基于单点激光检测的枪弹弹头快速匹配系统
2021-03-16 06:33潘楠潘地林蒋雪梅刘益钱俊兵赵成俊
兵工学报 2021年1期
潘楠, 潘地林, 蒋雪梅, 刘益, 钱俊兵, 赵成俊
(1.昆明理工大学 民航与航空学院, 云南 昆明 650500; 2.昆明智渊测控科技有限公司, 云南 昆明 650500;3.公安部 物证鉴定中心, 北京 100038; 4. 昆明信诺莱伯科技有限公司, 云南 昆明 650228)
0 引言
涉枪案件对人民生命财产安全及社会秩序稳定造成极大危害,是各级公安机关重点打击对象[1]。枪弹弹头痕迹具有不易破坏、难以伪装、唯一性、鉴定价值好等特点,准确而快速地确定作案枪种对于枪案的侦破具有极为重要的意义[2-5]。
弹头痕迹检验的主要任务是进行枪弹的种属认定和所发射枪支的同一性认定[6]。针对这两个问题,需要根据弹头痕迹确定子弹与枪支之间的关系,重复出现的痕迹很有价值,因为它反映了枪支有关机件的固有特征。两支同样生产工具依次生产的枪具备很多相似点(如相同膛线),这些相似点是对枪支种属的认定依据。同一支枪发射出弹头上的痕迹能有效反映发射枪支部件的细节特征。只要枪支机件没有本质的变化,通过检验弹头上的痕迹,即可对所属枪支进行同一认定[7]。
现阶段,已有相关研究人员对弹头膛线痕迹检验进行了研究,文献[8]中构建了弹头膛线痕迹摄像比对系统,提出一种适应曲面物体的自动聚焦算法,取得了不错的效果。文献[9]中设计了一种弹头膛线痕迹单点激光检测装置,包括硬件和软件两部分,具有一定的现实意义。文献[10]介绍了两个基于图像处理的弹头膛线痕迹自动识别系统,并验证了系统的有效性。
传统的弹头膛线痕迹匹配方法包含比对显微镜检测法、分段照相、触针检测等。这些方法均存在匹配耗时长、效率低、受主观因素影响大,无法量化分析等缺点,不能满足弹头膛线痕迹检测快速性和准确性的需要[11-14]。因此,公安机关急缺需要一种能快速、准确、自动识别检验弹头痕迹的方法。另外,我国实行严格的枪支管控政策,对公务用枪进行登记建档管理,由于公务用枪数量巨大(普通地级市即数以万计),如何利用膛线痕迹进行枪支快速建档,成为公安、军队、法院、检察院、监狱等单位的关注重点[15]。
单点激光测试具有受环境光影响少、精度高、数据文件体积小、频响特性好等特点,对于微观特征的非接触式检测非常有效。因此,将单点激光测试应用于枪弹膛线痕迹相似性匹配,不啻为一种可行的尝试。然而,在解决实际问题时仍然需要面对保证试件同轴同相位、检测信号稳健、痕迹特征快速提取等难题[16-18]。
