
基于装袋决策树的雷达点迹鉴别方法
2021-03-11 03:34:32孟文涵林强
电子技术与软件工程 2021年21期
孟文涵 林强
(空军预警学院 湖北省武汉市 430019)
1 引言
雷达设备通过雷达终端向雷达用户提供经过目标检测处理后的视频信号,其中除了有用的目标信号点迹外,还包括了大量由强低杂波、强气象杂波和仙波处理后的剩余杂波点迹。这些剩余杂波点迹严重影响了杂波环境下雷达正常的探测和跟踪性能[1]。主要影响体现在以下两个方面:一是剩余杂波点迹容易造成目标属性误判,影响雷达探测效果;二是剩余杂波点迹误判成“伪目标”与目标回波掺杂在一起,容易造成目标混淆,干扰了雷达“航迹关联”过程,影响雷达跟踪效能[2]。
目前,一些国内外的专家学者利用雷达回波特征,针对此问题做了一系列相应的研究。文献[3]提出了一种智能化恒虚警率检测器,通过支持向量机(SVM) 技术使得检测器可以选择适合当前环境的门限,以提高不同背景下的雷达目标检测性能;文献[4]中,刑远见等人对强杂波环境下,信号处理后残留大量虚警的问题,通过提取目标和杂波的分类特征,将主成分分析法和支撑向量机两种算法结合起来滤除虚假点迹,抑制了大量的剩余杂波点迹。文献[5]提出的基于SVM 的多雷达数据机器识别方法实现了对雷达探测数据的自动分类处理。文献[6]提出了一种基于BP 神经网络的雷达点迹分类器。这些研究方法为雷达目标点迹和剩余杂波点迹的区分提供了技术参考,但都存在一些难点问题。例如文献[3]和文献[5]对雷达点迹分类精度较低,文献[4]在杂波抑制中,目标损失较大。文献[6]的训练过程较繁琐,且受数据影响性较大的缺点。
本文针对目标检测后的剩余杂波过多干扰雷达效能发挥的问题,提出了一种基于袋装决策树的雷达点迹真伪鉴别模型。该方法可以对雷达终端中经过目标检测后进一步区分目标点和杂波点,提高目标鉴别的质量。该方法利用了装袋决策树强大的学习能力,为雷达点迹训练分类模型,实现了对目标点迹和杂波点迹的较高精度的自动识别处理。雷达点迹数据中包含多普勒速度、原始幅度、背景幅度、滤波标志、恒虚警类型、杂噪比、滤波器组选择和EP 质量等特征信息,使用袋装决策树开展点迹特征信息分类训练,测试了在不同特征组合下的目标点和杂波点的鉴别精度和装袋决策树在点迹鉴别中泛化能力,并与K 最近邻域法(Knn)、支持向量机(SVM)和BP 神经网络(BPNN)作了对比分析。最后,本文给出了3 个结论。
2 袋装决策树
决策树是一种的变量分类方法,决策树的核心思想是在一个数据集中找到一个最优特征,然后从这个特征的选值中找一个最优候选值,根据这个最优候选值将数据集分为两个子数据集,然后递归上述操作,直到满足指定条件为止。装袋决策树实质是自助抽样法,该方法多次放回抽样,便于减小方差,是一种比较常用决策树分类法。假定Z1、Z1、Z1、Z1为n 个独立的观测值,方差为σ2,平均值Z 的方差,因此,为减小方差,从总体样本集用自助法选择多个数据集作为训练集,进行模型拟合及预测,求出多个模型预测结果的平均值,如B 个训练集预测分别为求其平均为[7]:
装袋法算法具体步骤如下[8]:
(1)假设k 为样本集的数目;
(2)生成k 个大小为n 的数据集,每个自助样本集都和原数据集一样大;
(3)在k 个样本集上训练分类器;
(4)投票决定分类结果。
3 雷达点迹信息数据
3.1 雷达点迹特征提取
本文采用的雷达点迹数据为从某型雷达终端上采集的报文数据。经过规定的格式解析,得到包括多普勒速度、点迹原始幅度、点迹背景幅度、滤波标志、恒虚警类型、杂噪比等级、滤波器组选择和EP质量共计8个特征属性的点迹信息。八种特征属性解释如下:
(1)多普勒速度反映了目标相对雷达的径向速度。通常运动目标相对雷达有一定的多普勒速度,而杂波的多普勒速度一般较小,甚至为零,这样运动目标和杂波就能从多普勒速度上进行区分。
(2)点迹原始幅度表示的含义为雷达原始回波信号经过信号处理后的每个处理单元的原始幅度值。
(3)点迹背景幅度表示的含义为根据多次扫描估计的方位-距离单元的杂波背景强度,即杂波图幅度。杂波回波点迹相对集中的区域杂波背景强度比较强;而目标回波点迹相对集中的区域杂波背景强度略低。
(4)滤波标志代表该雷达在信号处理过程中,根据杂波背景环境的不同将滤波分为清洁区滤波、弱杂波区滤波、中等杂波区滤波和强杂波区滤波。
(5)恒虚警类型主要有噪声恒虚警、单元平均恒虚警、单元平均选大恒虚警、和杂波图恒虚警。根据目标、杂波环境的不同,选用不同的恒虚警类型。
(6)杂噪比所表示的含义为杂波与噪声功率的比值,可以反映出回波点迹背景环境的复杂度。
(7)滤波器组选择指的是面对不同的目标、杂波背景环境,根据雷达信号处理中MTD 滤波器组的选择,将滤波器组分为超强滤波器组、强滤波器组、中等滤波器组和弱滤波器组。
(8)EP 质量是对雷达点迹的EP 数量、方位展宽、距离展宽和信噪比等特征参数进行加权求和得到的。
3.2 数据处理
这些解析出的雷达点迹信息有一些明显异常的值。为了降低计算量并提高点迹的鉴别精度,首先需要对异常值进行剔除。为探究装袋决策树模型在不同目标和杂波分布环境中的鉴别效果,选取雷达工作区域中三个扇区,其点迹数目构成见表1,其杂波与目标数目比值分别约为1:4、1:1、2:1。

