
基于激光导航的自动化立体库AGV叉车设计
2021-03-29 11:27吕俊燕郑明辉杨瑞青苏合新
黑龙江科学 2021年6期
吕俊燕,郑明辉,杨瑞青,苏合新
(1.山东华宇工学院,山东 德州 253034;2.智能制造装备设计工程技术研发中心,山东 德州 253034)
自动化立体仓库已成为现代物流仓储系统中的关键环节[1]。Automatic Guided Vehicle(简称AGV)能够在各种复杂的工况中准确、高效地完成搬运任务。在AGV叉车搬运过程中,导航系统起到至关重要的作用[2]。将激光导航技术与AGV叉车进行结合,应用于自动化立体库中,并对叉车进行路径规划,可使AGV在整个作业空间内实现自动导航功能。
1 激光导航技术
导航技术的主要作用是使物体在移动过程中按照预定的轨迹进行运动,时刻保持物体自身位置的准确性,并预先确定下一步的位置与姿态[3]。
激光导航技术与激光测距原理基本相同,都是通过测量系统从发出激光到接收激光所花费的时间,通过路程、时间和距离之间的数学关系,计算出系统本身与前方障碍物之间的距离[4]。不同点是,激光测距只需测量一次,而激光导航需要测量距离若干点的距离,以此来标定AGV小车的坐标位置。
2 AGV叉车的设计
2.1 自动化立体库模型
立体仓库模型的分布控制示意图如图1所示,自动化立体仓库主要分为入库区域、出库区域、货物存放区域、控制区域与AGV叉车停车充电区域。同时,货物存放区域采用的是五层的立体式货架,用于各类货物的存放或归类管理。每一区域对应不同货物安装不同的区域标识,能够保证AGV叉车在出库时准确地将货物取出,入库时能够将货物放置到对应的仓库中。

图1 自动化立体库模型
2.2 AGV叉车结构设计
AGV叉车主要实现在立体库、不合格品区、车间口之间的输送。根据本立体仓库的要求,AGV叉车举升高度为1 400 mm,采用液压举升方式,举升负载为1 000 kg。为了防止货物掉落,行走速度不高于60 m/min,速度可调,并且在转弯和靠站时均匀减速。行走定位精度为,停车定位精度为。为了与立体仓库货架之间的距离相适应,AGV叉车的总体尺寸为2 350×1 090×2 200 mm。整体结构图如图2所示。

图2 AGV叉车结构
2.3 人机界面
为了更加方便地控制与调度整个仓库的AGV叉车,对人机交互界面进行了更加科学、人性化的设计。
为了防止AGV叉车与其他障碍物发生碰撞,采用德国 SICK 的TIM310普通型激光扫描器,为AGV叉车提供可靠防护。TIM310扫描仪的扫描角度为270°,防护距离可达4 m,抗环境光为1 500 lx,极大地节约了维护成本,减少不必要的停机,如图3所示。

图3 TIM310普通型激光扫描器
2.4 激光导航系统
为了防止AGV叉车在作业空间中发生碰撞,可以根据自动化立体仓库的平面图,在AGV叉车的作业空间中安装激光导航的靶点,安装靶点的位置如下所示:
靶点位置一般安装在立柱、墙壁及设备上,如图4所示。

图4 靶点位置
靶点的平面分布最好采用不规则形式,这样可以形成地图的唯一性,如图5所示。
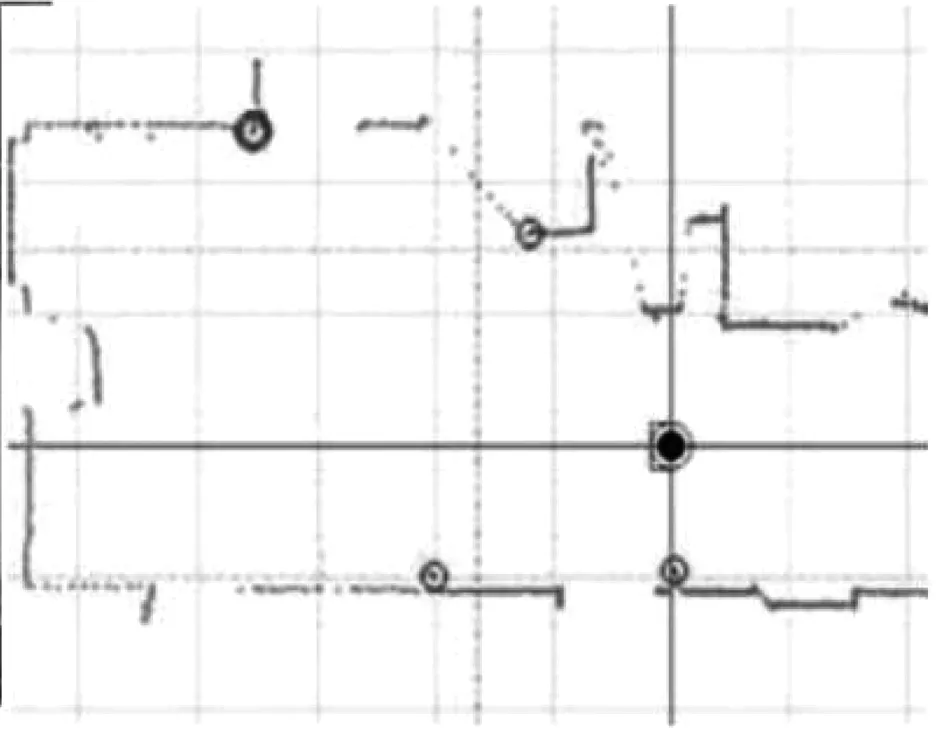
图5 靶点平面分布图
反光靶点的材料建议采用 DM983 级别的钻石反光膜,同时为了尽量减少空间的布置工作量,采用柱状的反光靶点。
2.5 自动充电系统
为了保证AGV有足够的续航能力,设计了自动充电系统,该系统在 AGV 处于待命状态时,可根据调度系统安排进行实时充电,从而保证AGV电量充足。充电流程图如图6所示。

图6 AGV自动充电系统
3 结语
将激光导航技术应用于AGV叉车系统,使得AGV叉车定位更加准确,运行路线更加顺畅,可以大大减少AGV叉车的停机次数,行驶路线范围更加广泛。同时配备自动充电系统,可以实时进行充电,从而保证AGV叉车电量永远处于充足状态,提高出库入库工作效率。将激光导航技术应用于立体仓库中,可以进一步促进企业实现智能物流工厂的目标,增强企业竞争力。
猜你喜欢
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
中国储运(2022年6期)2022-06-18
中国储运(2022年2期)2022-02-23
新视线·建筑与电力(2021年5期)2021-11-27
现代信息科技(2021年21期)2021-05-07
电子技术与软件工程(2021年20期)2021-03-10
数码设计(2020年15期)2020-12-08
商业会计(2017年24期)2017-09-17
决策与信息(2016年26期)2016-11-26
