仿鸟扑翼飞行器自主起降技术研究进展
2021-03-31 02:51:40马东福宋笔锋宣建林
宇航学报 2021年3期
马东福,宋笔锋,宣建林,年 鹏
(1. 西北工业大学航空学院,西安 710072;2. 西北工业大学太仓长三角研究院,太仓 215400)
0 引 言
仿鸟扑翼飞行器(Bird-like flapping-wing aerial vehicle,BFAV)是一种新概念、新原理和新技术高度集成的飞行器,具有体积小、飞行效率高、隐蔽性好等诸多特点[1-2],适合在城市楼群、密林等复杂环境中穿梭飞行甚至栖停,尤其适用于反恐、维稳和特种作战中[3-5]。装有微型摄像系统的仿鸟扑翼飞行器加装高能微型炸弹,可以作为一种隐蔽性很强的定点精确攻击武器,同时,通过组网方式可组成微型战斗群,大幅提高单体作战效能[6]。自1996年美国国防高级研究计划局(Defense Advanced Research Program Agency,DARPA)启动“微型飞行器”研究计划以来[7-8],短短20多年的时间,仿鸟扑翼飞行器的研制已经取得诸多显著成果,其中具有代表性的有美国马里兰大学的Robo-Raven[9-10],德国Festo公司的Smartbird[11],中国西北工业大学的“信鸽”[12]等。
仿鸟扑翼飞行器在飞行时,所携带能源有限,要求它在执行任务的过程中尽最大可能节省能源。同时在此过程中,其所处任务环境复杂多变(如在侦查敌情时,要求其隐蔽在某个角落进行定点监控,完成监控后再次起飞执行下一个任务),飞行器需在任意时间和地点完成降落或者起飞动作以应对随机发生的状况,而这一动作则是需要在没有人为干预或间接干预的情况下完成,于是就要求仿鸟扑翼飞行器必须具备消耗少量能量的自主起降能力。目前仿鸟扑翼飞行器自主起降相关研究还较少,且仅有为数不多的仿鸟扑翼飞行器具备自主起降能力,如DARPA委托美国航空环境公司研制的Nano Hummingbird[13]、斯坦福大学研究中心和多伦多大学合作研制的Mentor[14],但该两种飞行器还均无法兼顾平飞,而对于Robo-Raven[9-10]、“信鸽”[12]等极大多数仿鸟扑翼飞行器来说,仍采用手抛起飞的方式。随着仿鸟扑翼飞行器研究日益成熟,自主起降已经成为其走向实用化道路亟需攻克的关键技术之一,并逐渐被重视起来,然而受限于结构重量、能源动力等诸多问题,该技术仍面临巨大的挑战[3-4]。
1 鸟类起降动作研究