为了克服上述存在的问题,本文提出一种基于单点激光检测的枪弹弹头快速匹配系统,该系统首先进行弹头圆心位置和圆柱轴线的自适应调整,随后利用激光位移传感对枪弹弹头膛线痕迹沿圆周方向进行360°环绕检测(数据采集),利用广义形态滤波将检测数据进行降噪处理后,再利用皮尔逊相关系数进行痕迹相似度比对计算,最终实现弹头痕迹快速匹配。
1 检测仪器与检测方法
1.1 检测仪器
所使用弹头痕迹单点激光检测装置(见图1)为昆明信诺莱伯科技有限公司自主研发,其激光传感器参数(经公安部第三研究所认证中心出具检测报告)如表1所示。图1中CCD为电荷耦合器件。
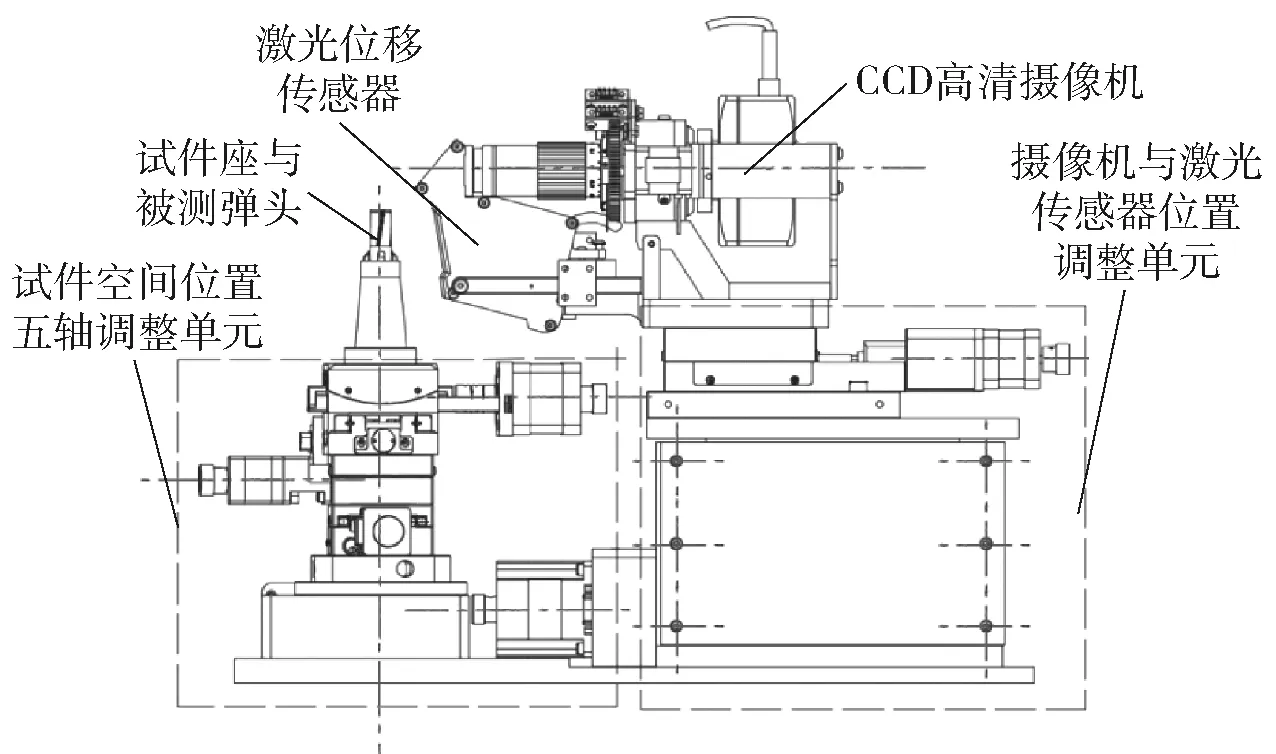
图1 枪弹弹头痕迹激光检测仪Fig.1 Bullet traces laser detector
表1中,x为横轴,y为纵轴,z为竖轴,符合笛卡尔坐标系。检测仪器的试件空间位置五轴调整单元(见图2)由5个电动载物台组合而成,分别为电动角位台1、电动角位台2、电动平移台1、电动平移台2和电动旋转台。5个电动载物台之间由螺钉相互连接,计算机通过控制每个载物台的步进电机运动来调整试件的5个方向位置。该五轴位置调整单元的功能是:1) 检测前调整试件的空间位置,保证试件的旋转轴线与电动旋转台的旋转轴线重合;2) 保证激光位移传感器能够获得正确的检测数据。
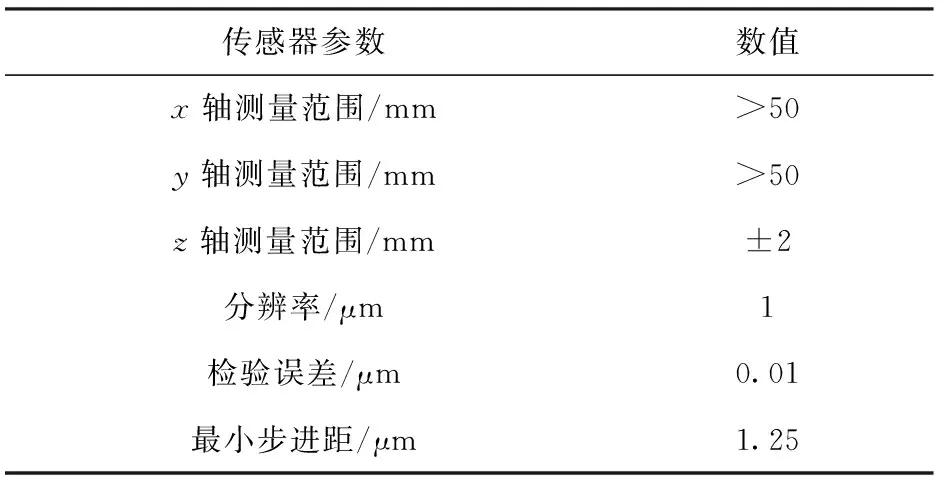
表1 单点痕迹激光检测装置参数

图2 试件空间位置五轴调整单元Fig.2 Five-axis adjustment unit for specimen position
摄像机与激光位移传感器位置调整单元(见图3)由电动升降台和电动平移台构成,电动平移台安装在电动升降台的升降部件顶部。通过分别控制电动升降台和电动平移台的步进电机运动来控制摄像机与激光位移传感器的升降与平移,其作用是调整激光位移传感器的检测位置和CCD高速摄像机之间的焦距。
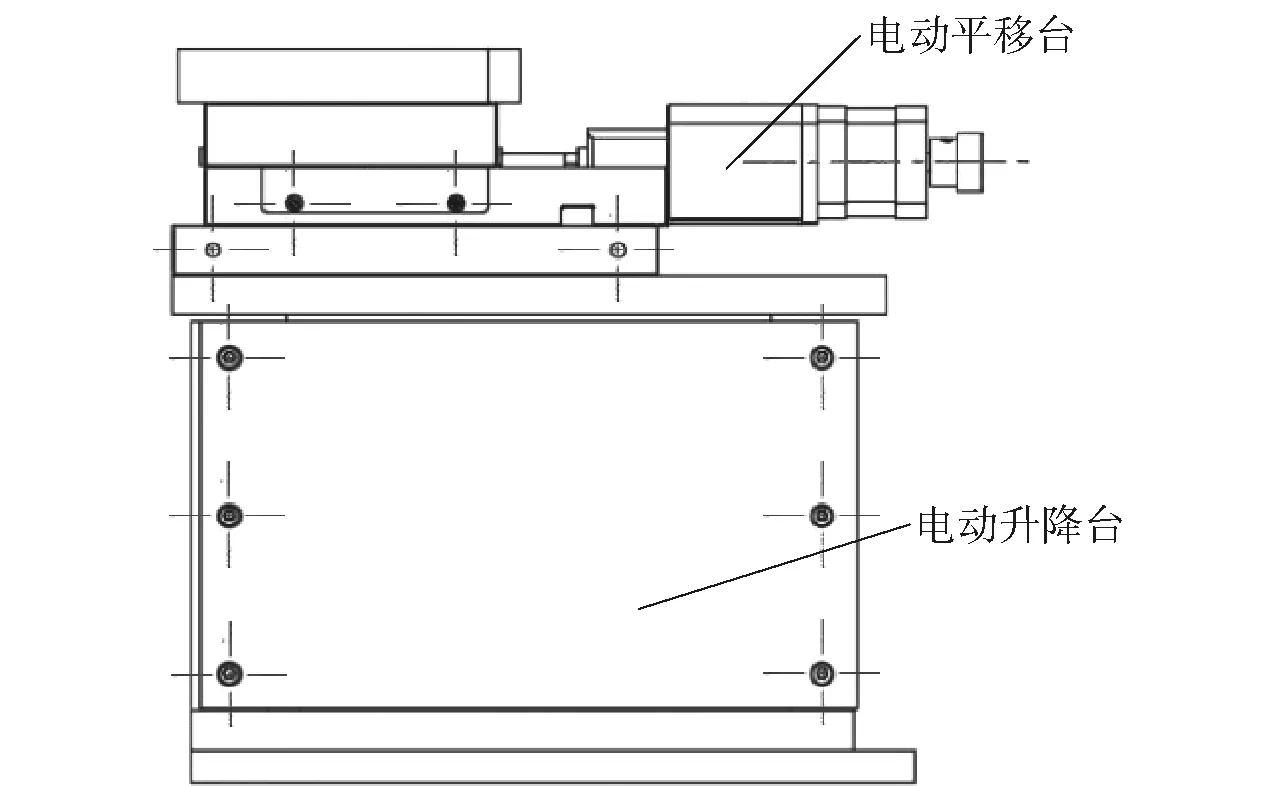
图3 摄像机与激光位移传感器位置调整单元Fig.3 Position adjustment unit of camera and laser displacement sensor
检测前,首先将被测弹头放置在试件座上,通过控制试件空间位置五轴调整单元的5个载物台步进电机运动来控制试件平移、摆动和旋转,进行相应5个方向上的位置调整,直至被测弹头的圆心中心线与电动旋转台的旋转中心线重合。然后通过摄像机与激光传感器位置调整单元来调整激光位移传感器与弹头表面之间的距离,确保检测数据准确。
检测时,被测弹头随电动旋转台做匀速转动,激光位移传感器拾取激光点与弹头表面圆周方向上的距离变化数据。每检测一周,通过控制电动升降台的抬升或下降使得激光位移传感器移动一定高度,再开始新的环绕检测过程。
