基于随机森林算法的在线轨道平面线形判别方法
2021-03-14 10:01:46秦哲杜馨瑜李颖王昊
铁道建筑 2021年11期
秦哲 杜馨瑜 李颖 王昊
1.中国铁道科学研究院研究生部,北京 100081;2.中国铁道科学研究院集团有限公司基础设施检测研究所,北京 100081
铁路轨道的平面线形一般分为直线、缓和曲线、圆曲线三种。在列车动力作用下,曲线轨道的变形不断累积,容易出现方向错乱。为确保行车安全平稳,须定期检查曲线方向,必要时进行曲线整正,使其恢复到原设计位置。轨道平面曲线的稳定性、平顺度和正确的几何形位直接影响到列车的运行速度和运行安全[1-2]。
现有轨道平面线形判别参数可以识别出半径在150~8 000 m的曲线,但对于半径8 000 m以上的曲线须要更换轨道平面线形判别参数[3]。余宁等[4]提出的基于卷积神经网络的铁路曲线特征点检测算法可以进行离线轨道平面线形判别,但无法嵌入到目前实际使用的实时轨道几何参数检测系统GJ⁃6中,不具备现场检测实用性。
本文利用轨道平面线形判别参数与曲线半径之间的关系,针对性地设计多维特征,并设计在线随机森林分类算法嵌入到轨道几何参数实时检测系统GJ⁃6 中,以实现自动切换轨道平面线形判别参数,提高轨道平面线形判别的准确率。
1 轨道平面线形判别方法
1.1 检测系统工作原理
最新研制的数字式轨道检测系统将多个分立式的惯性传感器集成为整体组件,安装于检测梁上,如图1 所示。该系统结构简单,全部采用数字信号进行传输,有效避免了模拟信号在较长传输路径上的电磁干扰,且信号的分辨率显著提高,同时检测精度有所提升[5-6]。

图1 数字式轨道检测系统检测梁及悬挂装置
用于轨道平面线形判别的输入参数为曲率和曲率变化率。数字式轨道检测系统摇头陀螺位于检测梁中心,其输出信号经过抗混叠滤波器后进行0.25 m间隔的空间采样,再经过数字补偿滤波器消除速度对信号的影响,最后计算得到曲率和曲率变化率,计算公式为
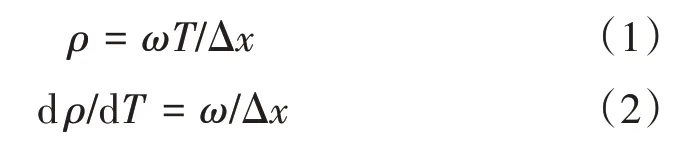
式中:ρ为曲率;dρ为曲率变化率;ω为摇头角速率;T为采样时间间隔;Δx为采样空间间隔。
1.2 轨道平面线形判别
数字式轨道检测系统的轨道平面线形判别方法和关键参数与文献[3]基本一致,其中关键参数为曲率变化跟踪量调整值、曲率变化跟踪量阈值、范围外曲率变化率阈值、范围内曲率变化率阈值。为判别半径R>8 000 m 的轨道平面曲线,须手动切换上述关键参数。为了提高轨道平面曲线判别的准确性与简易性,本文提出使用随机森林算法根据平面曲线半径分类结果对关键参数进行实时切换的方法。
2 随机森林算法的引入
随机森林算法是以决策树为基学习器的集成监督学习算法,其具有一定的抗噪声能力,可以处理非线性数据和高维数据,对数据集的适应能力强,训练速度快,实现简单,精度高[7-8]。基于该算法的曲线半径判别主要包含三个步骤:数据预处理、特征提取、模型训练和测试。
2.1 数据预处理
根据设备台账和轨道几何检测数据匹配曲线的起点和终点里程,生成曲线半径识别标准数据库,流程如图2所示。