科学家们从飞鸟获得灵感创造出了仿鸟扑翼飞行器,因此研究鸟类起降机理,对仿鸟扑翼飞行器自主起降研究具有指导意义。起飞、降落是鸟类在栖息地和空中飞行两种状态之间的转变,需要翅膀、腿和尾巴等部位共同协作完成,是鸟类生存最重要的动作之一,尤其是在躲避天敌时,起飞动作直接决定了其被杀死的概率[15-17]。鸟类起飞要比在空中飞行困难且复杂得多,因为鸟类必须提供大于自身重力的升力才能离开所栖息的位置;降落时,则与起飞动作相反,需升力小于自身重力,同时降低飞行速度[15,18]。
鸟类从栖息地到空中转变时,最重要的是达到起飞速度[19]。对于可实现悬停的蜂鸟,其升力产生的机制和昆虫比较相似[20],即通过翅膀的高频翻转扑动,使得其在上扑和下扑行程中均产生升力[21-22],从而可以垂直起飞,而对其它大部分鸟类来说,则需要借助其它一些方式。跳跃作为一种短时间内获得高速的极为有效的方法[23],被诸多鸟类采用。起飞时,腿部提供了主要初始加速度,当脚离开栖息地时,翅膀承接后续运动。斑马雀和钻鸽通过跳跃可获得90%起飞加速度,而欧洲椋鸟则高达95%[24]。但当鸟类无法通过跳跃起飞时,则需要通过腿部奔跑和翅膀扑动协同加速,在红喉潜鸟水面起飞过程中,这一起飞速度为10 m/s[25]。另外当鸟类处于树枝、杆塔或者峭壁等较高的地方时,则选择张开翅膀从高处下落,拍打翅膀滑翔起飞,这是一种相对省力的起飞方式。

图1 鸟类起降Fig.1 Birds take-off and landing
鸟类从空中到栖息地转变时,主要根据着陆点的特征做出相应决策,提前将速度降低以增大着陆的准确性和安全性[26]。着陆前,通过减小翅膀的扑动频率、扑动幅度,调整翅膀、身体及尾巴的姿态增加飞行阻力;着陆时,翅膀和尾巴维持平衡,腿和脚则用来起支撑和缓冲的作用[18,27-28]。
由上述可知,鸟类具有原地垂直起飞(蜂鸟)、跳跃起飞、奔跑起飞、滑翔起飞四种起飞方式。原地垂直起飞时,翅膀以特殊的运动规律扑动,同时获得升力和推力完成起飞;跳跃起飞时,通过腿部力量以一定角度起跳提供主要的起飞初始速度和加速度,脚离开栖息地的同时,翅膀快速扑动提供升力和推力完成起飞;奔跑起飞时,通过快速奔跑产生向前的初始速度和加速度,同时伴随翅膀扑动进行加速,当达到起飞速度时完成起飞;滑翔起飞时,从高处跃下,同时扑动翅膀,利用重力加速从而完成起飞。而鸟类降落时,则是通过改变翅膀的形状及身体姿态减速,完成降落。
综上,通过对鸟类起降方式学习,可以将其原理应用到仿鸟扑翼飞行器垂直起降、弹跳起降、滑跑起降和滑翔起降的自主起降方案设计中。
2 自主起降技术研究进展
在实际使用时,仿鸟扑翼飞行器通过某种特定的方式自主起飞并快速进入飞行状态,然后在任务需要时降落。结合鸟类起降方式和目前仿鸟扑翼飞行器自主起降研究成果,仿鸟扑翼飞行器自主起降技术可归纳为下述类型。
