
基于可见光通信和接收信号强度检测的列车定位方法研究
2021-03-13 14:17张雁鹏胥亚丽马军民朱东亚
铁道科学与工程学报 2021年2期
张雁鹏,胥亚丽,马军民,朱东亚
基于可见光通信和接收信号强度检测的列车定位方法研究
张雁鹏1, 2,胥亚丽1, 2,马军民3,朱东亚1, 2
(1. 兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070;2. 甘肃省人工智能与图形图像处理工程研究中心,甘肃 兰州 730070;3. 成都地铁运营有限公司,四川 成都 610041)
精确的列车位置信息是CBTC(基于通信的列车控制)系统保障列车安全高效运行的关键因素。针对地铁独特的隧道环境和列车运营特点,提出一种VLC(可见光通信)和RSSI(接收信号强度检测)相结合的列车定位方法。首先,以朗伯光源模型为基础,构建LED可见光通信的CBTC系统的列车定位模型;其次,利用RSSI值计算隧道壁上LED灯与列车之间的直线距离,并使用三边定位原理和最小二乘法拟合列车定位结果;然后,引入VLC与RSSI相结合的列车定位观测模型和误差模型,对运行中的列车实时定位与误差分析;最后,以成都地铁1号线的真实线路数据和设备参数为依据,验证所提方法的可行性和有效性。研究结果表明:该列车定位方法的最大定位误差为39.23 cm,平均定位误差为13.36 cm,满足CBTC系统对高精度列车定位的要求,可以作为传统列车定位方法的一种全新选择。
城市轨道交通;CBTC;可见光通信;接收信号强度检测;列车定位
CBTC(Communications Based Train Control,基于通信的列车控制)系统在我国城市轨道交通中的占有率超过90%,精确的列车位置信息是CBTC系统控制列车安全运行的关键因素[1]。ATP(Automatic Train Protection,列车自动防护)作为CBTC的核心子系统,需要列车位置信息生成MA(Moving Authority,移动授权),实现对列车的超速防护功 能[2]。列车定位精度的提高有利于ATP防护下的ATO(Automatic Train Operation,列车自动驾驶)生成优化的目标速度曲线,从而进一步节能环保,提高乘客舒适度[3]。同时,FAO(Full Automatic Operation,全自动运行)作为提升CBTC系统安全性和效率的发展方向,也需要精确的列车定位技术作为支撑[4]。现有地铁列车定位设备主要有数字音频轨道电路、交叉感应环线、查询应答器、计轴器、测速传感器、加速度计、多普勒雷达、漏泄电缆、裂缝波导管等,列车定位技术主要有WLAN(Wireless Local Area Network,无线局域网)、LTE(Long Time Evolution,长期演进)及GPS(Global Positioning System,全球定位系统)等[5]。然而,现有列车定位设备存在车地信息传输不连续、数据传输速率低、定位结果存在误差累积、投资成本高、维护不便等问题;列车定位技术易受干扰、占用稀缺频谱资源等,且隧道建筑物材料对电磁波的吸收及钢结构的电磁波屏蔽效应,限制了卫星定位技术在隧道定位中的应用[6]。综合以上原因,现有的列车定位技术在一定程度上制约了CBTC系统的发展,因此亟需一种新的定位技术来弥补或替代现有列车定位技术。VLC(Visible Light Communication,可见光通信)是以LED(Light Emitting Diode,发光二极管)为信号源,可见光波为通信载波,在空气中直接传输光信号的通信技术,具有带宽高、传输速率快、抗电磁干扰性强、保密性强、无需申请无线电频谱证、节约能源等特点[7]。可见光定位技术作为一项新兴定位技术,具有高精度及绿色安全等特点,近几年已成为各行业研究的热点[8]。VLC被广泛应用于地下和水下通信、室内定位和导航、车载网络、车辆定位等领域[9−11]。国内外学者已经在相关方面做了大量研究工作,迟楠等[12]指出可见光频段是目前正在使用的无线通信载频频段(2.5~5 GHz)的10 000倍左右,且VLC系统在传输距离为1 m的情况下,能达到9.51 Gbit/s的传输速率。Buyukcorak等[13]提出了基于VLC的三维室内定位系统,其平均定位误差为3.18 cm。Sebastian 等[14]提出了基于RSSI(Received Signal Strength Indication,接收信号强度检测)的室内定位方法,并使用三边定位得到目标位置,获得了良好的定位精度。Iturralde 等[15]提出以LED为发送端,以PD(Photodetector,光电探测器)为接收端的可见光通信定位系统,对井下采矿人员和机械进行定位,获得了12 cm的平均定位误差。王俊高[16]从可靠性、安全性、信息量等方面探讨了将VLC技术引入CBTC系统的可行性与优越性,指出可见光通信技术的引入具有简化系统结构、减少设备数量与成本、维护方便等优势。以上相关文献的研究主要集中于通信速率的提升、室内定位、矿井定位等方面,较少考虑将VLC应用于涉及行车安全的CBTC系统列车定位中。在城市轨道交通中,隧道本身具有良好的封闭特性以及LED照明设备,这些特点使得利用LED灯进行可见光通信成为可能;相对于室内,隧道内可见光通信不会受到自然光等背景光的噪声干扰,而且RSSI具有简单、可移植性强、低成本的特点,大多数现有的通信设备都能够测量RSS(Received Signal Strength,接收信号强度),因此本文提出一种基于VLC-RSSI的地铁列车定位方法。首先,以朗伯光源为基础,建立VLC信道模型,列车头部的PD接收隧道壁上的LED灯光信号,通过RSSI值得到LED灯与列车之间的直线距离;其次,使用三边定位及最小二乘法,获得列车位置,建立了列车定位误差模型;最后,仿真验证该方法的有效性,并对定位结果及误差进行分析。
1 基于可见光通信的列车定位模型
1.1 可见光通信原理
可见光通信技术利用荧光灯或发光二极管等肉眼看不到的高速明暗闪烁的信号来传输信息。VLC系统包括发射模块、空间光传输模块和接收模块[17]。发射模块对要传递的信息进行预处理和编码调制,通过驱动电路驱动LED完成数据发送[18];带有信息的可见光经过空间信道传输后,被接收模块的PD捕获,通过信号处理、解调接收到的数字信号,恢复成初始数据,可见光通信传输原理如图1所示。