图2 生成曲线半径识别标准数据库流程
2.2 特征提取
按150个采样点的长度对每条曲线的检测数据进行分段,对分段后的数据进行特征提取。在不同的曲线半径下,现有平面曲线分段数据(曲率A1和曲率变化率A2)的特征包括:①典型连续数据特征Ac——均值、方差;②典型离散数据特征Ad——上四分位数、下四分位数、中位数、众数、最大值、最小值;③其他特征Ao——熵、偏度系数、峰度系数、线性回归系数。由于这些特征都有显著的差别,故一列特征有12 个特征值,可表示为Ai=[AcAdAo]T。根据经验,设计并引入曲率一阶差分A3、曲率变化率一阶差分A4、曲率+曲率变化率A5三列特征,共计五列特征60 个特征值,可表示为A=[A1A2A3A4A5]。
按分段数据所属半径类别对其进行标注,从0 开始,依次递增。三类平面曲线(R≤3 000、3 000 <R≤8 000、R>8 000)的类别标签分别是0、1、2;六类平面曲线(R≤1 000、1 000 <R≤3 000、3 000 <R≤5 000、5 000 <R≤8 000、8 000 <R≤15 000、R>15 000)的标签分别是0、1、2、3、4、5。
2.3 模型训练和测试
对数据特征进行随机划分,70%做模型训练,剩余30%做测试。模型训练和参数寻优实现过程如下。
1)从原始训练集中使用自助法(Bootstrapping)有放回地随机取出m个样本[9],共进行Ntree次采样,生成Ntree个训练集,对应随机森林中Ntree颗决策树;
2)对Ntree个训练集分别训练决策树模型;
3)对于单颗决策树,假设训练样本特征的个数为n,那么每次分裂时根据信息增益、信息增益比或Gini指数[10]选择最好的特征进行分裂;
4)对于每棵树都要依次分裂下去,直到该节点的所有训练样本都属于某一类;
5)将生成的多颗决策树组成随机森林。
最终随机森林的分类实际上是多棵树分类器投票决定的分类结果。随机森林构建过程中须设置几个关键参数,主要包括决策树个数、最大树深度、叶节点最少样本数、分裂时最大特征数等。这些参数的选取对进一步提升分类性能具有重要作用,选取顺序如下。
1)调整既不会增加模型复杂度又对模型影响最大的参数Ntree,通过学习曲线寻找最佳参数;
2)调整最大树深度,通过网格搜索或学习曲线判断;
3)依次对其他参数进行寻优。
为增加模型的鲁棒性(robustness),设计并实现了增量训练[11]。基于某个训练好的模型,让模型在原有结构不变的基础上新增对新轨道数据的特征表达。增量训练过程的实施步骤如下。
1)选择一个基于不同轨道数据训练好的模型;
2)对新增轨道数据进行分段和特征提取;
3)把新增轨道的特征作为训练集,在已有模型的结构上进行再训练,让模型添加对新增数据的表达;
4)保存增量训练后的模型。
3 应用测试
3.1 离线测试
