
并联机构静刚度特性的分析与求解研究
2021-03-17 09:53朱春霞刘曦宏胡成柱
沈阳建筑大学学报(自然科学版) 2021年1期
朱春霞,刘曦宏,方 超,胡成柱
(沈阳建筑大学机械工程学院,辽宁 沈阳 110168)
相较于串联机构,并联机构由于“刚度大”的特点而在机床领域获得了更加广泛的应用,但是究其根本,由于研究时间短,且应用并不普及,刚度不足仍然是导致并联机床加工精度低的重要原因。
近年来,围绕并联机构刚度的研究一直在展开:耿明超等[1]以欠驱动并联机构为研究对象,通过建立其连续非线性柔度模型,得到了机构的方向刚度矩阵。徐东涛等[2]以Delta并联机构为基础,考虑重力和弹性变形的影响,以机构弹性变形对机构刚度特性进行了评价,使刚度特性分析更具准确性。崔学良等[3]以3RPS并联机构为研究对象,依据螺旋理论和矢量微分法,对支链各个构件与整体刚度的关系进行了分析,并对雅克比矩阵对刚度的影响进行了探讨。武振华[4]以3-RPR并联机构为研究对象,结合机构参数,运用MATLAB编程的方法分析了该机构的刚度特性。在更全面、更精确的目标导向下,学者们总结出不同的刚度研究方法,但不同的评价标准也给机构刚度的比较、分析带来困难,因此寻求合适的刚度分析方法,并建立统一的评价指标是并联机构刚度研究中亟待解决的问题。
基于此,笔者以3-TPT并联机构为对象,通过机构力学雅克比矩阵求解、支链轴向刚度的求解以及机构静刚度特性的分析对该机构整机刚度特性进行研究。选用最小特征值法和静刚度性能商法,运用Matlab软件仿真并联机构的刚度分布情况,并通过仿真分析,对比两种评价方法的优点及不足,为并联机构的进一步优化设计做出良好的铺垫。
1 并联机构静力学分析
静刚度分析的首要环节是静力学分析,而静力学分析则离不开静力学雅克比矩阵的求解。笔者以虚功原理为基础,进行了雅克比矩阵的求解。图1所示为并联机构的简图。分析机构的运动状态可知,其动平台只能平动,不能转动,因此只具有x、y、z三个方向的平移自由度,在三条支链上也只有沿着轴线方向的功。

