激光寻的空地导弹制导控制方法
2021-03-16 06:33邹汝平陈士超陈韵张建灵
兵工学报 2021年1期
邹汝平, 陈士超, 陈韵, 张建灵
(中国兵器工业第203研究所 第一总体部, 陕西 西安 710065)
0 引言
制导控制是导弹实现安全发射、稳定飞行与目标精确打击的核心环节,其导引和控制导弹按照预定弹道规律飞行,高精度命中与毁伤目标,制导控制性能直接决定了空地导弹的作战使用效能[1-2]。导弹的制导控制系统包括寻的制导和遥控制导两种基本类型[3]。遥控制导虽然弹上装置较为简单,但当导弹射程较远时,制导精度将会变差。寻的制导的制导系统全部装于弹上,具有较高的制导精度,已成为近年来最重要的制导体制。美国“捕食者”等察打一体无人机挂载的AGM-114系列空地导弹是典型的寻的制导空地导弹[4-5]。
不同制导体制的技术特点不尽相同,作战使用方式各异,相互之间性能互补[6-8]。与其他制导体制相比,激光寻的制导精度高且成本相对低廉,作战适应性强,使用载机本身的稳定瞄准指示系统或协同方的目标定位激光照射系统,空地导弹可灵活实现“指哪儿打哪儿”,实现坦克、车辆、工事、舰船等多种威胁目标的高效毁伤。激光寻的制导武器日益成为直升机载和无人机载空面作战的主战武器,是机载对地精确打击武器的上佳选择[9-10]。
不同于被动图像寻的制导体制或者主动毫米波寻的制导体制,激光寻的制导体制中导引头的视场较大,不需要图像制导与毫米波制导中较为复杂的导引头扫描搜索设计以及目标指向设计[11]。因此,对于激光寻的制导导弹,弹体上不需要安装较为昂贵的惯性导航装置,仅仅通过陀螺仪的安装,即可实现导弹的平稳控制,同时保证威胁目标的高概率捕获。
针对激光半主动寻的空地导弹高精度制导与精确打击需求,本文提出一种适用于激光半主动寻的空地导弹的制导控制方法。详细分析了激光寻的制导特性,通过对倾斜、俯仰和偏航3个通道的控制回路设计,在高概率目标捕获的前提下,实现导弹弹体的稳定控制,保证了高效毁伤威胁目标所要求的弹目交汇状态。
1 激光寻的目标捕获
1.1 制导控制系统组成
通常而言,制导控制系统包括目标探测系统、飞行控制系统以及空地导弹本身[12]。目标探测系统依托直升机载火控侦察设备提供待攻击目标的定位定向信息;飞行控制系统由飞行控制器、舵机、惯性导航装置(或仅简单采用速率陀螺仪、姿态陀螺仪)、导引头等组成。导引头感知和测量目标信息,惯性导航装置(陀螺仪)实时测量导弹的运动状态,飞行控制器对目标和导弹的信息进行综合处理,形成导弹的控制指令,驱动舵面偏转,实现对导弹飞行状态的控制。
1.2 激光寻的目标捕获
激光寻的制导空地导弹本机作战的典型流程如下:在导弹发射后,由载机的激光指示器适时启动照射目标,激光导引头接收漫反射的激光回波信息,制导控制系统根据导引头输出的视线角速度,综合解算控制指令,控制空地导弹飞向目标。激光寻的制导空地导弹的作战过程示意图如图1所示。

图1 激光寻的空地导弹的作战过程示意图Fig.1 Illustration of the combat process of AGM with a laser seeker
理想条件下,导弹经过中制导段飞行后,当导引头开始工作时,目标应位于激光导引头的视场中心,即导引头的光轴刚好指向目标。导引头视场投影的示意图如图2所示。
图2 导引头视场投影示意图Fig.2 Projection of seeker’s FOV
图2中,M表示导弹位置,h为导弹相对目标的飞行高度,Ta表示目标位置,Rs为激光导引头的识别距离,ϑs、ψs分别为激光导引头的俯仰瞬时视场角和偏航瞬时视场角,|BD|表示导引头的瞬时视场纵深,|AC|表示导引头的瞬时视场宽度。
然而,在导弹飞行过程中,导弹的飞行轨迹及目标定位均会有一定的散布。对于图像导引头和毫米波导引头而言,通常需要通过导引头扫描或采用弹目指向设计来保证导引头对目标的准确捕获[13-14]。对激光导引头而言,其视场范围较大,基于武器系统对目标的侦测性能指标,对于主要打击非高速运动目标的空地导弹而言,弹道的漂移不会使目标落入激光导引头视场之外。
假设激光导引头对目标截获的事件X满足正态分布,即X~N(μ,σ2),则截获概率PX[15]可以表示为
PX=P{μ-kσ≤X≤μ+kσ}=
φ(k)-φ(-k)=2φ(k)-1,
(1)
式中:φ(·)为正态分布函数;k为倍数;μ为均值;σ为标准差。
根据(1)式可以分别求得导引头在俯仰与偏航方向的截获概率Pp、Py:
(2)
(3)
式中:Δp和Δy分别为中制导结束时俯仰方向和偏航方向的弹目综合散布大小;Wp和Wy分别为俯仰方向和偏航方向的导引头半视场宽度,可由ϑs、ψs以及Rs解算得到:
Wp=Rs·tan (ϑs/2),
(4)
Wy=Rs·tan (ψs/2).
