基于主动行车安全的智能诱导系统在多雾山区高速公路上的应用
2021-03-15 12:07张春声
广东公路交通 2021年1期
张春声
(广东省公路建设有限公司, 广州 510623)
0 引言
高速公路遇多雾异常特殊天气时,极易发生交通事故,尤其局部路段出现浓雾的危险性更是许多重大安全事故的诱因。从正常路段高速驶入浓雾区,由于能见度的突变,视野变得迷糊,交通警示标志和防护栏难以辩识,驾驶者很容易发生判断和操作失误,引起追尾、碰撞护栏等交通事故。根据运营高速公路事故统计,雾区高速往往成为事故多发或频发路段,因多雾影响导致多车连续追尾的重大交通事故时有发生。目前,大多数雾区路段仅采取在路侧增加“雨雾天气、谨慎驾驶”等警示标志,无法对雾区路段进行主动管控。
基于主动行车安全的智能诱导系统通过路侧气象站获取天气状况,结合车辆检测器获取的雾区路段车流量数据进行分析,在出现能见度低于阈值、事故、拥堵等状况时在监控中心平台自动发起告警,并联动视频投屏。监控人员确认后,可选择预案启动设备联动,通过雾灯诱导系统强化道路轮廓、诱导车辆安全行驶,并通过情报板、广播系统向过往司乘人员进行交通信息提示和交通管控,可有效降低通行雾区高速公路的风险。
1 系统设计
智能诱导系统前端设备(主要是气象检测器、能见度检测器、透雾摄像枪、雷达事件检测、车检器等)通过对高速公路雨、雪、雾、冰等恶劣天气全方位、立体式的检测,检测数据经通信网络传输至路段监控平台,进行数据分析和处理。结合雾区路段交通运行状况,系统平台自动调用策略对前端设备进行控制,当发生紧急情况时,采取全面的应对措施,如交通诱导、信号控制、广播警示、行车高速警告等外场设施综合联动,达到雾区通行安全主动预防的效果(图1)。
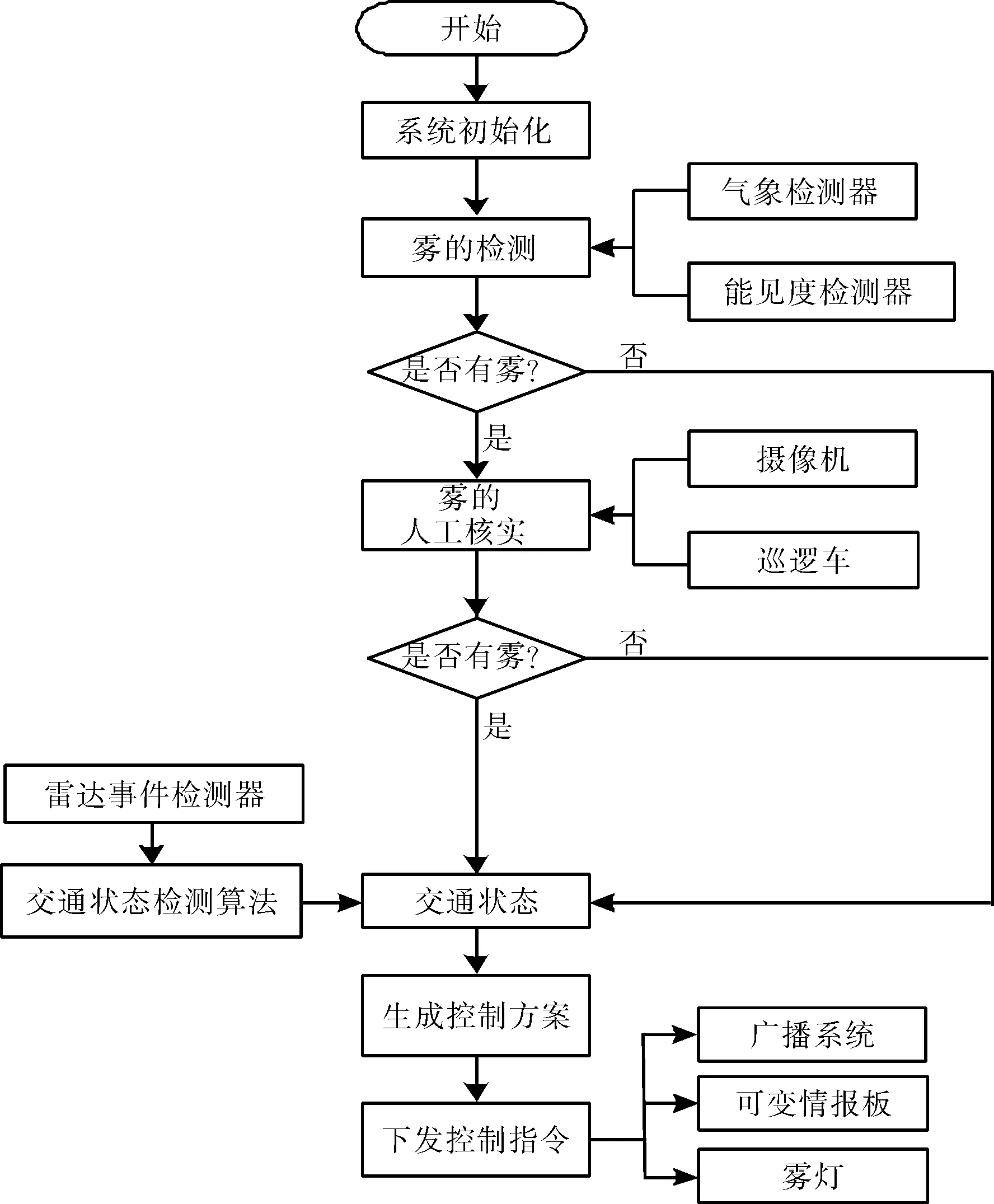
图1 雾区路段智能诱导系统工作流程
1.1 系统构成
智能诱导系统由前端数据采集设备(主要是气象检测器、能见度检测器、透雾摄像枪、雷达事件检测、车检器等)、信息发布设备(智能诱导雾灯、语音广播系统、情报板等)、数据分析处理系统(雾区监控子系统)、通信传输系统等构成(图2)。