图1 可见光通信传输原理
在VLC系统中,LED发送的信息传输方式分为2种类型:直射视距链路和非直射视距链路。直射视距链路要求收发两端直接通信,该方式适用于收发两端之间无阻碍的情况,其功率利用率较高;非直射视距链路通过墙壁等的反射完成收发两端的通信[19],2种类型的信息传输方式如图2所示。由于隧道内的LED灯与地铁列车头部PD之间的传输路径不存在阻隔,隧道环境封闭且设备相对简单,因而隧道中VLC选取直射式视距链路。
1.2 列车定位模型
地铁列车的运营线路包括地下线路、地面线路以及高架线路,且地下封闭式隧道逐渐成为地铁列车的主流运营场景[20],所以本文仅考虑地下隧道环境中的列车定位。LED安装于隧道壁两侧,PD安装在列车头部,发送信号的LED灯与接收信号的PD之间的通信被束缚在一个有限的隧道空间里,因而具有可靠的信息保密性,图3为独立封闭式地铁拱形隧道场景。

图2 直射和非直射视距链路
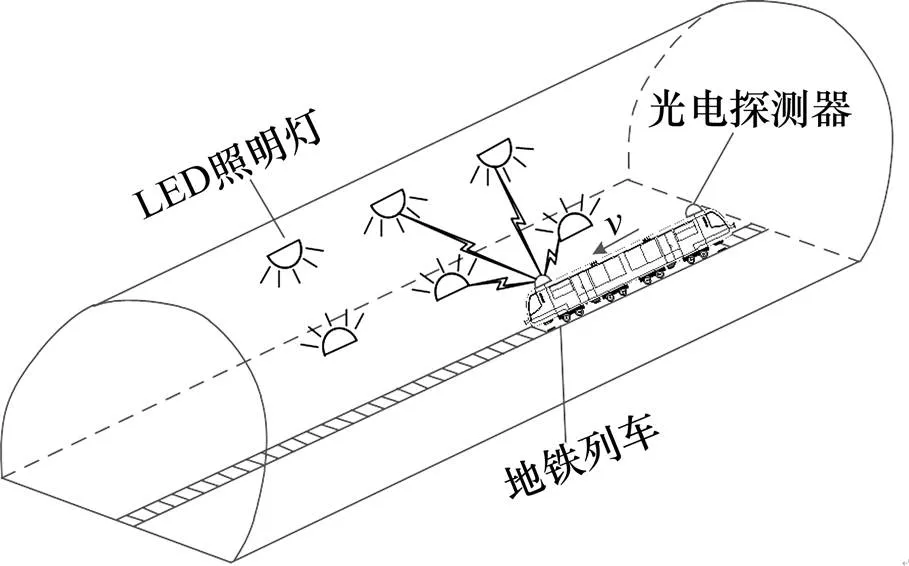
图3 拱形隧道列车定位场景
在列车运行过程中,列车头部PD接收来自隧道壁两侧多个LED灯发送的位置信息,采用CDMA(Code Division Multiple Access,码分多址)调制技术,对每个LED的ID(Identifier,标识符)信息经特定的正交码进行直接扩频处理后,由驱动电路驱动LED发送位置信息。根据扩频码的正交特点,接收机分离出来自不同LED的光信号,从而解决了隧道内可见光通信多信号源之间的符号干扰问题[21],隧道内利用VLC定位的单侧通信模型如图4所示。
1.3 可见光通信信道模型
LED光源传输模型表示了地铁隧道内安装的LED灯与列车头部PD之间的信息传输过程,如图5所示。
