿开张,果实扁平,平均单果质量约170 g,单株产量约60 kg。其中园区A为5a树龄沃柑;园区B为2a树龄沃柑。柑橘种植为定植方式,定期对树木形状进行适当的修整,以保证果树枝条处于更新状态。主要施用有机肥。柑橘树通常要求土壤含水率在60%~80%之间,低于60%则进行灌溉。病虫害防治采用物理方法,如荧光灯诱杀果夜蛾、小实蝇等。经取土样检测,果园A的土壤全氮含量为1.77%,果园B的土壤全氮含量0.66%。
1.2 试验方法
1.2.1 研究方案
本研究技术路线主要包括5个阶段:1)无人机影像获取和预处理;2)基于数码影像的冠层高度模型(Canopy Height Model,CHM)的生成和单木分割;3)基于单木分割结果进行单株识别和株数、株高、冠幅投影面积等信息的提取;4)利用多光谱影像进行园区尺度的单株冠层氮素含量诊断。5)精度验证。具体技术流程如图2所示。
1.2.2 无人机影像采集及预处理
选用四旋翼无人机航拍系统PHANTOM 4 RTK (SZ DJI Technology Co., Ltd. China)(图3),同步搭载高清数码相机与多光谱相机,其主要参数见表1。
分别在柑橘生长的夏梢期(果园A为2018年6月28日,果园B为6月30日)和果实成熟前期(果园A为2018年12月22日,果园B为2018年12月20日)进行航拍,每次拍摄的天气条件均为晴朗、无云、风速低于4级。航向和旁向重叠度均设置为80%,飞行高度30 m,相机拍摄间隔2 s,飞行速度依据重叠度和飞行高度自动生成;然后将规划好的飞行任务导入至飞行控制软件Litchi(SZ DJI Technology Co., Ltd. China)中,通过Litchi软件控制飞行。起飞前,将无人机多光谱标准白板(规格为10 cm ×10 cm)置于距离多光谱镜头约1 m的正下方进行白板拍摄,用于后期数据的辐射定标。

表1 无人机平台主要参数
将获取的高清数码影像导入到Pix4d Mapper软件(version 4.0, PIX4D, Lausanne, Switzerland)中进行预处理。生成与原始图片相同地面采样距离(Ground Sample Distance,GSD)正射拼接图像(GSD为0.82 cm)、三维点云。首先通过寻找相邻图像对间的同名特征点进行匹配,得到稀疏点云。然后基于关键匹配特征点生成稠密点云、二维正射拼接图像和数字表面模型(Digital Surface Model, DSM)。这些三维重建点云都带有水平位置信息,其中正射拼接图像和DSM分别含有每个重建点的颜色和高程信息。利用ArcGIS软件(Environmental Systems Research Institute, Inc., California)中的Georeferencing工具对采集的2期数据进行地理配准,使其具有相同的相对地理位置。
对于多光谱影像,同样采用Pix4DMapper进行2期数据的正射校正和自动拼接,并基于起飞前拍摄的标准白板进行多波段反射率相对校正。获取的多光谱空间分辨率为3.42 cm/pixel。
1.2.3 全氮测定
每次对试验园区进行航拍后,立刻在选定的柑橘样本植株的冠层中上部四周采集成熟的营养枝叶,每株果树大约采集叶片20~30片,采集好的叶片分别按样本序号装入保鲜袋中,并立即带回实验室进行元素测度分析。将采集的叶片样本用清水清洗干净并过去离子水,放入烘箱,在105 ℃条件下杀青30 min,随后在75 ℃下连续烘干至恒质量并研磨成粉末,装入密封袋留存备用。全氮的测定采用凯氏定氮法,共测试31个样本,其中果园A样本15个,果园B样本16个。
