垃圾识别分类系统研究与探索*
2021-03-11 03:10王小军
电子器件 2021年6期
王 珂,和 莉,赵 慧,王小军,郝 喆
(江苏开放大学信息化建设处,江苏 南京 210036)
全球的废弃电器和电子设备(Waste Electrical and Electronic Equipment,WEEE)大约每年会产生3 000 万吨到5 000 万吨的电子垃圾,虽然电子垃圾具有很高的回收价值,但大多数电子垃圾也含有必须从城市垃圾流中分离出来的有害物质。垃圾回收机构提供了不同的收集方式,包括在超市和电器电子设备商店收集,市政收集中心、路边收集,家庭收集等等。特别是在城市中心,按需收集电子垃圾可能更符合城市的垃圾回收策略。印度和中国已经对基于互联网的垃圾回收服务进行了调查,新兴技术和电子商务已成为电子废弃物回收领域的新趋势。在国内,Zhang 等[1]调查了居民选择智能设备进行电子垃圾回收的关键驱动因素和障碍。他们发现,智能设备并没有被居民普遍接受,并且态度、主观规范,以及对智能设备便利性的感知与使用的意愿呈正相关。
智能手机和移动应用设备无处不在,在当前的“信息社会”中有着广泛的应用,然而,支持垃圾回收的移动应用程序相对有限。其功能主要用于寻找废物收集站的位置,或设置有关收集时间的提醒。一项使用基于物联网的垃圾收集应用程序[5]的研究还包括了其他功能,比如车辆路线规划等。在许多情况下,居民无法给垃圾回收公司提供精准的数据,在收集点,如果有过多的废弃设备需要回收,或者该设备的尺寸过大,将会给回收公司增加回收难度。
如图1 所示,从个人处理报废设备的角度以及垃圾回公司的角度概述了WEEE 的优先处理次序。需要考虑所收集设备的类型、尺寸和数量,这些数据是整合垃圾回收策略的组成部分,该计划中使用的车辆和人力资源,是回收成本和运输费用的主要因素。按需回收垃圾主要针对中大型垃圾项目,要整合车辆资源和优化路径。

图1 个人与垃圾回收公司优先处理策略
深度学习技术采用直接从图片数据进行特征识别,在众多图片检测和目标分类中取得了巨大的进步,目标检测与识别已广泛应用于机器人、电子产品、道路安全、自动驾驶、智能交通系统和文本识别等人工智能系统中,其主要技术手段是利用视觉识别算法来识别目标的类型和尺寸,基于图片识别的目标检测是识别图片中是否出现了特定的目标,确定检测目标之后,使用特殊的可调节框架确定其位置和大小。
在本文研究中,探索了一种新的垃圾回收系统,主要是促进个人与垃圾回收公司之间数据的精准交流。提出了一种新颖的方法来识别和分类废物设备[2]。该算法主要采用具有深度学习特性的神经网络,基于区域的深度卷积神经网络检测图片中废物设备的类别和大小。
1 相关研究工作
1.1 电子垃圾图片识别系统
一种新颖的WEEE 收集规划系统方案包括废物设备的识别和分类,如图2 所示。首先把准备处置的废物设备拍摄成单独的照片,然后将照片上传到后台识别废物设备的图片识别服务器上。根据智能手机的性能,这个系统也可以作为一个移动应用程序的APP。然后在识别和分类电子废物后,垃圾回收公司会根据废物的大小和类别制定有效的回收计划。其中规划过程可以进一步应用人工智能算法,为垃圾回收车辆提供最优路径[3]。

图2 WEEE 收集规划系统总体方案
1.2 基于深度学习的电子垃圾识别
深度学习是用于建立和模拟人脑进行分析学习的神经网络,并模仿人脑的机制来解释数据的一种机器学习技术,深度学习最大的意义就在于能够提取对象的特征,机器学习直接从数据中“学习”信息,而不依赖预先确定的方程作为模型。本文提出的基于深度卷积神经网络CNN 电子垃圾识别模型[4],如图3 所示。

图3 基于深度卷积神经网络分类器模型
模型输入包含选定类别的电子垃圾的图片。在本文的研究中,选择了家庭中常用的三种电器和电子设备:冰箱、洗衣机、监视器或电视机。每种设备都有自己独特的特征,其中模型的输出类别是三类。深度卷积神经网络CNN 可以分为两个主要的功能模块:特征学习模块、分类模块。特征学习模块主要由交替卷积层和池化层组成,卷积层对输入的h×b×c(图像高度h×图像宽度b×通道数c)图片x进行了2D 卷积,具有m个不同的滤波器。输出是c个通道的特征图y。