图2 雾区路段智能诱导系统构成
1.2 系统关键设备与选型
1.2.1 外场摄像机
建议采用数字、光学双重透雾功能,摄像机自动探测能见度,低于一定阈值时先启动数字透雾(图像彩色),数字透雾时会根据图像雾感适当增强或减弱除雾强度,当达到数字透雾能力极限,图像雾感仍较重时,自动切换为光学透雾(图像黑白),雾区路段尽量按照1km设置1处进行全覆盖。
1.2.2 气象检测器
气象检测器主要包括气象状况检测探头、数据处理单元、通信控制单元、供电单元。可实时监测能见度、风速风向、雨量、大气压等天气状况。
1.2.3 车辆检测器
采用雷达车辆检测器或微波车辆检测器,可获取车流量、车速、停车、逆行、行人等交通流信息和异常事件。也可以利用主线ETC门架对断面车流、车速等运行状况进行采集。
1.2.4 情报板
按照500m设1处门架式情报板或悬臂式情报板,用于显示前方交通状况和预警信息。
1.2.5 广播系统
结合高速公路已有的语音广播系统平台,在雾区路段适当增加有线广播终端,可用于交通状况的语音提示和预警。
1.2.6 智能诱导雾灯
智能诱导雾灯按照间距30m设1处,安装在路侧护栏或单独设置立柱。如有道路照明,尽量与路灯同杆布设。根据公路物理边界条件(行车道宽度、路肩、护栏和标线等)、车辆通行状况(车速、跟车有效间距)、天气状况(能见度、风速、降雨量、温度等),通过智能诱导雾灯,根据不同工况发出的红、黄信号及不同闪烁频率,帮助提醒司机安全行驶,降低特殊路况和天气下交通事故的发生。应具备以下主要功能:
(1)行车安全诱导功能:雾区安全行车主动诱导、全程同步闪烁、同步闪烁频率可变、动态尾迹显示、尾迹可控、尾迹透雾显示、事故碰撞、施工/事故警示。
(2)无线通信功能:设备间无线通讯、抗损毁。
(3)远程控制功能:上位控制系统与外场设备间的无线通讯、外场流动人员与设备的交互。可根据实时道路天气环境,本地自动联动控制,也具有远程和现场手动控制(手动遥控器)的功能。
1.3 系统主要功能需求
1.3.1 雾灯诱导模式[1]