1.2.4 冠幅及株高测定
传统的树冠幅投影面积野外测量一般通过分别测量南北向和东西向的树冠宽度,两者乘积再乘以一个经验系数,近似估算冠幅投影面积。本文以无人机数字正射影像为底图,手动勾绘单木冠幅边界,同时使用Pix4Dmapper的Mensuration测量工具依次勾绘样本果树的轮廓,并计算单株冠幅投影面积。冠层株高是指冠层顶部距离地面的垂直高度。利用塔尺在植株原位测量柑橘冠层株高。
1.2.5 柑橘树冠结构参数提取
由于果园内生长着一定的杂草、小灌木等低矮植被,与柑橘果树冠层的反射光谱很接近,无人机数码影像的光谱信息不足以准确提取柑橘果树。高分辨率的冠层高度模型CHM可以很好地分离复杂背景。CHM一般用DSM和数字高程模型(Digital Elevation Model, DEM)作差得到。DSM和DEM通过分类后的密集点云插值生成。
柑橘树的点云滤波生成:点云滤波是从密集点云中将地面点与非地面点分离,在Matlab 2016软件利用渐进加密三角网滤波算法分离地面点[14-15],通过选取区域内高程最小值作为种子点生成一个三角网,然后通过迭代处理逐层加密筛选是否为地面点,直至所有地面点分离结束。
冠层高度模型(CHM)的生成:将点云滤波后分离出的地面点云和全部的稠密点云运用反距离加权插值,设置空间分辨率为0.1 m×0.1 m,分别生成数字高程模型(DEM)和数字表面模型(DSM),将两者相减得到冠层高度模型(CHM)[16-17]。
分水岭分割:基于冠层高度模型的单木分割方法可以视作针对灰度图像的处理技术,分水岭分割运行速度快,并且可以敏感地识别图像的细微变化[18-19]。本文基于冠层高度模型采用分水岭分割算法进行单木分割。将树冠的最高点的视为“集水盆”的最低点,即首先对冠层高度模型求补集,进行地形倒置,树冠的轮廓边缘即为分水岭,从而实现树冠边界提取。
1.2.6 柑橘单木冠层氮素含量反演
无人机多光谱影像中的近红外、红边、红光波段对于植被营养状态具有较好的指示意义[20-21]。根据已有研究结果,利用无人机多光谱影像进行8个常用植被指数(表2)计算,将柑橘叶片氮素实测样本与各植被指数进行相关性分析,筛选敏感植被指数,利用全子集回归进行最佳变量组合优化,构建线性回归模型,反演以单木冠幅为基本单元的园区尺度柑橘树冠层氮素含量。

表2 植被指数计算公式
注:B1、B2、B3、B4、B5分别代表蓝、绿、红、近红外、红边波段的DN值。
Note: B1, B2, B3, B4 and B5 represent the DN values of blue, green, red, near-infrared and red-edge bands respectively.
1.2.7 精度验证
引入信息检索与统计学中的准确率(Precision)、召回率(Recall)和值()进行单木分割精度评价,其计算式如下:
式中TP、FP、FN分别表示被正确分割出的果树株数、被多分割出的果树株数和遗漏未被分割出的果树株数。准确率表示在所有果树分割结果中被正确分割出的果树株数所占比例。召回率表示被正确分割出的果树株数占果园中实际所有果树株数的比例。是对准确率和查全率的综合描述,当果园中所有果树都能被正确分割出来时,=100%;反之,果园中所有果树被分割成伪果树时,=0;越高代表分割结果越好。