表1:三个扇区点迹数目构成
4 基于装袋决策树的雷达点迹鉴别实验效果
本文实验在Win10 操作系统和Matlab2020b 环境下,采用Classication Learner 工具箱,开展训练,并使用并行运算加快训练速度。
4.1 扇区内雷达点迹实验效果
我们分别将三个扇区的点迹信息按照3:1 划分训练集与测试集。使用工具箱对点迹信息的不同特征属性组合开展分类训练,训练与测试效果如表2、3、4 所示。
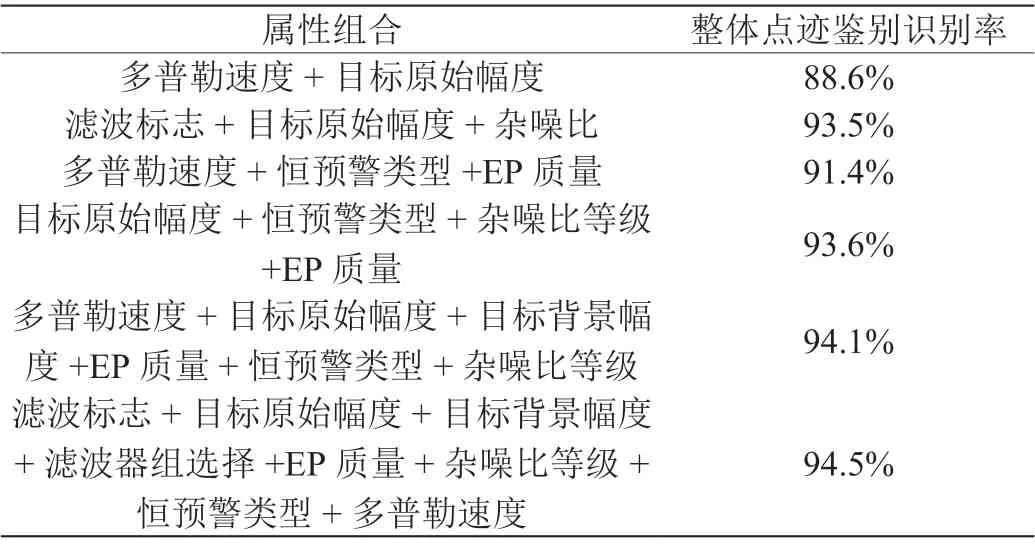
表2:扇区1 不同属性组合的鉴别识别率
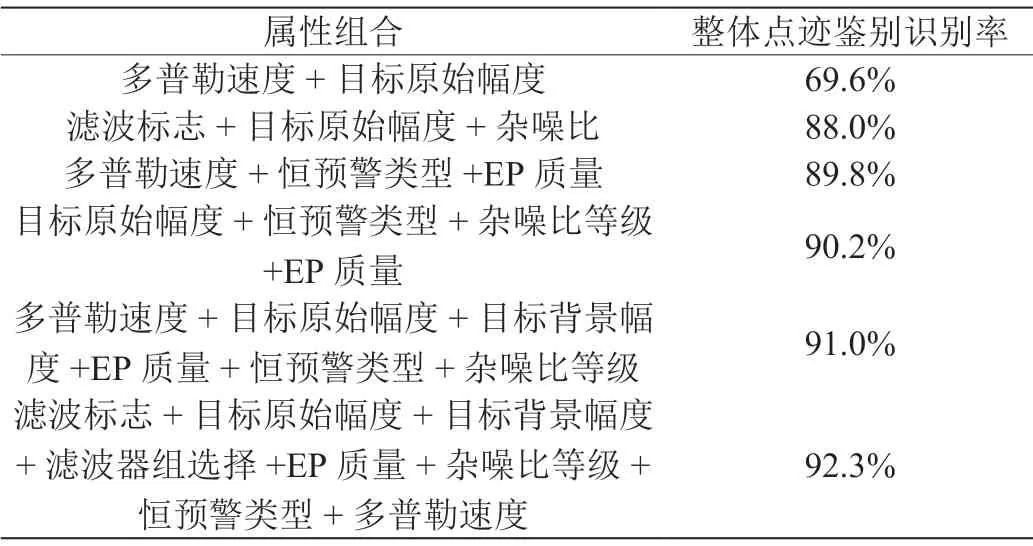
表3:扇区2 不同属性组合的鉴别识别率

