基于人机协同的车道保持辅助系统研究进展
2021-03-29 03:11秦增科
工程科学学报 2021年3期
秦增科,郭 烈,马 跃,岳 明
大连理工大学汽车工程学院,大连 116024
道路交通安全问题已经引起人们的普遍关注,而人为失误是交通事故的主要成因[1]. 美国国家公路交通安全管理局统计结果表明,约20%的交通事故是车辆偏离本车道造成的[2]. 全自动驾驶作为智能汽车的最终阶段,能够有效地减少交通事故. 但全自动驾驶无论是技术还是法规都不成熟[3]. 而作为高级辅助驾驶系统重要成分之一的车道保持辅助系统,可以有效地防止疲劳驾驶或者驾驶员注意力不集中造成的车辆偏离本车道.
通过车载传感器车道偏离预警系统能够检测出本车相对于车道边界的横向距离,在决策模型判断满足警告条件的情况下,将通过多种感官系统(视觉、听觉或触觉)警告来警示驾驶员,辅助驾驶员减少或避免车道偏离造成的安全事故[4]. 车道偏离预警系统是车道保持辅助系统的基础[5],能够进一步对车辆进行主动控制,防止车辆意外偏离本车道. 传统的车道保持辅助控制系统多将驾驶员输入作为干扰[6],并利用控制算法建立车路模型. 由于这种控制系统没能更好的适应驾驶员,驾驶员容易与系统发生冲突,降低驾驶员对系统的接受程度. Flemisch等[7]认为骑手可以通过缰绳控制马匹,而马匹也可以独自驰骋,这种协作控制的特征同驾驶员与自动控制器之间的合作方式类似. 为了兼顾驾驶员和自动控制器各自的优势,提出了人机共驾的概念. 驾驶员与自动控制器之间有明确的开关切换控制是实现人机共驾的方式之一. 目前与驾驶权切换相关的部分原理仍然存在争议,另外由于控制冗余的存在,人机冲突及驾驶员负荷增加等问题并没有被完全解决[8]. 由于人机切换存在上述问题,实现人机共驾的另一种方式是人机动态协同控制,这种控制方式得到越来越多的关注. 基于人机动态协同控制的车道保持辅助系统利用车辆状态、驾驶员状态及外部环境等信息,平滑地改变驾驶员与自动控制器之间的控制权,将车辆保持在本车道的同时符合驾驶员意图,从而保证行驶车辆的安全性与驾驶员舒适性.
基于人机动态协同控制的车道保持辅助系统作为具有科研前景的智能汽车技术,目前存在以下研究难点:(1)车道偏离预警系统需要为控制系统提供警告信息,决策模型作为车道偏离预警系统的关键部分,目前在降低系统漏警率和误警率方面存在局限性. (2)目前驾驶员和自动控制器之间的驾驶权动态分配方式多种多样,驾驶权动态分配方式值得深入研究. (3)现有的车道保持辅助系统的测试评估标准不能完整评估人-车-路耦合的动态协同控制型系统,选取合适且完整的评估指标是建立相关测试标准的难点. 因此,围绕上述难点,对基于人机动态协同控制的车道保持辅助系统展开研究具有现实意义.
本文以基于人机动态协同控制的车道保持辅助系统为中心展开综述,对车道偏离决策模型、驾驶权动态分配方式及性能评估指标等内容进行了分析,并指出其未来研究方向,为我国智能汽车领域的研究与发展提供理论支撑.
1 车道偏离决策模型
决策模型根据收集到的外部环境、驾驶员及车辆信息,判断是否应进行告警,因此在车道偏离预警系统中有重要作用[9]. 根据ISO 17361[10]中的规定:当满足警告条件时,车道偏离预警系统应警告驾驶员;系统应将虚假警报减至最少;系统最晚的警告线位于乘用车车道边界外0.3 m,卡车和公共汽车车道边界外1 m.
预警时间不合理,会降低系统被接受与信任程度,因此设计决策模型时需要确定合理的预警时间. 如果预警时间大于合理时间,驾驶员会被系统干扰;如果预警时间小于合理时间,留给驾驶员操作的时间会被缩短,导致驾驶员不必要的恐慌.