将单木分割提取的冠幅投影和手动勾绘的冠幅投影、冠层高度模型 (CHM)提取的株高和实测值、冠层氮素预测值与实测值进行比较并建立1:1散点图。以决定系数2、均方根误差RMSE作为评价指标,其计算公式分别如下:
2 结果与分析
2.1 单木识别与株数统计结果与分析
图4为滤波后的果园点云。可以看到果树与地面能够有效地区分开。通过目视标记与分割算法自动识别的果树株数进行对比,计算准确率、召回率、值等精度指标,结果如表3。从准确率来看,柑橘单木的整体识别准确率较高,在93%以上,说明柑橘错分现象不明显;柑橘单木召回率在95%以上,说明本研究可以较好地抑制果树漏分的现象;果园柑橘单木识别的平均值为96.52%。
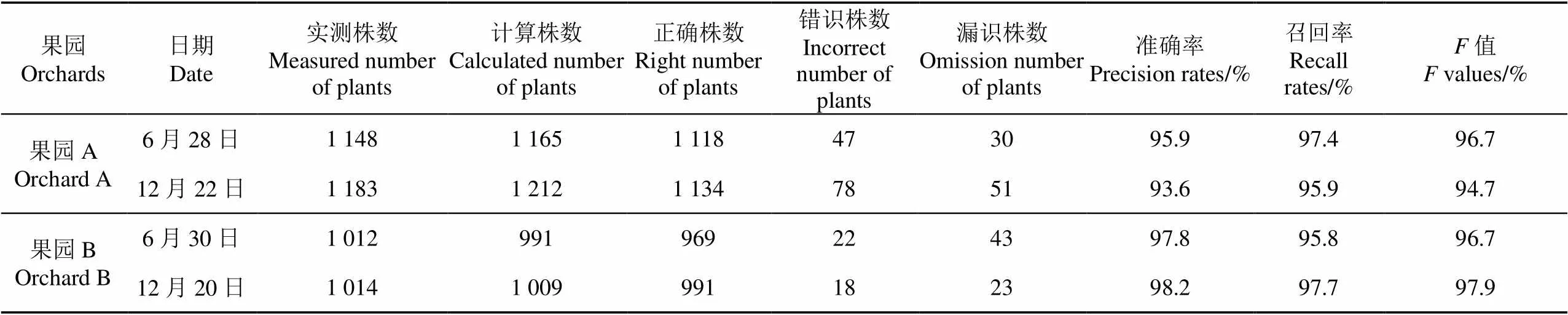
表3 单木识别和株数统计结果
由表3结果可知,果园A在12月的错分和漏分现象明显,主要是由于果树在生长后期树枝分散,呈心形,果树单木顶点不明显,容易造成分割过度,错分现象增多,同时单木树冠相连处较多,林窗间隙小、树缘处枝叶堆积推高了边缘高程,使得冠层高度模型中单木区别不明显,导致漏分较多。果园B的准确率整体上高于果园A,这是因为果园B的树高较小,树冠相连情况少,因此树冠大多能较好识别出。但树冠面积较小,株高较矮,存在较多背景噪声被识别为伪单木,同时也导致一些株高过低的果树被漏分。从6月到12月,随着果园B的果树生长,果园整体株高增加,错分、漏分现象得到抑制,各评价指标均有所提高。
2.2 单株冠幅面积提取结果与分析
图5是果园局部基于冠层高度模型的分水岭分割过程。从图中可以看出所有果树均能被识别。图6为冠幅投影面积手动测量值与提取值的结果,从图中可以看出,2个果园的冠幅投影面积的提取精度均较好。果园A在12月的2为0.78,低于其他3组结果,这主要是受单木分割的精度影响,果园A在12月的错分和漏分现象多,因此导致自动提取的冠幅投影面积与手绘冠幅投影面积差异较大,如图7所示。此外,冠幅面积自动分割结果比手工勾绘大0.47%,这是由冠层高度模型的分辨率低造成的。冠层高度模型的分辨率是单木分割精度的重要影响因素[30],冠层高度模型分辨率设置过高,对冠层高度刻画过细,容易分割出过多伪单木,造成过度分割;而分辨率设置过低,则会造成漏分现象增多。本文经过多次冠层高度模型分辨率调优,在冠幅面积自动分割与手工勾绘结果相关系数最大的情况下得到冠层高度模型的最佳分辨率为0.1 m。图6为最佳分辨率下果园A和果园B冠幅投影面积的提取值和手动测量结果。
2.3 株高提取结果与分析
目前,基于无人机遥感技术的单木树高获取大多是基于冠层高度模型进行的。冠层高度模型作为归一化的高程信息,去除了果园地形起伏的影响,直接反映了果树的冠层高度分布信息,因此通过匹配每一株果树在冠层高度模型的中心位置即可提取果树的单株株高。本文基于冠层高度模型结合单木分割结果,计算单株果树株高。图8为插值生成的DEM、DSM和经栅格运算形成的CHM。
将获取的株高与实测的15株果树株高进行比较,如图9所示。通过对比可以发现,株高的计算值与实测值的相关性较好,但RMSE为31.9 cm,预测值比实测值整体偏小13.57%。