(5)
Δp和Δy受弹体姿态测量与控制误差导致的位置误差、目标定位误差以及导引头误差的影响,可分别表示为
(6)
(7)
式中:Δpp和Δpy分别为俯仰方向和偏航方向的弹体姿态测量与控制误差导致的位置误差(简称为导弹位置误差),其受到陀螺仪测姿精度、导弹姿态控制等因素的影响;Δlp和Δly分别为俯仰方向和偏航方向的目标定位误差,其受到载机光电测量设备测距精度、测角精度、轴系校准精度、照射精度、载机延时、数据传输延时等多种因素的影响;Δsp和Δsy分别为俯仰方向和偏航方向导引头产生的位置误差,主要受到导引头框架角零位误差的影响。
目标定位误差可通过(8)式计算获得:
(8)
(9)
式中:Δd为载机光电测量设备的测距误差;R0为载机与目标之间的距离;Δφp为载机光电测量设备在俯仰方向的测角误差;Δφy为载机光电测量设备在偏航方向的测角误差;vT为目标速度;T0为系统延迟时间总和。
导引头产生的位置误差可通过(10)式和(11)式计算获得:
Δsp=Δφps·Rs,
(10)
Δsy=Δφys·Rs,
(11)
式中:Δφps为导引头俯仰框架角零位误差;Δφys为导引头偏航框架角零位误差。
导弹位置误差受到弹体姿态测量与控制误差的影响,陀螺仪是导弹角运动的测量器件,对导弹的姿态误差产生直接影响。而弹体的姿态误差将直接导致弹道倾角与期望弹道倾角的差异,使得导弹的速度矢量发生改变,继而产生导弹位置误差。导弹飞行时间越长,陀螺误差漂移越大[16]。由于弹体姿态误差导致的俯仰方向位置误差Δpp和偏航方向位置误差Δpy可分别表示为
(12)
(13)
式中:v(t)为导弹的飞行速度;Δϑ(t)表示陀螺仪在俯仰方向的漂移角度;Δφ(t)表示陀螺仪在偏航方向的漂移角度。
以某典型参数的直升机载激光制导空地导弹为例,其识别距离Rs=3 000 m,导引头俯仰方向和偏航方向的瞬时视场大小均为±15°,即图2中的ϑs/2=ψs/2=15°,导弹射程为10 km,Δϑ和Δφ的漂移角度为0.75°/40 s. 典型参数下各类误差如表1所示。利用(6)式与(7)式计算可得,综合误差Δp=86.24 m,Δy=44.69 m.
表1 典型参数下激光寻的导弹系统误差和捕获概率