2.1 垂直起降技术
1)尾座式垂直起降技术
通过实验、仿真计算等手段,蜂鸟翅膀的运动规律及相关气动机理已逐渐被学者们所揭示[20-22],模仿蜂鸟翅膀特殊运动使仿鸟扑翼飞行器垂直起降成为可能。如图2(a)所示,由DARPA委托美国航空环境公司研制的Nano Hummingbird[13],起飞总重19.0 g,扑动频率30 Hz,具有自主起降、悬停的能力,可实现6.7 m/s的最大前飞速度,航时4 min,同时还可携带摄像头等任务设备。如图2(b)所示,比利时布鲁塞尔自由大学研制的Colibri[29],起飞总重22 g,扑动频率22 Hz,可实现垂直起降、稳定悬停及前飞。如图2(c)所示,中国北京航空航天大学研制的仿蜂鸟扑翼飞行器[30],起飞总重25 g,扑动频率35 Hz,可实现垂直起降、稳定悬停及简单机动。
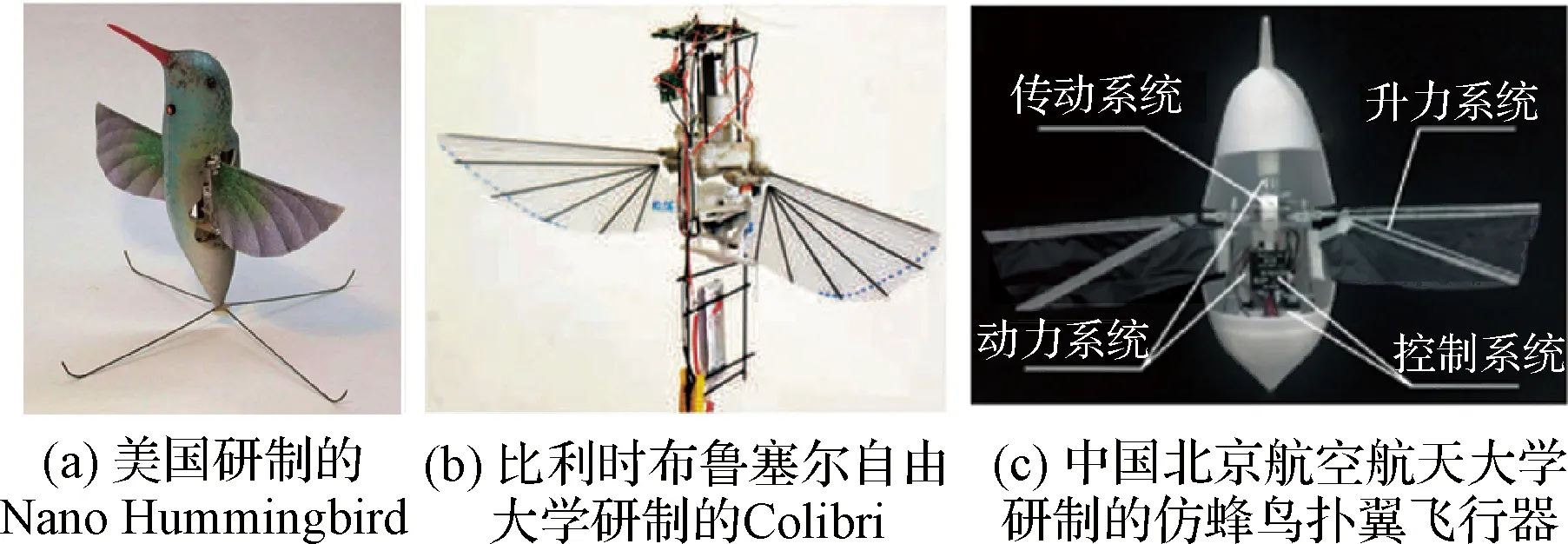
图2 仿蜂鸟扑翼飞行器Fig.2 Hummingbird-like flapping-wing aerial vehicle
采用尾座式垂直起降技术,使仿鸟扑翼飞行器具有了良好的自主起降性能,但同时也带来了载重小、航时短等其他问题。对一般仿鸟扑翼飞行器来说,在飞行过程中,其扑动平面几乎时刻保持竖直状态,扑动频率和扑动幅度相对较低;而由于采用该技术,在起降期间,机翼的扑动平面几乎水平,同时扑动频率和扑动幅度均较大,飞行器功耗较高,若持续以该姿态前飞,那么将对飞行器的航时十分不利,因此起降、平飞之间的转换尤为重要。
然而这一转换过程,仍存在诸多问题。起降阶段,机翼高频、大幅扑动,同时为使飞行器拥有较为合理的稳定性和操纵性能,需要将重心布置在机身后部适当远离机翼焦点的位置;平飞阶段,则是需要机翼以较小的幅度和频率扑动,同时要将重心适当接近机翼的焦点。目前大多数仿鸟扑翼飞行器的驱动机构只能实现特定运动规律[3-4],这种扑动参数的变化和重心位置的变化对机构设计提出新挑战;与此同时,仿蜂鸟扑翼飞行器控制研究,也主要集中在悬停等单一飞行状态下,因此不同飞行状态之间的转换控制也需要进一步突破[31-33]。
2)混合布局垂直起降技术
旋翼飞行器最大的特点便是可实现垂直起降,这也为仿鸟扑翼飞行器垂直起降带来另外一条解决思路。
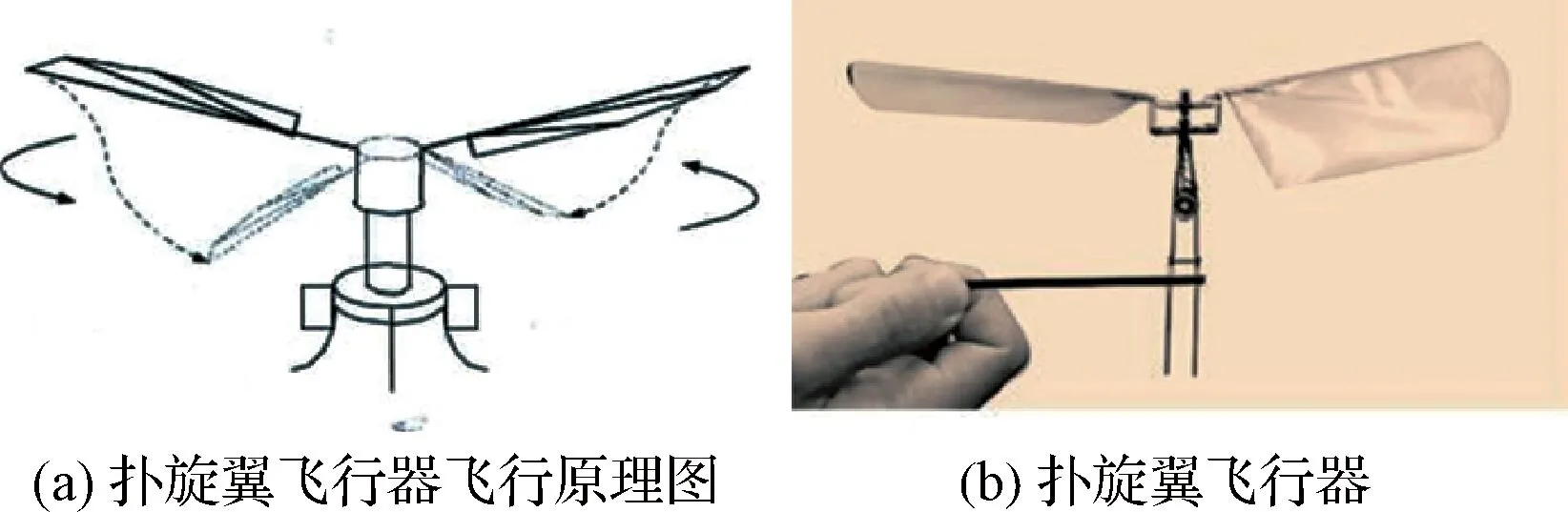
图3 微型扑旋翼飞行器Fig.3 Flapping-rotor wing micro aerial vehicle