分析可知,这是因为果园的郁闭度高,裸露地面少,点云滤波未能获取到足够多的地面点,因此滤波得到的部分“地面点云”往往不能真正代表实际地面,而数字高程模型 DEM是由地面点云插值生成的,这些不能真正代表实际地面的点云整体“拔高”了DEM的高程,造成株高计算值偏低。由于果树实际株高整体较高,人为测量较为困难,测量时人处于仰视状态,读取的数值与实际株高存在一定的偏差,这也导致实际测量结果存在误差,间接影响了株高的计算精度。
2.4 冠层氮素含量反演结果与分析
采用12月在果园A与果园B采集的31个叶片氮含量作为冠层氮素样本数据。并与同时期无人机多光谱影像构建的植被指数进行分析,相关系数结果如图10。由图10可知,除NRI外,其余植被指数与冠层氮素含量的相关系数的绝对值均在0.7以上,其中SIPI与冠层氮素含量呈负相关,其他植被指数与冠层氮素均呈正相关;除NDVI外,其他植被指数间的相关系数均在0.65以上,说明不同植被指数间存在多重共线性。
单一植被指数易受土壤背景、光谱饱和性等因素的影响,采用多植被指数的联合反演可有效提高模型的适用性和反演精度。本研究选择全子集回归法来选择冠层氮素含量的最佳预测变量组合,在R Studio软件中基于R 3.1 leaps包中的regsubsets函数实现,结果如图11所示。采用线性回归算法构建冠层氮素含量反演模型。
由图11可知,NDVI、GNDVI、SIPI的组合可以使用最少的预测变量获得最佳的调整2,因此选择NDVI、GNDVI、SIPI作为预测变量建立冠层氮素反演模型。选择留一法交叉验证进行模型评估,结果显示采用组合植被指数的冠层氮素反演2为0.82,RMSE为0.22%,MAE为6.59 %,如图12。
根据相关研究[31-32],柑橘叶片氮素的适宜含量在2.8%~3.2%之间,结合柑橘冠层反演结果,果园A的柑橘冠层氮素含量明显超出适宜氮素范围,果园B的大部分果树的氮素在适宜范围(图13)。对比同时期测定的土壤全氮含量数据,果园B的平均全氮含量为0.66%,而果园A的土壤全氮含量高达1.77%。这说明果园A氮肥施用过量。
3 结 论
本研究通过无人机观测平台获取了柑橘果园的高清数码和多光谱图像,构建了基于单株标识的柑橘果树生长信息获取技术框架,实现了对柑橘果园的果树株数、株高、冠幅投影面积以及冠层氮素含量的快速、无损、实时监测。得到以下结果:
1)采用分水岭算法对柑橘进行单木分割,得到的果树识别准确率在93%以上,召回率在95%以上,平均值为96.52%;
2)基于冠层高度模型提取的果树株高与实测株高具有较强的相关性,模型2为0.87,均方根误差为31.9 cm;
3)对于基于数码影像提取的单株冠幅投影面积与人工绘制面积,除果园A在12月的结果较低(2为0.78)外,其余均在0.94及以上;
4)基于敏感植被指数反演的柑橘冠层氮素含量的模型2达0.82,均方根误差为0.22%,相对误差为6.59%。
本文在柑橘果树冠层理化参数无人机快速监测方面做出了初步探索,取得了较为满意的结果,对于实现果园的精准化管理具有重要的应用价值,但仍存在一些问题有待后续的研究中改进:1)本文使用了2个树龄不同的柑橘果园进行理化参数提取,对于树龄较大的柑橘果园,树冠存在部分重叠现象,影响了单木分割精度,还需进一步在更多不同树龄的果园开展方法验证;2)本文使用的冠层氮素反演方法为较常用的植被指数线性回归方法,属于经验模型,难以外推至别的果园直接应用,因此需加强果树冠层氮素机理模型研究,以提升模型的精度和普适性。
[1]刘雪峰. 柑橘植株冠层营养及花量、产量的近地遥感估测研究[D]. 重庆:西南大学,2016.