由表1可见,由于激光导引头视场较大,导引头不进行扫描处理的条件下,即可以获得100%的目标截获概率。因而,激光制导空地导弹可在不安装捷联惯性导航装置的条件下实现对目标的高精度截获,弹上仅仅通过获取陀螺仪的信号就可实现对导弹的稳定控制和目标的高效毁伤。
导引头对目标的截获概率Pc可以表示为
Pc=PpPy.
(14)
此外,导弹受到的干扰力矩和气动力误差同样会导致综合误差的增大,但对于大视场的激光导引头而言,仅仅通过陀螺仪的姿态测量,就既可完全满足目标落入概率的要求,又能显著降低空地导弹的成本。
2 激光寻的制导控制方法
激光寻的制导空地导弹的飞行控制过程主要包括3个阶段,即初制导段、中制导段和末制导段。为实现对空地导弹的飞行控制,原理上可以通过对导弹俯仰、偏航、滚转3个通道的姿态控制,实现对导弹质心运动的控制。本文提出的激光寻的制导控制方法如图3所示。
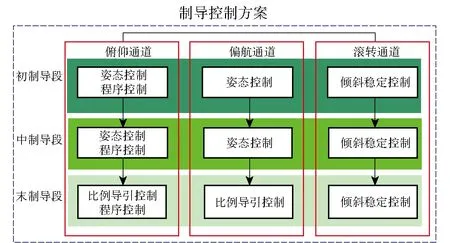
图3 激光寻的制导控制方法Fig.3 Proposed guidance control method for AGM with laser seeker
2.1 倾斜稳定控制
对于滚转通道,采用全程(初制导段、中制导段和末制导段)倾斜稳定控制,倾斜姿态稳定回路的主要目的是为高低和方位控制提供基准,将重力补偿信号正确地引入俯仰通道,并消除俯仰通道和偏航通道之间的交叉耦合。滚转通道的倾斜稳定是俯仰控制回路和偏航控制回路能够正常工作的前提,此外,倾斜稳定还可以消除因常值倾斜干扰力矩引起的倾斜角稳态误差,提高导弹的导引品质和动态品质,提升导引头稳定截获目标的概率。倾斜稳定回路的原理框图如图4所示。
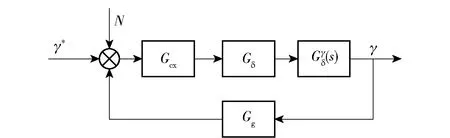
图4 倾斜稳定回路原理框图Fig.4 Block diagram of tilt stability control loop

根据滚转通道弹体模型,选择比例+积分+微分(PID)控制器[16-17]作为倾斜稳定回路的控制器设计方案,以保证系统具有良好的动态品质,同时可以消除因常值倾斜干扰力矩引起的倾斜角稳态误差。
倾斜稳定回路PID控制器的传递函数模型[17-18]为
(15)
式中:KP、KI、KD分别为PID控制器的比例项增益、积分项增益和微分项增益。
2.2 姿态稳定控制
