
基于RTK技术的无人机应用于铁塔三维建模中的精度分析
2021-03-16 02:47张涛刘瑞葛亮高国庆许志勇
中国管理信息化 2021年4期
张涛 刘瑞 葛亮 高国庆 许志勇


[摘 要]文章主要采用大疆精灵Phantom 4 RTK技术进行杆塔数据采集,影像坐标采用自带的RTK定位模块。在此基础上,对电力铁塔进行三维建模。为了提高三维建模的精度,对无人机影像进行三维重建。结果表明,RTK的定位模式能满足铁塔建模的要求,结合无人机影像三维重建技术,可提高精度。
[关键词]RTK技术;无人机;铁塔;三维建模
doi:10.3969/j.issn.1673 - 0194.2021.04.043
[中图分类号]TM75[文献标识码]A[文章编号]1673-0194(2021)04-00-03
0 引 言
在过去,电力部门对铁塔数据的收集主要依靠人力,采用经纬仪、测高杆等专业仪器对铁塔数据进行收集。这种方式不仅对人力要求较高,而且检测结果不准确,检测效率较低,已经难以满足现代电网运营和管理工作的精细化和高效化要求[1-2]。无人机具有视野广阔、飞行高度可灵活变化等特点,可以不受设备设施高度的限制,能充分发挥近距离拍摄和数据图像处理的优势,因此,无人机测量成为电力部门常用的一种测量方式。特别是基于RTK技术的无人机,可实现实时动态测量,并且可同时搭载红外热像仪、可见光数码相机等设备,利用这些设备能有效搜集获取输电走廊的红外影像资料、可见光等,能显著提高测量的精度[3-5]。大疆精灵Phantom 4 RTK是一款目前市面上常见的小型多旋翼高精度航测无人机,主要用于对低空进行测量,具有非常高的成像系统和导航定位系统,而且体积较小,携带方便,航测效率高。而将基于RTK技术的无人机应用于铁塔三维建模中,具有更高的测量精度,可为铁塔三维建模提供更为精准的技术保障。
1 基于RTK技术的无人机应用于铁塔三维建模的流程
1.1 无人机数据采集
采用大疆精灵Phantom 4 RTK智能无人机进行数据采集。该无人机搭载2 000万有效像素的摄像设备,可实现1.5 cm左右的垂直定位和1 cm左右的水平定位。通过无人机中内置的图像补偿器,对相机的中心点进行自动校对。在采集数据时,需要确定测定区域的位置,对测定区域内无人机的飞行航线进行合理规划。若测定区域环境比较差,首先应该将区域划分成多个测定区域,对于每个区域,根据面积和长度的大小,合理规划飞机的飞行架次和飞行时间[6-7]。对于数据采集的方式,一般采用1个垂直、4个倾斜的方式来进行,飞行高度约为离地面50 m,旁向的测量范围重叠面积为60%,具体采集流程如图1所示。
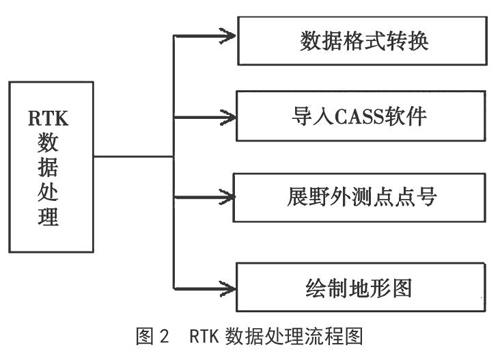
1.2 RTK数据处理
在进行RTK数据处理时,主要使用专业的数据处理软件,如果CASS9.1等。通过这些软件,根据RTK采集到的数据进行地形图绘制。野外测量中可能会使用全站仪等设备进行辅助测量,因此,在绘制地形图的过程中,需要将不同仪器设备测量到的数据进行格式转化,都转化成CASS9.1软件可以导入的格式[8-9]。對于RTK数据的处理,具体流程如图2所示。
1.3 无人机数据处理
无人机数据处理使用的是Smart3D 4.4.9和EPS2016三维测图软件。其中,Smart3D软件主要是将无人机影像数据进行正投影像和三维模型建设;EPS2016三维测图软件主要是根据Smart3D软件获得的正射影像和三维实景模型进行三维测图。
对于无人机数据的处理,首先应该筛选无人机影像所采集到的数据,对于明显不符合实际的数据、模糊的影像图片等进行剔除[10]。采用大疆Phantom 4 RTK采集的POS数据可以自动写入影像中。其次,在Smart3D软件中设置好参数,根据测量区域的范围进行自动摄影和三维实景建模。再次,通过EPS2016软件进行地形图绘制。该方法受地形和环境的影响较小,效果较高[11-12]。无人机数据处理流程如3所示。
2 无人机影像三维重建精度分析
2.1 利用三视图约束的全局式重建
所谓全局式重建,是指在得到两两影像相对位姿及大量连接点后,利用一定约束条件一次性求解所有影像在全局统一坐标系的位姿,然后只需进行一次光束法平差进行优化。该方式较依赖迭代优化架构的增量式方法,重建效率高。全局式重建处理流程如图4所示。
利用三视图约束的全局式重建对三维模型构建的精度主要体现在搜索三视图的匹配情况,匹配率对三维精度构建具有最为直接的影响。
2.2 RTK辅助重建
RTK辅助的三维重建,是指将无人机所搭载的RTK收集到的信息作为影像位置概略初值的三维重建方法。图5为RTK辅助重建流程图。
利用RTK辅助的三维模型重建,RTK数据精度对三维建模的精度影响较为明显。
2.3 精度影响及分析
由于基于RTK技术的三维建模不需要进行复杂的影像位置估计运算,在得到影像匹配结果后,该方法只需估计影像全局一致旋转参数,并将其转换至标准坐标系下,就可以实时获取影像位姿初值,重建效率高。但是,重建精度依赖于RTK精度,需要搭载单点定位高精度RTK的无人机。而大疆精灵Phantom 4 RTK无人机可有效解决此问题。