根据《雾天公路行车安全诱导装置》(JT/T 1032-2016)标准要求,诱导装置组成的诱导系统应具有道路轮廓强化模式、行车主动诱导模式、防止追尾警示模式等工作模式。诱导装置供电要求具备供电容错,当任一诱导装置出现损毁、丢失、自身故障等情形时,不应影响其他诱导装置的正常运行。当电网掉电或者断电时,诱导装置正常工作时间不低于 72h。
1.3.2 碰撞检测
当车辆撞击到护栏时,护栏会产生振动,撞击点附近的智能诱导装置检测到振动事件并上传至预处理器,由预处理器研判碰撞事故的发生,同时上报事件到监控中心告警,此地疑似有事故发生。
1.3.3 视频自动检测
具备交通事件检测和交通参数检测功能。利用以深度学习为核心的视频处理技术及核心算法,对前端设备采集的视频图像进行实时分析,实现对车辆停驶、拥堵、逆行、行人穿越及抛洒物等交通事件的自动检测、报警、传输、记录等功能。可对气象和地质灾害等道路环境变化进行实时检测和报警,并将数据通过网络上传至数据库服务器、综合管理平台以及其它上端系统,为道路交通管理者提供数据依据。
1.4 雾灯诱导系统运行模式
图3为智能诱导雾灯运行流程。

图3 智能诱导雾灯运行流程
根据能见度检测数据,精确判断浓雾程度是否影响行车视距,在交通流正常状况,结合能见度设定的阈值[2],分别启用行车主动诱导、防止追尾警示、道路轮廓强化等模式。拥堵或发生交通事故时,同步启用限速、信息发布等联动措施。
1.4.1 道路轮廓强化模式
用于能见度大于500m轻雾或雨雾工况,诱导灯启用黄灯常亮,提醒驾驶员注意路侧边缘,避免车辆驶出路侧引起事故(图4)。

图4 道路轮廓强化模式
1.4.2 行车主动诱导模式
能见度低于设定的阈值可能会影响行车安全时,诱导灯启用黄灯并同步闪烁,提醒驾驶员注意路侧边缘并适当控制好车速,避免车辆驶出路侧引起事故(图5)。

图5 行车主动诱导模式
1.4.3 防止追尾警示模式
能见度低于设定的阈值会严重影响行车时,通过触发和点亮上游诱导装置的红色警示灯,形成红色尾迹(一般在120m范围内)来警示当前车辆的前方有车辆,从而提醒司机保持安全的行车距离(图6)。
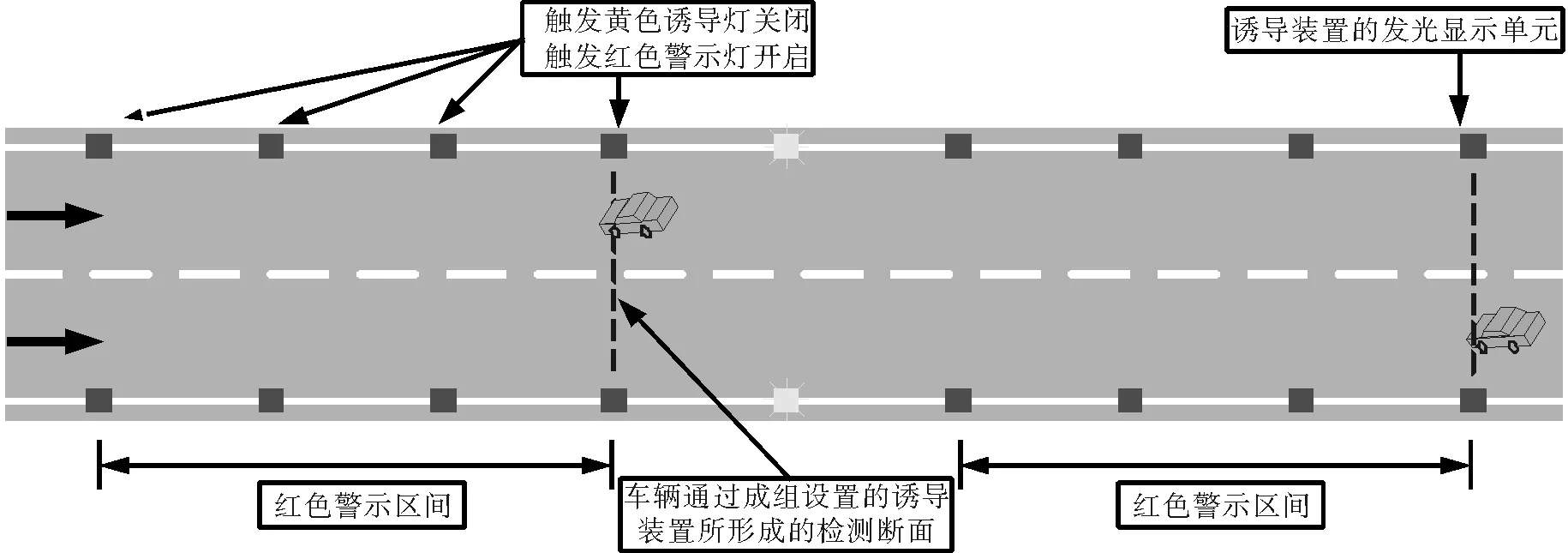
图6 防止追尾警示模式
2 应用案例分析
