
基于无线充电及自动导航避障的生态景区监测无人车系统
2021-03-28 04:43张凌云李清舟段睿珏薛裔男
电子元器件与信息技术 2021年12期
张凌云,李清舟,段睿珏,薛裔男
(北京林业大学工学院,北京 100091)
0 引言
目前,生态景区安防监测常采用布设传感器、人工巡查和定点视频监控等方式。但布设传感器和定点视频监控方式,布设密度大、数据采集不便;人工巡查方式需要的人工成本巨大,并且无法做到对巡查人员的监督;所以就如何利用无线充电技术实现24小时无间断工作,利用自动导航避障技术实现巡逻以及利用视频实时传输系统实行监察进行装置设计。
1 装置的硬件及系统的原理
1.1 硬件的构成
由树莓派、摄像头、蜂鸣器、红外反射传感器、超声波测距传感器、OpenMV4、Arduino和显示屏等构成。
1.2 工作原理
在景区内布置黑色轨迹,openMV4进行循迹导航及标志点识别,红外反射传感器实现避障,超声波测距传感器进行充电定位,同时采用摄像头实时对追踪的周围状况进行录制,树莓派作为载体并结合搭建的系统把摄像头录制的图像传至终端[1-2]。
1.2.1 导航循迹
OpenMV4是一个嵌入式的机器视觉模块。一个摄像头模块带有主控,可以用Python编程。用OpenMV4巡线,追踪黑色轨迹。借助的是线性回归,线性回归的意思就是找出一条直线,用最小二乘法,和曲线的吻合度最高,那个曲线就是道路的边缘。同时,需对图像进行灰度处理,即对像素点矩阵的操作,把图像进行二值化。二值化前要设置阈值,如在这个阈值下面的设置为白色,阈值上面的设置为黑色。可以对所有像素值做个线性回归。本身二值化后,像素点为0或为1,就对1的点做线性回归。在OpenMV4视觉模块中包含灰度化的算法函数。通过OpenMV4对色块的寻找以及其内部进行二值化处理后,就可以对黑线进行多段的标记,经过权重加和算法或者线性回归处理就可以计算出黑线的偏离值,注意这里所说的偏离值是指偏离图像中心线的角度。如此,无人车对于轨道的偏离程度便可通过OpenMV4实时显现。最后采用 URT 命令与 Arduino进行串口通信传值,将偏离数据传给无人车。
1.2.2 红外避障
红外发射二极管不断发射红外线,当放射出的红外线被物理反射时,被红外接收器接收,并输出数字量。小车前方得有三个红外传感器用以检测是否前方有障碍,如果发现障碍物,则通过标志位置1的方式进入避障子程序。在避障子程序中,为使小车沿障碍物行进,所以在前方设置三个红外传感器(如图1所示)使其覆盖角度达到小车正前方至正左侧90°范围内,使小车能够完全知悉其与障碍物的位置关系,并调整相应的运动方向,使小车与障碍物保持一定的距离。当下方传感器检测到轨迹后,标志位置零返回循迹程序。
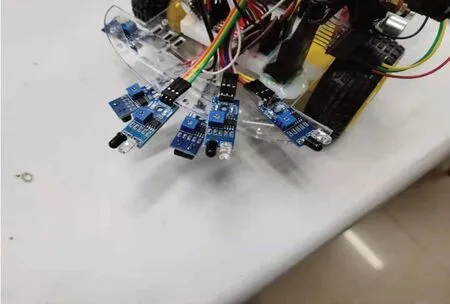
图1 红外传感器安装示意图
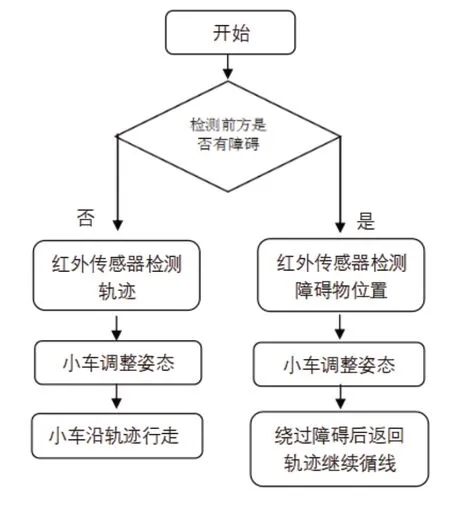
图2 红外避障流程图
1.2.3 标志识别
使用OpenMV4进行标志物识别;通过openMV4识别充电桩上标记,在行进过程中openMV4始终处于开启状态,不断寻找标志物,识别标志物成功后小车停车准备下一步动作[3-4]。
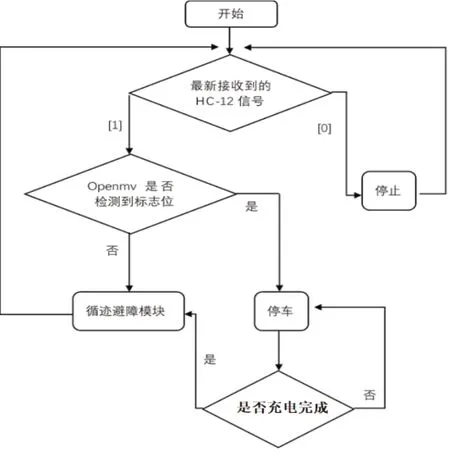