如果预警系统不能正确识别驾驶员的意图或行为习惯,容易导致较高的虚假警报率. 虚假警报会对驾驶员的正常驾驶产生干扰,减少驾驶员对系统的接受程度. 值得注意的是,设计者不能只追求更少的虚假报警,而放宽预警阈值,造成正确的预警信号被遗漏.
1.1 经典的车道偏离决策模型
学者们围绕车辆偏离决策模型展开了很多研究,现存在5种经典的车道偏离决策模型:基于车辆横越车道线的时间(Time to lane crossing,TLC)[11-13]、基于车辆在车道中的当前位置(Car’s current position, CCP)[14-15]、基于将来偏离量的不同(Future offset difference, FOD)[16-17]、基于知识的道路场景感知(Knowledge-based interpretation of road scenes, KBIRS)[18-19]和虚拟停车振动带的预警算法(Virtual rumble strip, VRBS)[20-21].
基于TLC的决策模型由Godthelp等[22]提出,该模型需要对车辆的运动模型进行假设,预测本车的行驶轨迹,得到本车由当前位置到车轮与车道边缘接触所用的时间. 基于CCP的决策模型在车道偏离模型中的复杂程度最低[23],该决策模型计算车辆与检测到的车道之间的相对距离,并决定是否对驾驶员发出警告. 基于FOD的决策方法设置了一条位置可变化的虚拟车道线,用于考虑驾驶员的个人驾驶习惯[24]. 如果车辆偏离了设定的虚拟车道,则算法开启警告模式. KBIRS是一种理论决策模型,当系统检测到车辆将要偏离本车道时,行驶环境场景的感知产生大幅度变化,这种情况会启动车道偏离预警系统. 在欧美国家道路普遍应用的路边停车振动带(Roadside rumble strips, RRS)的基础上[25],研究人员提出了VRBS算法. 该算法设定了横向距离,当车辆目前所在的位置超出预定的距离时,系统将开启预警机制.
通过上述5种车道偏离决策模型的比较,表1总结了各种车道偏离决策模型的优缺点.
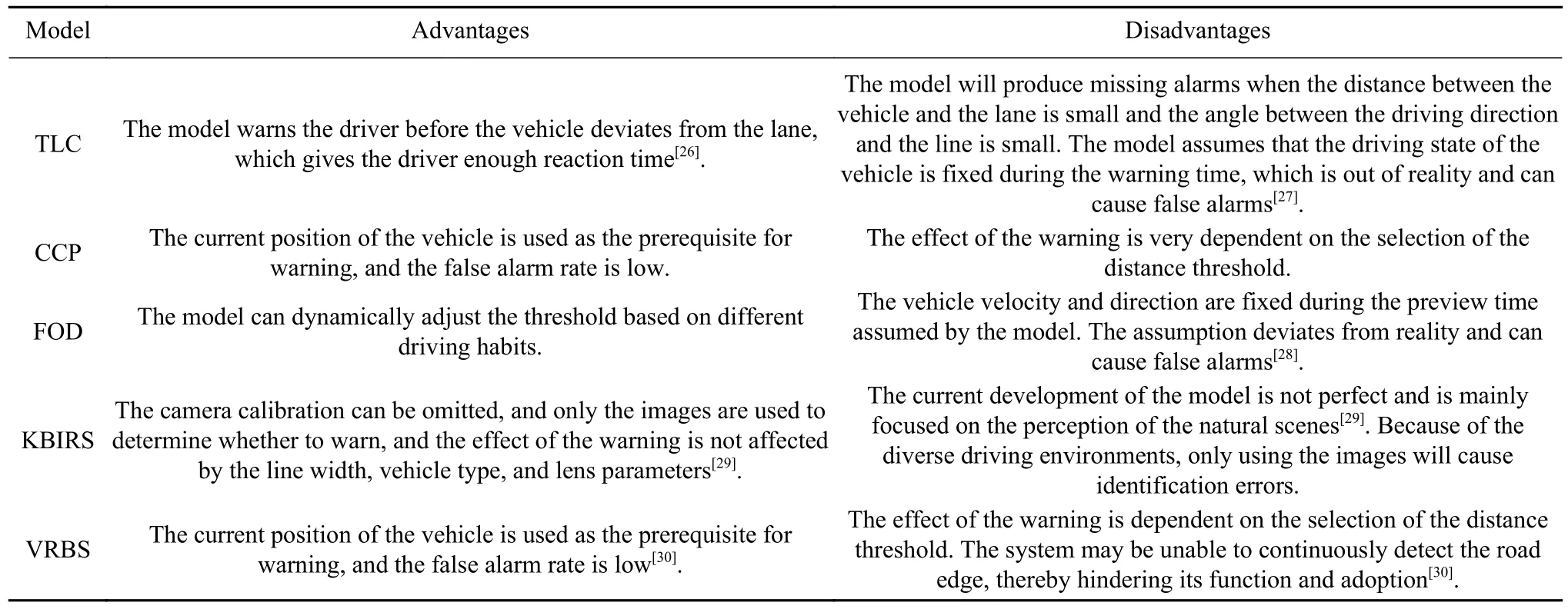
表1 车道偏离决策模型的对比Table 1 Comparison of lane-departure decision models
1.2 改进的车道偏离决策模型