姿态控制回路的主要作用是抑制因导弹离轨初始扰动、初始安装误差、发动机推力偏心等因素引起的飞行弹道的散布。姿态控制可抑制初制导段的初始扰动,实现中制导段期望的平飞弹道。对于具有较大静稳定度的空地导弹而言,其本身的短周期振荡运动是严重欠阻尼的,阻尼系数很小时,宽频带噪声将导致攻角振荡值增大,使得诱导阻力增加,射程减小。此外,较小的阻尼系数还会降低导弹的跟踪精度,甚至导致导弹失控[19],因此,将阻尼回路作为姿态控制回路的内回路,以有效增大导弹的等效阻尼系数。
2.2.1 阻尼控制回路
在俯仰、偏航通道控制系统采用角速率反馈,以改善弹体的阻尼特性。阻尼回路的结构框图如图5所示。
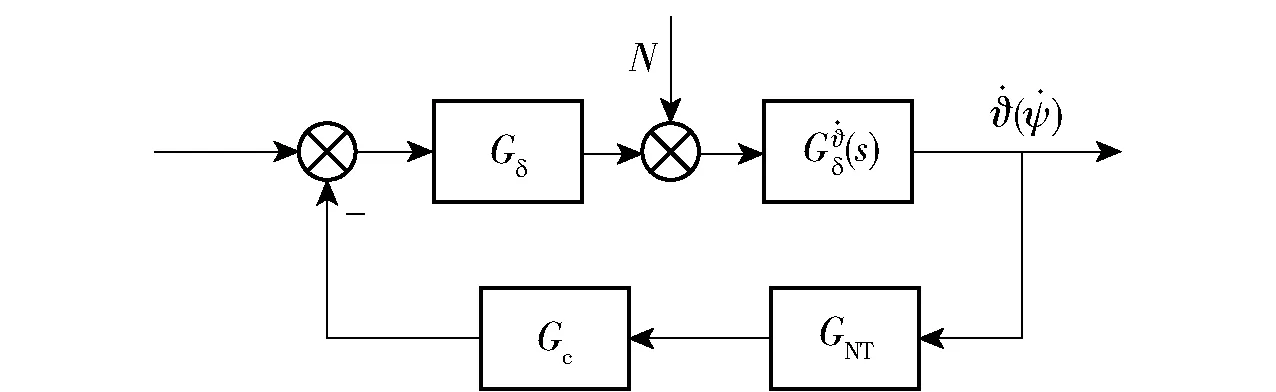
图5 阻尼回路结构框图Fig.5 Block diagram of damping loop

根据俯仰(偏航)通道弹体阻尼特性,选择合适的增益参数并增加1阶滤波器作为阻尼回路的控制器,以保证增加阻尼控制后,导弹具有良好的阻尼性能。阻尼控制器的传递函数可以表示为
(16)
式中:Kc1表示阻尼控制器增益;T表示阻尼滤波器时间常数。将阻尼回路进行简化,如图6所示。
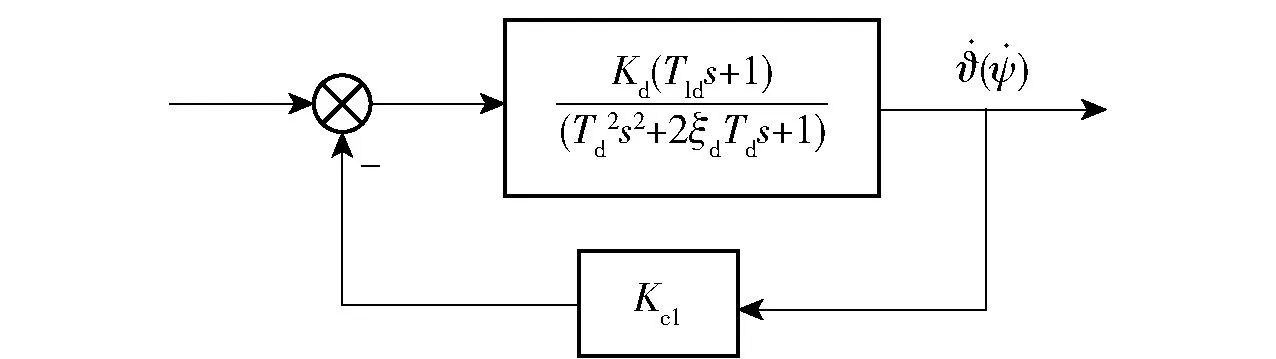
图6 简化的阻尼回路结构框图Fig.6 Block diagram of simplified damping loop
根据图6,经简单的数学变换,可以推导得到阻尼回路的闭环传递函数:
(17)
式中:
(18)
(19)
(20)

(21)
即
(22)
以某典型激光寻的空地导弹参数为例,利用文献[20]方法进行Td、T1d和Kd的参数计算,阻尼回路增益Kc1的结果如图7所示,增加阻尼回路前后弹体阻尼对比结果如图8所示。
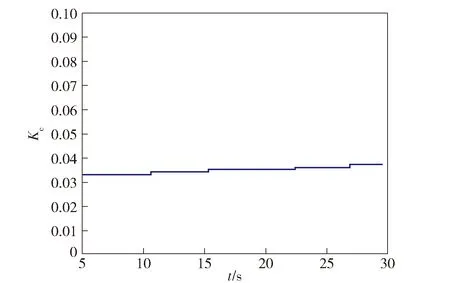
图7 阻尼回路增益Kc1设计结果Fig.7 Designed gain coefficient Kc1 in damping loop
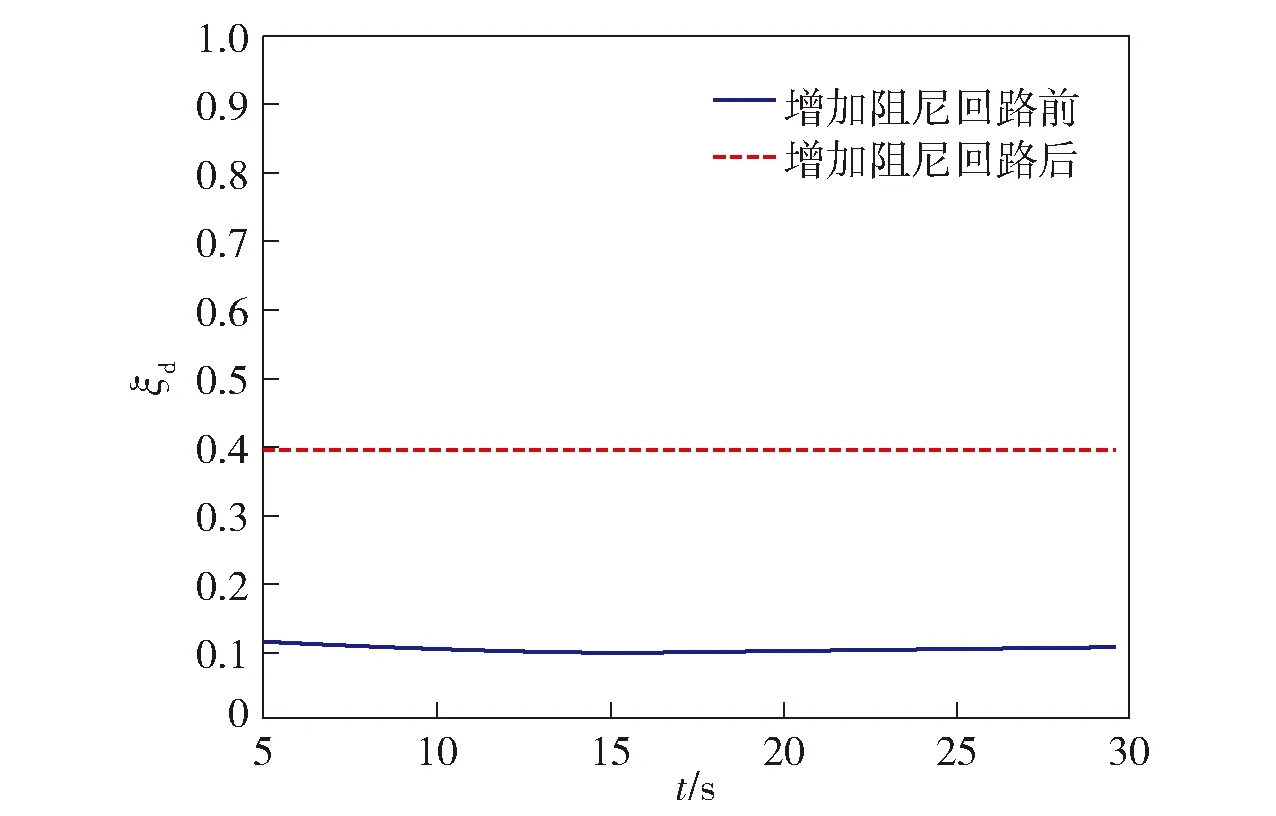
图8 增加阻尼回路前后弹体阻尼对比Fig.8 Comparison of damping characteristics with/without damping loop
2.2.2 姿态控制回路