1.2 检测方法
1.2.1 弹头圆心位置调整
保持检测弹头与电动旋转台同轴,设激光传感器到弹头表面的垂直距离为L,到电动旋转台轴心的距离为H,弹头圆心至电动旋转台轴心距离为δ,弹头半径为r,电动旋转台轴心与弹头表面的垂直距离为s,α为弹头旋转角度,α为0~2π rad,正负由电机安装在x轴的正反方向确定,具体如图4所示。

图4 检测弹头与电动旋转台同轴调整示意Fig.4 Schematic diagram of coaxial adjustment of detected bullet and electric rotating table
一般情况下,弹头放置在夹持装置上时,弹头的圆心无法与检测平台的旋转中心完全重合。则弹头旋转一周,激光位移传感器与弹头表面之间的距离L是变化的。
由余弦定理得
r2=s2+δ2-2sδcos(α+π/2),
(1)
由二元一次方程求根公式得
(2)
(3)
当弹头圆心与检测平台的旋转中心不重合时,实际拾取得到的激光位移传感器与弹头表面之间的距离变化曲线如图5所示。
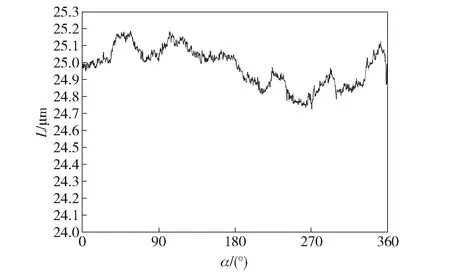
图5 不同心时激光位移传感器与弹头表面之间的距离Fig.5 Distance between the laser displacement sensor and the surface of bullet
此时,由于偏心距δ的存在,检测信号存在变形,不能准确地表示出弹头表面痕迹的准确信息。
因此在正式进行数据检测之前,必须对弹头的位置进行自动调整,保证弹头圆心与电动旋转台轴心基本重合,具体调整步骤如下:
1)放置好弹头,利用视频图像通过控制程序界面上的相关控制按钮进行粗调;
2)自动调整。计算机控制检测平台旋转一周,得到距离变化曲线,根据该曲线数据可以计算出弹头偏心距离δ,再根据该偏心距离δ,通过两个相互垂直布置的步进电机平移弹头夹持平台,对弹头位置进行自动调整;然后重复数据采集并重复调整位置,直至δ值达到所设定的阈值为止。
弹头圆心位置调整完毕后得到的检测数据曲线如图6所示。此时,检测获得的距离曲线整体趋势上是平直的,较好地体现了枪弹膛线痕迹特征。
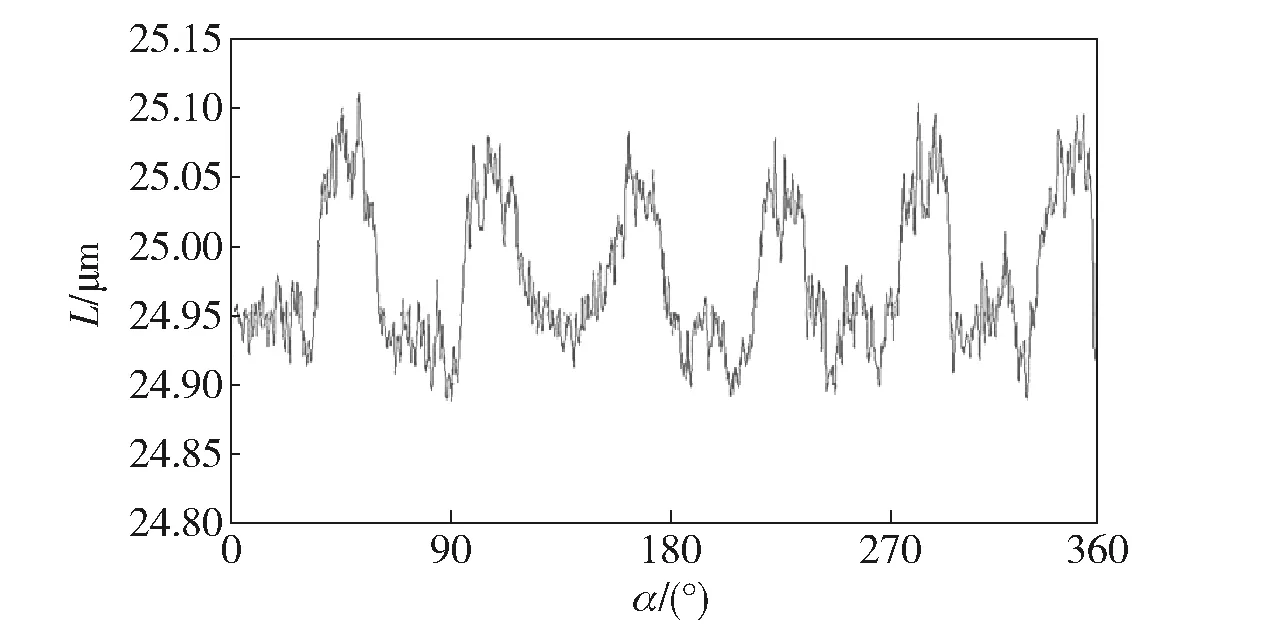
图6 弹头断面圆心与旋转中心重合时检测数据曲线Fig.6 Detection data curve when the center of the bullet cross-section coincides with the center of rotation
