
耦合忆阻复值神经网络的固定时间同步*
2021-03-27 05:48冯靓,胡成,于娟
新疆大学学报(自然科学版)(中英文) 2021年2期
冯 靓,胡 成,于 娟
(新疆大学 数学与系统科学学院,新疆 乌鲁木齐830046)
0 引言
1971年,蔡少棠教授首次提出了忆阻器,并以此刻画电荷和磁通量间的关系[1].由于忆阻器能够模拟人脑的记忆和遗忘机制,因而被研究者引入到神经网络,建立了忆阻神经网络(MNNs).目前,诸如稳定性[2]、同步[3]等MNNs的动力学行为已被各领域学者广泛研究.另一方面,由于比实值神经元具有更高的计算能力和信息存储能力,近年来复值神经元在模式识别、非线性滤波等方面得到了广泛的应用,并且忆阻复值神经网络(MCNNs)也成为了当前的研究热点[4,5].而在大多数的研究中,作者先将复值系统分离成两个实值子系统,再利用实值神经网络的经典理论分析两个实值系统的动力学行为.虽然这种分离方法是有效的,但忽略了网络的复值特征和优势,也会给理论分析和计算带来一定的困难.因此,探索分析MCNNs的新方法具有重要的理论价值和实际意义.
固定时间控制比传统的反馈控制具有更快的收敛速度,相较于有限时间控制,停息时间又不受初始条件的限制,因而近年来被各领域学者广泛研究.尽管目前已有相当丰富的实值MNNs的固定时间同步结果[6,7],而忆阻复值神经网络却由于理论分析上的困难极少受到关注.
基于上述分析,本文将研究具有时变时滞的耦合复值忆阻神经网络的固定时间同步.首先,为了避免现有结果[4,5]中将耦合忆阻复值神经网络分离为两个实值子系统,再设计两个实值控制器的复杂分析方法,本文引入了复值符号函数和复数域中的新范数,使控制器设计、Lyapunov函数的选取以及理论分析都能够在复数域内直接进行.其次,建立并证明了一个新的固定时间稳定性定理,改进了现有的结果[8].基于该定理,对耦合忆阻复值神经网络设计了新的固定时间控制策略,简化了以往的控制器设计,并得到了低保守性的固定时间同步准则.

1 模型描述及预备知识
参考Chen等提出的MCNN模型[9],本文考虑由N个MCNNs耦合而成的复杂网络,其动力学模型描述为:

对任意的1≤i≤N,定义同步误差为ei(t)=yi(t)-xi(t),那么由(3)和(5)可得,

为了得到本文的主要结论,还需引入如下引理及假设.
假设1 对任意的k=1,2,···,n,存在正常数Lk,Hk以及νk使得对任意的x1,x2∈C,

定义1 若存在正常数T*(φ,ψ),使得

并且存在正常数Tmax,使得对任意的φ,ψ∈CNn有T*(φ,ψ)≤Tmax,则称主从耦合MCNNs(1)和(4)是固定时间同步的,其中e(t)=(e1(t)T,e2(t)T,···,eN(t)T)T,φ和ψ分别为系统(1)和(4)的初始值.
引理1[12]对任意的i=1,2,···,N,假设bi≥0,并且0<θ≤1,δ>1,那么

引理4[12]对任意复数z∈C,如下结论成立:

定义2[14]令V(x(t)):Rn→R是一个正定、正则且径向无界的函数,并且x(t)在[0,+∞)的任意闭区间上是绝对连续的,那么x(t)和V(x(t))在t∈[0,+∞)上几乎处处可微,并且

其中:∂V(x(t))表示V(x(t))的广义梯度.
引理5 假设V(x(t)):Rn→R+是一个正定、正则且径向无界的函数,并且x(t)在[0,+∞)的任意闭区间上是绝对连续的,如果