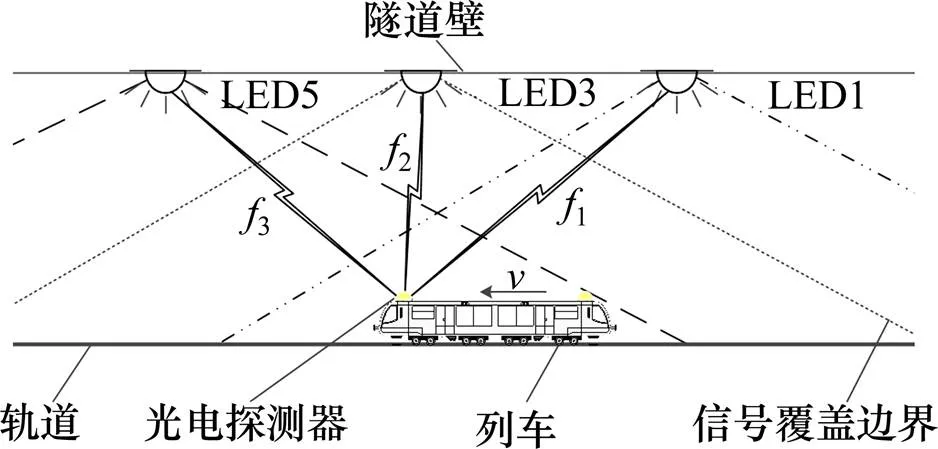
图4 单侧LED灯与PD通信模型

图5 LED光源传输模型
LED属于朗伯光源,其发光强度可表示为:

其中,(0)表示LED灯中心发光强度;表示LED的发射角;为PD的入射角;FOV(Field of View,视场)为视场角;为LED灯与列车之间的垂直距离;为LED灯与列车之间的直线距离;为LED与列车之间的水平距离;为发光方向性模式参数:

在可见光通信直射视距链路中,用(0)表示信道模型:

其中,T()为光学滤波器增益;()为光学聚光器增益;为PD有效接收面积。
接收端PD接收到的功率P与隧道内LED发送端的发射功率P存在如下关系:






图6 LED光强分布
2 可见光通信列车定位算法
在接收端PD接收到LED发送的ID及信号功率后,利用RSSI值得到LED灯与列车之间的直线距离,再根据列车定位算法,计算列车位置。为了利用所提算法对运行中的列车进行实时定位,建立了列车匀速运动模型、VLC与RSSI相结合的定位观测模型和定位误差模型,其中误差模型用于分析列车定位结果及误差分布。
2.1 基于RSSI的列车定位算法
在VLC直射视距链路下,PD接收到的光功率又称RSS,RSS利用了发射信号强度的衰减特性,根据信号强度的辐射衰减估计出发送端和定位目标之间的距离。接收端PD测量接收到的光功率获得RSSI值,通过强度调制与直接检测,检索得到每个LED的坐标信息[23]。PD接收位于隧道内各LED发射的光信号,得到LED自身位置信息ID;结合接收功率与强度衰减因子(0),可得到LED灯与列车之间的直线距离,最后结合三边定位及最小二乘定位算法,得到运行列车的精确位置。
PD获得接收端的信号功率,即接收功率P,则第个LED灯的强度衰减因子(0)可表示为:

由(0)即可得到LED与列车之间的直线距离d可表示为:
依据LED灯与列车的空间位置关系,LED与列车之间的水平距离r可表示为:

最后利用三边定位原理及最小二乘法来估测隧道内运行列车的位置坐标。PD接收来自各LED灯的光信号,假设接收到的第个信号源LED的坐标为(x,y)、列车的待测坐标为(,),则有

采用最小二乘法得到的能使与之间误差的平方和最小,若AA是非奇异的,则可得出列车的具体位置坐标:

式中,

为了可靠地测得列车定位结果,矩阵必须满秩,从而排除3个LED拓扑共线情况。
2.2 基于VLC-RSSI的列车定位模型







图7 基于VLC-RSSI算法的列车定位流程
2.3 列车定位误差模型
为了衡量基于VLC-RSSI的列车定位性能,计算列车定位误差,定义了误差函数:

为了得到每个列车定位点的定位误差偏离列车平均定位误差e的程度,分析列车定位误差的波动程度定义了波动度函数:

其中,e为第个列车定位点的定位误差,由式(19)可得,e为模型中所有列车定位点所得误差的平均值,基于VLC-RSSI算法的列车定位流程如图7所示,其中总定位次数阈值根据隧道长度和列车运行速度确定。
3 实验仿真及结果分析
3.1 实验设计
为了验证所提方法的有效性,本文在实验室环境中搭建了VLC系统,包括发送模块、LED灯、接收模块、电源模块、光学聚光器、HP821 LED光电性能分析仪以及光强测试装置,可用于测量LED的光强、光通量及正向电压等参数,图8为可见光通信系统实物展示。为了使仿真环境更符合线路实际环境,本文采用了成都地铁1号线的真实线路数据和设备参数,选取孵化园站到新益州站隧道照明区间内水平设置间隔为10 m的LED灯,直径为6 m的地铁隧道及地铁B型车(长、宽及高分别为19.52,2.8及3.8 m),在MATLAB中仿真验证本文所提方法的有效性,具体仿真参数如表1所示。

