基于旋转变换的混沌光学图像加密方法
2021-03-15 08:00:46葛琳琳姜文昊李易霖
辽宁石油化工大学学报 2021年1期
葛琳琳,姜文昊,张 威,李易霖
(1.辽宁石油化工大学,辽宁抚顺113001;2.大连海洋大学,辽宁大连116023)
近年来,光学图像加密技术在光学信息处理中显得尤为重要,它具有计算速度快、光学并行等优点,在信息安全系统中具有广泛的应用前景。目前已经提出了许多光学图像加密方法,例如利用傅里叶变换(FT)、分数傅里叶变换(FRT)和扩展FRT进行光学图像加密的方法[1];利用傅里叶平面上的随机相位掩膜(RPM)的拼图变换(JT)以及加密图像的拼图变换对光学图像进行加密方法[1];基于莫尔光栅、水印、偏振光、像素加扰、无透镜光学安全系统和二进制密钥编码的光学图像加密方法[2];在傅里叶平面中,利用具有夹层扩散器的孔径,提出了二维图像光学加密中的复用方法[2];还提出了基于Ikeda的非线性延迟动力学和光环谐振器的方法[3],以及基于FRT的混沌的加密方法[1]。
基于混沌的加密方法已被用于光通信,混沌函数对初始条件非常敏感,在光学图像加密技术中,使用RPM对图像进行加密,并且必须将整个RPM发送到接收者一侧来对原始图像进行解密。因此,这些方法中的数据安全性变得很差[4⁃6]。
利用旋转变形(GT)对图像进行加密,并且使用混沌函数生成两个RPM,这些RPM被称为混沌随机相位掩膜(CRPM)。该方法中,输入图像在输入平面上乘以第一CRPM,然后在执行第一GT,将得到的输出图像乘以第二CRPM,然后在执行第二GT。处理后在GT平面上获得加密图像,利用Logistic映射、帐篷映射和Kaplan⁃Yorke映射三种混沌函数生成CRPM,并评估均方差(MSE),对所提方法在旋转角度和CRPM的种子方面盲解密的鲁棒性进行评估,并给出加密和解密技术的光学实现方案。
1 旋转变换
GT是一个线性正则积分变换,在相位空间的扭曲位置⁃空间频率平面(xi,qy)和(yi,qx)中产生旋转,带参数旋转角α的二维实函数f(xi,yi)的GT定义为[7⁃8]:

核函数为:

式中,(xi,yi)为输入平面坐标;(x0,y0)为输出平面坐标。
当在Diracδ函数δ(x0-xi)上执行GT时,得到式(2)中的旋转核函数作为输出函数,逆GT的旋转角对应于GT的相反数-α,定义为:

对于α=0,对应于恒等变换;对于α=π/2,以π/2的坐标旋转到正/逆FT;对于α=π,得到逆FT;对于α=3π/2,在π/2的坐标旋转的逆FT,对于旋转角度α的其他值,GT的核函数Kα(xi,yi,x0,y0)具有恒定幅度和双曲相位结构。对GT提出了两种类型的调整。第一种图像旋转是以特定角度在位置和动量平面一起旋转;第二种调整为交叉旋转,在(qx,py)和(qy,px)相空间中执行联合旋转。其中,qx和qy是位置坐标,px和py是动量坐标,GT和FRT的性质有一定的相似性,GT和FRT之间也存在基本差异,因为GT的核函数是双曲波和平面波的乘积,而FRT的核函数是球面波和平面波的乘积。
2 混沌函数
混沌函数用于描述非线性动力系统。混沌函数具有几个有趣的性质,对初始条件非常敏感,这使它在数据安全方法中非常重要。这些函数产生随机迭代值,随机迭代值在边界之间是有限的,迭代值的收敛性在任何迭代值之后都是不可见的[9⁃10]。
本文使用3个混沌函数,第1个混沌函数是Logistic映射,其定义为:

该函数为有界函数,即0<p<4,其迭代形式可以表示为:

以x0为初始值(混沌函数的种子值)。第2个混沌函数帐篷映射定义为:

该函数是有界函数,即0<a≤2,其迭代形式可表示为:

以x0为初始值。第3个混沌函数是Kaplan⁃Yorke映射,其定义为:

该函数也是有界函数,即0≤a≤2和0≤b≤1,其迭代形式可表示为:

以x0为初始值,利用混沌函数生成RPM。Logistic映射和帐篷映射为一维混沌函数,Kaplan⁃Yorke映射为二维混沌函数。对于二维混沌函数,需要2个种子值来产生CRPM,CRPM具有普通PRM无法比拟的优点。在利用RPM的光学图像加密技术中,使用RPM对图像进行加密,并且必须将整个RPM发送到接收方来解密原始图像。因此,这些方法中数据的安全性变得更低,在使用CRPM的光学图像加密技术中,只有称为种子值的初始元素被发送到接收方一侧,而不是发送整个RPM。
3 提出的方法
所提出的加密和解密技术是基于GT和混沌理论,加密和解密过程如图1所示。
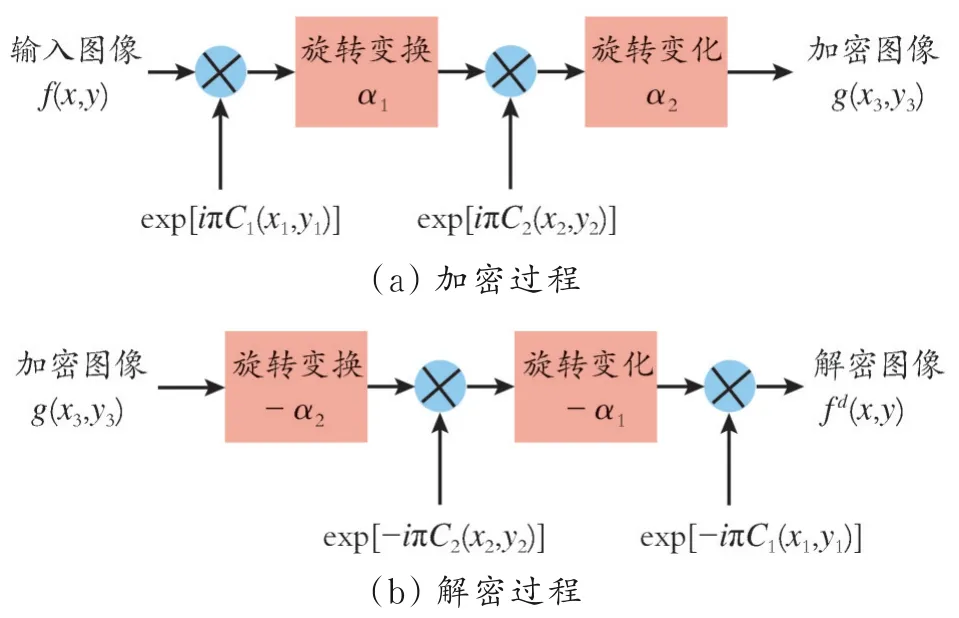
图1 加密和解密过程
执行2次GT,并在中间平面上引入利用混沌函数产生的RPM,旋转角作为图像加密和解密技术的密钥。设f(x,y)为要加密的原始图像,输入图像乘以由相位函数exp[iπC1(x,y)]表示的第1个CPRM,其中C1(x,y)是由混沌函数生成的随机数序列,旋转角α1的第1次GT操作通过式(14)得出:

利用第2个CPRM对第1次GT操作的结果进行编码,第2个CPRM表示为相位函数exp[iπC2(x2,y2)]。其中,C2(x2,y2)是使用不同的种子值获得的第2个混沌函数,然后进入旋转角α2的第2次GT操作,在输出平面上的分布为:
g(x3,y3)=

解密是加密的逆过程,在g(x3,y3)上执行第1个逆GT(GT旋转角度的相反数-α2),然后乘以第2个CRPM的共轭,在得到的输出上执行第2个逆GT,再乘以第1个CRPM的共轭,最后得到解密图像,解密过程表示为:

4 结果与讨论
为了验证所提出方法的有效性,在Matlab平台上进行数值仿真。
利用3个混沌函数产生的CRPM如图2所示。从图2可以看出,每个混沌函数生成具有不同种子值的2个CRPM。Logistic映射产生的CRPM通过式(5)生成,其中第1个CRPM种子值x=0.341,第二个CRPM种子值x=0.241;帐篷映射产生的CRPM通过使用式(9)生成,其中第1个CRPM种子值x=0.610,第2个CRPM种子值x=0.620;Kaplan⁃Yorke映射产生的CRPM通过式(12)—(13)生成,其中第1个CRPM种子值x=0.200 5,y=3 005,第2个CRPM种子值x=0.200 0,y=3 000。
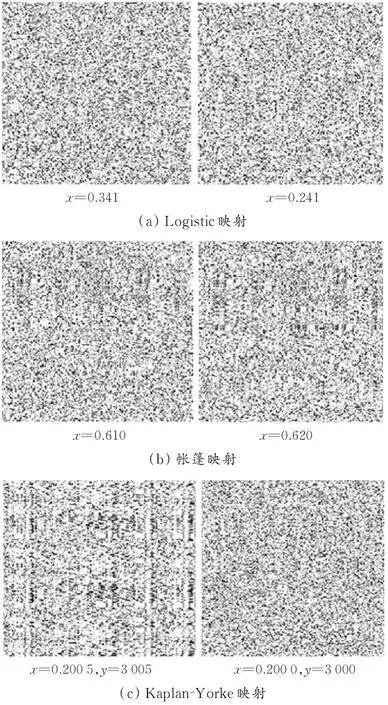
图2 利用3个混沌函数产生的CRPM
GT的数值算法需基于GT的光学设置进行数值模拟。在GT的光学设置中,使用了3个间距固定的广义透镜,利用谱传播方法对自由空间中Fresnel衍射进行模拟,并对广义透镜的作用进行适当的相位调制项。GT算法的性能使用标准的Lena图像进行旋转来检验,振幅数据、相位数据恢复的图像振幅如图3所示。
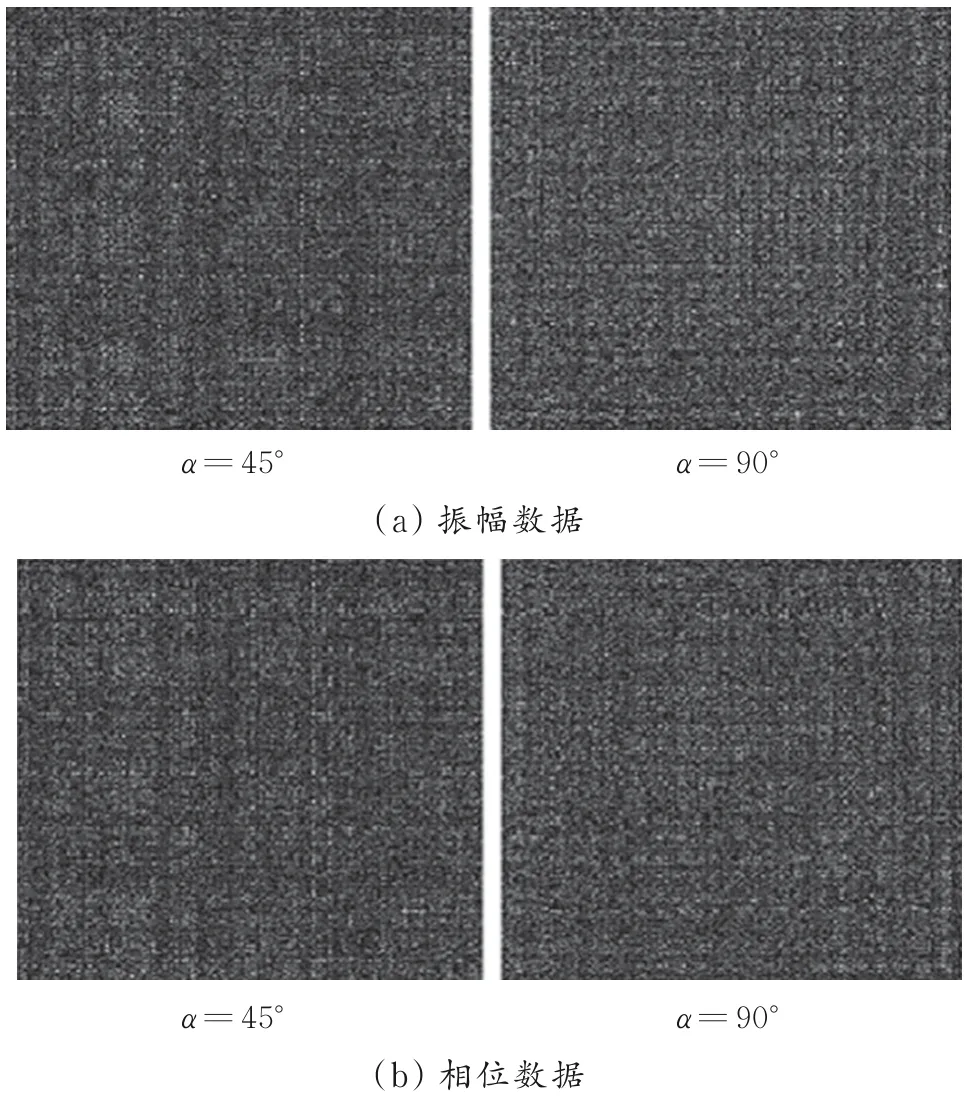
图3 振幅数据、相位数据恢复的图像振幅
图3(a)表示旋转45°和90°的振幅数据重构图像的振幅,图3(b)表示旋转45°和90°的相位数据重构图像的振幅。对于加密和解密过程,第1种GT的旋转角度和第2种GT的旋转角度分别为45°和90°。
利用2种方法来研究不正确的解密过程。3个混沌函数加密图像、解密图像及不正确解密图像如图4所示。第1种方法是解密过程中使用不正确的旋转角度来执行,通过在2个旋转角度中引入0.02°的误差,来计算用于解密系统的不正确的旋转角度;第2种方法是通过交换CRPM在解密过程中的位置来执行。由于混沌函数的CRPM的种子值非常接近,所以采用第2种错误解密方法研究了该技术对种子值的敏感性。
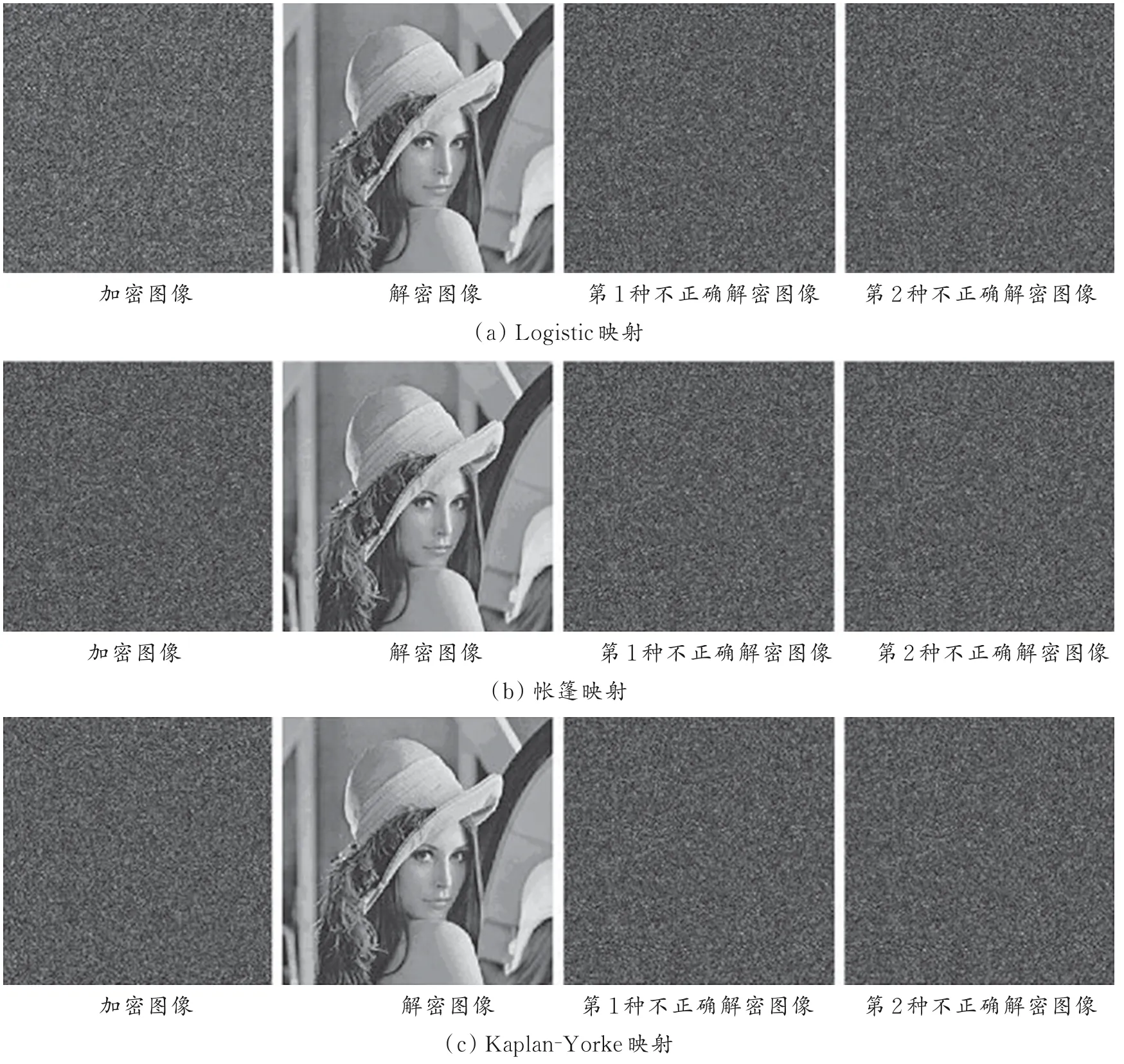
图4 3个混沌函数加密图像、解密图像及不正确解密图像
从图4可以看出,即使旋转角度引入很小误差,也不可能成功解密,因此旋转角度可作为1个密钥;如果2个CRPM的位置互换,则图像解密不成功。因此,混沌函数对于初始条件非常敏感,CRPM的种子值也可以作为1个密钥。
所提方法的性能由数值进行评估,输入图像和输出图像之间的均方差(MSE)经常被用来验证重构图像的质量,其定义为:

式中,I1(i,j)、I2(i,j)分别为输入图像和输出图像在像素(i,j)处的值;N×N为图像的像素总数。
MSE首先利用正确的解密参数来计算,Logistic映射加密图像与原始图像的MSE为3.26×104,解密图像与原始图像的MSE为0;帐篷映射加密图像与原始图像的MSE为3.24×104,解密图像与原始图像的MSE为0;Kaplan⁃Yorke映射加密图像与原始图像的MSE为3.25×104,解密图像与原始图像的MSE为0。
5 盲解密算法的鲁棒性
为了评估算法对盲解密的鲁棒性,计算了解密图像与输入图像的MSE。引入不同误差的解密图像与原始图像的MSE如图5所示。从图5可以看出,在2个旋转角中引入误差b(b=±0.02°)增加了MSE的值。因此,旋转角作为密钥可以保护盲解密的数据源。
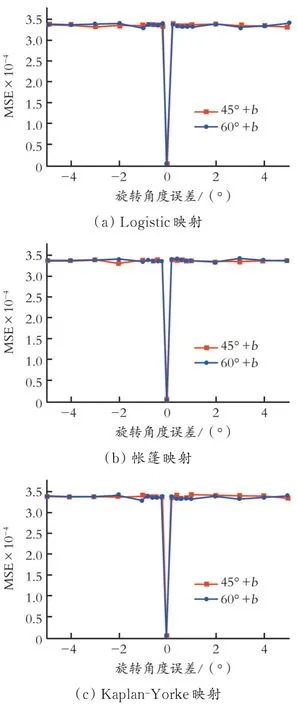
图5 引入不同误差的解密图像与原始图像的MSE
6 所提方法的光学实现
GT可由3个广义透镜和2个固定的只有空间间隔构成的光学系统执行,每1个广义透镜都是由2个相同功率的薄圆柱透镜组合成。第1个和第3个广义透镜是相同的,它们的焦距f等于设置的2个连续广义透镜之间的距离z;第2个广义透镜的焦距f2=z/2,前2个透镜通过相对于彼此旋转来给出旋转角度;第3个透镜是固定的,用于补偿旋转图像不希望得到的相位调制。这种相位调制是通过前2个透镜的旋转而引入,第1个圆柱透镜与垂直轴形成的角度为φ1,第2个圆柱透镜与垂直轴形成的角度为φ2。如果角度φ表示圆柱透镜的对称轴的位置,那么,第1个圆柱透镜的轴与垂直轴形成角度为φ1=-φ,第2个圆柱透镜的轴与垂直轴OY形成角度为φ2,由φ2=-(φ1+π/2)导出。式(1)—(2)中的旋转角度α使用式(18)来计算:

第一和第二透镜的旋转如图6所示。其中,L1和L2分别表示第一和第二透镜。
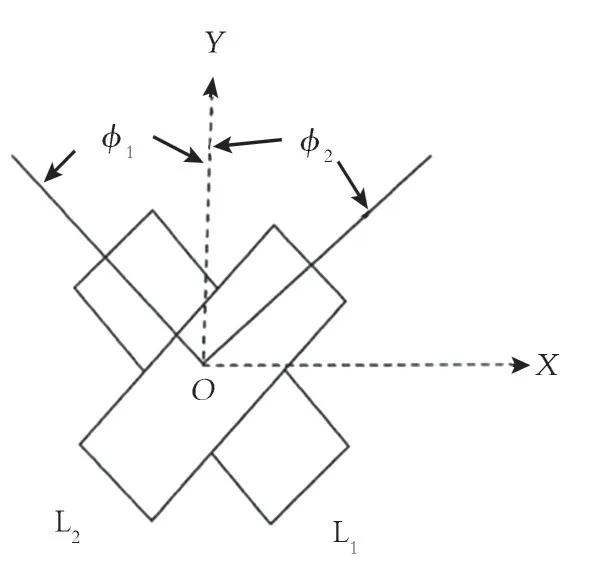
图6 第一和第二透镜的旋转
本文方法的光学实现如图7所示。