由于上述单一的决策模型具有各自的局限性,学者提出了结合多种模型优点的改进方案. 吴乙万[31]提出了基于动态TLC阈值的车道偏离决策模型,该模型可以主动调整系统发出警告的时间,防止系统过早或过晚警告,从而提高驾驶员对系统的信任程度. Angkititrakul等[32]将道路形状与驾驶员操作信息作为模糊规则的设计基础,通过模糊规则动态调节虚拟道路的宽度,再联合TLC与虚拟道路边界,最终达到减小误警率的目的. 由于TLC决策模型有局限性,郭烈等[33]提出了联合最晚预警边界与安全行驶区域的车道偏离决策模型,该模型在TLC决策模型的基础上加入一个比车道边界更宽的最晚预警边界. 即使TLC决策模型计算出的偏离时间达不到开启警告的阈值,只要车辆的左前轮或右前轮接触到最晚预警边界,系统就会启动警告以降低漏警率.
由于驾驶员之间的驾驶行为存在差异,车道偏离决策模型需要允许驾驶员根据个人偏好、当前驾驶状态以及外部驾驶条件来进行调整[34]. 丁洁云[35]设计了基于动态期望驾驶区间的决策模型,能够根据驾驶员驾驶时偏离车道的程度不同,动态调整决策模型的阈值. 为降低系统的误警率,Wang等[36]首先通过结合高斯混合模型和隐马尔可夫模型,建立了针对车道偏离和车道保持行为的个性化驾驶员模型. 其次,基于该驾驶员模型,开发了一种结合驾驶员行为与车辆偏离状况的车道偏离警告策略,该方法可以降低虚假警报率.Albousefi等[37]在驾驶模拟器上利用非线性二进制支持向量机模型来估测驾驶员是否无意识驶离本车道. 实验证明横向位置和横向速度作为模型输入变量效果最好,能够明显降低系统的误警次数,需要车辆具备运行支持向量机模型的计算能力.
综上所述,车道偏离决策模型作为车道保持辅助控制系统的基础,应保证系统在恰当的时刻警告驾驶员,既要避免对驾驶员造成干扰,又不造成驾驶员的惊慌. 目前横越车道线的时间被各预警模型广泛采用[38],但这种模型的预警机制在降低系统漏警率和误警率方面有较多待改进之处.随着车道偏离决策模型的不断发展,进一步降低车道偏离预警系统的漏警率和误警率仍是决策模型的重要研究方向. 如何设计更为完善的驾驶员认知机制,以设计符合驾驶员意图的车道保持辅助系统,是改进决策模型过程中值得关注的问题.考虑到驾驶员之间复杂的差异,根据驾驶员特性设计不同的决策模型,进行个性化预警是值得关注的研究方向.