1.2.2 弹头圆柱轴线位置调整
在进行检测之前,还需要对弹头圆柱轴线的姿态进行调整。如图7(a)所示,如果被测弹头的圆柱轴线与检测平台的旋转轴线不重合,弹头旋转一周,激光距离传感器检测的路径实际是一个椭圆,不能准确地获得弹头膛线痕迹数据。因此必须进行弹头圆柱轴线位置调整。具体调整步骤是:
1)按前述步骤先把图7所示的弹头圆心调整到检测平台的旋转中心;
2)轴向移动激光传感器,移动距离为h,检测断面圆周数据,计算得到轴线偏转角度da;
3)根据da值,通过步进电机来控制两个相互垂直布置摆动载物台的摆动来调整弹头的轴向姿态,直至弹头的轴线与旋转载物台的轴线基本平行(见图7(b));
4)再次平移弹头,完成两轴线重合(见图7(c))。

图7 弹头圆柱轴线调整Fig.7 Bullet cylinder axis adjustment
实际被测弹头完成圆心调整和轴线调整后的状态如图8所示。

图8 弹头调整完成后状态Fig.8 Bullet after adjustment
2 匹配算法研究与实现
2.1 信号预处理
2.1.1 数据叠加
被测弹头作360°匀速转动,激光位移传感器弹头圆柱表面到激光头之间的距离进行连续检测,图9是采集到的一个9 mm弹头膛线痕迹原始数据曲线图,从图9中可以清楚地看到该弹头表面存在6条膛线痕迹。

图9 9 mm弹头的膛线痕迹原始检测数据曲线图Fig.9 Original detection data curves of rifling traces on 9 mm bullet
由于采样设备使用的是点激光位移传感器,单条数据往往不能准确地反映被测弹头表面的膛线痕迹特征。经过反复测试,沿被测弹头轴向一定距离内采集10~20条圆周方向上的膛线痕迹数据,将这些数据进行降噪和对齐及加权平均,最后得到该弹头的膛线痕迹平均曲线,图10所示曲线就是按上述方法处理得到的弹头膛线痕迹平均曲线。
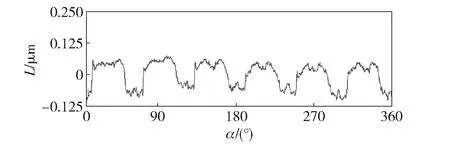
图10 弹头膛线痕迹平均曲线Fig.10 Average curve of bullet rifling traces
2.1.2 干扰数据去除
在图6所示的弹头痕迹平均曲线中,占主导地位的是射击过程中6条膛线对弹头刮擦挤压造成的痕迹。这样的明显主痕迹可以用于区分射击枪支的种类,但对于在同类枪支中溯源弹头所属枪支用处不大,因为同一类枪支击发的弹头,膛线所产生的主痕迹线形均是相似的。因此,需要将弹头膛线痕迹平均曲线中的膛线主痕迹先行滤除,再进行比对计算。