云茂高速公路位于广东省罗定市、信宜市及高州市,路线起点位于罗定市围底镇,设置寻龙枢纽立交与罗阳高速公路相接,终于高州市荷花镇,与广西浦北至北流(清湾)公路工程对接,主线全长129.816km。项目黄楼隧道至竹瓦林隧道属于雾区路段,且处于长下坡和桥隧结合路段。根据竹瓦岭隧道进口气象站全年24h的监测数据,雨雾天气发生较多,约占全年1/3。该项目主体工程建设的同时,选取一处浓雾最严重的区段 K52+650 至 K59+825实施诱导系统,将雾区预警预报作为监控一体化平台系统的一个子系统纳入管理。细化预警预报子系统结构,充分利用现有建设期气象检测器设备,实现整体联动,核减能见度检测器数量。通过开发云茂高速公路雾区监控子系统平台,针对不同等级制定不同的联动预案,基本实现对雾区行车主动诱导和辅助营运管理的功能。
2.1 系统总体架构
云茂高速公路雾区监控系统主要由基础层、数据访问层、应用支持层、业务应用层、用户访问层等组成。系统总体结构如图7所示。

图7 云茂高速公路雾区监控系统结构
2.1.1 基础设备及数据采集层
通过高速公路沿线布设环境监测设备、监控视频设备、车检器等设施,用于监测和采集路面视频、车流量及车速、气象环境等数据。
2.1.2 网络层
网络层一般指高速公路内部业务专网,一般采用 MSTP 综合业务接入网方案和SDH干线传输网方案,是高速公路收费数据、视频传输通道。具备统一的协议和标准,实现监控一体化平台软件的信息汇聚和交换,为数据管理、业务应用等提供网络通信保障。
2.1.3 服务应用层
以业务处理为导向和数据流向为维度,主要包括GIS地理信息系统、交通监控、综合视频管理、交通事件管理、高可分可视化、设施设备管理、数据分析等子系统,通过数据分析和处理,提供控制策略对外场信息发布或路侧诱导灯等设备进行控制,从而对交通进行有效管控。
2.1.4 界面层
界面层面向营运部门和相关用户,提供PC端、大屏端的一体化操作平台。
2.2 主要技术路线
(1)系统具备开放性和拓展性:采用B/S模式,使用JAVA框架完成开发,方便其他关键子系统接入和系统拓展。