2 驾驶权动态分配方式
驾驶员和控制器之间的驾驶权动态分配值得深入研究,以更好的完成车道保持任务并提高驾驶员的乘坐舒适性. 基于人机动态协同控制的车道保持辅助系统,驾驶员与控制器的驾驶权动态分配方式可以分为3类:加权求和、带权重系数的加权求和与优化问题中的权重分配.
2.1 加权求和
加权求和的驾驶权动态分配方式是将驾驶员与控制器的输入相加,其协同控制结构如图1所示. 图中 δd为驾驶员目标转角;δa为控制器目标转角;δ为实际转角;Td为驾驶员输入力矩;Ta为控制系统输入力矩;rd为驾驶员目标路径;ra为控制器目标路径.

图1 加权求和型动态协同控制系统框图Fig.1 Block diagram of the weighted sum dynamic cooperative control system
Mulder等[39]设置了2个控制系统,一个是驾驶员,另一个是辅助控制系统. 驾驶员与辅助控制系统各自有预期路径. 而辅助控制系统的扭矩为将实际的方向盘转角移至控制器目标转向角的扭矩. Saito等[40]提出,当老年驾驶员的方向盘角度与专家驾驶员模型提供的参考方向盘角度不对应时,控制系统将转向引导扭矩作为来自方向盘的触觉扭矩提供给驾驶员,以指示驾驶员在沿着期望路径行驶时应施加的转向方向. 在此基础上,Inoue等[41]在控制系统中增加了直接偏航力矩控制,以降低扭矩干扰的程度.
与无辅助系统相比,加权求和的共驾系统可以降低横向偏差,显示出良好的车道保持性能[42].但这种协作方式仍有改进之处. 加权求和的控制方案只考虑方向盘转角偏差,而没有充分考虑车辆的其他状态以及驾驶员状态. 当控制器的轨迹规划路径与驾驶员的预期路径不同时,控制器的力矩容易与驾驶员力矩方向相反,引起人机冲突.
2.2 带权重系数的加权求和
带权重系数的加权求和,可以利用权重系数,灵活地考虑车辆、驾驶员及行驶环境等多种因素,从而提高车辆行驶安全性,保证良好的人机合作性能. 根据权重系数的来源进行划分,该驾驶权分配方式可以分为考虑车辆信息和考虑驾驶员特性信息的两种方式.
(1)考虑车辆信息.
Sentouh等[43]提出,驾驶员力矩与控制器的权重系数由高斯分布函数描述,其大小由车辆横向偏离误差决定. 车辆距车道的中心线越远,权重系数越小,则转向控制器提供辅助力矩越大. 在Soualmi等[44]与 Anderson等[45]的研究中,前轮的侧滑角被用于进行威胁评估,驾驶员与控制器构成的主动安全系统框架如图2所示,图中K为权重系数. Falcone等[46]的研究中表明,限制轮胎滑移角来避免轮胎力曲线的强烈的非线性区域可以显著增强车辆的稳定性和性能. 较低的威胁程度会使得驾驶员输入为主导,随着威胁程度的增加,控制权可以从驾驶员到控制器进行平稳过渡.Iwano等[47]设计的系统中,权重系数是定值. 相对没有转向辅助的情况,具有转向辅助的系统有效地减小了车辆的相对横向位移. 但当加权系数的值为1时,转向辅助力矩的方向会多次与驾驶员转向转矩方向相反,导致驾驶员与转向辅助之间存在冲突. 作者认为权重系数取0.5时可以综合考虑车辆稳定性和操纵质量.
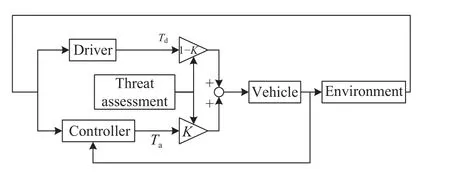
图2 考虑车辆信息的动态协同控制系统框图Fig.2 Block diagram of dynamic cooperative control system considering vehicle information
(2)考虑驾驶员特性信息.