Liu Xuefeng. Estimation of Canopy Nutrition, Flower Quantity and Yield of Citrus Plant by Pow-Altitude Remote Sensing[D]. Chongqing: Southwest University, 2016. (in Chinese with English abstract)
[2]祁春节,邓秀新. 当前我国柑桔产业发展面临的重大问题和对策措施[J]. 中国果业信息,2016,33(12):9-11.
Qi Chunjie, Deng Xiuxin. Major problems and countermeasures in the development of citrus industry in China[J]. China Fruit News, 2016, 33(12): 9-11. (in Chinese with English abstract)
[3]赵春江,薛绪掌,王秀,等. 精准农业技术体系的研究进展与展望[J]. 农业工程学报,2003,19(4):7-12.
Zhao Chunjiang, Xue Xuzhang, Wang Xiu, et al. Advance and prospects of precision agriculture technology system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(4): 7-12. (in Chinese with English abstract)
[4]唐华俊. 农业遥感研究进展与展望[J]. 农学学报,2018,8(1):175-179.
Tang Huajun. Progress and prospect of agricultural remote sensing research[J]. Journal of Agriculture, 2018, 8(1): 175-179. (in Chinese with English abstract)
[5]邓秀新,项朝阳,李崇光. 我国园艺产业可持续发展战略研究[J]. 中国工程科学,2016,18(1):34-41.
Deng Xiuxin, Xiang Chaoyang, Li Chongguang. Study on sustainable development strategy of chinese horticultural industry[J]. Strategic Study of CAE, 2016, 18(1): 34-41. (in Chinese with English abstract)
[6]李金梦,叶旭君,王巧男,等. 高光谱成像技术的柑橘植株叶片含氮量预测模型[J]. 光谱学与光谱分析,2014,34(1):212-216.
Li Jinmeng, Ye Xujun, Wang Qiaonan, et al. Development of prediction models for determining n content in citrus leaves based on hyperspectral imaging technology[J]. Spectroscopy and Spectral Analysis, 2014, 34(1): 212-216. (in Chinese with English abstract)
[7]田喜,何绍兰,吕强,等. 高光谱图像信息的柑橘叶片光合色素含量分析技术研究[J]. 光谱学与光谱分析,2014,34(9):2506-2512.
Tian Xi, He Shaolan, Lv Qiang, et al. Determination of photosynthetic pigments in citrus leaves based on hyperspectral images datas[J]. Spectroscopy and Spectral Analysis, 2014, 34(9): 2506-2512. (in Chinese with English abstract)
[8]Zhang C, Kovacs J. The application of small unmanned aerial systems for precision agriculture: A review[J]. Precision Agriculture, 2012, 13(6): 693-712.
[9]韩文霆,李广,苑梦婵,等. 基于无人机遥感技术的玉米种植信息提取方法研究[J]. 农业机械学报,2017,48(1):139-147.
Han Wenting, Li Guang, Yuan Mengchan, et al. Extraction method of maize planting information based on UAV remote sensing techonology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 139-147. (in Chinese with English abstract)
[10]田明璐,班松涛,常庆瑞,等. 基于无人机成像光谱仪数据的棉花叶绿素含量反演[J]. 农业机械学报,2016,47(11):285-293.