不同于传统形态滤波算法,本文采用具备较高准确性和较好鲁棒性的广义形态滤波对信号进行滤波,其级联的结构元素级为不同尺寸[15]。设f(n)为定义在整数数组F=(0,1,…,N-1)上的离散信号,N为滤波数据点数,结构元素分别为g1(n)和g2(n),则广义形态开—闭和形态闭—开滤波器分别定义为
GOC(f(n))=f(n)∘g1(n)·g2(n),
(4)
GCO(f(n))=f(n)·g1(n)∘g2(n),
(5)
式中:·为开运算;∘为闭运算。
由(4)式、(5)式可知,广义形态滤波仍由形态开、闭运算构成,在很多情况下会造成统计偏倚,因此可将两种广义形态滤波器加权组合使用,即

(6)
形态滤波滤除信号能力强弱与结构元素的复杂程度呈正比,结构元素越为复杂,则其运算时间也会相应增长。考虑到激光检测信号为一维信号,因此采用实现较为简单,且能较完整保留信号形状特征的直线结构元素进行广义形态滤波,其具体幅值根据实际情况选定。
按广义形态处理方法自动构造出的膛线主痕迹曲线如图11所示。
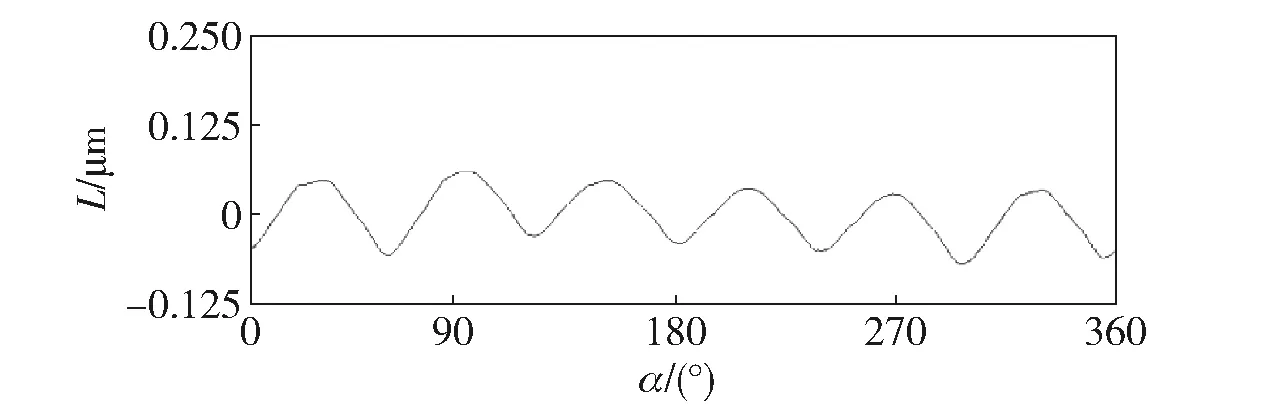
图11 按形态学处理方法自动构造出的膛线主痕迹曲线(相位取反)Fig.11 Main trace curve of bullet rifling automatically constructed according to the morphological processing method (inverted phase)
将膛线主痕迹曲线作相位取反与弹头膛线痕迹平均曲线作加运算,即可得出滤波后痕迹曲线。图12为经滤波后的弹头膛线痕迹曲线,由于经形态滤波后的膛线痕迹曲线较多地保留了单个枪支独有的次生痕迹信息,将更有利于在同类枪支中匹配查找同一支枪支发射的弹头。

图12 经滤波后的弹头膛线痕迹曲线Fig.12 Curves of bullet rifling traces after filtering
2.2 相似度比对
检测数据经预处理之后,即可进行相似度比对计算,相似度计算一般选用的距离函数有欧氏距离、K均值等[19]。经多次实验,最终选择皮尔逊相关系数进行痕迹特征数据的相似度比对计算,设2个痕迹检测数据数组分别为l1和l2,皮尔逊相关系数为rp,则其定义为
(7)

拾取的弹头膛线痕迹数据为封闭圆周上的数据,因此在进行比对计算时,在应用(7)式计算出第1个相似度数值后,可固定一组数据,另外一组数据逐点头尾移动,反复计算两组数据的相似度,直至全部计算完成后,将两组数据之间的最大相似度值作为最终计算结果,即每组弹头痕迹相似度计算次数与采样数据点数相同。图13是两组痕迹数据一对一匹配的结果,红色为痕迹1,蓝色为痕迹2,由图13中可以看出,两组痕迹基本重合,相似度达到91.25%.