驾驶员的特性信息对于减轻驾驶员的工作量、改善车辆主动安全系统的可靠性和舒适性是至关重要的[48-49]. 因此,更多的研究人员将驾驶员特性信息应用在动态协同控制系统的构建中.Benloucif等[50]在轨迹规划级别考虑驾驶员的转向扭矩,以便以更适合驾驶员意图的方式调整系统的期望轨迹. 通过这样做,系统可以帮助驾驶员以更少的扭矩在车道内转向. Nguyen等[51]认为辅助水平应设计为在驾驶员过负荷和欠负荷情况下减轻驾驶员的负担,因此权重系数曲线被设计成随驾驶员活动变量变化的钟形函数. 驾驶员扭矩或驾驶员状态保持较小时,意味着驾驶员活动不明显,因此需要高水平的辅助. 而在驾驶员高负荷时,控制系统也需要通过较高的辅助帮助驾驶员减轻驾驶负担. Sentouh等[52]设计的系统中,权重系数用以促进两个控制器的协作. 第一个控制器的目标是使车道跟随路径的误差最小,将车辆保持在车道中心. 第二个控制器的目标是将控制器提供的扭矩与驾驶员的扭矩差最小化,从而使驾驶员更轻松,更省力. 作者设计的系统能够实时监控驾驶员疲劳和分心情况,将驾驶员状态量化,并作为驾驶员转矩与控制器转矩之间的分配系数,驾驶员与控制器的协同控制架构如图3所示,图中Ta1为自动车道保持控制器的力矩;Ta2为驾驶助力控制器的力矩. 次要驾驶任务的实验结果表明,系统权限级别的自动调整有助于提高车辆行驶性能,且驾驶舒适性显著改善.
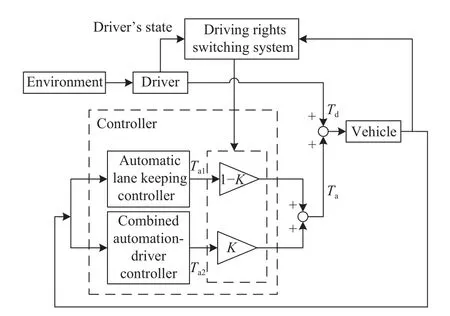
图3 考虑驾驶员特性信息的动态协同控制系统框图Fig.3 Block diagram of the dynamic cooperative control system considering driver characteristic information
Jiang和Astolfi[53]提出的系统中,利用两个车辆与道路中心的偏离距离作为阈值,划分出了3个危险等级,表明驾驶员的行为的危险程度. 根据危险等级的不同选取对应的共驾系数,通过开发的控制器与驾驶员协同驾驶. 实验证明即使驾驶员不能正确驾驶,车辆也可保持在给定的车道内行驶. 高振刚等[54]的研究中,当触发车道偏离预警时,如果驾驶员力矩超出阈值,系统判定驾驶员为误操作. 驾驶员力矩和预瞄处车辆横向偏差被用于设计模糊规则曲面,从而进一步确定共驾系数. 如果系统检测到驾驶员力矩小于预定值,则系统判定驾驶员疲劳,并在控制过程中将辅助控制器置于主导地位. Ma等[55]通过纳什博弈策略对驾驶员-自动化交互式路径跟随任务进行建模,并使用横向位移的权限权重来平衡驾驶员和自动化的控制目标. Li等[56]设计了带权重系数加权求和来平衡驾驶员的输入和控制器的期望输入,并提出了一个预测模型来捕获驾驶员对系统的适应和信任.
2.3 优化问题中的权重分配
上述的2种加权求和动态驾驶权重分配方案都将驾驶员和控制器视为相对独立的智能体,路径的规划方案相对独立,系统的输出来自于驾驶员与控制器各自输出的结合. 然而驾驶员与控制器独立决策之后将两者的输出相加,会造成驾驶员对车辆的反馈感受不佳[57]. 而与之不同的思路是将驾驶员输入直接加入控制系统中,经优化后直接获得最终的控制量.