俯仰(偏航)姿态控制回路原理框图如图9所示。俯仰姿态控制回路的输入ϑ*为设计的导弹爬升规律,俯仰姿态角按照该规律变化,导弹在预定时间内爬升到期望的飞行高度。偏航姿态控制回路的输入ψ*为弹目线方位角,在初制导段和中制导段,导弹偏航姿态角追踪弹目线方位角有利于提高导引头对目标的捕获概率。
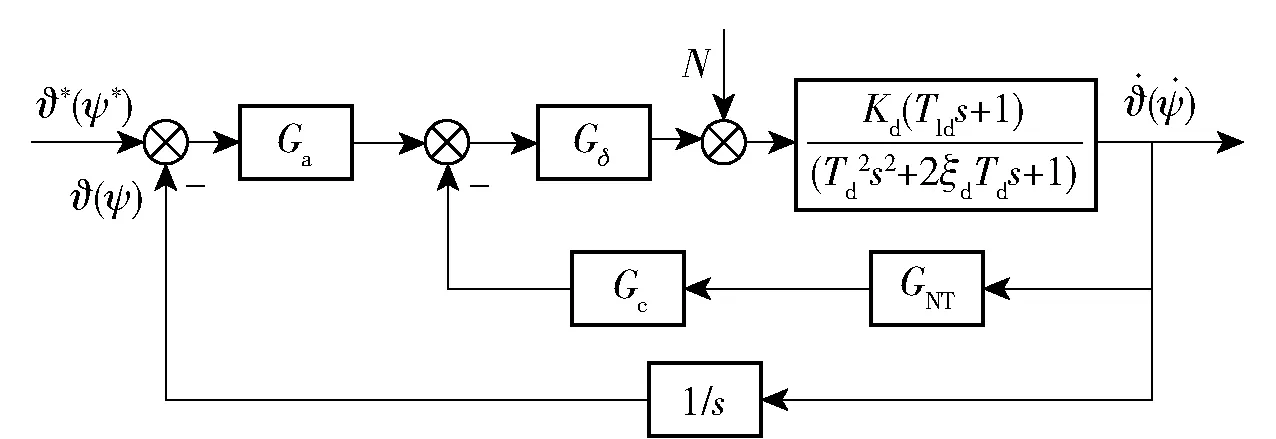
图9 姿态控制回路结构框图Fig.9 Block diagram of attitude control loop
图9中,ϑ*、ψ*分别为俯仰姿态控制回路输入、偏航姿态控制回路输入,ϑ、ψ分别为俯仰姿态角、偏航姿态角,Ga为姿态控制器。
选择超前- 滞后校正网络[20-21]为姿态控制回路的控制器设计方案,以保证系统具有良好的动态品质。姿态控制器的传递函数[21-22]可以表示为
(23)
式中:Kc3为姿态回路超前- 滞后控制器增益;T1、T2、T3、T4分别为姿态回路超前- 滞后控制器参数。
2.3 比例导引制导律
对于末段寻的制导方式,比例导引制导律[23-24]易于实现且具有较高的制导精度。激光导引头可以输出俯仰方向和偏航方向的视线角速度信号,利用该信号可实现比例导引制导律,导引导弹命中目标。比例导引制导律的原理是导弹在攻击目标的导引过程中,导弹速度矢量的旋转角速度与目标视线旋转角速度呈比例,即满足[23-24]:
(24)
(25)


图10 比例导引控制系统结构框图Fig.10 Block diagram of proportional guidance control system
2.4 程序控制
设计程序控制指令,用以克服弹体受到的重力等外力扰动,保证导弹与目标交会时的较优落角值,实现对高威胁目标,尤其是装甲类目标的有效毁伤。程序控制指令的设计原理是实现力平衡与力矩平衡,导弹力平衡与力矩平衡的示意图如图11所示。
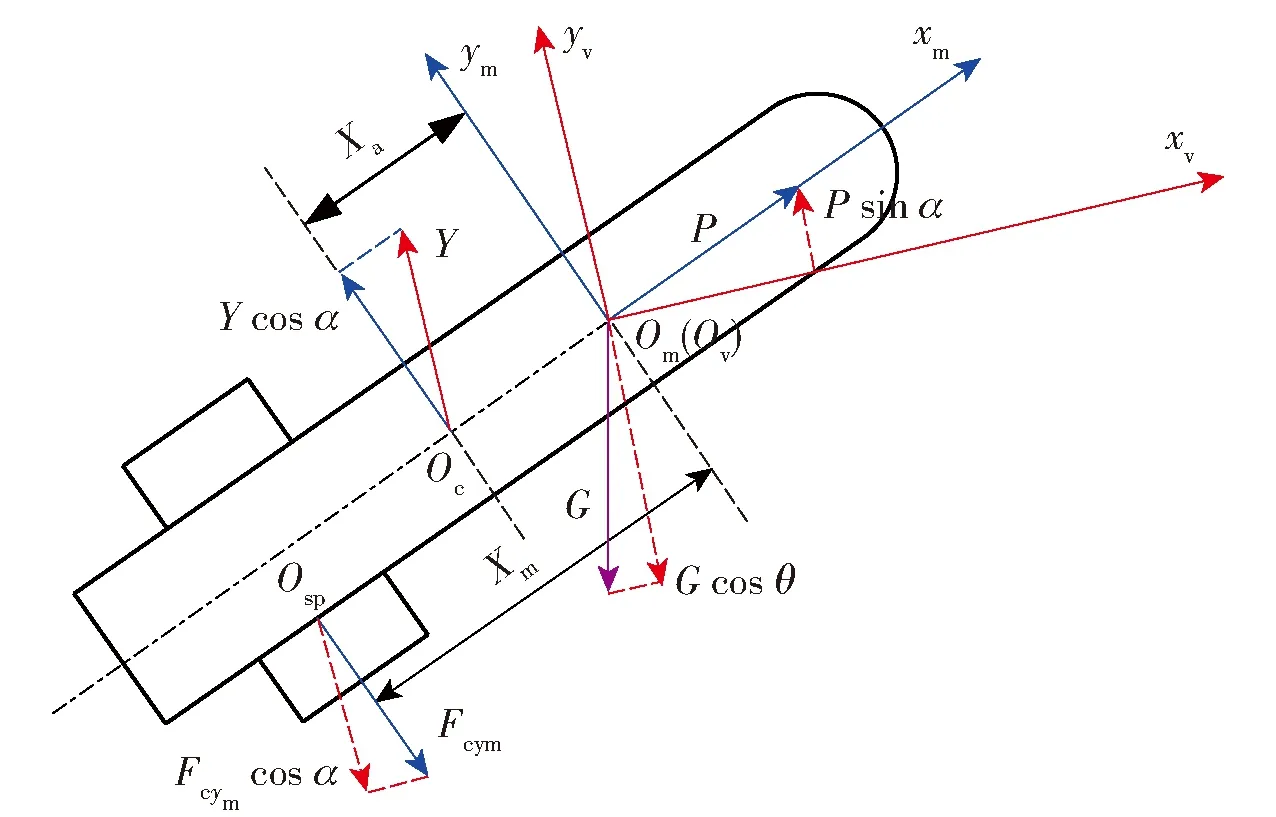
图11 导弹力的平衡与力矩平衡示意图Fig.11 Illustration of force balance and moment balance

在速度坐标系Ovxvyvzv上受力平衡时,满足:
Y+Psinα=Fcymcosα+mgcosθ.
(26)
在弹体坐标系Omxmymzm上力矩平衡时,满足:
Ycosα·Xa=FcymXm.