2 主要结论


注1 在定理1中,如果β=0,T0的估计值将退化为如下形式

注2 在以往关于MCNNs动力学分析的理论研究中[4,5],其主要结论是通过将复值系统事先分离成两个实值子系统,再进行理论分析而得到的.不同于这种分离方法,本文复值符号函数的引入使得控制器设计、Lyapunov函数的选取以及理论分析均在复数域内进行.
注3 在大多数关于固定时间同步的研究中[6,7],关于同步误差的线性项在控制器设计中是必不可少的.与此不同,本文给出的控制策略移除了该线性部分,简化了传统的控制设计.另外,引理5将现有的固定时间稳定性推广到不连续系统中,并提高了已有工作[8]中给出的停息时间估计精度.
3 数值模拟
本部分将通过一个数值实例说明所得结论的有效性.
在系统(1)和(4)中,选取网络节点数为N=12,n=2,Πik={xik(t)∈C;|Re(xik(t))|+|Im(xik(t))|≤1.5,k=1,2},fk(xik(t))=tanh(Re(xik(t)))+i sin(Im(xik(t))),k=1,2,忆阻连接权重定义为:当xik(t),yik(t)∈Πik,di1=1.07+0.22i,di2=0.49-0.60i,ai11=2.20-1.03i,ai12=-0.14+0.60i,ai21=-5.10+3.49i,ai22=3.00-2.02i并且bi11=-1.59+0.10i,bi12=-1.19-0.13i,bi21=-0.10-0.42i,bi22=-2.10-1.90i;当xik(t),yik(t)∈/Πik,di1=0.98+0.12i,di2=0.51-0.62i,ai11=2.10-0.99i,ai12=-0.11+0.56i,ai21=-5.12+3.51i,ai22=3.10-2.08i,并且b i11=-1.65+0.15i,bi12=-1.11-0.12i,bi21=-0.19-0.40i,bi22=-1.99-1.89i.
基于以上参数,系统(1)中孤立节点的实部和虚部动力学行为模拟如图1和图2所示,这里x1(0)=-2.18-1.09i,x2(0)=-1.97+1.22i.