图8 可见光通信系统实物展示
3.2 4个LED所组单元内的定位仿真结果分析
为了验证列车运行于单元中心能有效减小定位误差,本文选取LED1,LED2,LED3和LED4构建10 m×5 m×5 m的基于VLC-RSSI的定位单元,如图9所示,以列车运行线路为轴,即列车运行于单元中心,以0.5 m为间隔,得到19个定位测试点;同理,在靠近隧道壁的边缘位置选取19个定位点,再在前两者之间位置选取19个定位点,进行基于VLC-RSSI方法的列车定位仿真验证。
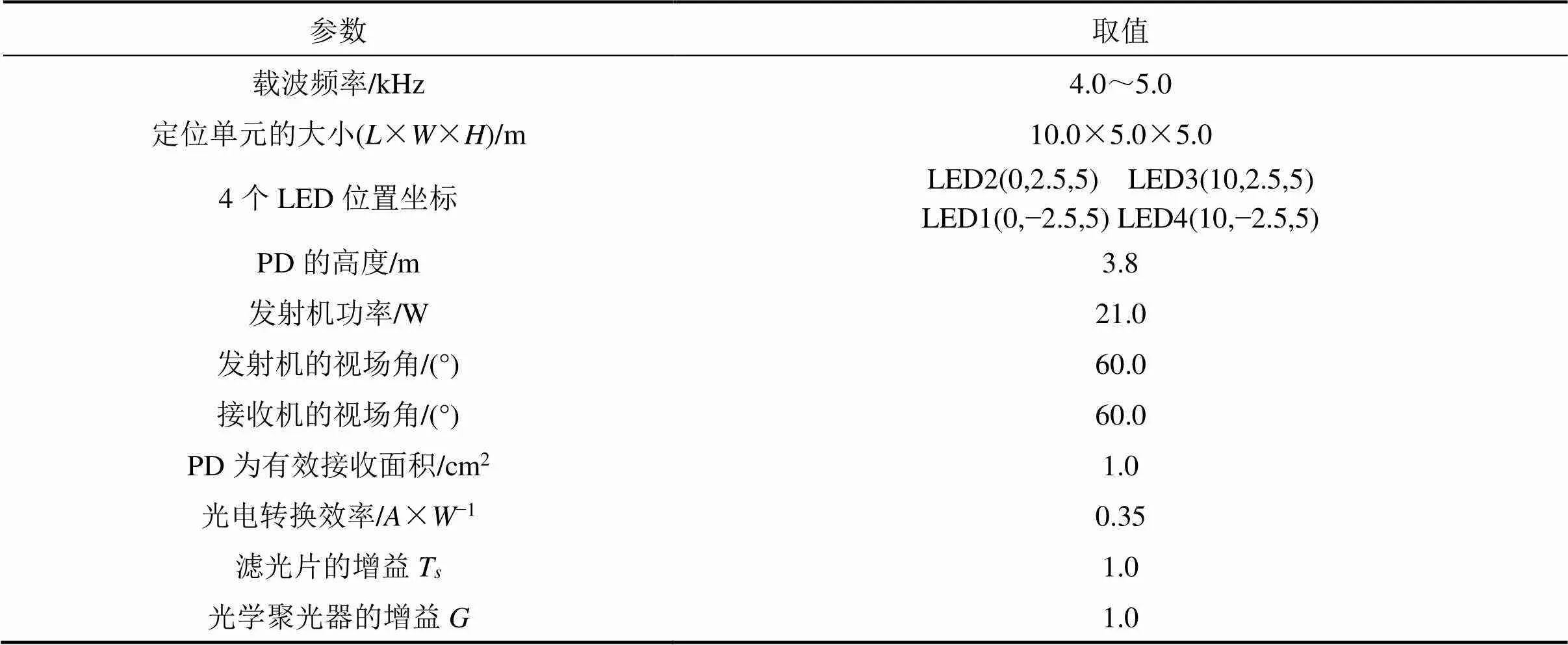
表1 仿真参数

图9 基于VLC-RSSI的列车定位单元
单元内定位仿真实验结果如图10所示,其中红色圆点代表列车实际位置,黑色星号为本文方法得到的定位结果,在定位单元中心位置,即列车在隧道内的真实运行位置,所得平均定位误差为6.36 cm、靠近隧道壁边缘位置平均定位误差为13.9 cm,介于两者之间的位置所得平均定位误差为8.47 cm。从图10中可以看出列车运行线路上所得定位结果与实际位置基本吻合。由于地铁线路设置在隧道内中间位置且固定不变,即列车运行于定位单元中心,因此列车运行于单元中心具有降低定位误差的优势。
在基于VLC-RSSI的定位过程中,由于热噪声及散粒噪声的影响,使得接收端获得的信号功率中包含噪声功率,并且在使用RSSI法获得LED与列车的直线距离d的过程中,存在测量误差,从而使得d的值偏离真实值,导致基于VLC-RSSI算法的列车定位方法存在定位误差。在图11中,可得定位单元内存在中心定位误差小,靠近隧道壁边缘误差变大的情况,这是由于光信号在定位单元边缘处衰减严重、易受到隧道漫反射的影响,使接收到的信号功率大于实际值从而导致边缘定位误差进一步增大。