Gray等[58]设计了一种新颖的主动安全系统,以防止人为干预导致意外的道路偏离. 与其单独解决威胁评估,决策和干预问题,作者将它们重新表述为组合的优化问题. 该问题利用非线性车辆动力学与驾驶员模型闭环控制进行优化,保证驾驶员安全所需的转向和制动行为. 所提出的控制器始终处于活动状态,从而避免了开关逻辑的设计或偏离边界的调整. 另外,由于所提出的控制器被设计成仅施加避免约束违背所必需的校正控制动作,所以安全应用的侵入性最小. 文中详细介绍了提出的框架,并通过乘用车上的实验结果成功展示了其有效性. Zafeiropoulos和Tsiotras[59]已经使用和比较了两种车道保持系统设计方法. 一种控制系统基于加权求和的输出反馈调节,由于模型预测控制(Model predictive control, MPC)可以有效进行路径跟踪[60],另一种则是基于MPC模型.Beal和Gerdes[61]已经将MPC模型应用于车辆稳定性控制. 参照实验结果可知,将驾驶员模型包含在系统循环中时,车辆的车道保持效果是最好的.Erlien等[62]提出的方法不是将驾驶员和控制器的命令混合在一起,而是将驾驶员的转向命令直接纳入问题表述中. 这样,匹配驾驶员当前的转向命令就成为一个控制目标,该目标是根据避免碰撞和车辆稳定性的其他目标进行评估的. 控制器一直居于控制状态,但在安全的状况下偏向于完全匹配驾驶员的命令.

表2 驾驶权动态分配方式特点比较Table 2 Comparison of characteristics of driving rights dynamic-allocation methods
综上所述,本部分介绍了驾驶员与控制器的3种驾驶权动态分配方式,表2总结了这几种协同方式的特点. 如何在保证良好的路径跟踪性能与车辆稳定性的前提下,减少人机冲突,提升驾驶员乘坐舒适性,是目前的研究热点. 目前动态协同控制系统中对驾驶员特性的检测多基于车辆本身信息,但车辆信息的检测精度低. 如何将驾驶员生理信息、视觉信息与车辆信息整合,提升驾驶员特性的检测准确性进而应用于动态协同控制,是控制系统中值得关注的问题. 目前大部分的动态协同控制不能满足系统对实时性的要求,而随着第5代移动通信(5G)的快速发展,5G通信技术可以应用于低时延、高移动性的交通场景中[63]. 如何保证动态协同控制系统的实时性,是将研究成果应用于实践的重要保障.
3 性能评估指标
车道保持辅助系统的性能评估能够衡量所设计系统的专业程度,对系统的设计和改进具有重要意义. 基于人机动态协同控制的车道保持辅助系统,驾驶员与控制器共同控制车辆完成驾驶任务,形成了驾驶员-车辆-环境-任务强耦合的系统. 该系统与传统的车道保持辅助系统相比,性能评估中的测试环境、测试路线及车辆状况基本一致. 由于基于人机动态协同控制的车道保持辅助系统中更多地考虑了人的因素,需要相比传统系统更加复杂与完善的评价指标,从而保证对系统性能进行全面评估.
传统的车道保持辅助系统需要符合车辆操纵稳定性以及路径跟踪的设计要求. ISO 11270中规定了车道保持辅助系统性能评估的标准,横向加速度、车速、横向偏移速度和横向偏移距离被用于评估车辆操纵稳定性以及系统执行路径跟踪的能力. Marino等[64]设计了基于视觉的嵌套比例积分微分车道保持控制,并进行了实验测试,利用横摆角速度评估车辆在曲率不确定的道路上的稳定性.