(27)

(28)
(29)
由(29)式可得
(30)
(31)
以某射程为10 km的激光制导空地导弹为例,待攻击目标为装甲类目标。欲保证此装甲目标的高效毁伤,需要较大的攻击落角。有无程序控制条件下的y向弹道对比曲线如图12所示,俯仰角对比曲线如图13所示,可见,无程序控制条件下的末制导段导弹俯仰角较小,无法满足装甲类目标(如主战坦克等)的大落角攻击需求。

图12 有无程序控制条件下y轴方向弹道对比曲线Fig.12 Curves of missile trajectory along y direction with/without programming control
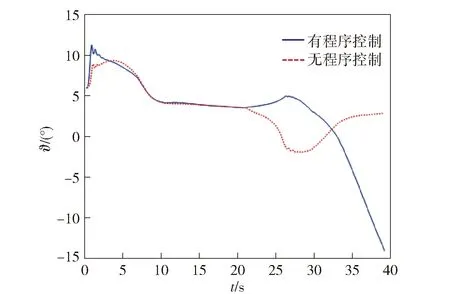
图13 有无程序控制条件下俯仰角对比曲线Fig.13 Curves of pitching angle with/without programming control
3 激光启动照射时间设计
对于激光寻的空地导弹而言,激光启照时间的确定关系到整个制导控制系统的设计。为了保证照射平台的安全性,需要精确计算激光照射器的启动照射时间,减少不必要的激光指示时间,降低激光照射平台暴露以及被实施激光干扰的风险。此外,激光照射器的工作时间越长,热积累越多,将直接影响激光二极管的工作温度,继而影响激光能量。因此,激光照射时间越长,对照射器的重量和温控电功率的需求越大[25]。而受限于空地导弹武器系统激光照射器的尺寸和重量,激光照射器无法长时间进行工作,准确的激光照射时间计算可显著降低激光照射器的照射时间。
空地导弹的射程和激光导引头的有效作用距离直接决定了激光启动照射时间的设计。然而,空地导弹在实际应用中,不同温度、不同海拔高度、不同载机飞行速度等条件都会对空地导弹的飞行时间产生影响,仅仅考虑空地导弹的射程与激光导引头的有效作用距离无法实现激光启动照射时间的精确计算。图14给出了不同海拔、温度以及载机飞行状态条件下某空地导弹的速度曲线,可以看到明显的速度特性差异。
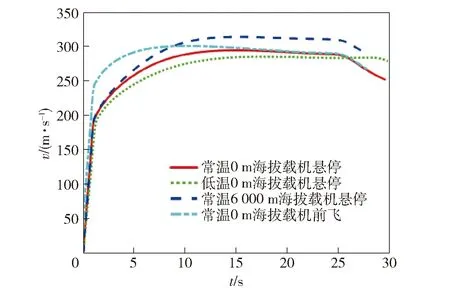
图14 不同条件下导弹速度特性对比Fig.14 Missile velocities under different conditions