图10 单元内列车定位仿真结果

图11 单元内列车定位误差分布
3.3 运行列车的实时定位仿真结果分析
设列车的初始坐标为(0,160),方向v取15 m/s,方向v取16 m/s,则初始(0)=[0 15 160 16],采样间隔0取0.1 s,对运行中的列车进行采样与定位,黑色圆点表示列车在0时刻采样得到的真实位置,绿色圆点表示0时刻采用VLC-RSSI方法所得列车的估计位置,列车运行轨迹及定位结果如图12所示。
分析列车定位结果可得,在列车定位过程中所得最大定位误差为39.23 cm,最小定位误差为1.03 cm,平均定位误差为13.46 cm,定位精度符合IEEE 1474.1标准中对于CBTC列车位置测量分辨率(0.25~6 m)的要求,且其中80%以上的定位测试点满足在未安装安全门情况下(ATO)停站时的列车位置精度(0.25 m),获得了良好的定位结果,如图13所示为列车实时定位误差结果。
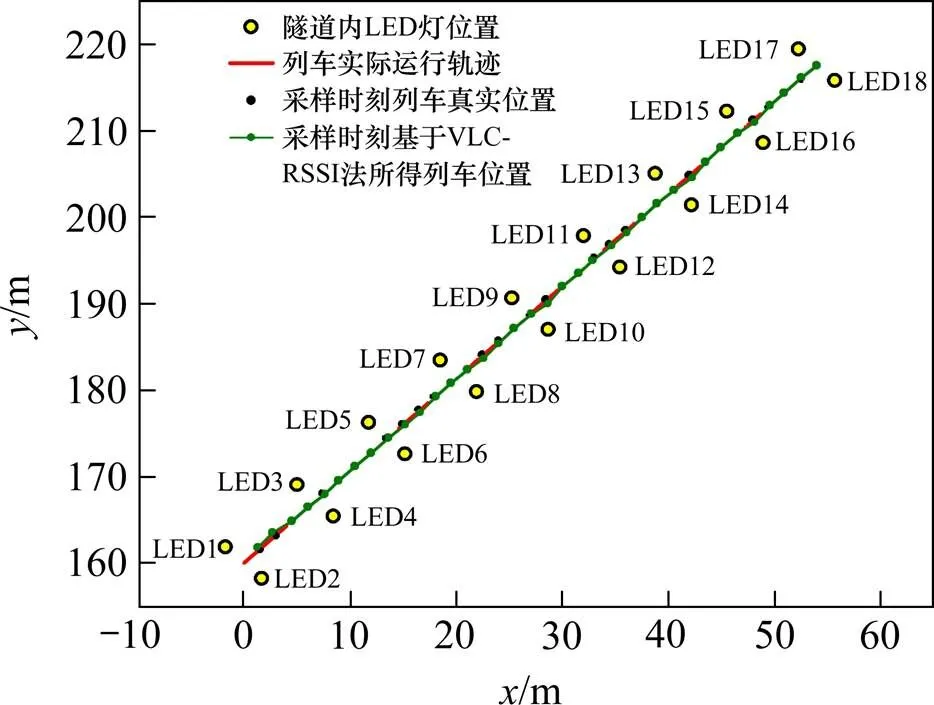
图12 列车实时定位仿真结果

图13 列车实时定位结果误差
计算仿真列车定位误差的波动,得到误差波动图如14所示,可得误差波动度均小于0.3,表明基于VLC-RSSI的列车定位结果误差波动较小,定位误差相对稳定。