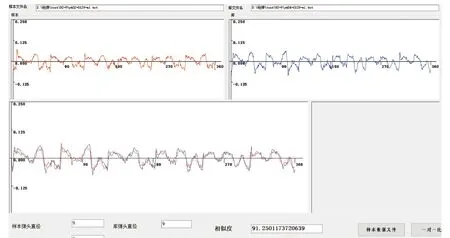
图13 两组痕迹数据一对一匹配结果Fig.13 Results of one-to-one matching of two sets of trace data
更为普遍的应用场景是一对多匹配计算,即用一组现场检测数据与数据库中已有的多条数据逐条进行匹配计算,最终按相似度值的大小排序输出计算结果,如表2所示。
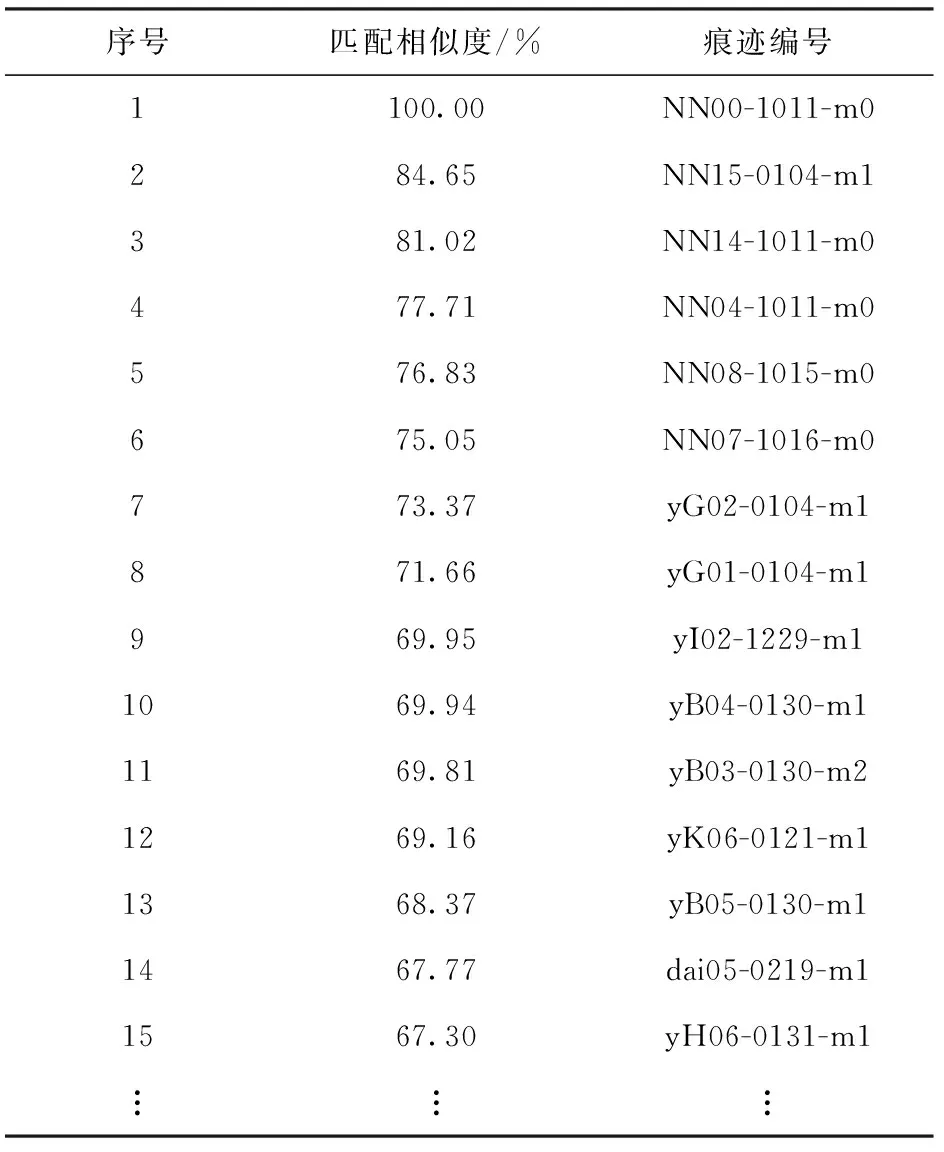
表2 现场检测痕迹数据与数据库中多条痕迹数据匹配相似度排序
2.3 采样数据点确定
检测采样数据点的选取十分重要,数据点过少无法真实地反映弹头表面膛线痕迹特征;反之如果数据点过多,会耗费太多的采样及比对时间,占用过多的计算机存储空间。
进行不同采样数据点的检测试验,以确定合适的检测采样数据点数。实验用的两个9 mm弹头旋转一周,分别采集2 870点、3 782点和5 740点数据,检测时间分别为44 s、62 s和88 s,数据文件的大小分别为25 kB、40 kB和50 kB. 进一步对不同数据点的匹配精度和耗时进行比较,结果如表3所示。
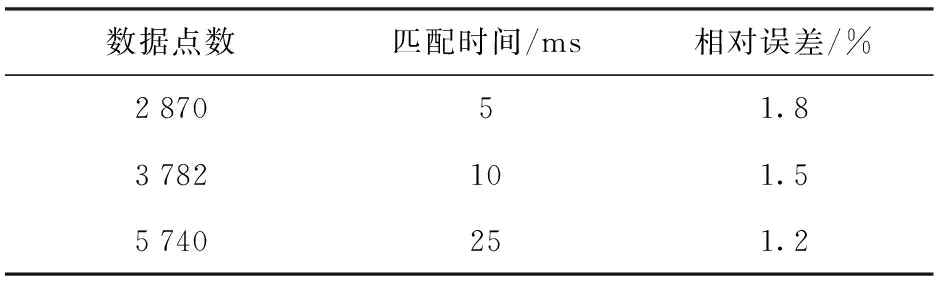
表3 不同数据点匹配耗时及相对误差
由表3可知,数据点增加一倍,数据的匹配结果相对误差小于1%,但匹配耗时增加5~10倍,因此,决定将最终的采样点数设置为每圆周2 870点。
3 实验验证
为贴合实际枪支建档的要求,选用公务用枪常用的92式手枪、59式手枪、77式手枪和64式手枪击发弹头进行匹配实验。
3.1 92式手枪弹头痕迹匹配
参与匹配试验的92式手枪弹头主要由某省公安厅、某市公安局和某兵工厂提供,其中某省公安厅提供了13支枪击发的78发弹头,某市公安局提供了1支枪击发的4发弹头,某兵工厂提供了1支枪击发的6发弹头,共计有15支枪击发的88发9 mm弹头。按第1节所述方法对弹头表面膛线痕迹进行环绕检测采集,经处理形成待测样本库,选择其中的1发弹头痕迹与样本库中痕迹数据进行一对多匹配计算。