因而,空地导弹的激光启动照射时间,同样受到上述各因素的影响。为了解决多种因素对激光启动照射时间的影响问题,可采取多维插值的方式进行处理。首先,根据空地导弹的使用范围和攻击包络,选取温度特征点、海拔高度特征点和载机飞行速度特征点;然后,将导弹的最大射程和最小射程进行均匀分段处理,获得导弹飞行距离区间段;再基于导弹的6自由度模型,分别计算不同温度、不同海拔高度、不同载机飞行速度条件下的导弹飞行时间,建立温度、海拔高度和载机飞行速度的导弹飞行时间三维数表。具体应用时,根据导弹所处环境信息进行三维插值,获得激光启动照射时间。
4 试验结果
通过某激光寻的空地导弹验证本文所提制导控制方法的有效性(见图15)。此激光导引头俯仰和偏航方向的瞬时动态视场均为±15°,激光导引头的有效识别距离为3 km,空地导弹的射程为10 km,攻击目标为装甲类静止目标。采用本文所述制导控制方法,进行导弹6自由度仿真。通过理论计算结果和实际飞行试验结果对比的方式,验证本文所述方法的有效性。导弹的y轴方向和z轴方向位置曲线分别如图16和图17所示。俯仰、偏航和滚转姿态角分别如图18~图20所示。由试验结果可见,采用本文所述方法进行激光寻的空地导弹的制导控制,导弹的位置和姿态飞行结果符合期望,可以取得满意的试验结果,该导弹实现了威胁目标的精确打击,命中精度满足导弹武器系统的总体要求,实现了该装甲类目标的高效毁伤。

图15 某激光寻的空地导弹发射瞬间Fig.15 A moment of launching a laser guided AGM
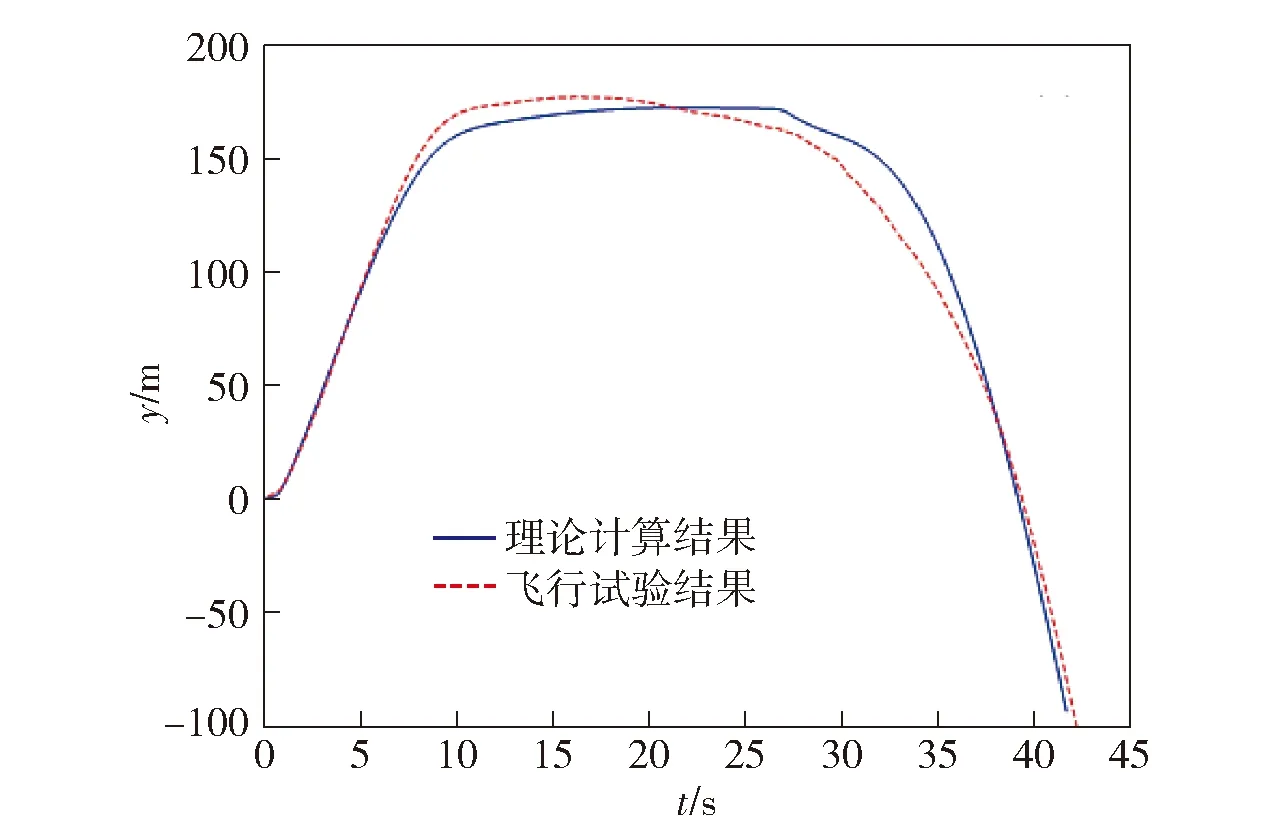
图16 y轴方向弹道曲线Fig.16 Curves of missile trajectory along y direction
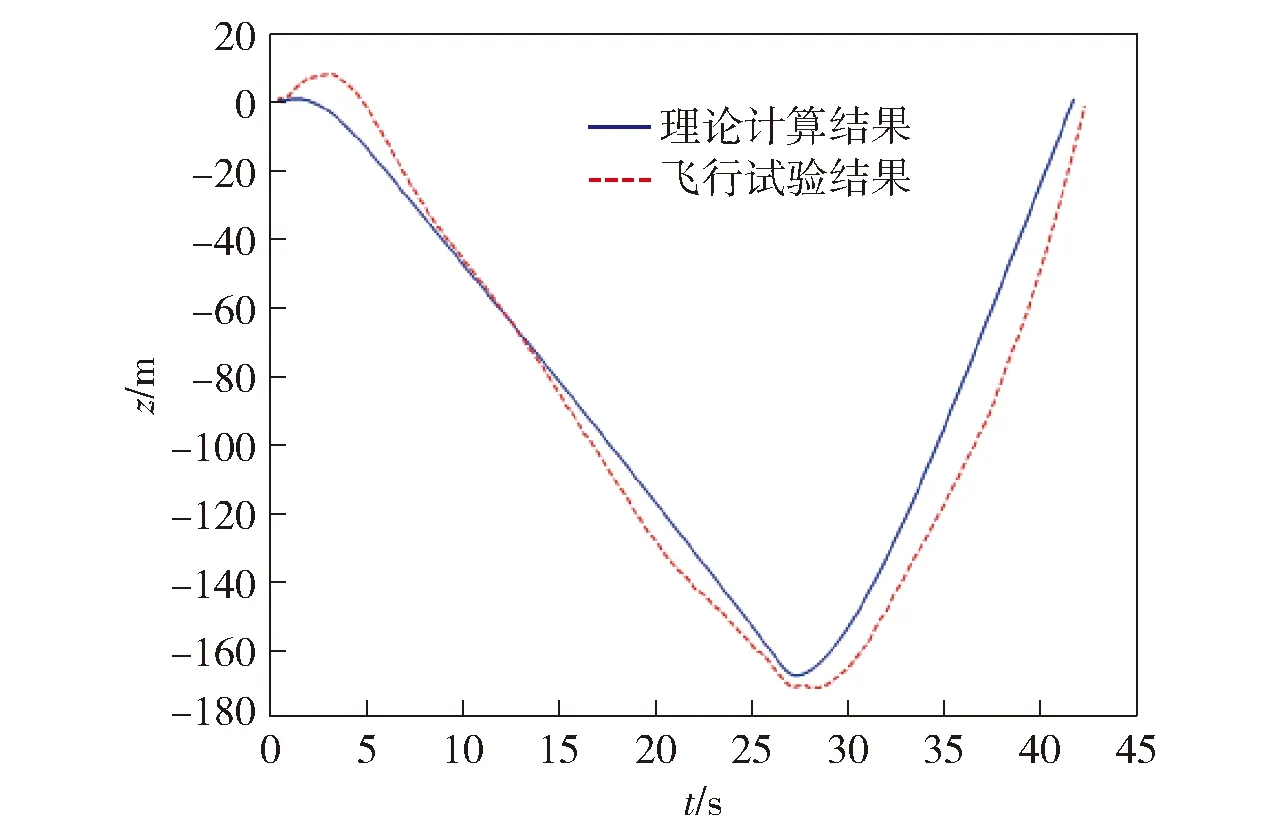
图17 z轴方向弹道曲线Fig.17 Curves of missile trajectory along z direction
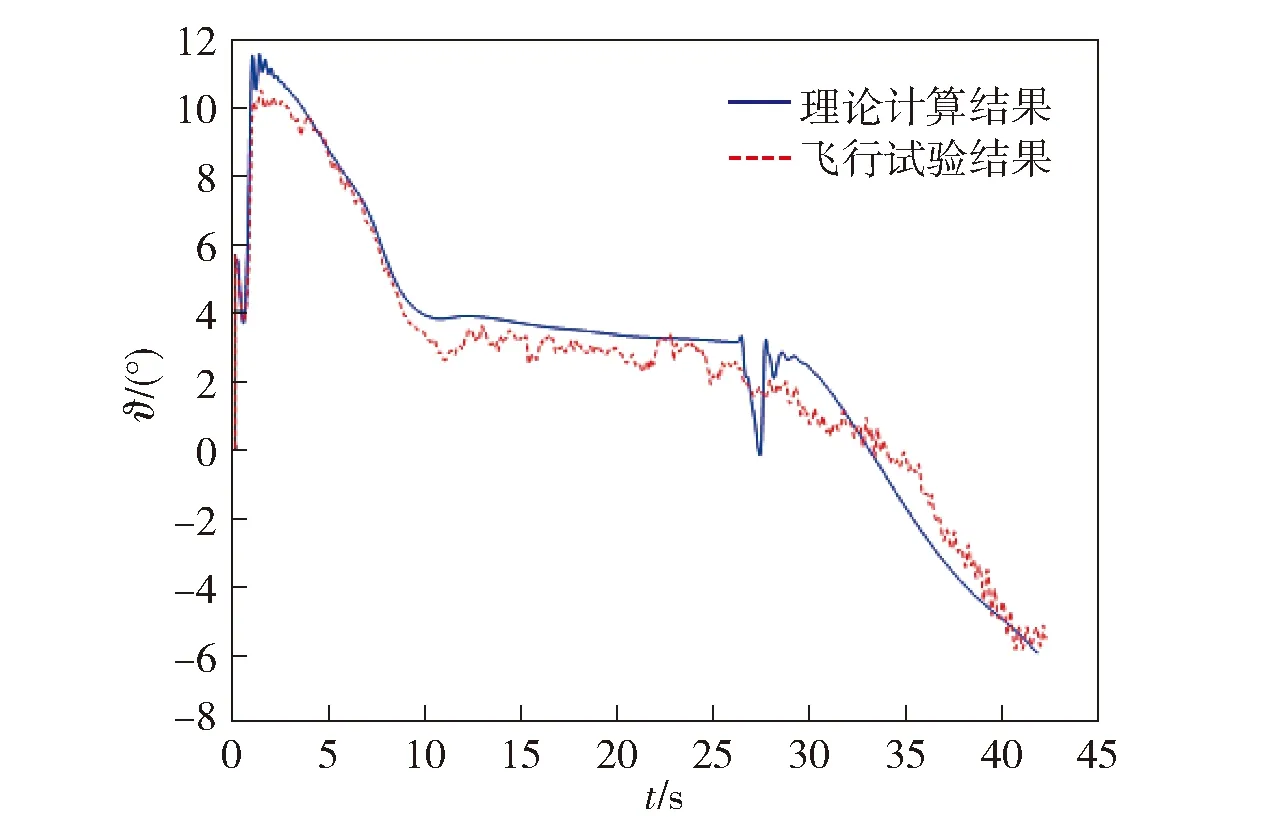
图18 俯仰角曲线Fig.18 Curves of pitching angle