图14 列车定位误差波动图
4 结论
1) 精确的列车位置信息是CBTC系统性能提升的保障,将VLC和RSSI引入隧道地铁列车定位中,再使用三边定位和最小二乘法,得到列车位置坐标。利用隧道中现有的LED灯实现可见光通信定位的同时,能减少轨旁设备,降低定位成本。
2) 搭建实验室环境下的可见光通信系统与列车定位单元,验证隧道中地铁列车固定的运行方式在本文所提方法中具有减小定位误差的优势,建立了基于VLC-RSSI的列车实时定位模型,能对运行中的列车进行实时高精度定位。
3) 以成都地铁1号线路与设备参数为依据,验证本文方法的有效性,在对列车进行实时定位过程中,所得最大定位误差为39.23 cm,平均定位误差为13.46 cm,满足IEEE 1474.1 标准对CBTC系统定位精度的要求,取得了良好的定位效果,所提列车定位方法可以作为未来CBTC系统列车定位技术的有效选择,具有广阔的应用前景。
[1] 宁滨, 刘朝英. 中国轨道交通列车运行控制技术及应用[J]. 铁道学报, 2017, 39(2): 1−9. NING Bin, LIU Chaoying. Technology and application of train operation control system for china rail transit system[J]. Journal of the China Railway Society, 2017, 39(2): 1−9.
[2] IEEE-SA Standards Board. IEEE Std 1474.1TM-2004, IEEE standard for communications based train control (CBTC) performance and functional requirements[S]. New York: The Institute of Electrical and Electronics Engineers, 2004.
[3] 张雁鹏, 党建武, 刘晓娟, 等. 基于Stackelberg博弈的城市轨道交通CBTC系统越区切换研究[J]. 铁道学报, 2015, 37(2): 39−45. ZHANG Yanpeng, DANG Jianwu, LIU Xiaojuan, et al. Research on the handoff of CBTC systems for urban rail transit based on Stackelberg games[J]. Journal of the China Railway Society, 2015, 37(2): 39−45.
[4] 宁滨, 郜春海, 李开成, 等. 中国城市轨道交通全自动运行系统技术及应用[J]. 北京交通大学学报, 2019, 43(1): 1−6. NING Bin, GAO Chunhai, LI Kaicheng, et al. Technology and application of fully automatic operation system for urban rail transit in China[J].Journal of Beijing Jiaotong University, 2019, 43(1): 1−6.
[5] 王迪, 陈光武, 杨厅. 基于BDS和RFID的现代有轨电车定位信号完整性研究[J]. 铁道学报, 2017, 39(11): 71−76. WANG Di, CHEN Guangwu, YANG Ting. Research on the integrity of positioning signal of modern tram based on BDS and RFID[J]. Journal of the China Railway Society, 2017, 39(11): 71−76.
[6] 刘江, 蔡伯根, 王剑. 基于卫星导航系统的列车定位技术现状与发展[J]. 中南大学学报(自然科学版), 2014, 45(11): 4033−4042. LIU Jiang, CAI Bogeng, WANG Jian. Status and development of satellite navigation system basedtrain positioning technology[J]. Journal of Central South University (Science and Technology), 2014, 45(11): 4033−4042.
[7] IEEE-SA Standards Board. IEEE Std 802.15.7TM-2018. IEEE standard for local and metropolitan area networks—Part 15.7: Short-Range Optical Wireless Communications[S]. New York: The Institute of Electrical and Electronics Engineers, 2018.
[8] LU H, BA B, CUI W J. A novel fusion visible light location algorithm based on RSSI and imaging of LEDs[J]. Procedia Computer Science, 2017, 107(01): 848−854.
[9] Zabih Ghassemlooy, Luis Nero Alves, Stanislav Zvanovec, et al. Visible light communications: theory and applications[M]. Boca Raton: CRC Press, 2017.
[10] YANG S H, Kim D R, Kim H S, et al. Visible light based high accuracy indoor localization using the extinction ratio distributions of light signals[J]. Microwave & Optical Technology Letters, 2013, 55(6): 1385−1389.
[11] Do T, Yoo M. Visible light communication based vehicle positioning using LED street light and rolling shutter CMOS sensors[J]. Optics Communications, 2018, 407(1): 112−126.
[12] 迟楠, 卢星宇, 王灿, 等. 基于LED的高速可见光通信[J]. 中国激光, 2017, 44(3): 1−12. CHI Nan, LU Xingyu, WANG Can, et al.High-speed visible light communication based on LED[J]. Chinese Journal of Lasers, 2017, 44(3): 1−12.
[13] Buyukcorak S, Karabulut Kurt G. A bayesian perspective on RSS based localization for visible light communication with heterogeneous networks extension [J]. IEEE Access, 2017, 5(1): 17487−17500.
[14] Sebastian S, Petros S. RSSI-based indoor localization with the internet of things[J]. IEEE Access, 2018, 6(1): 30149−30161.
[15] Iturralde D, Seguel F, Soto I, et al. A new VLC system for localization in underground mining tunnels[J]. IEEE Latin America Transactions, 2017, 15(4): 581−587.
[16] 王俊高. 基于可见光通信的城市轨道交通列车控制技术的前景与挑战[J]. 城市轨道交通研究, 2016, 19(10): 1−4. WANG Jungao. Potential application and challenges for urban rail transit control technologybased on visible-light communication[J]. Journal of the Research on Urban Rail Transit, 2016, 19(10): 1−4.