用离线测试来验证模型分类的准确率。基于同一线路数据的内部测试结果见表1。其中,Z160、K120、G250、K160、G200 分别代表所选取的160 km∕h铁路干线、120 km∕h 铁路线路、250 km∕h 客运专线、160 km∕h 客运专线、某200 km∕h 客运专线;准确率是200 次随机测试的平均值。由于K120 在三分类中都属于第一类,故不做三分类测试。
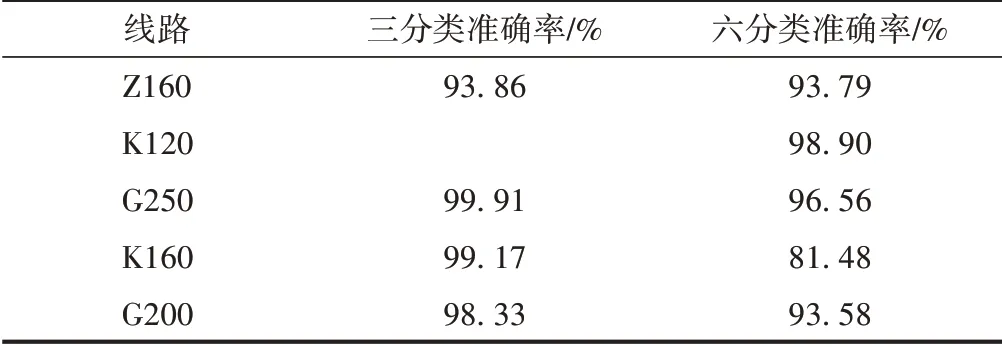
表1 同一线路数据内部测试结果
融合不同线路进行增量训练测试,内部测试结果见表2。其中准确率是200 次随机测试的平均值。可以看出,三分类的准确率较高,均大于90%。

表2 多线路数据融合内部测试结果
3.2 在线测试
由于离线测试结果显示三分类的准确率较高,将训练好的三分类模型嵌入到轨道检测系统轨道几何参数实时处理软件中,使系统在运行过程中每150 个采样点输出一次曲线半径分类结果,并根据分类结果自动改变轨道平面线形判别关键参数。每个分类结果对应的关键参数见表3。
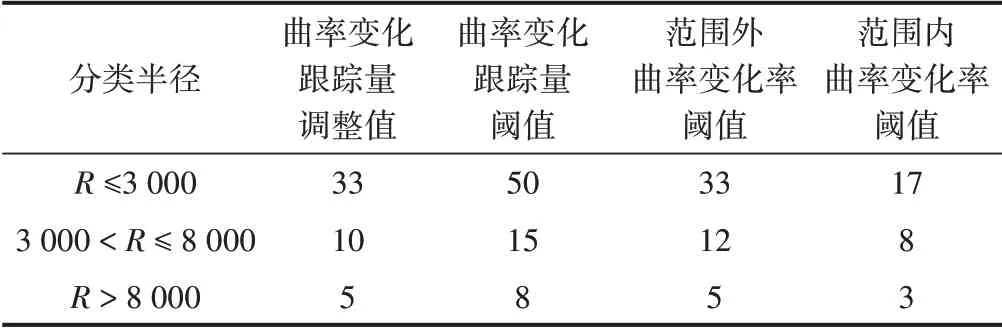
表3 分类结果对应的关键参数
选取某200 km∕h 客运专线K8—K80 区段的检测数据,利用基于随机森林算法的轨道平面线形判别方法在GJ⁃6 型轨道几何参数实时检测处理软件中进行测试,并与按照现有轨道平面线形判别方法得出的检测结果进行对比,结果见图3。可以看出:根据设备台账数据,该区段线路中轨道平面曲线半径在1 200 ~12 000 m,共12 条;现有轨道平面线形判别方法仅能识别5条曲线,难以判别出R>6 000 m的曲线;基于随机森林算法的轨道平面线形判别方法能够判别出全部12条曲线。

图3 基于随机森林算法的在线轨道平面曲线判别结果
4 结语
本文提出了基于随机森林算法的在线轨道平面线形判别方法,其在方法上的创新主要体现在设计并提取针对性的特征,离线识别准确率提升至90%以上;在应用上的创新主要体现在该算法可以嵌入目前的实时轨检系统GJ⁃6中,实现了轨道平面线形判别关键参数的自动切换,能够判别出所有曲线。在测试过程中发现原算法与新算法都存在轨道平面曲线半径大小计算不准确的问题,下一步应结合轨道检测系统超限判断算法进行深入研究。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:26
数学物理学报(2022年4期)2022-08-22 04:07:52
铁道建筑技术(2021年3期)2021-07-21 08:30:02
西部交通科技(2021年9期)2021-01-11 18:28:15
数学物理学报(2019年5期)2019-11-29 07:46:28
试题与研究·高考数学(2016年1期)2016-10-13 10:40:58
肇庆学院学报(2016年5期)2016-03-11 18:09:18
中国塑料(2015年1期)2015-10-14 00:58:43
数学教学通讯·初中版(2014年12期)2014-04-29 00:44:03
Asian Herpetological Research(2014年3期)2014-03-25 01:51:10