图3 标志识别流程图
1.2.4 无线充电
到达指定充电地点后,超声波测距传感器打开提示音提醒景区观赏人员无人车充电,避免靠近。通过磁耦合谐振式无线电能传输系统,采用发射线圈轮流充电的方式动态充电,充电完成后,小车继续循迹前进[5]。
1.2.5 图像传输
无人车搭载摄像头,在行进过程中录制图像,把录制的图像发送给树莓派。树莓派将接收到的无人车运行过程的图像数据显示到终端。
2 应用前景分析
该装置应用前景广阔,主要应用于景区突发状态情况监测、预判是否存在火灾隐患、景区宣传及紧急通知传达、救援物资的运送等。
2.1 用于景区突发状态情况监测
在景区内管理资源、控制监视设备、显示事件,可完成巡逻、监测、图像处理等,实现对景区的实时数据监测传输。面向应急突发事件处置的管理决策者,提供景区的全面监测数据综合直观展现,针对旅游突发事件的实时监测功能,帮助管理决策人员时刻跟进以形成最合理突发事件的处置方案,提高处置应急事件的能力。
2.2 用于预判是否存在火灾隐患
在监测系统对消防设施的远程实时监控下,可以将所巡检景区中消防监测设施运行状态进行实时反馈。同时,在消防设施发生运行故障时,系统将及时反馈故障信息回总控制中心并亮起警报指示灯,可督促负责人及有关部门及时整改,保证消防安全及设施正常运转。
另外,针对消防的“生命通道”易被堵塞的情况,实时监控系统可提供及时反馈,一旦监测到车辆或障碍物超出预期时间就会采集画面信息至总控制中心以便反馈给负责人,同时也会播报提示音示意车辆离开消防通道,以保证道路安全畅通。
2.3 用于景区宣传及紧急通知传达
集成各路巡查设备,基于地理信息系统,可实时连接监控人员的在岗状态、位置,支持查看巡查路线的详细信息、调取视频监控回传画面;支持一键直呼,协同调度。同时在面对火灾或者人员突发疾病等情况时,一方面此系统可以作为指挥长或参与其中的业务人员,为各类专家提供通信服务、信息服务,让专家决策更有依据、更加准确。另一方面能及时、有效地调集各种资源,对突发事件控制和救治起到极大帮助,最大程度地去减轻火灾对景区资源的损害以及突发疾病对游客健康和生命的威胁。
2.4 用于救援物资的运送
此无人车系统也可以实现救援物资的运送。在面对重大自然灾害时,一般车辆难以适应复杂地形,且需人力来进行车辆的驾驶,存在较大的安全隐患。无人车依靠于自主导航定位技术的实时性、准确性和稳定性,可安全可靠地完成物资的运输工作,减轻救援人员压力及救援风险,提高救援效率。针对提高救援物资无人车运动能力不足的问题,提高了无人车自主导航避障的能力。算法自主导航时,能够保证无人车适应不同环境,平稳地控制其实现循迹避障。此系统提高了无人车的灵活性,并设计了远程监控端进行功能的完善及扩展。
3 结语
生态景区兼有供人们认知自然和保护生态的功能,随着近年来安全事故与人为火灾的频繁发生,生态景区的安防工作不容小视。
本项目将定点无线充电、自动导航避障和视频监测传输相结合,实现无人车自动对景区全面监控,具有续航久、定位避障精确、大幅减少人工等优势。之后如何完善和优化,我们将继续探索。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
岷峨诗稿(2017年4期)2017-04-20
