
全站仪自动监测系统的构建方法及其在地铁监测中的应用*
2021-03-11 07:39廖根根吴国庆
工程技术研究 2021年3期
段 磊,廖根根,彭 静,凌 涛,吴国庆
1.中铁五局集团第一工程有限责任公司,湖南 长沙 410117
2.湖南信息学院商学院,湖南 长沙 410151
随着科学技术和社会经济的不断发展,工程建设复杂程度逐渐提升。在工程施工、运营期间,天气、地质、施工以及运营等因素都会对工程建筑的稳定性产生影响,使其发生形变甚至破坏。为保障人们的生命、财产安全,必须及早发现问题并采取相应的解决措施。自动监测技术指的是一种周期性监测建筑工程安全性的重要监测技术,可以有效避免一些安全隐患发生。近年来,在相关研究人员的共同努力下,推出了不同功能的自动监测系统,但是随着建筑领域对自动监测系统的要求越来越高,这些监测系统在数据信息传输、数据处理等方面存在问题较多。为丰富全站仪自动监测系统的功能,避免有线传输方式受距离使用限制,提高数据处理效率,文章提出了基于全站仪自动监测系统的构建方法并对其在地铁监测中的实践进行研究。
1 自动监测系统
1.1 系统硬件
该系统硬件主要包括供电设备、通信设备、计算机、全站仪、基准点、监测点等。其中,核心传感器为全站仪。
(1)全站仪。为了满足智能化监测需求,该系统选取型号为徕卡TS15A全站仪作为主要测量仪器。该仪器具有自动校准、精细跟踪锁定、联机控制等功能,不仅在普通测量工程中得以广泛应用,还可以解决一些特殊工程测量问题。
(2)通信设备。目前,大部分数据信息传输设备采用的传输方式为有线传输模式,这种传输不适用于远距离传输。为了解决这一问题,必须将无线传输技术融入系统开发。文章开发的全站仪自动监测系统将应用到地铁形式环境中,因为监测面积较大,所以首选移动网络技术。移动网络传输技术优势在于成本低、速度快、稳定性好等。
(3)基准点的选择。基准点是变形监测的基础,基准点应布设在变形体或变形区之外,且地质情况良好不易破坏的地方。但从地铁建成后的情况来看,基准点设置在地铁外是不可取的。考虑到地铁车站所处的地质条件一般较好,遇到不良地质段,也都进行了地基加固处理,发生变形的可能极小,将基准点设置在车站上,并定期与高等级控制点进行联测。
(4)监测点的布设。因测量环境开阔,需要布置较多监测点。在监测地铁过程中,位于同一侧的监测点比较多,很有可能出现ATR照错棱镜现象,为避免重测或漏测情况发生,利用徕卡TS15A全站仪望远镜小视场功能,解决测量空间狭窄、棱镜多,无法确定应测量哪一个棱镜的问题。隧道内全站仪视角图如图1所示。图1中B点为地铁隧道中全站仪所处位置,隧道壁与仪器测站点之间的垂直距离为H,望远镜的正常视角设定为α,观测距离设定为D,通过计算可以获取全站仪视场范围长度I,对应的计算公式为式(1)。

图1 隧道内全站仪视角图

常规视角是(0.5×0.5)gon(1gon=0.9°),假设H=5m、D=200m,通过使用式(1),可求得I=91.6m。依据这个数据,可以在91.6m范围内布置一个棱镜,但是无法满足监测点密度需求。添加“小视场”功能以后,可以将望远镜的正常视角调节为(0.15×0.15)gon,经过计算同样可以得到视场范围,即I=20.8m。
针对不同的视角进行计算,可以得到多个视场范围,如表1所示。
由表1可知,情况相同时,使用小视场有助于减小隧道壁上的视场范围,能够在变形区域内适当对监测点进行加密处理,从而满足相关监测需求。

表1 视场范围长度表
1.2 系统软件
该系统构建选用的软件为Leica Geo Office,用于采集和处理全站仪数据,是整个监测系统的核心部分。
全站仪自动监测系统运行的第一步为数据自动采集,以下为数据采集的主要流程。
第一步:建立项目,依据实际情况,设置参数。
第二步:利用后方交会法设站,使用至少4个点进行后视定向,从而获取水平角、竖直角、斜距,进而计算出仪器所处点的三维位置。
第三步:按照顺序,将监测点编号输入系统中,观测保存监测点具体三维坐标。
第四步:自动观测,同时将采集到的数据传输至监测软件,并对数据进行转换处理。
1.3 系统构建流程
文章创建的自动监测系统主要由6部分构成,分别是基准点、监测点、通信设备、全站仪监测站、电源设备、计算机控制系统。自动监测系统关系流程如图2所示。