目前旋翼+扑翼的布局形式主要有两种,一种是扑旋翼,如图3(a)所示,其通过一对绕中心轴旋转的扑动翼上下扑动产生水平力矩驱动扑动翼被动旋转,在扑动翼扑动和旋转的过程中产生升力,可实现垂直起降[34-35]。如图3(b)所示,由英国克兰菲尔德大学、中国北京航空航天大学以及北京理工大学的扑旋翼研究团队合作制作的机械式扑旋翼,实现了该类布局飞行器的首次垂直起降飞行[36]。该种飞行器从布局到飞行方式都与本文所研究的仿鸟扑翼飞行器相去甚远,其对仿鸟扑翼飞行器自主起降技术研究指导性意义不大,因此不再过多叙述。
另一种布局形式类似于旋翼固定翼复合式无人机[37-39],在这里将它称为混合布局。文献[40]详细介绍了一种三旋翼混合布局形式,如图4(a)所示,在该设计中,仿鸟扑翼飞行器的尾翼被三旋翼的尾桨替代用来纵向配平和操纵,通过旋翼和扑翼的混合布局,使其兼具垂直起降、悬停和快速平飞的能力。文献[41-42]则是设计了一种四旋翼混合布局的仿鸟扑翼飞行器,如图4(b)所示,两对螺旋桨体对称安装在仿鸟扑翼飞行器中,以满足起降和悬停的任务要求,而平飞由扑翼模式完成,目前其原理样机虽已制作出来,但还未进行相关飞行实验。

图4 混合布局垂直起降仿鸟扑翼飞行器Fig.4 Hybrid vertical take-off and landing BFAV
混合布局垂直起降技术,最大的特点是以旋翼垂直起降和悬停的优势弥补了仿鸟扑翼飞行器自主起降功能缺陷,另外当在任务过程中,扑翼功能失效时,还可利用旋翼模式使飞行器继续飞行,从而提高了飞行器的生存力,虽然目前尚未出现利用该技术成功飞行的仿鸟扑翼飞行器,但其仍是一种较为可行的技术方案。引入旋翼后,其布局成为关键,不同的布局形式所对应的结构重量、功耗、控制策略等均有所差异,这与旋翼固定翼复合式无人机有诸多相似地方,但在细节上又存在巨大差异。混合布局仿鸟扑翼飞行器主要运动为机翼上下扑动,旋翼与扑翼之间相互气动耦合影响仍不清晰,旋翼模式与扑翼模式状态的转换控制也需要进一步研究。
2.2 弹跳起降技术
将弹跳技术用于仿鸟扑翼飞行器上,使其起跳到一定高度并获得初速度完成自主起飞,逐渐成为学者们研究的热点。Hudson等[43-44](见图5(a))、中国江西理工大学熊康太[45](见图5(b)),从仿生学角度对鸟类起降过程进行细致分析,分别设计了不同结构的弹跳机构,通过建模、仿真初步校验了仿鸟扑翼飞行器弹跳起飞技术的可行性;英国曼彻斯特大学Sivalingam[46]以仿鸟扑翼飞行器弹跳起飞为目标,设计、制作了一种直压式弹簧弹跳机构(见图5(c)),通过测试其已具备一定弹跳性能,但仍需在体积、结构重量等方面进行进一步优化;中国东南大学Zhang等[47]基于多平行四边形机构,设计、制作了一种弹跳与扑翼多模式复合运动的仿鸟扑翼飞行器(见图5(d)),但尚未成功起飞。
