基于EHB 的坡道起步辅助策略开发∗
2021-03-22 09:11:46檀旋黄波于洋舒强
计算机与数字工程 2021年2期
檀 旋 黄 波 于 洋 舒 强
(1.上海工程技术大学 上海 201620)(2.上海同驭汽车科技有限公司 上海 201806)
1 引言
随着汽车工业的发展[1],传统燃油车对环境的污染越来越严重[2]。因此电动车成为当前汽车产业研发的重点[3]。与传统燃油车相同的是:电动车也面临坡道起步这一复杂工况。若驾驶员操作不当,极易造成车辆后溜,引发安全事故;或冲击度大,车辆前冲,驾驶舒适性差等问题。如何解决电动汽车坡道起步所面临的问题成为了研究人员的关注点。对于传统燃油车,刘海鸥等[4]针对AMT重型越野车辆大坡道起步过程中离合器摩擦片磨损严重的问题,提出了坡道起步改进控制策略。龚志辉等[5]提出一种基于ABS 装置的汽车辅助起步控制方法。D Delvecchio 等[6]基于装有EPB 系统的手动变速车辆做了一些坡道起步辅助技术研究。对于电动车,莫旭辉等[7]通过对电机的转速控制,将控制重点放在车辆起步扭矩补偿上,采用了增量PI算法达到车辆平稳起步且对坡道情况有良好的鲁棒性效果。胡建军等[8]提出了纯电动车起步控制策略,将起步分为无油门和有油门两种模式,制定了相关控制策略,实现了车辆起步时的平顺性及安全性。王洪亮等[9]基于EPB 进行坡道起步辅助系统设计,车辆起步时的冲击度与离合器滑磨得到有效改善。
电子液压制动(Electronic Hydraulic Braking,EHB)系统[10~12]作为一种新型制动系统,可进行协调式的电液制动力分配。在车辆坡道起步时更加合理的分配各车轮制动力,响应更加迅速,使车辆坡道起步时更加平稳。
2 简述EHB系统
本文所讨论的EHB系统[13]如图1所示。
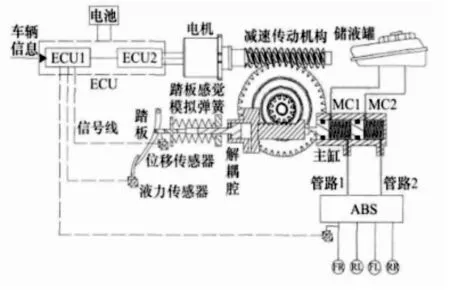
图1 EHB结构简图
此系统包括制动踏板、踏板位移传感器、踏板模拟器、电机、减速传动机构、制动主缸、液压力传感器、ECU 等。EHB 在正常线控制动时,EHB 根据内置位移传感器获得位移信号传输给ECU,ECU根据位移传感器测得的位移计算出所需制动液压力,并发出建压指令。此时电机响应ECU 的建压指令,通过减速传动机构推动主缸活塞运动,完成液压力建立。
目前,在电动车领域内,越来越多的车企将发展方向转向自动驾驶领域[14]。而EHB 作为新型线控制动系统,完全符合各车企发展的要求,具有很大的应用前景。
3 车辆坡道起步分析与控制策略
3.1 车辆动力学模型分析
车辆坡道起步动力学模型[15],如图2所示。

图2 车辆在坡道受力分析图
由图2 可知,车辆在坡道起步时受力有驱动力Ft,滚动阻力Ff,空气阻力Fw,坡道阻力Fi,加速阻力Fj,制动力Fb。

即:

式中Tm为电机驱动转矩,i0为主减速器传动比,η为传动系机械效率,r 为车轮半径,G 为作用在汽车上的重力,f 为滚动阻力系数,CD为空气助力系数,A 为迎风面积,ν 为汽车行驶速度,γ 为坡道角度,δ 为汽车旋转质量换算系数,为行驶加速度,m 为车重,Tumax为最大制动力器力矩,β 为制动踏板开度。
车辆刚起步时,我们可以认为此时的加速阻力为零,同时可以忽略空气阻力的影响。所以此时车辆受力有驱动力Ft、滚动阻力Ff、坡道阻力Fi以及制动力Fb。
3.2 车辆坡道起步过程分析
车辆坡道起步过程如图3所示。

图3 坡道起步受力过程示意图
0~P1段:车辆在坡道静止且未启动时,此时电机输出转矩为零,EHB根据坡度传感器检测到的坡度提供制动液压力,防止车辆后溜,即:

P1~P2段:当驾驶员开脚踩加速踏板,电机输出转矩开始增大,制动液压力随电机输出转矩增大开始减小,但此时电机输出转矩不够大,不能完全克服坡道阻力矩,所以电机输出转矩和制动液压力总和仍然要大于坡道阻力矩,即

P2点:在此时刻,电机输出转矩等于坡道阻力矩;即:

但此时制动液压力没有完全消失,若完全无制动液压力可能会导致在这一临界条件下,车辆发生后溜。
P2~P3段:驾驶员继续脚踩加速踏板,电机输出转矩继续增大。当电机转矩足够大时,即:

此时,电机输出转矩足够克服坡道阻力矩,EHB逐渐彻底释放,车辆平稳起步,即:

3.3 车辆坡道起步控制策略
由上述分析可知,车辆能在坡道平稳起步的关键在于电机转矩输出和电子液压制动(Electronic Hydraulic Braking,EHB)系统释放制动液压力是否能够精确配合。电子液压制动(Electronic Hydrau⁃lic Braking,EHB)系统在车辆坡道起步时能很好地补偿电机输出转矩,才能达到车辆在坡道平稳起步的效果。
装有EHB 系统的车辆来说,车辆坡道起步时EHB 将判断电机输出转矩,并结合坡道情况,无需驾驶员操作电子液压制动系统的情况下,完成车辆起步。车辆在坡道静止时,总体受力为

控制策略及算法框图如图4所示。

图4 EHB坡道起步控制策略算法图
阶段一:EHB 根据角度传感器获得信息,判断当前车辆是否处于坡道。若处于坡道,EHB将计算所需制动液压力p 大小,防止车辆后溜;否则判断处于平地,车辆可正常起步。
阶段二:驾驶员在坡道起步,踩下加速踏板,电机开始输出转矩Ft,EHB 跟随电机转矩输出减小p,此时判断电机输出转矩是否大于坡道阻力矩;若大于,EHB 逐渐减小制动液压力至零,车辆平稳起步。
阶段三:若阶段二的电机输出转矩不大于坡道阻力矩,说明此时驱动力矩还不足以使车辆起步,EHB 需要提供制动液压力防止溜坡。此时判断电机输出转矩与制动液压力之和是否大于坡道阻力矩,若不大于,说明EHB 释放制动液压力过快,可能导致车辆溜坡。此情况需要改变制动液压力释放速度,使电机转矩和制动液压力大于坡道阻力。若大于坡道阻力矩,驾驶员继续脚踩加速踏板,EHB减小制动液压力,直到电机输出转矩大于坡道阻力矩时,EHB 将同时控制制动液压力减为零,车辆在坡道平稳起步。
4 控制策略模型搭建
4.1 车辆坡道起步控制策略模型搭建
在Simulink/stateflow中将车辆坡道起步过程的控制策略用几个状态机之间的转换表示出来;
Step1:处于初始状态,EHB没有工作。
Step2:当条件next_1=true 时,状态将从Step1向Step2迁移。此时判断是否处于坡道。
Step3:当条件next_2=true 时,状态将从Step2向Step3 迁移。此时根据Step2 中测得的角度计算此时坡道阻力,根据坡道阻力获得EHB 所需提供的制动力。此时EHB进入工作状态。
Step4:当条件next_3=true 时,状态将从Step3向Step4 迁移。当开始踩下加速踏板时,EHB 提供的制动力Fb=Fang-Ftq。当驱动力大于坡道阻力与车速大于零时,EHB提供制动力为零。
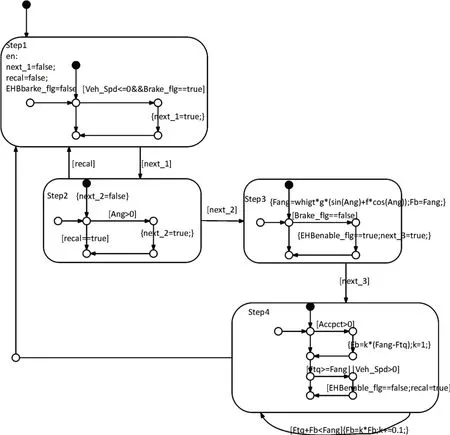
图5 车辆坡道起步时EHB各状态模型搭建
4.2 坡道起步模型
整个模型包括车辆动力学模型、坡道起步控制策略模型、以及液压控制模型。模型如图6所示。
5 仿真结果及分析
具体仿真车辆参数如表1所示。
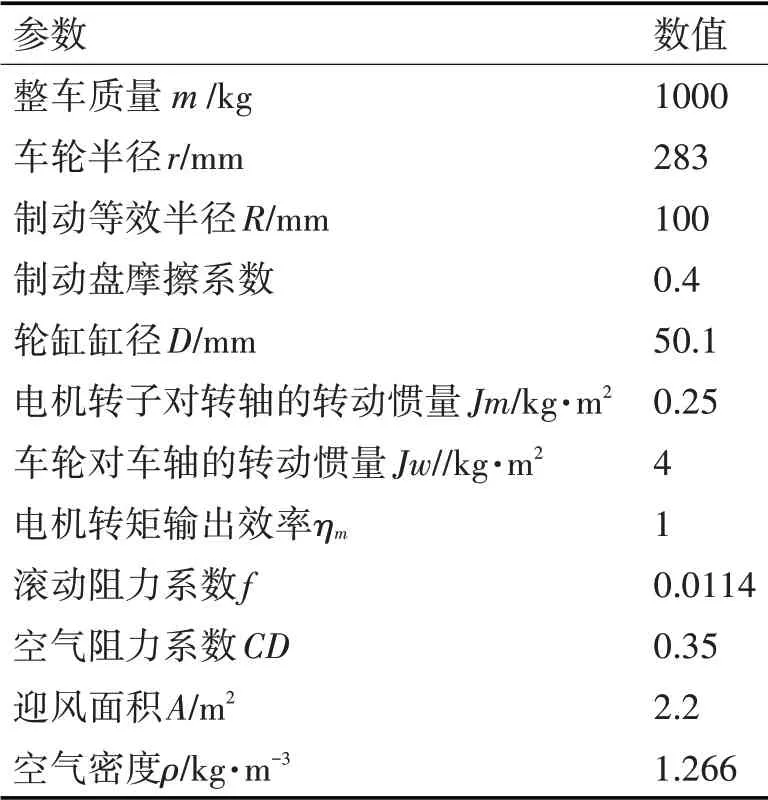
表1 仿真车辆几何参数表
通过拟合得到踏板开度与电机转矩的曲线。如图7所示。