式中:bk是偏差;Wi,j,p,q是滤波器尺寸为kh×kb的第q层权重;i=1,2,…,h;j=1,2,…,b;p=1,2,…,c;q=1,2,…,m。
二维卷积层将滑动卷积滤波器应用于输入层,该层通过沿输入方向的垂直和水平方位移动滤波器对输入进行卷积,计算权重和输入的点积,然后加上一个偏置项[5]。池化层主要负责空间子采样,它进行一个特殊的二维卷积,步长大于1,通常等于滤波器的大小。该网络中的最大池化层如下式所示:

式中:h是输入图像的高度;b是输入图像的宽度;y是尺寸为hp×bp的池化结果;i=1,2,…,hp;j=1,2,…,bp;q=1,2,…,m。
特征学习模块的每一层都将前一层的输出作为输入,从而形成一个分层特征映射,将原始像素数据转换为多层特征向量。分类模块由全连接层组成,该方法利用最高层次的特征向量作为单隐藏层前馈神经网络分类器。对于分类任务,输入大小通常是训练图片的大小[6]。使用的图片为RGB 格式,大小为128 pixel×128 pixel。
1.3 基于深度卷积神经网络分类结果
采集了一组废弃电器设备的照片进行分类。这组数据包括不同型号的冰箱、洗衣机和电视机,如图4 所示为相关数据图片。