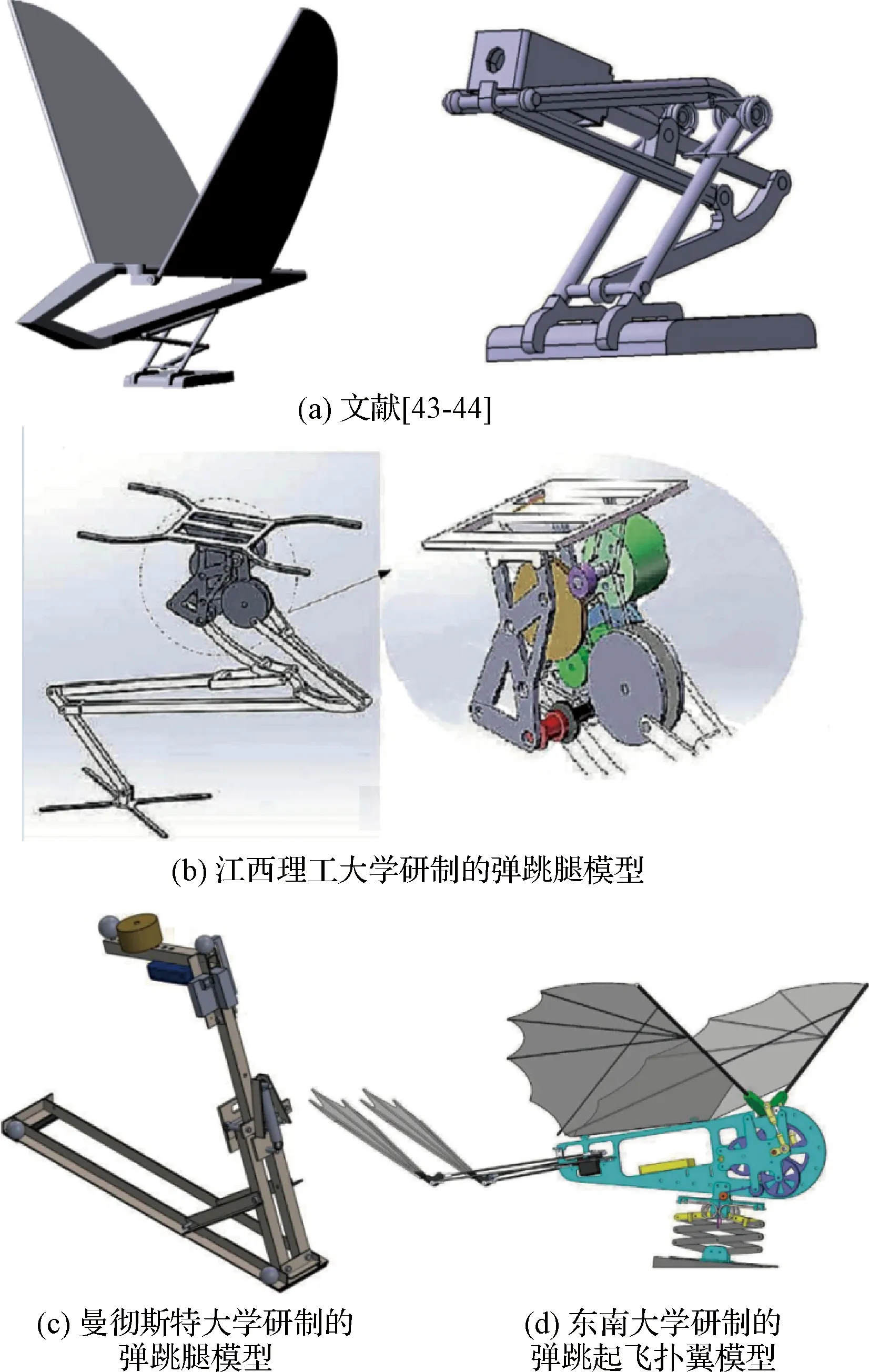
图5 弹跳起降模型Fig.5 The model of jumping take-off and landing
由于诸多弹跳机器人所表现出的超强弹跳性能[48-50],使得弹跳依旧为仿鸟扑翼飞行器自主起降问题的重要解决途径。目前,弹跳机器人在设计、制作等方面已经积累了大量经验[51-52],弹跳滑翔机器人[53-56]实现了空中姿态调整和减小落地冲击,仿蝗虫弹跳机器人[57-58]初步实现了弹跳-扑翼复合运动,这些部分成果均可直接应用于仿鸟扑翼飞行器弹跳起降技术。值得注意的是,应用于仿鸟扑翼飞行器后,弹跳仅是作为辅助飞行器自主起降的一个功能,而飞行才是飞行器的主要任务,因此这就要求弹跳机构在满足起降性能的基础上,其重量仍不影响飞行器的正常飞行,然而就目前来看,这已成为制约该技术发展的最大障碍,亟需攻克。
2.3 滑跑起降技术
自然界中鸟类奔跑起飞比较常见,其通过快速奔跑并扑动翅膀来达到起飞条件。应用于仿鸟扑翼飞行器上,可在机腹安装轮式起落架,将机身支撑起最优的起飞角度,起飞时,扑动机翼推动机身在地面滑跑,当达到起飞速度时,完成起飞。起飞后也可收起起落架以减小阻力,降落时重新放下。
美国加利福尼亚大学Peterson等[59]利用起落架使仿鸟扑翼飞行器BOLT成功滑跑起飞,如图6(a)所示,飞行器翼展28 cm,扑动频率18 Hz,起飞重量11.4 g,当滑跑速度达到2.5 m/s时可在光滑的木板上起飞,滑跑距离为2 m。韩国国防发展局Jong-Heon等[60]对加装了起落架的仿鸟扑翼飞行器进行了性能测试,如图6(b)所示,该飞行器翼展50 cm,扑动频率12.25 Hz,起飞重量210 g,当机翼扑动推动机身在光滑地面上滑跑速度达到7.23 m/s时,飞行器成功起飞,滑跑距离为11.22 m。
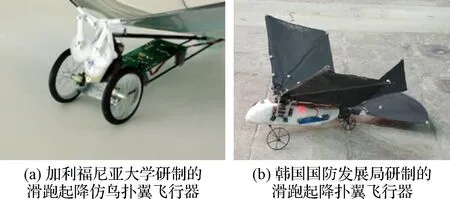
图6 滑跑起降仿鸟扑翼飞行器Fig.6 Taxiing take-off and landing BFAV
仿鸟扑翼飞行器滑跑起飞时,通过机翼的扑动同时产生升力和推力,从静止加速到起飞速度需要一定的滑跑距离,这对起飞场地平整程度提出了较高要求,因此这也限制了该技术的应用。而在扑动滑行过程中,机翼周期性上下扑动会造成机身振动,这对前进时机轮指向稳定性产生不利影响[60],需要克服。