[17] Louro P, Silva V, Rodrigues I, et al. Transmission of signals using white LEDs for VLC applications1[J]. Materials Today Proceedings, 2016, 3(3): 780−787.
[18] Pergoloni S, Mohamadi Z, Vegni A M, et al. Metameric indoor localization schemes using visible lights[J]. Journal of Light Wave Technology, 2017, 35(14): 2933− 2942.
[19] 迟楠. LED可见光通信技术[M]. 北京: 清华大学出版社, 2013. CHI Nan. LED visible light communication technology [M]. Beijing: Tsinghua University Press, 2013.
[20] 蒋育康, 郭爱煌, 艾渤, 等. 城市轨道交通隧道环境下大规模MIMO信道建模[J]. 铁道学报, 2018, 40(11): 88−94. JIANG Yukang, GUO Aihuang, AI Bo, et al. Massive MIMO channel modeling for tunnel of urban rail transit[J]. Journal of the China Railway Society, 2018, 40(11): 88−94.
[21] 关伟鹏, 吴玉香, 文尚胜, 等. 基于CDMA调制的可见光通信室内定位技术的研究[J]. 光学学报, 2016, 36(11): 73−81. GUAN Weipeng, WU Yuxiang, WEN Shangshen, et al.Indoor positioning technology of visible light communication based on CDMA modulation[J]. Journal of Optics, 2016, 36(11): 73−81.
[22] 许毅钦, 陈志涛, 袁涛, 等. 室内可见光通信高精度定位系统设计[J]. 发光学报, 2019, 40(1): 106−114. XU Yiqin, CHEN Zhitao, YUAN Tao, et al. Design of high precision positioning system for indor visible light communication[J]. Journal of Luminescence, 2019, 40(1): 106−114.
[23] GUAN W, WU Y, WEN S, et al. A novel three-dimensional indoor positioning algorithm design based on visible light communication[J]. Optics Communications, 2017, 392(1): 282−293.
A novel method of train positioning using visible light communication and received signal strength indication
ZHANG Yanpeng1, 2, XU Yali1, 2, MA Junming3, ZHU Dongya1, 2
(1. School of Automation & Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China;2. Gansu Provincial Engineering Research Center for Artificial Intelligence and Graphics & Image Processing, Lanzhou 730070, China;3. Chengdu Metro Operation Co., Ltd., Chengdu, 610041, China)
Train position information is the key factor to ensure the safe and efficient operation of trains for CBTC (Communications Based Train Control) systems. Aiming at the unique characteristics of tunnel environment and train operation for urban rail transit, a train positioning method using VLC (Visible Light Communication) and RSSI (Received Signal Strength Indication) has been proposed. Firstly, based on the classical illumination model of Lambert, a train positioning model with LED lamps for CBTC systems has been established. Secondly, the linear distance between the LED lamps on tunnel wall and the train was calculated by using the value of RSSI, and the trilateral positioning principle and the least square method have been adopted to fit the results of train positioning. Furthermore, the observation model and the error model of train positioning, combined with VLC and RSSI, have also been introduced to determine the real-time position and analyze the positioning error for running trains. Finally, according to the real line data and equipment parameters from Chengdu Metro Line 1, the feasibility and effectiveness of the proposed method has been verified. The simulation results show that the maximum error of train positioning of the proposed method is less than 39.23 cm, and the average error is 13.36 cm, which can meet the requirements of high precision of train positioning for CBTC systems and can be used as an alternative choice for traditional methods of train positioning.
urban rail transit; communications-based train control; visible light communication; received signal strength indication; train positioning

TN929.1
A
10.19713/j.cnki.43−1423/u.T20200446

1672 − 7029(2021)02 − 0485 − 09
2020−05−25
国家自然科学基金资助项目(61763025);甘肃省自然科学基金资助项目(18JR3RA106);教育部创新团队发展计划项目(IRT_16836)
张雁鹏(1980−),男,山西朔州人,副教授,博士,从事基于通信的列车控制研究;E−mail:lanzhouzyp@126.com
(编辑 阳丽霞)
猜你喜欢
云南画报(2021年9期)2021-12-02
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
今日中国·法文版(2020年7期)2020-07-04
小学生学习指导(低年级)(2019年6期)2019-07-22
中国外汇(2019年6期)2019-07-13
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
小天使·四年级语数英综合(2016年11期)2016-11-29
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