此处设定:同一支枪所击发的6发弹头检测数据匹配排序全部位于前10%,则该匹配结果为优秀;有4发弹头检测数据匹配排序在前10%,则该匹配结果记为良好;有3发弹头检测数据匹配排序在前10%,则该匹配结果记为及格;其余记为不及格。
整个匹配过程耗时1 s,匹配结果如表4所示,匹配合格率约为87%.
使用参考文献[9]中的方法与本文提出算法进行比较:首先,将相同一维激光检测信号的主分量分析特征提取为要测试的样本,随后,基于核函数和保形预测理论的支持向量机模型构建监督学习模型,以将每个文件分类为具有指定置信度的特定样本,进行分类和匹配,整个匹配过程耗时10 s,匹配结果如表5所示。遵循相同的规则,匹配合格率约为73%.

表4 使用本文算法得到的92式手枪弹头匹配结果
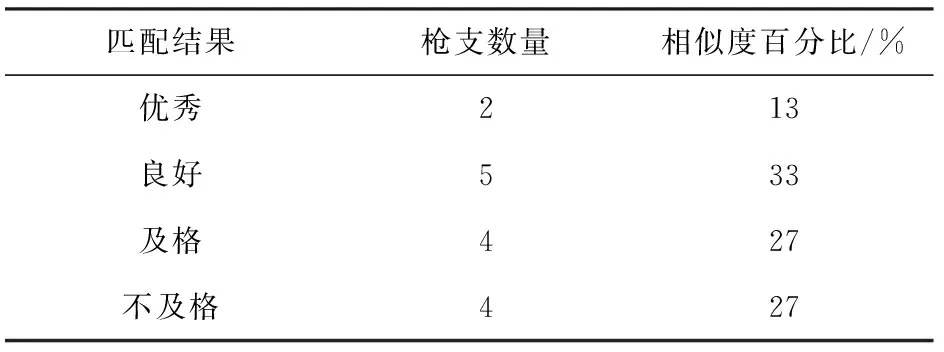
表5 使用文献[9]中方法得到的92式手枪弹头匹配结果
3.2 59式手枪弹头膛线痕迹匹配
参与匹配试验的弹头由某市公安局提供。每支59式手枪击发4发子弹,共计有30支枪击发的120发9 mm弹头。枪支编号为S01~S30,每支枪击发的弹头编号是1~4. 按第1第所述方法对弹头表面膛线痕迹进行环绕检测采集,经处理形成待测样本库,选择其中的1发弹头痕迹与样本库中痕迹数据进行一对多匹配计算。
此处设定:同一支枪击发的4发弹头检测数据匹配排序全部位于前10%,也就是前12位的,则该匹配结果为优秀;有3发弹头检测数据匹配排序在前10%,则该匹配结果记为良好;有2发弹头检测数据匹配排序在前10%,则该匹配结果记为及格;其余记为不及格。
整个匹配过程耗时2 s,匹配结果见表6,匹配合格率约为97%.