图2 自动监测系统关系流程
具体流程如下:首先,由电源供给系统为自动全站仪观测站、通信系统、计算机监控与数据处理系统提供电源;其次,将自动全站仪观测站采集到的数据通过通信系统发送至计算机,接收到数据信息以后,对其进行处理;再次,将经过处理的数据与限值进行对比分析,如果超出了限值,则导出结果并发出预警,反之,只导出结果;最后,生成报告。
2 测量原理
文章以后方交会设站为例进行分析,该方法是通过观测未知设站点到至少2个已知控制点,确定设站点的坐标。依据三角形交会点的位置,可以将已知点划分为三种情况:第一种情况如图3所示,交会点在三角形内;第二种情况如图4所示,该点位于三角形外侧;第三种情况如图5所示,该点在三角形一对顶角内部。假设E、F、G三点坐标分别是(XE,YE)、(XF,YF)、(XG,YG),待测点W的坐标是(XW,YW)。

图3 交会点在三角形内部

图4 交会点位于三角形一边的外侧
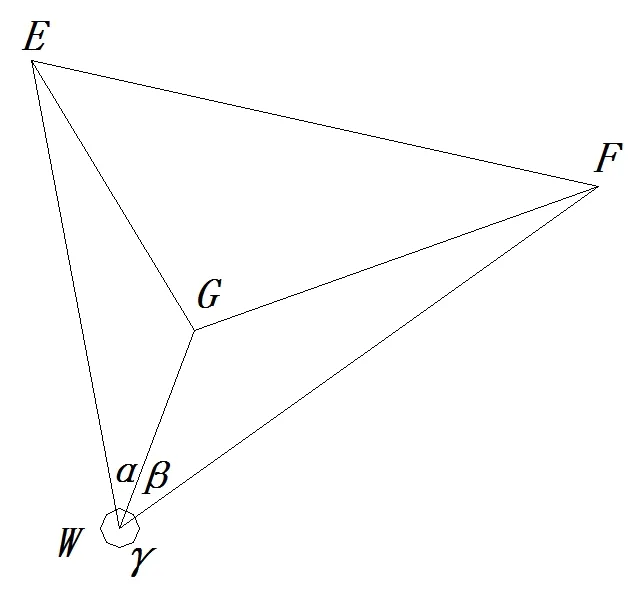
图5 交会点在三角形一对顶角内部
利用式(2)进行计算,得到的后方交会点坐标为(xW,yW)。

公式(2)中的WE、WF、WG计算分为两种情况,第一种情况是针对图3与图4的,经过计算可以获取权值,对应的计算公式如下:

第二种情况是针对图5的,经过计算可以获取权值,对应的计算公式如下:

3 全站仪自动监测系统在地铁监测中的应用
3.1 项目简介
沈阳地铁九号皇姑屯站1号风亭、D出入口施工,可能会影响已运营的地铁9号线淮河街沈医二院—皇姑屯站区间,因此需要对已运营地铁线路沈阳地铁9号线淮河街沈医二院—皇姑屯站区间进行变形监测。
3.2 监测点的布设
在地铁九号线淮河街沈医二院—皇姑屯站区间采用自动化监测,监测范围内的共布设10个监测断面,每个断面安装3个监测棱镜。布设变形点的位置时利用仪器的小视场功能,使之均匀分布在仪器望远镜的视场内,相互不受干扰。监测点位布设平面图如图6所示。

图6 监测点位布设平面图
2020年3月,该项目开始监测,截至2020年5月已经获取数据80多期,因受到监测环境的限制,在保证全站仪架设不对线路通行造成影响、通视良好、架设点稳定的前提下,将全站仪的架设点设定在如图7所示的位置上。

图7 全站仪架设位置
3.3 监测数据处理与分析
以截至2020年5月27日的监测数据为例,对淮河街沈医二院—皇姑屯站区间的水平位移和竖向位移进行分析。
淮河街沈医二院—皇姑屯站区间根据地质情况共布设变形监测断面10个,基于极坐标测量原理,利用多重实时差分改正模型和坐标转换对测得的监测点坐标进行计算,运行经Excel VBA编写的程序,获取区间内所有监测点的水平变化量和竖向变化量。
由监测数据反馈结果可知,该阶段所有监测点水平变化量为-0.15~0.16mm、竖向变化量为-0.20~0.20mm,所有监测点的变化量均小于1mm,该阶段所有监测点水平变化量、竖向变化量很小,监测数据显示无异常变化点位。
4 总结
文章将构建的全站仪自动监测系统应用到沈阳地铁淮河街沈医二院—皇姑屯站区间监测中,结果表明处理后的数据精度满足规范要求,监测结果准确、可靠,取得了很好的效果,具有较高的应用价值。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
科学技术创新(2021年25期)2021-09-11
现代测绘(2021年1期)2021-04-28
工程与建设(2019年3期)2019-10-10
中国医疗设备(2019年1期)2019-01-15
传感技术学报(2016年6期)2016-09-09
电测与仪表(2016年9期)2016-04-12
河南科技(2014年22期)2014-02-27