图7 本文方法的光学实现
用激光作相干光源,用分束器BS1和BS2将激光分为两部分,分束器的一个臂用作参考光束,另一个臂用作目标光束,R1和R2分别是分束器BS1和BS2的参考光束,M1、M2和M3为3个反射镜,光折变晶体(PRC)用于存储光学数据。在加密过程中,遮光器S1关闭,遮光器S2打开,被加密的图像与第1个CRPM相结合,并显示在第1个SLM1上,用透镜L1、L2和L3来执行第1次GT操作,第2个CRPM显示在第2个SLM2上,用透镜L4、L5和L6来执行第2次GT操作,该图像与参考光束R2结合,存储在PRC中,并记录在电荷耦合器件(CCD1)相机中;在解密过程中,采用相位共轭读出方案,在这个过程中,遮光器S1打开,遮光器S2关闭,光束A2从反射镜M2反射,并作为参考光束R2的共轭,从而产生与图像承载光束A4成比例的光束A3,相位共轭光束同时携带与整个加密图像相关的全部信息,当存储信号的相位共轭通过L6、L5和L4、第2个CRPM和L3、L2和L1时,对记录在CCD2中的图像进行解密,用透镜L6、L5和L4执行第2次逆GT,用透镜L3、L2和L1执行第1次逆GT,在对解密进行输入时必须精确地消除加密过程中引入的相位变化。
7 结 论
提出一种利用旋转变换和混沌加密图像的新思路,当采用不正确的解密过程时,不能成功得到解密图像。对MSE进行了评估,根据盲解密理论,评估了CRPM种子值的初始值和GT的旋转角的鲁棒性,旋转角度作为密钥可以保护数据,在未知种子值的情况下,不能成功地解密图像。CRPM的种子值和GT的旋转角度在盲解密过程可以作为鲁棒的密钥。基于CRPM的加密技术的优点在于,只有混沌函数的种子值可以用于生成解密的CRPM,因此不需要将整个RPM发送到接收方进行解密;二维混沌函数优于一维混沌函数,二维混沌函数需要2个种子值,进一步提高了加密图像的安全性。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:00
科学大众·小诺贝尔(2023年10期)2023-10-20 13:48:41
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:46
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:16
中学生数理化·八年级物理人教版(2021年11期)2021-12-06 06:44:38
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:06
少先队活动(2020年9期)2020-12-17 06:17:31
阅读(快乐英语高年级)(2020年10期)2020-01-08 02:20:31
中国卫生(2014年12期)2014-11-12 13:12:38