基于人机动态协同控制的车道保持辅助系统除了需要满足车辆操纵稳定性以及路径跟踪要求之外,有的系统被期望减少驾驶员的控制活动.Mulder等[39]的研究中,驾驶员需要掌控驾驶模拟器的转向盘,将车辆保持在虚拟车道内. 通过对比触觉共享控制与手动控制实验中采集的方向盘反转率与方向盘角度标准偏差,证明了触觉共享控制比手动控制需要更少的控制活动. Benloucif等[65]在动态驾驶模拟器的基础上设计了自适应车道保持辅助系统. 驾驶员的转向力度被计算为感兴趣的时间窗口内驾驶员扭矩平方的积分,该度量标准已用于评估驾驶员控制其车辆所花费的总力.Li等[56]建立一种间接共享控制的车道保持方法,通过分析仿真结果中的方向盘转角可以看出,与手动驾驶相比,间接共享控制可以显著减少驾驶员的转向控制工作量. 如果驾驶员可以很好地适应控制器,则可以进一步减少其控制工作量,因为驾驶员将利用控制器的优势来承担其部分路径跟踪任务. 还有车道保持辅助系统被期望降低人机冲突. Inoue等[41]设计的车道保持系统将触觉转向引导转矩与直接偏航力矩控制结合在一起,通过对比实车实验结果中的辅助力矩与驾驶员力矩,可以证明该系统相比常规转向辅助系统降低了辅助扭矩的干扰程度. 高振刚等[54]在MPC的基础上建立了辅助控制系统,对比硬件在环试验结果中的辅助力矩与驾驶员力矩,可以发现人机动态协同控制比无协同控制产生的对驾驶员的干扰明显减少. Sentouh等[66]为了避免在避障期间的复杂冲突情况,提出并实现了用于控制权转移的决策算法,并将驾驶员扭矩和辅助扭矩的乘积用作人机冲突的性能评估指标.
上述车道保持辅助系统的性能评估指标均为客观标准. 虽然目前的研究领域还没有对车道保持辅助系统固定的主观评估标准,但为了完善评估车道保持辅助系统,还应对系统进行主观评估.Benloucif等[65]提出,主观评价要求参与者根据他们的舒适感,安全性,控制质量和工作量来评估系统,并以0(最差)至100(最佳)的等级进行打分.
通过分析传统与基于人机动态协同控制的车道保持辅助系统,表3总结了系统的性能评估方式、评估指标及评估内容.
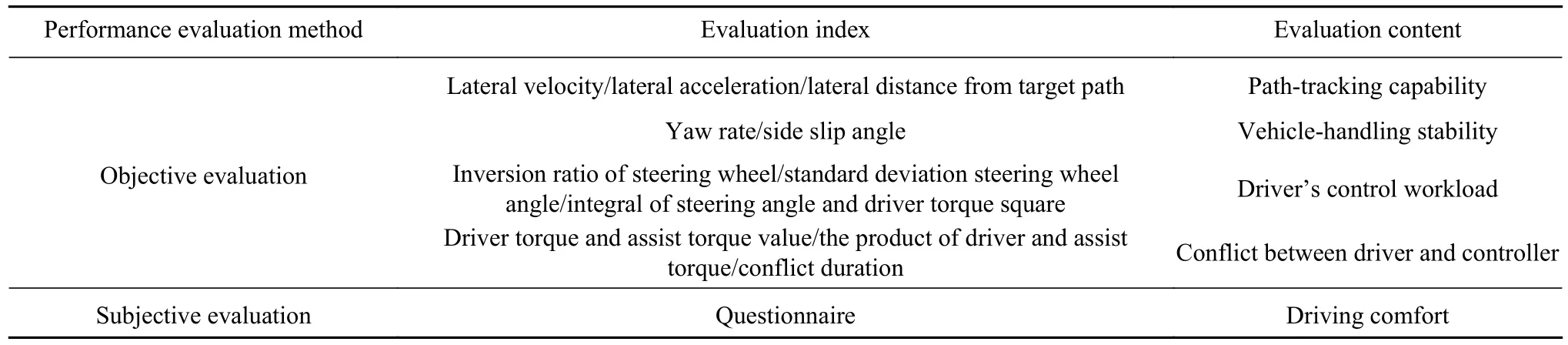
表3 车道保持辅助系统的性能评估Table 3 Performance evaluation of lane-keeping assist system
现有车道保持辅助系统的性能评估测试,尤其是性能评估指标尚未成熟. 2020年4月,工信部发布了《2020年智能网联汽车标准化工作要点》,要求加快完善智能网联汽车标准体系建设,形成可以支持驾驶辅助及低等级自动驾驶的智能网联汽车标准体系. 实车测试时会出现测试时间长、测试场景固定以及资金消耗量高等问题,制定更为完善的车道保持辅助系统的测试评估体系和国家标准,将对我国智能汽车的发展具有重要意义.