图4 训练数据部分样图
该网络使用1 800 张图片进行训练,分为3 类,每类600 张,然后选取300 张测试图片,每类100 张进行测试。其中,数据集的制作采用网络爬虫和人工拍摄的方式,为了保证图片类别的准确性,所有图片都经过人工预处理。测试图片不是训练集的一部分,为提高训练和测试的准确率[7],对图片进行方形裁剪。每个图片包含一个废物物品(冰箱、洗衣机、电视机、显示器),图片缩放到128 pixel ×128 pixel。采用不同的卷积神经网络结构,测试了卷积神经网络包含的3 个卷积层。在3 个方面对深度卷积层结构进行了修改:滤波器的数目,滤波器的大小,以及图片输入的大小。使用系统的方法来确定滤波器的大小,卷积层c1 滤波器的大小为7×7,9×9,和11×11,卷积层c2 滤波器的大小为7×7,5×5,和3×3,卷积层c3 滤波器的大小为3×3。逐步改变滤波器的大小和数量,训练步长范围是1 到4,进行训练得到新的参数,重复训练5 次,对训练结果进行评估,选择性能最好的一组滤波器。
2 实验分析
2.1 选定类别电子垃圾分类结果
表1 中给出了2 种深度卷积神经网络的详细配置参数,网络的Padding 卷积层分别为0、1、1,FS 是滤波器的大小,FM 是特征图,MS 是特征图的尺寸,最大池化层是3×3 的滤波器,并且在测试的过程中对洗衣机、冰箱和显示器使用C1、C2 和C3 卷积层特征可视化,如图5 所示。利用该方法对3 类电子垃圾设备进行了检测和分类,平均准确率为90%到96.7%,其准确率的波动取决于参数的配置和训练数据量的大小,分类结果的混淆矩阵如图6 所示。
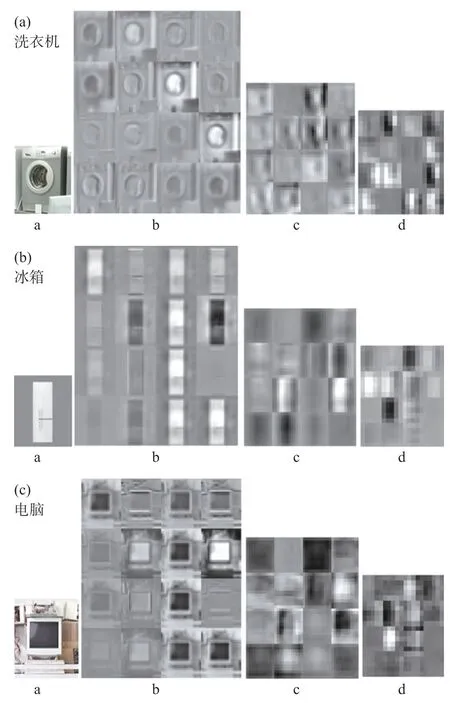
图5 CNN2 卷积神经网络输出特征可视化
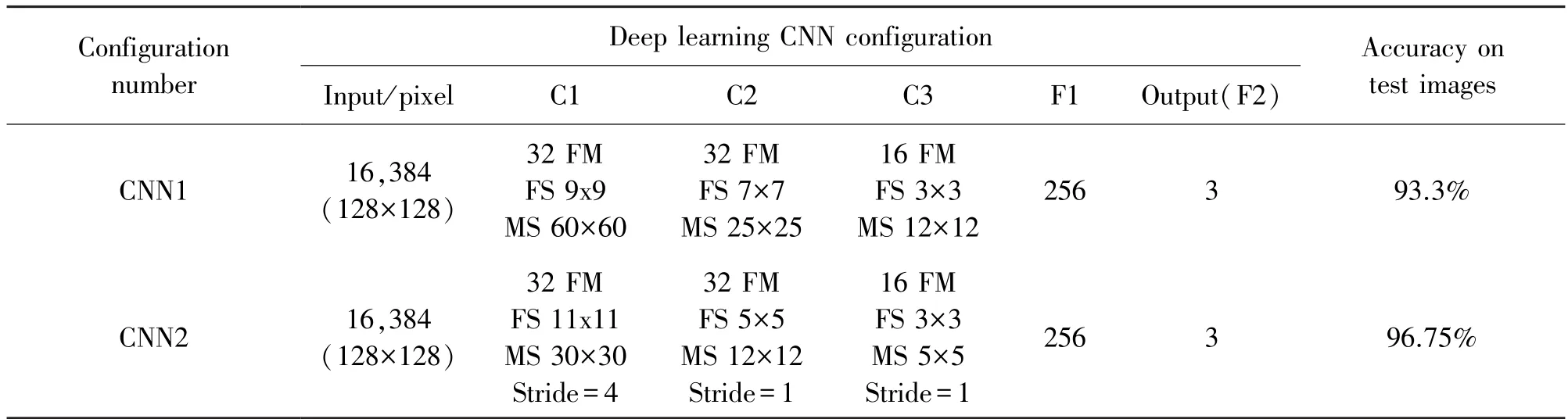
表1 两种深度卷积神经网络结构的分类结果
在混淆矩阵图6 中,行对应于预测的输出类,列对应于真实的目标类。对角线单元对应于已正确分类的预测值,非对角线单元对应于未正确分类的预测值。图6 最右边的一列显示了预测每个类中所有已测试图片中正确和不正确的分类百分比[8-10]。图6 底部的一行显示了属于每个类的所有图片的正确分类和不正确分类的百分比,图6 右下角的单元格显示了总体准确率。该方法只允许识别图片中的一个对象,并对图片尺寸大小有要求。
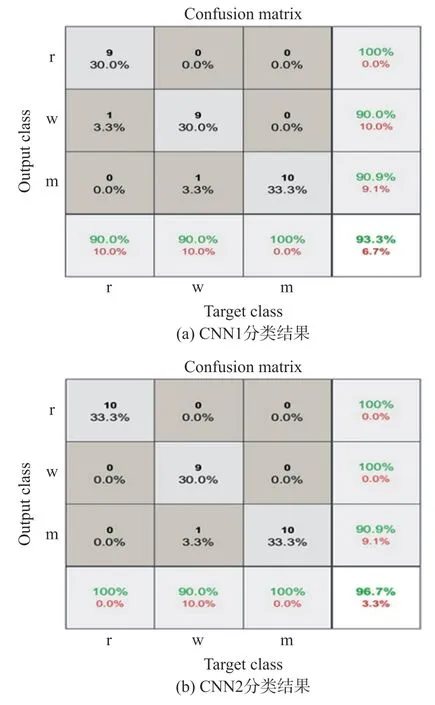
图6 卷积网络CNN1 和CNN2 对三类垃圾进行分类的结果
2.2 多目标分类识别
Faster R-CNN 算法利用了卷积神经网络来提取输入的垃圾图像特征图,然后再通过共享卷积层将该特征图分别送入Faster R-CNN 网络和区域提议网络中,算法框架如图7 所示。采用Faster R-CNN网络在一幅图片中同时识别多个物体,Faster RCNN 网络可以选择要处理的区域并确定如何对这些区域进行分类,并且在识别多个目标的同时还可以识别物体的尺寸[11-12]。使用CNN 作为基础网络的Faster R-CNN 目标检测网络包含3 个卷积层,滤波器大小为5×5,3×3 和3×3,并对其他的网络参数进行调整(滤波器数量、层数、完全连接层中的神经元个数、最大循环数),网络训练有多个阶段,每个阶段学习完成的条件为10 个epoch,以达到最佳效果。
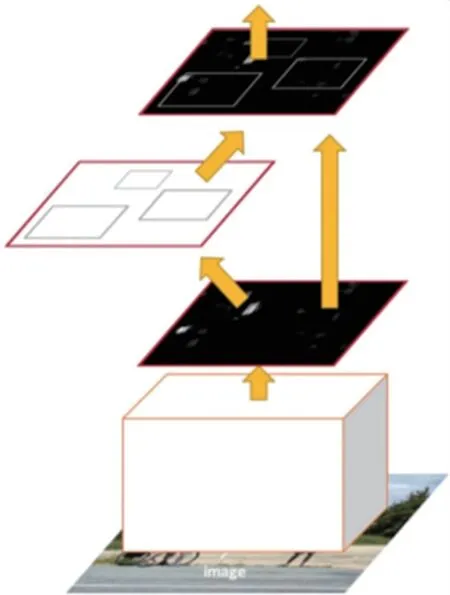
图7 Faster R-CNN 算法框架
废物设备的图片可以包含一种、两种或三种类型的废物,以及几件相同的设备,或相同类别的设备。设备类型的识别是电子垃圾收集规划的第一步,确定对象的大小是关键,WEEE 收集计划要求指定一辆能够装载客户要求处理的所有废物设备的车辆,电子垃圾报告的自动化系统既方便客户拍照并发送照片,也方便收集公司服务器的后台处理,上传的所有照片都可以被识别并按类别和大小进行分类,图8 是多目标识别对象的示例。该方法的准确率平均为90%,洗衣机图片识别为100%,冰箱图片识别为80%。CNN 网络比R-CNN 网络更能准确地识别物体。Faster R-CNN 的优点是能准确识别目标的大小[13-14],图9 为网络采用四折交叉验证算法进行验证,经过了400 个epoch 评估测试。从图中可以看出,当训练模型在200 个epoch 时曲线趋于平稳,性能最优。图10 是训练过程的Loss 曲线,可以看出网络能够迅速收敛,没有出现大幅度震荡和过拟合,说明网络结构设计较为合理。