Tian Minglu, Ban Songtao, Chang Qingrui, et al. Inversion of cotton chlorophyll content based on data from UAV imaging spectrometer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 285-293. (in Chinese with English abstract)
[11]Whitehead K, Hugenholtz C, Myshak S, et al. Remote sensing of the environment with small unmanned aircraft systems (UASs), Part 1: A review of progress and challenges[J]. Journal of Unmanned Vehicle Systems, 2014, 2(3): 69-85.
[12]李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报: 信息科学版,2014,39(5):505-513.
Li Deren, Li Ming. Research advance and application prospect of unmannned aerial vehicle remote sensing system[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513. (in Chinese with English abstract)
[13]刘建刚,赵春江,杨贵军,等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报,2016,32(24):98-106.
Liu Jiangang, Zhao Chunjiang, Yang Guijun, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 98-106. (in Chinese with English abstract)
[14]岳桂昌,周玉娟. 一种改进的基于TIN渐次加密的LiDAR点云滤波算法[J]. 地理信息世界,2017,24(1):71-75.
Yue Guichang, Zhou Yujuan. A modified TIN-based Li DAR data encryption gradually filtering algorithm[J]. Geomatics World, 2017, 24(1): 71-75. (in Chinese with English abstract)
[15]柴梦娜,刘元盛,任丽军. 基于激光点云NDT特征的两步回环检测[J]. 激光与红外,2020,50(1):17-24.
Chai Mengna, Liu Yuansheng, Ren Lijun. Two-step loop closure detection based on laser point cloud NDT features[J]. Laser and Infrared, 2020, 50(1): 17-24. (in Chinese with English abstract)
[16]刘忠,万炜,黄晋宇,等. 基于无人机遥感的农作物长势关键参数反演研究进展[J]. 农业工程学报,2018,34(24):60-71.
Liu Zhong, Wan Wei, Huang Jinyu, et al. Progress on key parameters inversion of crop growth based on unmanned aerial vehicle remote sensing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(24): 60-71. (in Chinese with English abstract)
[17]杨琦,叶豪,黄凯,等. 利用无人机影像构建作物表面模型估测甘蔗LAI[J]. 农业工程学报,2017,33(8):104-111.
Yang Qi, Ye Hao, Huang Kai, et al. Estimation of leaf area index of sugarcane using crop surface model based on UAV image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 104-111. (in Chinese with English abstract)
[18]闫鹏飞,明冬萍. 尺度自适应的高分辨率遥感影像分水岭分割方法[J]. 遥感技术与应用,2018,33(2):321-330.
Yan Pengfei, Ming Dongping. Segmentation of high spatial resolution remotely sensed data using watershed with self-adaptive parameterization[J]. Remote Sensing Technology and Application, 2018, 33(2): 321-330. (in Chinese with English abstract)
[19]沈夏炯,吴晓洋,韩道军. 分水岭分割算法研究综述[J]. 计算机工程,2015,41(10):26-30.
Shen Xiajiong, Wu Xiaoyang, Han Daojun. Survey of research on watershed segmentation algorithms[J]. Computer Engineering, 2015, 41(10): 26-30. (in Chinese with English abstract)
[20]魏青,张宝忠,魏征,等. 基于无人机多光谱遥感的冬小麦冠层叶绿素含量估测研究[J]. 麦类作物学报,2020,269(3):109-116.
Wei Qing, Zhang Baozhong, Wei Zheng, et al. Estimation of canopy chlorophyll content in winter wheat by UAV multispectral remote sensing[J]. Journal of Triticeae Crops, 2020, 269(3): 109-116. (in Chinese with English abstract)
[21]乔浪,张智勇,陈龙胜,等. 基于无人机图像的玉米冠层叶绿素含量检测与分布研究[J]. 农业机械学报,2019,50(S1):182-186.
