
CVD P5000 设备Extension Encode 异常分析及处理
2021-03-11 10:15周建平
中国设备工程 2021年3期
周建平
(无锡华润上华科技有限公司,江苏 无锡 214061)
P5000 系列设备是CVD 的主要设备,因此CVD 设备状况与产能有着很大的关系。由于CVD P5000 设备使用的年限都比较长,而且因为P5000 设备的Wafer Transfer System的原因(在它的Wafer Transfer System 中需要robot、cassette、elevator、susceptor 及lift pin 五 者 之间 的密切配合),导致了传片故障的多发性,其中Extension Encode 报警处理耗时比较长,为使设备能够良好的运转,不让时间浪费在无故的消耗中,本文就P5000 设备Extension Encode 报警原因进行一些分析,以求能够帮助我们快速解决这类问题。
1 机械传动分析
1.1 Robot 传片路径及结构
在Atm 下,Robot Blade 从Cassette 取 片 经 过I/O Slit Valve 和Center finder Sensor Board 到Elevator;Loadlock Chamber 抽真空,Robot Blade 从Elevator 取片经过Chamber Slit Valve 到Process Chamber,Susceptor在Release 位置取片,Process 位置工艺,工艺完后在Lift 位 置Robot Blade 经 过Chamber Slit Valve 取 片到Elevator;Loadlock Chamber 充 大 气,Robot Blade 从Elevator 取片到Cassette,如图1。
1.2 Robot Blade Extension 传动结构
Extension Stepper Motor 正 反 转 通 过Drive Belt 到Winder Gear 到Extension Winder Spool 经过Stainless Steel Cable 带动Extension Pulley 驱动Extension Shaft正反转,从而带动Robot Arm驱动Robot Blade伸缩,如图2、3。
2 机械传动引起的Encode 报警原因和处理
2.1 机械传动引起的Encode 报警的原因
(1)Slit 阀开关不畅,则很有可能是手臂撞到Slit 阀引起的Encode 报警。
(2)Susceptor 和Lift 的升降不到位,手臂撞到Sus或Lift 会出现Encode 报警。
(3)Lift PIN 断,会导致取片时圆片倾斜手臂撞到圆片出现Encode 报警。
(4)Extension 轴承卡阻力大导致电机驱动负载增加引起电机发热不稳而Encode 报警。
2.2 机械传动引起的Encode 报警处理
(1)Slit 阀开关不畅,确认汽缸是否串气和电磁阀及气管是否漏气,调节汽缸行程。
(2)Susceptor 和Lift 的升降不到位,确认电机及传动丝杆,Home Sensor 挡片及Sensor。
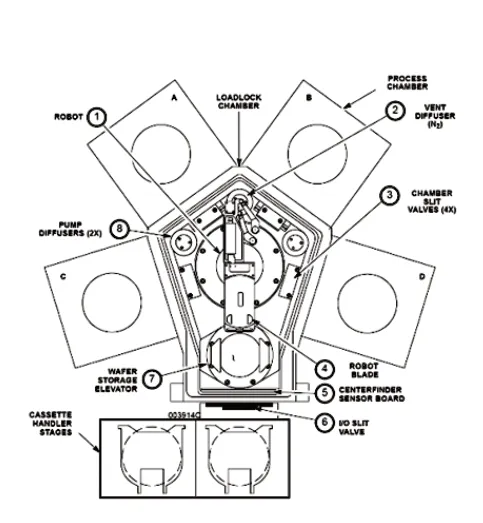
图1 R 传片路径
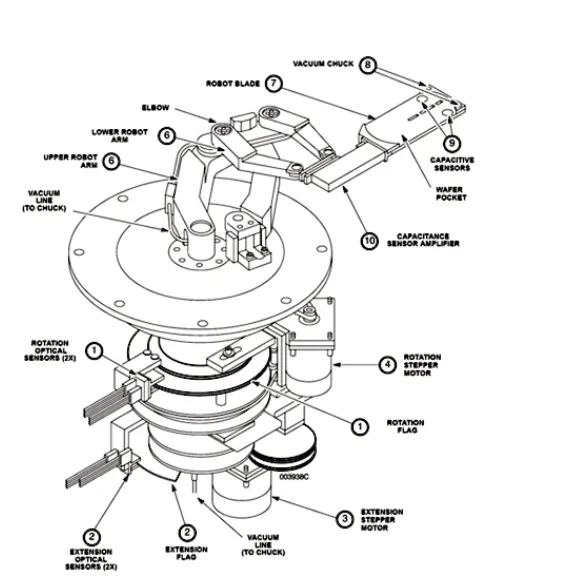
图2 Robot 结构