图8 Faster R-CNN 多目标检测结果

图9 卷积神经网络四折交叉验证准确率测试
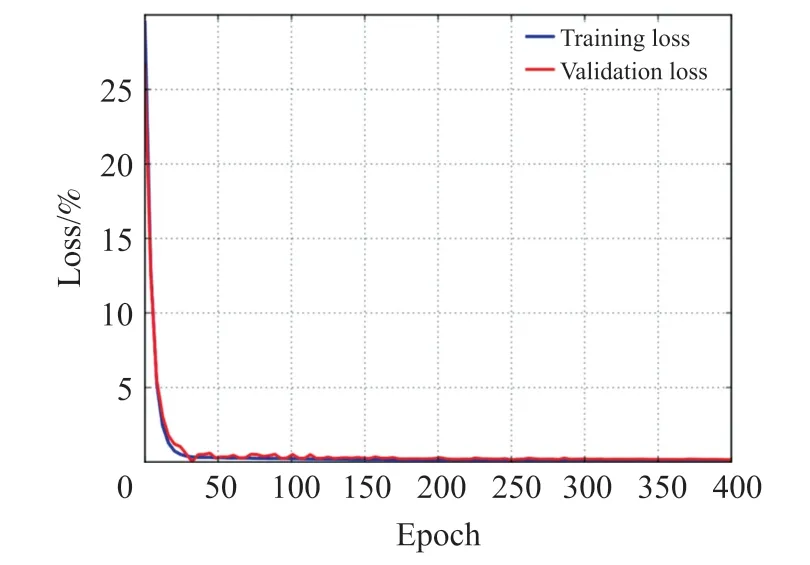
图10 训练过程的Loss 曲线
深度学习的研究需要很高的硬件配置环境,尤其是对实验机器的显卡性能和内存要求极高,所以本实验使用1080Ti 显卡和64 Gbyte 的DDR4 内存,该配置具有极强的处理性能。
3 结论
本文提出了一种新的电子垃圾图片识别和分类方法,利用CNN 对电子垃圾类型进行分类,并利用Faster R-CNN 对图片中垃圾设备的类别和大小进行检测,采用的分类识别算法具有较高的识别率。由于数据量不充足,可通过对数据量进行扩充,进一步提高模型的准确率和鲁棒性。基于深度学习CNN和Faster R-CNN 网络识别废物设备的准确性为90%到96.7%。相比之下Faster R-CNN 网络的准确性较低(90%),但可以进行识别并确定图片中目标的大小。这种用于识别废物的新方法为数字化的解决方案提供思路,利用智能手机的拍照上传功能,从而可以根据客户图片识别报告选择收集的设备。后续的研究会考虑识别和分类多种废物设备,并改进网络模型提高系统的整体性能。
猜你喜欢
中老年保健(2021年4期)2021-12-01
北京航空航天大学学报(2021年9期)2021-11-02
基层中医药(2021年7期)2021-11-02
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
北京航空航天大学学报(2018年1期)2018-04-20
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
中国资源综合利用(2016年1期)2016-02-03
爆笑show(2014年3期)2014-06-25