2.4 滑翔起降技术
仿照鸟类滑翔起降,为仿鸟扑翼飞行器加装栖停装置,首次起飞时手抛起飞,当需要降落时,使其可以像鸟儿一样栖停在屋顶、电线杆或者树枝等较高的地方,当再次起飞时,只需从栖停地滑落,进入滑翔模式获得起飞速度完成起飞。文献[61]以此起降技术为基础进行了相关设计,如图7所示,该栖停装置为一对仿生机械鸟爪,通过视觉导航单元和运协调处理器共同作用来完成仿鸟扑翼飞行器的起降动作。

图7 扑翼仿生起落架系统Fig.7 Bionic undercarriage system of BFAV
滑翔起降技术更为仿生,然而其技术要求也更高,在该技术中,如何完成精准降落成为最重要的问题。为满足精准降落,仿鸟扑翼飞行器首先必须拥有近乎悬停的能力[61];其次,不但需要研究轻量化的栖停装置,更需要研究智能环境感知和控制系统,如栖停过程中障碍物及栖停位置的精确识别、栖停装置的收放、栖停过程抗扰动的稳定控制、运动模式之间的转换控制等。而就目前技术的发展来看,还远远达不到实际使用的要求,仍需要相关技术的突破才有可能实现真正意义的仿生栖停和滑翔起降[62-65]。
综上所述,结合鸟类起降方式和目前仿鸟扑翼飞行器自主起降研究成果,仿鸟扑翼飞行器自主起降可分为四大类五个技术,如图8所示。针对不同的技术,研究者们已经开展了部分研究,但各技术在实际应用中仍存在诸多关键技术需要突破。

图8 仿鸟扑翼飞行器自主起降技术总结Fig.8 Summary of autonomous take-off and landing technology of BFAV
针对上述总结的方案,在不同的技术背景之下,各技术方案的优劣程度也不同,但就仿鸟扑翼飞行器自主起降这一问题来看,无论对于何种技术方案,关注的性能、指标却是大致相同的。
就目前技术背景下,从方案的结构重量、功耗、控制系统难易程度、可靠性、仿生程度等评判指标出发,混合布局垂直起降技术或是最优方案,弹跳起降技术具有较大的发展潜力,滑跑起降技术较差,而尾座式垂直起降技术及滑翔起降技术仍面临诸多挑战。
3 总结与展望
近年来,仿鸟扑翼飞行器已经从概念设计逐步走向了实用化研究,自主起降功能缺失成为横亘在其实用化道路上的障碍,这也是开始重视仿鸟扑翼飞行器自主起降技术研究的重要原因。就当前的研究来看,其才刚刚起步,仍有很长的路要走。
仿鸟扑翼飞行器是目前微型飞行器发展的一种颠覆性的技术和热点方向,在未来的研究中,一个自主程度更高、载荷能力更强、适应范围更广、接近甚至超过自然飞行生物的智能飞行器是研究人员的目标。针对仿鸟扑翼飞行器自主起降发展问题,本文从下述四个方面提供了一些研究思路。