图3
(3)Lift PIN 断,调节好PIN 与PIN 孔距离。
(4)Extension 轴承卡阻力大,翻新手臂,润滑轴承(图4)。

图4
3 Extension 电机驱动及异常分析
3.1 电机驱动分析
DC Power Supply 给Chopper Driver Board 提 供24V和60V 电源,Stepper Control Board 收到SBC 让电机运动的步数并给Chopper Driver Board 24V 脉冲指令,Chopper Driver Board 收到Stepper Control Board 指令输出60V 脉冲电压驱动电机,如图5。
3.2 根据电机驱动线路图引起Encode 报警的原因(如图6)
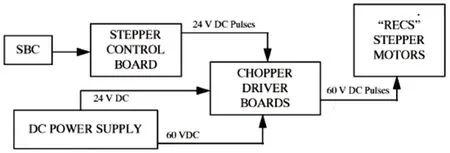
图5

图6
(1)Stepper Control Board 异常时,Extension 电机驱动电压异常导致Encode 报警。
(2)J1(P103),P100 Cable 异常引起电机驱动电压波动导致Encode 报警。
(3)Chopper Driver Board 和电机异常直接导致驱动异常而Encode 报警。
4 系统Encode 控制分析
4.1 SEI PCB Encode 控制
4.2 电机Encode 控制(图6)
Encode 输出电脉冲信号,信号输入到VME 上的SEI 板上。然后SEI 计算处理收到的脉冲信号后,发送给SBC 板。SBC板将从SEI 传过来的信号和要求电机运动的步数进行误差比较,如果比较的结果在System Constant 所设定的范围之内,则系统正常继续执行下一个动作;若误差超出范围,SBC 则发送出错的指令(送出5VDC 给DI/O 板,通过DI/O 板送出Hold 信号和驱动Brake 的信号给Chopper Driver,Chopper Driver 接收到指令后驱动电机上的刹车(Brake),使传片动作停止,出现Alarm。

图7

图8
5 系统Encode 控制异常引起的Encode 报警原因和处理
5.1 系统Encode 控制异常引起的Encode 报警的原因
(1)Encode Cable 异常引起的Encode 报警。
(2)系统控制板(DI/0 板,SEI 板,SBC 板,VGA 板)异常引起的Encode 报警。
(3)硬盘及VME 电源异常引起的Encode 报警。
5.2 系统Encode 控制异常引起的Encode 报警的处理
Encode Cable 异常确认电压,有5 个5V 电压(如图9)。
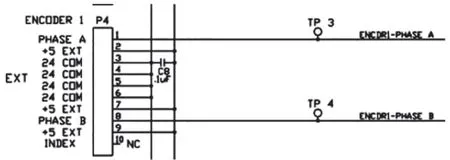
图9
电源异常可通过量电压确认。
电路板及硬盘异常需要更换确认。
6 设备干扰分析及处理
由于RF 的泄露会干扰到信号引起Encode 报警,一般更换RF MATCH 解决报警。
7 结语
Encode 报警原因有好多种,需要具体原因具体分析。首先判断Robot 位置是否到位,没有到位按照机械传动和电机驱动方向解决;到位先排除是否干扰,然后按照Encode 信号控制检查解决。Encode 报警处理好后需要校准传片。
猜你喜欢
计算机仿真(2022年7期)2022-08-22
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
湖北农机化(2020年9期)2020-01-08
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
现代工业经济和信息化(2016年7期)2016-05-17
通信电源技术(2016年1期)2016-04-16
小学生·多元智能大王(2015年3期)2015-05-25