Qiao Lang, Zhang Zhiyong, Chen Longsheng, et al. Chlorophyll content detection and distribution research of maize canopy based on UAV image[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 182-186. (in Chinese with English abstract)
[22]Huete A, Didan K, Miura T, et al. Overview of the radiometric and biophysical performance of the MODIS vegetation indices[J]. Remote Sensing of Environment, 2002, 83(1): 195-213.
[23]Schlerf M, Atzeerger C, Hill J. Remote sensing of forest biophysical variables using HyMap imaging spectrometer data[J]. Remote Sensing of Environment, 2005, 95(2): 177-194.
[24]陈玉泉,季耿善,杨静,等. 水体遥感的镜面反射特性研究[J]. 环境遥感,1994,9(3):195-202.
Chen Yuquan, Ji Gengshan, Yang Jing, et al. A study of remote sensing on water body mirror reflection[J]. Journal of Remote Sensing, 1994, 9(3): 195-202. (in Chinese with English abstract)
[25]Gitelson A A, Kaufman Y J, Merziyak M N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS[J]. Remote Sensing of Environment, 1996, 58(3): 289-298.
[26]Fitzgerald G J, Rodriguez D, Christensen L K, et al. Spectral and thermal sensing for nitrogen and water status in rainfed and irrigated wheat environments[J]. Precision Agriculture, 2006, 7(4): 233-248.
[27]宋森楠,宋晓宇,陈立平,等. 冬小麦氮平衡指数与籽粒蛋白质含量空间结构及关系[J]. 农业工程学报,2013,29(15):91-97.
Song Sennan, Song Xiaoyu, Chen Liping, et al. Spatial structure and relationships of nitrogen balance index and protein content of grain in winter wheat[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(15): 91-97. (in Chinese with English abstract)
[28]束美艳,顾晓鹤,孙林,等. 基于新型植被指数的冬小麦 LAI高光谱反演[J]. 中国农业科学,2018,51(18):3486-3496.
Shu Meiyan, Gu Xiaohe, Sun Lin, et al. High spectral inversion of winter wheat LAI based on new vegetation index[J]. Scientia Agricultura Sinica, 2018, 51(18): 3486-3496. (in Chinese with English abstract)
[29]SIPI-Penuelas J, Baret F, Filella I. Semi-empirical indices to assess carotenoids/chlorophyll a ratio from leaf spectral reflectance[J]. Photosynthetica, 1995, 31(2): 221-230.
[30]Chow T E, Hodgson M E. Effects of lidar post-spacing and DEM resolution to mean slope estimation[J]. International Journal of Geographical Information Science, 2009, 23(10): 1277-1295.
[31]王仁玑,庄伊美,陈丽璇,等. 枳砧椪柑叶片营养元素适宜含量的研究[J]. 果树学报,1993(1):3-6.
Wang Renji, Zhuang Yimei, Chen Lixuan, et al. Study on the optimum range of mineral element contents in the leaves of ‘Ponkan’ mandarin on trifoliate orange rootstock[J]. Journal of Fruit Science, 1993(1): 3-6. (in Chinese with English abstract)
[32]刘艳丽. 基于柑橘叶、花近红外高光谱信息的营养诊断与成花能力预测研究[D]. 重庆:西南大学,2015.