(2)信息多源化和可靠性:通过对外接口获取气象台数据、对内实时收集路侧气象检测仪,多维度分析数据,确保准确对雾区气象数据进行检测和判断。
(3)人机友好型界的系统集成:操作使用的便捷性。采取GIS地理信息系统方式进行GIS应用开发,GIS引擎使用开源地图。以平面和卫星GIS地图展示路段所辖区域的路网、路况及相关的地理信息,并提供个性化的业务集成。以事件全方位进程信息展示,以及处理动作、视频回放、信息发布及可变信息标识运行状态展示、交通流量监测及展示、气象监测等。

图8 雾区诱导系统3D展示
2.3 云茂高速公路雾区监控子系统平台
系统平台以地图界面为操作主页,对雾区路段的气象站、摄像枪、车检器、路侧诱导灯等设施进行管理,设定并配置预警、预测等参数,管理数据(主要是对气象、现场视频的数据采集和处理),结合监控子系统平台算法进行数据统计和分析,判断预警级别并启用相应策略和预案,及时通过监控人员确认后进行信息对外发布或通过路侧情报板、广播显示相关预警信息。
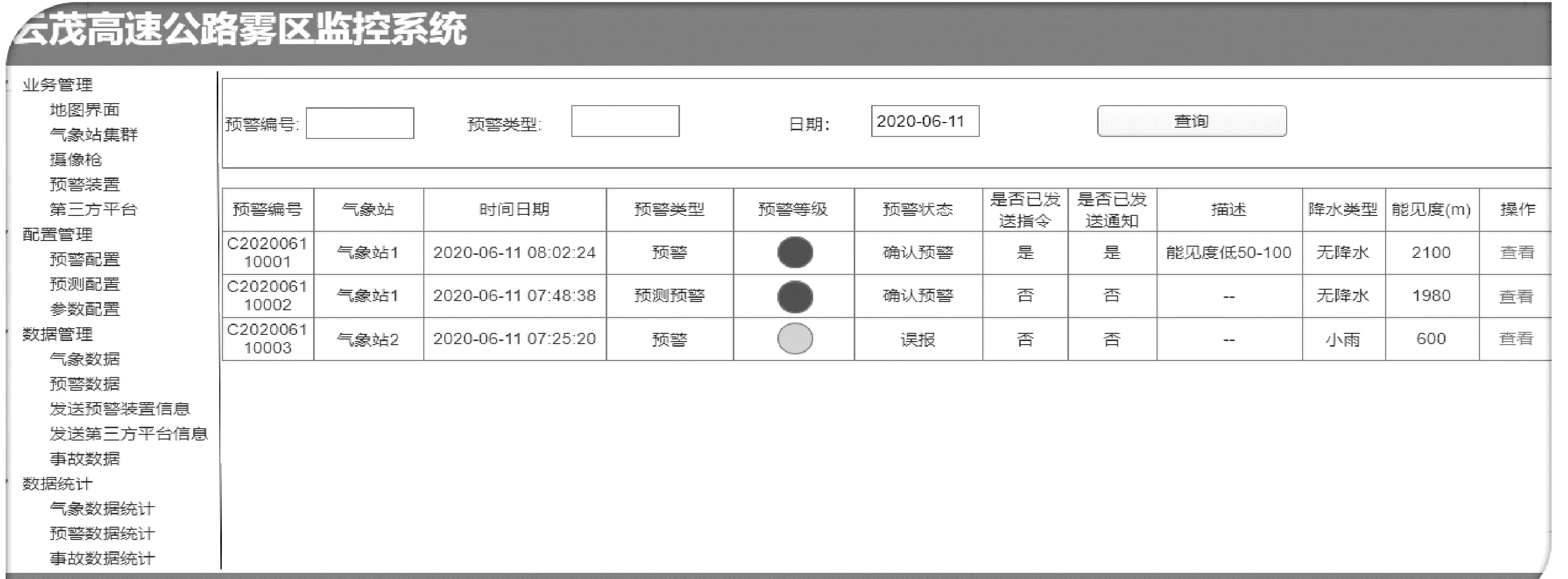
图9 云茂高速公路雾区监控子系统平台操作界面
3 结语
通过建立针对多雾山区高速公路的智能诱导系统,利用高速公路已有的监控摄像枪、车检器、气象检测器等设施和路段监控平台,对路侧诱导灯的闪烁频率和颜色进行控制,通过路侧情报板、广播进行信息发布,实时对行驶的车辆进行预警和主动诱导,提升极端天气下高速行车的道路感知能力,实现了路与车信息交互,是智能交通感知网络在雾区山区高速公路应用的探索。实践表明,降低了雾区高速公路因能见度不足引起的交通事件发生概率,取得了雾区通行安全主动预防的效果。
猜你喜欢
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
汽车与安全(2016年5期)2016-12-01
中国交通信息化(2016年6期)2016-06-06
工业设计(2016年11期)2016-04-16
海洋气象学报(2016年3期)2016-02-28
气象研究与应用(2016年4期)2016-02-27
汽车维修与保养(2015年12期)2015-04-18