4 研究展望
基于人机动态协同控制的车道保持辅助系统及其测试评估已经得到了持续发展,但不可否认的是它们仍存在待改进之处,研究展望包含如下几个方面:
(1)在车道偏离决策模型方面,可以依据驾驶员状态的差异制定相应的决策模型. 当驾驶员困倦或分心时,决策模型可以向驾驶员提供更早或更响亮的警报;面对复杂的驾驶员群体,除了设计自适应调节的决策模型,还可以允许驾驶员根据自己的喜好和外部驾驶环境手动调整决策模型中预设的参数;驾驶员行为模型可应用于车道偏离决策,该模型识别驾驶员是否有意识的操纵车辆,决策模型根据上述的判断选择合适的警报时机.
(2)在驾驶权动态分配方面,可以进一步探索驾驶员与控制器之间的驾驶权动态分配方式,利用更加智能的优化算法或控制模型,提升车辆的路径跟踪能力与操纵稳定性;控制系统的设计需要考虑驾驶员本身的状态信息,可以整合驾驶员状态信息、环境信息与车辆信息,提取有效的信息作为控制器的输入,动态调整控制力矩或转角,降低动态协同控制时驾驶员与控制器的冲突.
(3)驾驶员意图及驾驶员特性(如年龄、性别、驾驶风格、驾驶状态、驾驶技能)对车道偏离决策及控制层面的设计有重要意义. 结合人因工程学、脑科学、心理学等领域的研究,揭示驾驶员复杂操纵背后的认知机制,为建立与驾驶员相关的模型,继而将其应用于决策和控制层面提供理论指导;驾驶员的驾驶风格及驾驶技能会随时间的推移而改变,利用深度学习算法建立相应的模型,实时识别驾驶风格及驾驶熟练程度,利用5G技术线上更新模型权重,提高系统的舒适性与个性化.
(4)由于现有的车道保持辅助系统的性能评估不能完全适用于基于人机动态协同控制的车道保持辅助系统,可以在评价体系中加入与降低人机冲突及减少驾驶员控制量相关的评估指标;现有的基于人机动态协同控制的车道保持辅助系统中,主观评价的方法差异较大,应该广泛调研驾驶员在系统的辅助下完成实验后的主观感受,制定科学完善的主观评估体系;针对实车测试中由测试场地限制引发的一系列问题,提取车辆及驾驶环境的特征,建立基于数字孪生的测试平台,在虚拟场景中快速而准确的完成性能评估.
5 总结
对基于人机动态协同控制的车道保持辅助系统中的车道偏离决策、控制及性能评估指标等方面的最新研究和科研成果进行了综述. 围绕基于人机动态协同控制的车道保持辅助系统,从车道偏离决策模型到驾驶权动态分配方式,再到该系统的性能评估指标,按照时间顺序展开论述. 在车道偏离决策模型部分,通过列举不同的决策模型,讨论了决策模型的设计要求,分析目前决策模型的优缺点,总结了决策模型的几种发展方向. 在驾驶权动态分配方式部分,将驾驶员与控制器的驾驶权动态分配方式分为3类,介绍了控制模型中用到的算法,对比了驾驶权动态分配方式之间的优缺点,整理了该部分的发展方向. 在性能评估部分,重点列举了性能评估参数,总结了性能评估的待改进之处. 对于基于人机动态协同控制的车道保持辅助系统,未来的研究将更多地考虑驾驶员因素,实时警报及进行主动控制干预,利用数字孪生等先进技术建立完善的测试及评估体系.
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
南都周刊(2021年3期)2021-04-22
中国交通信息化(2020年11期)2021-01-14
海外星云(2016年7期)2016-12-01
太空探索(2016年5期)2016-07-12
公民与法治(2016年4期)2016-05-17