Liu Yanli. Research on the Nutrient Diagnosis and Prediction of Flower Bud Differentiation Ability Based on the Hyperspectral Imaging Data[D]. Chongqing: Southwest University, 2015. (in Chinese with English abstract)
Extraction of citrus crown parameters using UAV platform
Shu Meiyan, Li Shilin, Wei Jiaxi, Che Yingpu, Li Baoguo, Ma Yuntao※
(,,100193,)
Citrus fruit, one of the most important economic crops, is playing an important role in the industrial development of modern agriculture in rural China. However, the management mode of most orchards in China is currently undeveloped and extensive, particularly with high dependence on labor force, as well as insufficient scientific and technological support. In recent years, the Unmanned Aerial Vehicle (UAV) monitoring technology has become a significant way to quickly extract the structural parameters in the growth of field crops at the park scale, due to its flexibility, low cost, and high resolution imaging. This study aims to construct a monitoring system for the citrus canopy structure and nutrition information using the UAV digital and multi-spectral remote sensing, to get he with the single tree segmentation. The UAV digital images and watershed algorithm were used to segment the structural dataset of citrus canopy, and then the canopy height model of citrus trees was established to extract the plant height using digital surface module. Structural parameters were also calculated, such as the number of citrus trees, and canopy projection area at the park scale. In addition, the UAV multispectral images were used to obtain eight common vegetation indexes, thereby to predict the nitrogen content of canopy in the citrus trees. The whole subset analysis was used to screen the sensitive vegetation index for the nitrogen content of canopy in the citrus trees. The inversion model of canopy nitrogen was constructed using the multiple linear regression. The remote sensing mapping was carried out to estimate the nitrogen content of citrus canopy in park scale. The results showed that: 1) Since the planting density of fruit trees was low in the experimental area, there was a certain distance between trees that can be clearly distinguished. The watershed image processing was selected to segment the single tree of height model for a citrus canopy. The overall identification accuracy, recall rate, andvalue of the fruit trees were above 93.6%, 95.8%, and 94.7%, respectively, indicating that the model was well suitable to monitor the number of fruit trees in the park. 2) The canopy structure parameters of individual fruit trees were obtained in the individual tree segmentation. There was a strong correlation between the plant height of citrus trees extracted by the canopy height model and the measured value, where the2=0.87, and RMSE=31.9 cm. 3) Using the watershed segmentation, the extracted projection area of crown width per plant achieved a high correlation with the artificial sketching area. The coefficient of determination was more than 0.93 in most cases, except that of orchard A lower than 0.78 in December. Meanwhile, the extraction accuracy of the model depended greatly on the single tree segmentation. 4) In full subset analysis, the sensitive vegetation indexes were selected to determine the nitrogen content of citrus canopy, including the Normalized Difference Vegetation Index (NDVI), Green Normalized Difference Vegetation Index (GNDVI), and Structure Insensitive Pigment Index (SIPI), where the2and RMSE of the model were 0.82 and 0.22%, respectively. The data demonstrated that the nitrogen content of most fruit trees in orchard B was in the suitable range, while there was excessive application of nitrogen fertilizer in orchard A. Therefore, the UAV technology can greatly contribute to extract the physical and chemical parameters of citrus canopy, further to improve the level of accurate management of citrus on the large-scale orchard.
UAV; image processing; multi-spectral; citrus; plant height; crown projection area; canopy nitrogen content
束美艳,李世林,魏家玺,等. 基于无人机平台的柑橘树冠信息提取[J]. 农业工程学报,2021,37(1):68-76.doi:10.11975/j.issn.1002-6819.2021.01.009 http://www.tcsae.org
Shu Meiyan, Li Shilin, Wei Jiaxi, et al. Extraction of citrus crown parameters using UAV platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(1): 68-76. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.01.009 http://www.tcsae.org
2020-11-19
2020-12-15
内蒙古科技重大专项(2019ZD024)
束美艳,博士生,研究方向:数字农业。Email:2448858578@qq.com
马韫韬,博士,副教授,博士生导师,主要从事作物表型研究。Email:yuntao.ma@cau.edu.cn
10.11975/j.issn.1002-6819.2021.01.009
S779
A
1002-6819(2021)-01-0068-09
猜你喜欢
安徽农业科学(2022年19期)2022-10-29
农业工程学报(2022年12期)2022-09-09
作物杂志(2022年3期)2022-07-06
绿色科技(2022年11期)2022-07-02
草业科学(2022年3期)2022-03-26
作物学报(2022年5期)2022-03-16
绿色天府(2022年2期)2022-03-16
新疆农业科学(2021年11期)2021-12-23
农业机械学报(2021年8期)2021-08-27
水土保持研究(2014年2期)2014-05-05