1.定平台;2.移动副;3.虎克铰;4.动平台。
运用虚功原理,当3-TPT并联机构处于静态平衡的状态时,机构所有外力经过位移所做的功的总和为零。视机构所受的切削力为静载荷,记作F=(Fx,Fy,Fz),各个支链的驱动力为Fl=(F1,F2,F3),因此,可得出Fxδx+Fyδy+Fzδz=F1δ1+F2δ2+F3δ3.
(1)
式中:δx、δy、δz为输出点受外力时产生的虚位移;δ1、δ2、δ3为支链受外力时产生的虚位移。
推导可得[6]静力学正解表达式为
(2)
式中:l1,l2,l3为并联机构的杆长。
2 并联机构整机静刚度矩阵求解
2.1 并联机构刚度模型建立
忽略并联机构动平台和静平台的局部变形,将其视为理想刚体。将各个零部件重力、运动过程中产生的摩擦力以及环境因素带来的影响忽略不计。推导Gossilin公式可知,3-TPT并联机构的静刚度矩阵为K=J-TKlJ-1。其中,Kl是并联机构支链上的刚度矩阵,可表示为
(3)
其中,kii是第i条支链上的驱动关节在其轴向的刚度。
对逆雅可比矩阵进行结构化简:
(4)
则3-TPT并联机构的逆运动学雅可比矩阵为
(5)
其中,Ki1、Ki2、Ki3是刚度矩阵K中的元素,给定并联机构的各个参数,整机刚度矩阵K便可求出。
2.2 并联机构支链刚度求解
3-TPT并联机构的支链组成包括主、被动关节和杆件(见图2)。求得各个部分的刚度便可获得整个支链的刚度,求解过程如下。
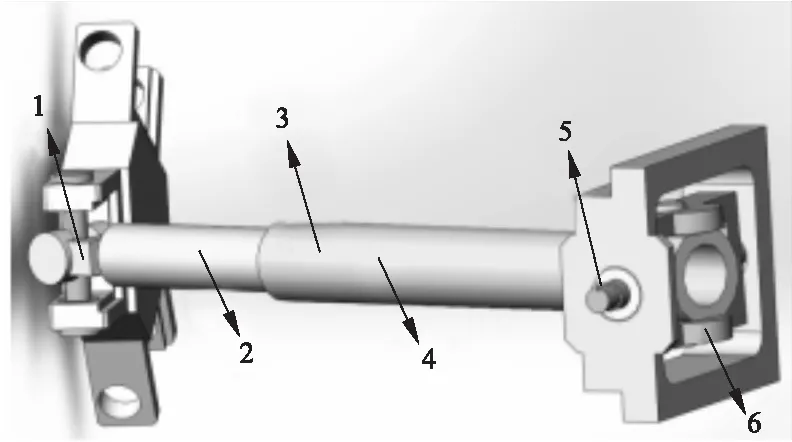
1.虎克铰;2.连杆;3.滚珠丝杠;4.连杆;5.轴承;6.虎克铰。
(1)主动关节轴向刚度计算。并联机构的主动关节为滚珠丝杠,在轴向上,其刚度主要包括丝杠的轴向刚度KS滚珠螺母的刚度KN,支承轴的刚度KB以及螺母支架和轴承支架的刚度KH。一般情况下,支撑轴承为标准件,而轴承支架、螺母支架的轴向刚度并不会对主动关节的轴向刚度产生过大的影响,因此对于这三个部分的刚度不做过多分析此。则该并联机构主动关节刚度K3为
(6)
(2)被动关节轴向刚度计算。对于3-TPT并联机构而言,其被动关节包括支链和动平台连接的虎克铰1以及其与静平台相连接的虎克铰6两部分(见图2)。在轴向上,虎克铰的刚度由轴承、轴承座以及转轴三大部分组成。由于轴承座具有较高的刚度,对整体刚度而言影响不大,而轴承为通用轴承,因此忽略这两部分的刚度影响,只考虑两转轴的轴向刚度。
(3)杆件刚度计算。在并联机构的支链上,主要包含两个连杆,分别将滚珠丝杆与动、静平台相连(见图2)。其中,杆件2为实心杆,杆4为中空结构。
刚度结构组成及计算结果如表1所示。

表1 各部分刚度计算Table 1 Stiffness calculation of each part
经过上述计算,可以得到3-TPT并联机构的支链刚度为
83 207.21 N/mm.
(7)
则支链的刚度矩阵可表示如下:
(8)
2.3 3-TPT并联机构整机刚度求解
选取机构工作空间上的两个极限位置点A(499.55,-286.11,699.98)、B(0,0,1 052),以及其工作空间内的任一点C(20,120,700),进行刚度矩阵的求解。
代入A点坐标到逆雅可比矩阵进而可以求得末端输出位置移动到A点时的刚度矩阵:
KA=J-TKlJ-1=105×