图1 孤立节点的实部相
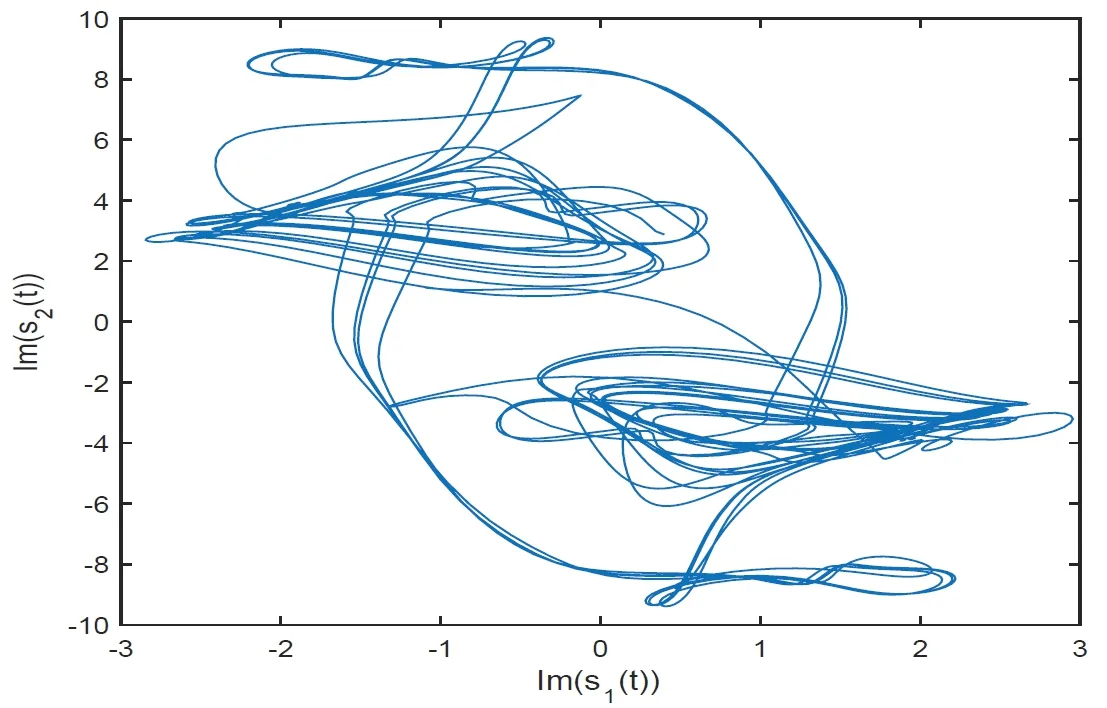
图2 孤立节点的虚部相图
对任意的i=1,2,···,12,k=1,2,选取gk(xik(t))=tanh(Re(xik(t)))+i tanh(Im(xik(t))).通过简要计算可得,Lk=νk=1,Hk=2.在控制器(8)中,选取下列控制参数:mi=14.70,ρ1=11.20,ρ2=34.26,θ=1.42.则由定理1可知,耦合MCNNs(1)和(4)是固定时间同步的,如图3和图4所示.此外,对应的停息时间估计分别为T*0=22.00,T*2=21.82.
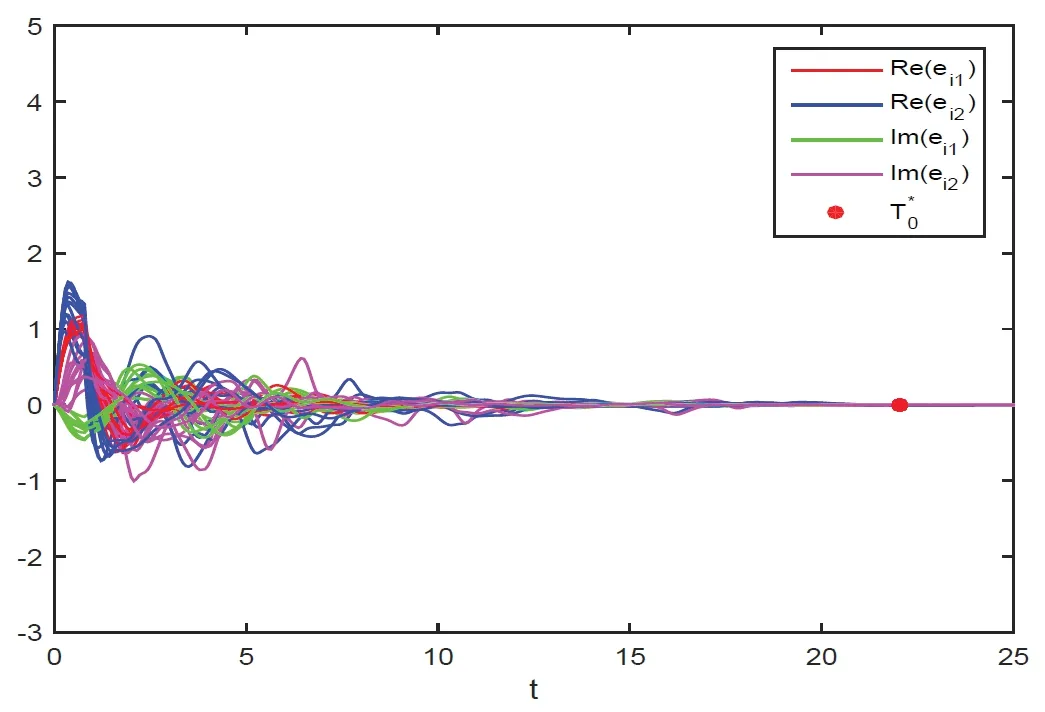
图3 β=0.5时的同步误差演化

图4 β=0时的同步误差演化
4 结论
本文主要讨论了一类具有时滞的耦合忆阻复值神经网络的固定时间同步.基于引入的复值符号函数和新的固定时间稳定性理论,设计了新的不连续复值控制策略,并通过构造新的Lyapunov函数来分析网络的固定时间同步.此外,所提出的控制方法通过移除线性部分简化了传统控制设计.未来工作将研究脉冲系统或时空网络的固定时间控制问题.
猜你喜欢
辽宁工业大学学报(自然科学版)(2022年4期)2022-09-19
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
煤气与热力(2022年2期)2022-03-09
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年9期)2019-05-30
网络空间安全(2019年8期)2019-03-18
