无人机搭载超声波仪器测量风场的校正算法研究*
2021-03-11 03:09顾海锋丘仲锋
电子器件 2021年6期
顾海锋,丘仲锋
(1.南京信息工程大学电子与信息工程学院,江苏 南京 210044;2.南京信息工程大学海洋科学学院,江苏 南京 210044)
风是一种常见的自然现象,在农业、航海、航空、军事和气象等领域都有着重要价值。风速、风向是风场的两个重要因素,其测量精度对风场研究具有重要意义[1]。随着科技的发展,无人机在各种领域得到了广泛的应用[2-5],特别是在江河湖泊相关领域中有着突出的作用。随着无人机应用的深入,采用多旋翼无人机进行气象监测也正成为一个研究热点。
传统测风方法有机械式、热敏式和激光多普勒式等[6],机械式测风仪虽然结构简单、价格低廉,但其旋转件存在磨损需要定期维护;热敏式虽然便携、智能,但仅对于一些狭窄空间里的测量比较方便,而且其精度难以把控;激光多普勒式测量精度高、动态响应快,但需要由人工掺入适当的粒子作散射中心,且价格较贵[7]。目前主要采用无人机和超声波两种方法进行测风,相对于传统方法,无人机测风可以不受空间的限制,机动灵活、高效快速,超声波测风原理简单,无机械磨损,且测量精度高[8]。无人机测风技术主要有水平空速归零、航位推算、平面矢量三角形方法等三种。水平空速归零法仅适合常规场合定点测速;航位推算法测量精度差,仅仅适合低成本、对测量精度要求不高的无人机测风速;平面矢量三角形法虽然使用简便,可以对大面积区域进行连续测量,但受传感器系统误差影响,测量精度还有待提高。将超声波测风仪搭载在无人机上可以兼顾两者的优势,但无人机在飞行时要调整姿态就会产生倾角,测风仪搭载在无人机上也会随之倾斜,这不可避免地会造成测量结果的误差。
针对无人机飞行时倾斜对测量结果造成误差这一问题,本文设计了一种基于无人机倾角对超声波风速风向仪的测量结果进行校正的测风算法,包括无人机悬停与前进两种状态下的校正。数据结果表明,此方法可以减小测量误差,实现低空风场的实时监测。
1 算法理论推导
1.1 姿态解算
由于无人机上搭载的MPU9050 传感器读出的数据为四元数,需要找四元数与3 个姿态角的关系,故要对无人机进行姿态解算。
《惯性导航》第九章中提到[9],假设有一个参考坐标系R,它对应于右手坐标系。有一刚体相对于R系作定点转动,此定点为O。我们选取坐标系b与刚体固联,假设初始时刻b系与R系重合,刚体绕单位瞬轴u逆时针旋转了θ1角度,位置向量为r,则旋转后的位置向量r为:

通过构造四元数可以得到b系至R系的坐标变换矩阵为:

式中:q0、q1、q2、q3为四元数。
在无人机上一般使用机体轴坐标系,它是固联于飞行器并跟随飞行器运动的一种坐标系[10]。由于此坐标系最常用,故常常简化成Oxyz表示。该坐标系的原点在飞机的质心上,x轴位于飞机对称平面内,与机体轴线平行,指向前方;y轴垂直于对称平面,指向右侧;z轴也在对称平面内,垂直于x轴并指向下方。此坐标系为右手坐标系。
如果参考坐标系为导航坐标系n,与刚体固联的坐标系为机体轴坐标系,由于规定北偏东方向为正,所以绕z轴顺时针方向为正,其余轴均逆时针方向为正。从b系至n系,设无人机绕x轴转动α角度,再绕y轴转动β角度,最后绕z轴转动γ角度,分别为横滚角、俯仰角、航向角,可以得到其坐标变换矩阵为:
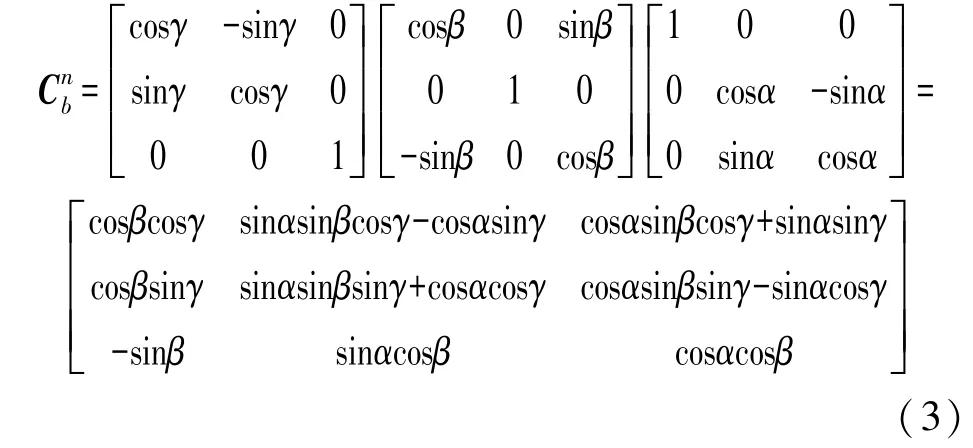
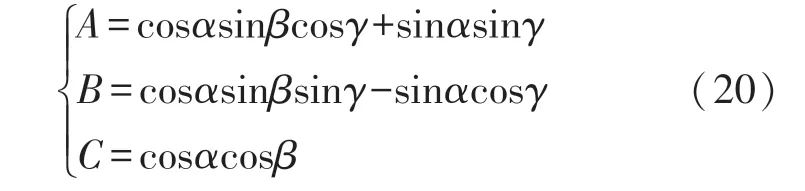
对比式(2)和式(3)两个坐标变换矩阵可得3个姿态角与四元数的关系式:
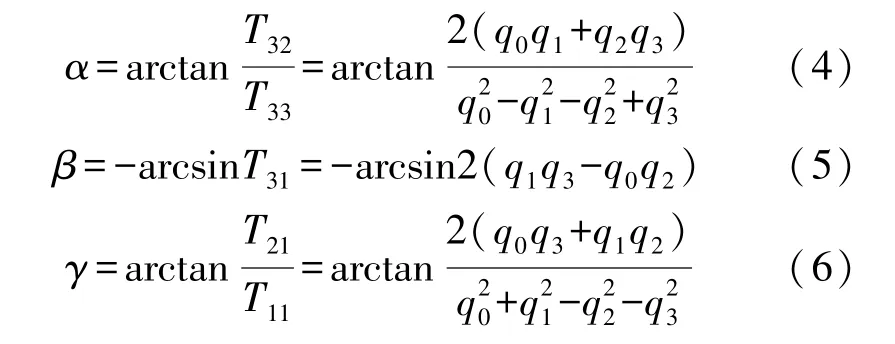
通过无人机上MPU9050 九轴传感器读取四元数q0、q1、q2、q3,代入关系式即可求得3 个姿态角。
1.2 无人机倾角
无人机为了保持姿态,其机身平面与水平面有了一个倾角,该倾角可以看作是由无人机绕三个轴旋转产生的,水平面的法向量为n1=(0,0,1),随着无人机的旋转,新的平面法向量为:

无人机的倾角为机身平面与水平面的夹角,可以求得:

1.3 超声波测风原理
目前对超声波测量风速、风向最常用的方法是时差法,当超声波在空气中传播时,顺风和逆风之间存在速度差。如果固定传播的距离,速度差就会以时间差的形式反映出来[11-14]。将两对超声波换能器如图1 所示放置,每对换能器之间的距离均为d,风向为任意风向,在x轴方向传播时间为t1和t2,在y轴方向传播的时间为t3和t4,待测风速为v,x轴方向的风速为vx,y轴方向的风速为vy,超声波在空气中传播的速度为vu。

图1 超声波换能器阵形位置图
可以得到:

所以风速大小为:

设x轴正方向为0°,逆时针方向为正,则风向为:

随着时间的变化,可得某时刻的风向为:
1.4 超声波测风校正
1.4.1 悬停状态下
当无人机处于悬停状态下时,将风分解为与无人机平面平行的分量和垂直的分量,垂直分量对测风仪无影响,所以超声波测风仪测得的风为平行分量,测得的风向角与原风向角一致,则修正的结果为:

式中:ω为超声波测风仪N方向与机头的夹角,在测风前将其调零。
1.4.2 前进状态下
当无人机处于前进状态时,GPS 测得无人机前进的速度大小为v1,无人机以一定的速度前进,等效于无人机悬停时,同样大小的风沿着无人机前进方向的反方向吹来。超声波风速风向仪测量的速度大小为v,此时的vc为无人机前进状态下等效的风v1与实际要测的风v2的合成风,则:

在机体坐标系下,无论无人机平面如何旋转都会过原点,所以无人机平面的方程为:

由无人机平面法向量n2可求得:
令z=0,可得无人机平面与水平面交线方程为:

又有,风向线与交线垂直,故风向线方程为:

图2 为当B>0 时的合风向分解示意图,此时φ∈(0,π),合成风vc分解为v1和v2,v1为无人机前进状态下的等效风,v2为实际要测的风;φ为合风的风向角,θ2为实际风的风向角。合风的坐标为vc=,等效风的坐标为v1=(-v1,0)。
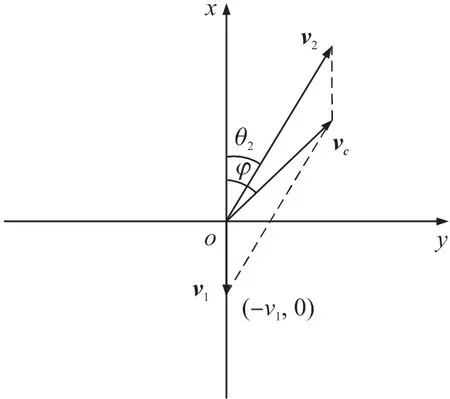
图2 合风向分解示意图(B>0)
由式(18)可得:

实际风速大小为:

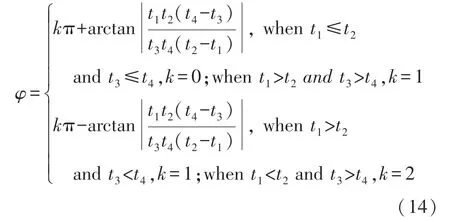
在这种情况下求出的风向角为:
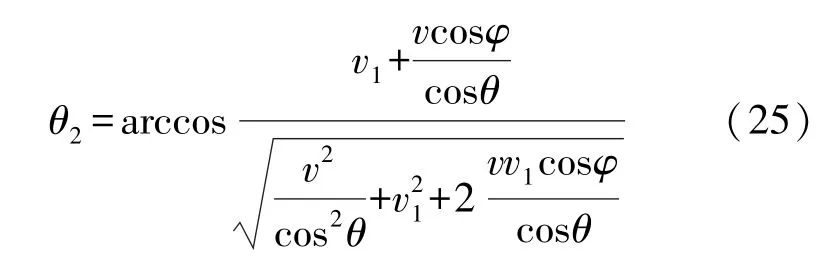
当B<0 时,合风向角φ∈(-π,0),同理可得

式中:v1为无人机前进的速度;v为超声波测风仪测量风速大小;φ为超声波测风仪测量风向;θ为无人机倾角。将θ2转化为[0,2π)内的角度,即

2 实验与结果分析
为了验证上述测风算法的可行性,选取2020 年8 月的不同时间点,在南京市浦口区南京信息工程大学中院操场空旷处进行多次低空飞行探测试验。试验系统包括无人机模块、超声波测风仪模块和地面站模块。考虑到载重与续航问题,试验选用如风4 四旋翼无人机,其最大额外负载10 kg,最大续航可达60 min。选用HY-WDC6 微型自动气象站来测量风速风向。该气象站可同时测量温湿度、气压、风速、风向和雨量等气象要素,测量风速精度为±5%,风向精度为±3%。
试验开始前,将超声波风速风向仪搭载在无人机上,并将风速仪N方向与无人机机头对齐,正确连接好设备配件及连接线后,打开设备,检查GPS等均正常后,飞手操控无人机飞行。
对几次试验中最稳定的试验数据进行校正,其结果如图3 所示。风速基本上在0 和7.75 m/s 之间,随着相对位置高度的增加,风速大小呈先增大后减小的大致趋势。在近地面由于人类活动、地表摩擦等原因风速减小,随着高度的增加,风速逐渐增大。由于风场具有变化、不可控等特性,测量风速出现上下波动,另外由于空气稀薄等原因,风速在高度达到500 m 后又有所减小。

图3 风速校正结果
风向校正后的结果如图4 所示,此风向以北偏东方向为正。从图中可以看出风向的波动比较大,但基本都在±20°上下波动。

图4 风向校正结果
由于试验用的地面气象站读出的数据为相对高度的平均风速与风向,这里我们将测量校正后的风场数据也作平均处理,并与观测数据作对比,结果如表1和表2 所示。修正后的风速最大误差为0.32 m/s,最小误差仅0.05 m/s,其最大误差率为6.6%,最小误差率为3.3%。结合数据的标准差可以看出风速修正结果比较稳定,误差较小。而风向最大偏差5.14°,最小偏差0.38°,从标准差来看波动较大,但其平均值误差率却不是很大。

表1 风速误差比较

表2 风向误差比较
造成风向数据波动较大的主要原因是超声波风速风向仪受多旋翼无人机自身风场的影响[15]。在实验中,我们尽可能地把超声波测风仪架高一点,最大程度地减小无人机风场对实验结果的影响。从数据来看,无人机自身风场对风速测量影响不是很大,但在风向的测量上还需进一步改进以减小误差。总的来说,此测风校正算法风速测量误差率较小,可以实现对低空风场的实时监测。
3 结论
在算法推导与实验测试分析的基础上,提出了一套基于无人机倾角对超声波风速风向仪测量结果进行校正的测风算法,包括无人机悬停与前进两种状态下的校正。该算法结合了无人机与超声波仪器测风的优势,弥补了无人机测风精度低与超声波仪器测量范围小的不足,具有成本低、方便灵活、可靠性高、测量精度高等优点,不受条件限制,可以实现大区域连续测量,具有较高的应用价值和广泛的应用前景。但由于受无人机自身旋翼的影响,测量结果有一定的误差。实验中采取将测风仪架高的方法,可以将误差率控制在很小的范围内,但仍需改进。无人机测风技术的精度还有很大的提升空间,同时还可以在无人机上集成一些精密的传感器来测量其他的气象要素,这将是我们下一步的研究方向。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
国学(2020年1期)2020-06-29
中国诗歌(2018年6期)2018-11-14
物流技术与应用(2017年12期)2018-01-31
数学物理学报(2017年6期)2018-01-22
能源(2017年8期)2017-10-18
摄影之友(影像视觉)(2017年1期)2017-07-18
通信电源技术(2016年1期)2016-04-16
知识经济·中国直销(2016年3期)2016-02-27