1)轻便高效是仿鸟扑翼飞行器自主起降设计的基本要求。仿鸟扑翼飞行器的根本目的在于执行特定任务,引入自主起降功能模块势必会减小飞行器的有效载荷、增加飞行器的功耗。因此对自然界飞行生物起降方式研究仍是十分有必要的,如针对鸟类灵活且强有力的后肢进行深入研究,为仿鸟扑翼飞行器自主起降设计提供理论依据和设计思路。同时还需引入纳米制造技术和人工肌肉等智能材料技术,为发展出微小、轻量、高效的起降装置做支撑。将起降装置进行模块化设计,针对不同的任务可进行拆装,从而使其应用更加灵活。
2)多模态运动为仿鸟扑翼飞行器自主起降设计的根本。发展仿鸟扑翼飞行器自主起降技术的根本目的就是为了增加仿鸟扑翼飞行器的环境适应性,因此可结合其他机器人领域内的相关设计经验,探索仿鸟扑翼飞行器跑、跳、起飞、着陆和栖停等运动模式之间的过渡转换及控制方法。
3)高度仿生仍是仿鸟扑翼飞行器自主起降设计的重点。仿鸟扑翼飞行器仿生的飞行方式及外观使其在任务中更加隐蔽,从而发挥出更大的作用,因此设计的自主起降装置无论是从动作还是外形都应仿生地与飞行器系统融合。
4)高度智能为仿鸟扑翼飞行器自主起降设计的终极目标。目前仿鸟扑翼飞行器只能进行一些简单环境的应用,因此针对未来复杂任务环境,还需研究智能识别、自主避障、智能路径规划等人工智能技术在仿鸟扑翼飞行器中的应用,使其具备环境感知及应变能力,从而真正走向实用。
自主起降作为仿鸟扑翼飞行器的一个关键功能,无论采取何种方式,其都必须无缝地融合到整个飞行器系统中,使仿鸟扑翼飞行器无论从外形还是功能上都高度仿生化。未来拥有环境感知能力和多模态运动方式的高智能仿鸟扑翼飞行器将在国防军事和民用领域大放异彩。
猜你喜欢
学苑创造·A版(2024年5期)2024-06-10 21:55:57
学与玩(2022年9期)2022-10-31 02:54:08
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年7期)2021-10-13 08:12:20
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
文苑(2020年12期)2020-04-13 00:54:14
小太阳画报(2019年1期)2019-06-11 10:29:48
电子制作(2019年9期)2019-05-30 09:41:48
小学生必读(低年级版)(2017年5期)2017-08-12 03:47:07
小学时代(2017年16期)2017-06-19 19:33:19