(9)
同理可得,B点的刚度矩阵为
KB=J-TKlJ-1=105×

(10)
C点的刚度矩阵:
KC=J-TKlJ-1=105×

(11)
分析A、B、C三点的逆雅可比矩阵和刚度矩阵可以得知:
(1)逆雅可比矩阵和刚度矩阵随着机构末端输出点坐标的变化而变化,因此很难依据矩阵数值的变化来分析刚度矩阵的变化规律。
(2)当并联机构的输出点位于z轴上时,机构的刚度矩阵为对角矩阵,此时,其在x、y、z三个方向上的刚度可以较为容易的得到。
(3)如果想要得知当机构受到外力作用时,其动平台上输出位置的变形,还需要进行更深入的分析。
3 并联机构刚度分析方法对比与分析
3.1 最小特征值法仿真分析
最小特征值法是运用矩阵变换,求解机构刚度变换矩阵的最小特征值,并以此为基础,进行工作空间上最小刚度值的分析。
将并联机构末端输出点受到的外力记为向量F,其在外力作用下产生的变形记为向量X,求得两向量的内积并做比,则得到一个系数Q(X):
(12)
设矩阵K0=KTK,K0的特征值为λi(i=1,2,3),运用矩阵的性质,Q(X)的取值范围可以确定,即λmin 利用Matlab软件,分别选取Z=700 mm、Z=800 mm、Z=900 mm、Z=1 000 mm四个平面,对3TPT并联机构工作空间内的点进行仿真分析,得到机构最小特征值λmin的分布如图3所示。 图3 最小特征值分布图Fig.3 The distribution diagram of the minimum eigenvalues 仿真图中,x、y轴为并联机构动平台输出点的X、Y坐标,z轴为四个平面上,工作空间内每一点对应的最小特征值。 分析图3可知: (1)在Z=700 mm、Z=800 mm、Z=900 mm、Z=1 000 mm四个平面上,最小特征值的分布呈现圆环形的变化趋势。其中,当输出点位于z轴上时,具有最大的最小特征值,随着离中心位置越来越远,其最小特征值也不断减小。这与静刚度性能商的分析结果相符。 (2)由于在四个平面上,最小特征值的变化规律相似,也可以推断,并联机构在空间z轴上的任一平面上,最小特征值的分布基本呈现由中间向两边递减的趋势。 (3)分析四个平面上最小特征值的极值可以发现,随着输出点Z坐标的增加,最小特征值的最大值减小,而当工作空间逐渐减小时,最小特征值的最小值反而增大。 总而言之,最小特征值法具有简单便捷的优点,但是运用此种方法得到的分析结果也具有一定的局限性,只能反映机构刚度性能可能的最小值点,而不能反映在外力作用下,刚度的变化规律,因此不够明晰和准确。 不同于最小特征值法,静刚度性能商法求出了直接值,而不是给出了一个范围,因此更为准确,更具有指导意义。 分析并联机构在x,y,z方向不同、大小相同的力的作用下,水平方向和竖直方向的刚度情况,对该并联机构进行两组仿真。第一组,对末端执行器分别施加三个沿坐标轴方向的力,其力的向量分别为Fx=(500,0,0)、Fy=(0,500,0)、Fz=(0,0,500),选取工作空间中的Z=800 mm平面,分析该平面上的静刚度性能商值分布。第二组,对末端执行器施加三个沿坐标轴方向的力,分别为Fx=(500,0,0),Fy=(0,500,0),Fz=(0,0,500),选取并联机构工作中的中心轴位置,通过MATLAB软件求出该轴上各点在不同的力的作用下、距离静平台不同位置的刚度情况。 仿真模型: (13) 其中,Fi表示Fx、Fy、Fz。 运用MATLAB进行仿真,得到三个不同的外力作用下的刚度性能分布如图4所示。X,Y为平面上点的x,y轴坐标,z轴的坐标值Z为静刚度性能商值。当X,Y值不变时,刚度矩阵的变化主要与Z值相关。仿真结果如图5所示。 图4 水平方向 上P(X)值分布图Fig.4 The distribution of P(X)values in the horizontal direction 图5 竖直方向上P(X)值分布图 通过图4可以看出,在水平方向和竖直方向上,静刚度性能商的值存在着一些规律: (1)观察图4(a)可知,该并联机构的静刚度性能商在某一个位置达到最大,然后在其四周呈环形下降;由此可见,与最大值位置的水平距离越大,该点的静刚度性能商值越小,其变形量越大,因此在并联机构刚度性能优化中,可以对这些点的刚度进行提升。 (2)观察图4(b)可知,当并联机构受x,y方向的力的作用时,在中心轴上,距离静平台越远,静刚度性能商值越小。而受z轴方向力时,则越远离静平台,静刚度性能商值越大。除此之外,由于该并联机构为对称结构,当机构受到x,y轴的力的作用时,静刚度性能商的分布情况大致相同。 (3)分析图4、图5可以发现,在z方向力的作用下,并联机构的静刚度性能商值远大于受x、y方向力的情况。以此可以推断,在设计过程中,可以优化机构的输出点受力,使其可能沿z轴方向,并对x方向以及y轴方向上的刚度进行提升,以实现机构的结构优化。 (1)采用两种评价指标,最小特征值法以及静刚度性能商法,基于Matlab软件,对机构的刚度情况进行仿真和分析,对比发现相较于最小特征值法,静刚度性能商法可以表现出在外力的影响下机构刚度的变化趋势,因此更具有指导意义。 (2)并联机构在Z轴方向具有更高的刚度,并且越远离Z轴,下降速度越快;该结论也为并联机构进一步的优化设计提供了基础。
3.2 静刚度性能商法仿真分析


4 结 论
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
数学物理学报(2021年5期)2021-11-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
东北电力大学学报(2015年1期)2015-11-13
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05
北京航空航天大学学报(2014年1期)2014-12-19