同样,使用参考文献[9]中方法与本文提出算法进行比较,整个匹配过程耗时20 s,匹配结果如表7所示。遵循相同的规则,匹配合格率约为77%.

表6 使用本文算法得到的59式手枪弹头匹配结果
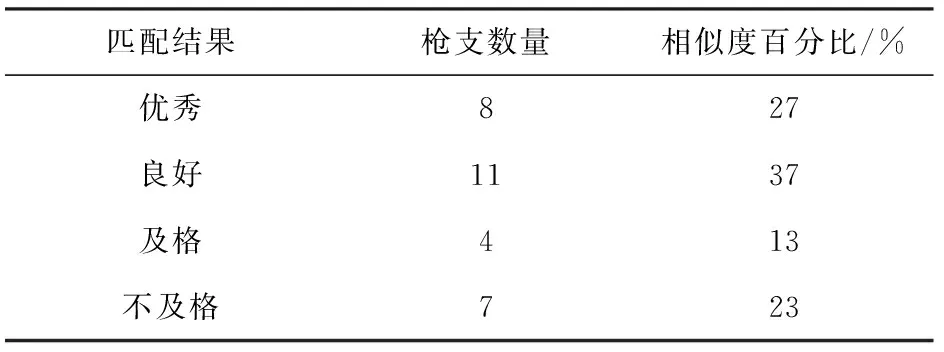
表7 使用文献[9]中方法得到的59式手枪弹头匹配结果
3.3 7.62 mm步枪弹头痕迹匹配
参与匹配试验的弹头由某市公安局提供,其中:22支77式手机枪击发的弹头101发;2支64式手枪击发的12发弹头。参与匹配测试的7.62 mm弹头共计有24支枪击发的113发弹头。按第1节所述方法对弹头表面膛线痕迹进行环绕检测采集,经处理形成待测样本库,选择其中的1发弹头痕迹与样本库中痕迹数据进行一对多匹配计算。
此处设定:同一支枪击发的所有弹头检测数据匹配排序全部位于前10%,也就是前10位的,则该匹配结果为优秀;同一枪支75%的弹头检测数据匹配排序在前10%,则该匹配结果记为良好;50%的弹头检测数据匹配排序在前10%,则该匹配结果记为及格;其余记为不及格。
整个匹配过程耗时2 s,匹配结果如表8所示,匹配合格率约为100%.

表8 使用本文算法得到的7.62 mm步枪弹头匹配结果
同样,使用参考文献[9]中提到的方法与本文提出算法进行比较,整个匹配过程耗时19 s,匹配结果如表9所示。遵循相同的规则,匹配合格率约为82%.
综上,参考文献[9]中提出的算法处理弹头痕迹数据时准确性和速度较低、稳定性较差。相反,本文提出的算法在计算精度、稳定性和效率方面具有明显的优势。

表9 使用文献[9]中方法得到的7.62 mm步枪弹头匹配结果
4 结论
本文提出了一种基于单点激光检测的枪弹弹头快速匹配系统。该系统首先利用激光位移传感对枪弹弹头表面膛线痕迹沿圆周方向进行360°快速检测,检测数据经降噪后进行相似度匹配计算,从而快速准确地对不同弹头及枪支的相关性做出客观判断。利用该系统对共计69支不同枪支击发的321发弹头进行了膛线痕迹匹配,匹配优良率均达到80%以上且匹配速度较快。实验结果表明本系统具有检测精度高、匹配速度快、对弹头表面纹理无破坏等优点,既可以用于弹头之间的一对一数据匹配,也可用于一对多数据匹配,可以有效应用于枪支批量建档和确定作案枪支的作业之中。
但在实际应用中仍存在以下问题需要进行深入研究[17-19]:
1)本系统检测精度虽然能满足匹配要求,但还需要进一步的研究如何提高检测与匹配效率,如将信号转化到变换域,提高计算速度,进一步提高匹配精度。
2)对二维、三维融合算法进行深入研究,将激光传感器检测获得的数据与弹头表面展开图像数据进行融合,可提高匹配精度,在后续的研究过程中可以进行基于特征的数据融合算法,进一步提高系统的匹配精度和匹配效率。
3)由于我国在公务用枪弹痕数据库方面的研究接近空白,因此本系统在测试过程中可供选用的样本较少,只是以可以收集到的部分弹头进行了相关的实验,实验结论是否适用于其他枪支还有待进一步的验证。
猜你喜欢
兵工学报(2022年9期)2022-10-11
小猕猴智力画刊(2019年3期)2019-04-19
文苑(2018年18期)2018-11-08
文萃报·周五版(2018年36期)2018-07-13
环球时报(2018-05-14)2018-05-14
世界知识(2018年6期)2018-04-23
飞碟探索(2013年2期)2013-08-13