全局一致旋转参数可以利用最小二乘方法求解。然后,需要将全局一致转换至RTK坐标系下,以实现影像位置和姿态坐标系的统一。该转换可以通过相机在全局坐标系下的相对平移和RTK坐标系下平移之间的对准来实现。
对于像对(i, j),假设影像i和j由本质矩阵分解得到的相对平移方向向量为tij,影像j的全局一致性旋转矩阵为Rj,则在全局坐标系下,相对平移方向向量为Tij=Rjtij,而在RTK坐标下,两相机中心近似相对平移为:
RTKij=RTKj-RTKi(1)
其中,RTKi和RTKj为RTK记录的影像i和j对应位置,二者之间的关系可通过式(2)来描述:
(2)
其中,,为RTK坐标系下相机平移方向向量;Rtrans即为要求的两坐标系转换矩阵。
求解Rtrans的问题是一个正交Procrustes问题,可以利用奇异值分解法(Singular Value Decomposition,SVD)解决。得到Rtrans后,对全局进行旋转变换,就得到了与RTK坐标一致的影像姿态参数。然后,利用并查集的多视匹配点提取算法提取多视匹配点,由影像位姿参数进行三角化运算(摄影测量中前方交会),得到点的三维坐标。可以李莹 等[13]提出的方法,选取摄像基线最长的两个视图来进行三角化,并根据重投影误差对三维点进行筛选,保留重投影误差小于一定阈值的点,与影像位置、姿态参数一起进行光束法平差优化。
基于三视图约束的全局方法在一次性估计出影像全局一致位姿参数后,只需要进行一次光束法平差,因而,重建效率较增量法有了明显提高。但是,为了保证重建的稳健性,该方法运用了三视几何约束条件,由于无人机影像重叠度较大,三度重叠甚至多度重叠的情况极为普遍,这样就带来了大量的三焦张量计算、三视匹配点重建等相关计算[14]。而RTK辅助的重建方法直接利用RTK数据作为位置参数初始值,避免了影像全局一致位置参数的计算,大大简化了求解问题,同时全局一致旋转参数解算效率较高,计算用时少,有效提高了三维建模的精度。
3 结 语
基于RTK技术的无人机在铁塔三维建模中的精度要求较高,可以通过全局式重建方法利用三视几何约束剔除粗差,也可以结合RTK辅助重建技术,保证图像重建的稳健性。在以后的研究中,利用基于RTK技术的无人机进行铁塔三维建模时,还要加强对铁塔附近的树木、建筑物对构建三维实景模型的影像和空地影像联合建模的影响的研究。
主要参考文献
[1]王伟斌,王城钢.东北电网500 kV输电线路带电作业现状[J].东北电力技术,2006(11):78-80.
[2]张凤梅,叶非.无人机影像验片辅助系统设计与实现[J].城市勘测,2012(5):72-74.
[3]徐云鹏,毛强,李庭坚.输电线路机巡与人巡效果对比及协同巡检建议[J].南方电网技术,2016(2):44-47.
[4]申静.基于输电线路智能化高压输电线路无人机巡检装置研究与实现[J].国网技术学院学报,2018(5):121-124.
[5]胡毅,王力农,刘凯,等.750 kV同塔双回输电线路带电作业技术研究[J].高电压技术,2009(2):373-378.
[6]张海军,张国亮,赵雪松,等.500 kV紧凑型输电线路耐张塔带电作业工具的研制[J].電网技术,2005(24):82-84.
[7]于德明,沈建,汪骏,等.直升机与人工巡视效果对比分析[J].中国电力,2008(11):25-28.
[8]蔡妃友,郭章俭.无人机在航标巡检中的应用和展望[J].珠江水运,2018(21):121-122.
[9]李亚男,道勇,王骏,等.无人机低空摄影测量技术在电力线路工程中的应用[J].电力勘测设计,2016(5):34-37.
[10]郑小兵,郑彦春,张红军,等.无人机摄影测量技术用于电力勘测工程的探索和设想[J].电力勘测设计,2009(6):22-24,32.
[11]袁慧洁.基于无人机遥感和面向对象法的简单地物分类研究[J].测绘与空间地理信息,2020(3):113-117,123.
[12]王猛,隋学艳,梁守真,等.利用无人机遥感技术提取农作物地物覆盖度方法研究[J].作物杂志,2020(3):177-183.
[13]李莹,于海洋,王燕,等.基于无人机重建点云与影像的城市地物分类[J].国土资源遥感,2019(1):149-155.
[14]李冬雪,高志强,尚伟涛,等.基于无人机多光谱影像的海滨景区浒苔信息提取研究[J].海洋环境科学,2020(3):438-446.
猜你喜欢
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
环球人文地理·评论版(2016年5期)2017-01-03
科学与财富(2016年15期)2016-11-24
中小企业管理与科技·下旬刊(2016年11期)2016-11-18
电脑知识与技术(2016年24期)2016-11-14
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
科技视界(2016年6期)2016-07-12