图7 踏板开度与电机转矩曲线
以坡度角5°和电机转矩为输出,得到制动力、制动液压力、速度及冲击度的仿真结果图。如图8所示。
由图8(a)、(b)分析可知,在无电机转矩输出时,EHB 提供较大制动液压力来抵消坡道阻力,防止车辆后溜。随着驾驶员踩下加速踏板,EHB根据电机转矩输出调节制动液压力,逐渐减小制动液压力。
由图8(c)分析可知,车速没有出现负值。说明在此控制策略下,车辆在坡道起步时没有发生溜车。
由图8(d)分析可知,在此控制策略下,车辆在坡道起步时的冲击度控制在-0.1m/s3~0.1m/s3,此冲击度较小,符合驾驶员在坡道起步情况下对平顺性的要求。
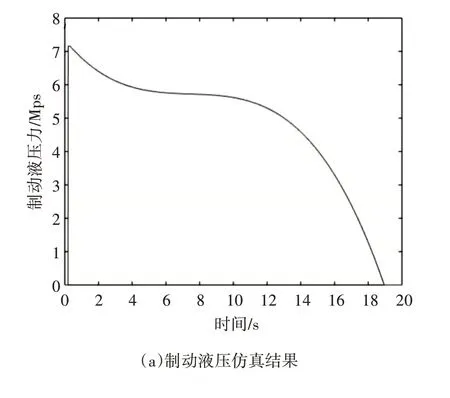

图8 坡道起步仿真结果
6 结语
通过对车辆坡道起步动力学分析,提出了基于EHB的坡道起步辅助策略开发。利用Matlab/Simu⁃link 软件,搭建了坡道起步辅助模型与EHB 模型。通过模型仿真,对仿真结果进行分析。通过分析仿真结果可知该控制策略有效可行,可防溜坡且冲击度小,驾驶平顺性良好。
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
汽车实用技术(2022年15期)2022-08-19 02:29:52
露天采矿技术(2022年1期)2022-02-20 03:48:08
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
黄河之声(2017年13期)2017-01-28 13:30:17
消费者报道(2014年13期)2015-03-19 11:22:22
河北科技大学学报(2015年6期)2015-03-11 16:16:45
消费者报道(2014年12期)2014-12-18 11:29:15
中国科技纵横(2014年22期)2014-12-11 03:46:12