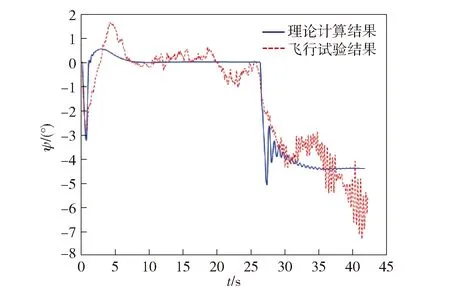
图19 偏航角曲线Fig.19 Curves of yawing angle

图20 滚转角曲线Fig.20 Curves of rolling angle
需要说明的是,由图16~图20可见,虽然理论设计的导弹位置和姿态结果与飞行试验取得的结果相吻合,但是仍然有部分较为明显的差异。这是由于导弹在飞行过程中的某些误差难以精确估计,如导弹初始离轨扰动的大小、舵机安装角度误差等原因导致导弹受到的干扰力矩以及气动力误差等。这些误差的精确估计与补偿非常困难,误差的存在将导致理论设计结果与飞行试验结果的偏差。
此外,导弹在飞行过程中还不可避免地受到环境因素的影响,例如导弹飞行过程中的风速大小、海拔高度以及载机平台的飞行速度等。对于制导控制系统而言,这些参数同样难以精确描述与补偿,环境因素的存在也会对理论设计与实际飞行试验结果的差异产生影响。
5 结论
本文提出了一种适用于激光寻的空地导弹的制导控制方法,通过倾斜稳定控制、姿态控制、比例导引控制以及程序控制的设计与有机结合,实现了导弹弹体的稳定控制以及高概率目标捕获。
激光寻的空地导弹的飞行试验结果表明,采用本文所述方法,通过对俯仰、偏航和滚转3个通道的控制,在弹上仅安装陀螺仪的条件下,即可实现对导弹俯仰、偏航、滚转3个通道的姿态控制。理论设计的弹道和姿态角与导弹的实际飞行结果相吻合,程序控制可保证目标高效毁伤的落角需求。本文所述制导控制方法可实现激光寻的空地导弹的弹体稳定控制,可为威胁目标的精确打击和高效毁伤提供坚实的技术支撑。
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
材料研究与应用(2022年4期)2022-09-01
无人机(2022年1期)2022-05-20
科技创新与应用(2019年24期)2019-10-24
科学与财富(2018年26期)2018-10-24
航空兵器(2018年1期)2018-04-09
建筑工程技术与设计(2015年29期)2015-10-21
软件导刊(2015年8期)2015-09-18
电子技术与软件工程(2015年6期)2015-04-20
中国科技术语(2004年3期)2004-03-11