表4:不同属性组合下PSO-PNN 鉴别识别率
从表2、3、4 中,我们可以看出,在袋装决策树对三个扇区的雷达点迹鉴别中,复杂组合的鉴别效果均优于简单组合,在复杂组合中,8 属性组合的鉴别效果均优于6 属性组合。三个扇区整体识别率识别率分别达到94.5%、92.5%和89.1%。因此,可以得出:当属性组合数越多时,装袋决策树网络识别效果越好。这就意味着模型获得的样本有效属性维度越多,信息质量越好,对目标点迹和杂波点迹的区分将会愈加有效。同时,三种不同目标杂波分布的扇区的点迹鉴别效果不同,整体鉴别率随着目标比例的提高也随之提高,说明装袋决策树对目标的识别更敏感。三个扇区的雷达点迹8特征属性鉴别混淆矩阵如表5、6、7 所示。

表5:扇区1 鉴别效果混淆矩阵
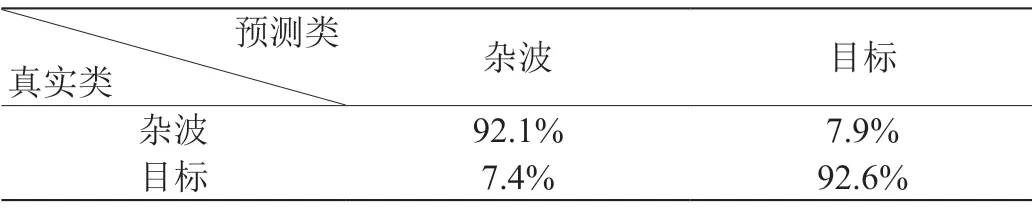
表6:扇区2 鉴别效果混淆矩阵

表7:扇区3 鉴别效果混淆矩阵
4.2 装袋决策树对雷达点迹鉴别的泛化效果
为研究装袋决策树对雷达点迹分类的泛化效果,这里分别采用装袋决策树对杂波目标数目比1:4.、1:1、2:1(“弱杂波”、“正常杂波”和“强杂波”)的三个扇区的点迹信息分别进行8 属性组合的夸数据集训练与测试,研究结果见表8。

表8:泛化效果测试
从表8中,我们可以看出,通过三种不同目标杂波分布的扇区互相训练和测试的结果,我们可以看出即使训练集与测试集分类分布不统一,装袋决策树依然可以取得不错鉴别效果,说明装袋决策树对雷达点迹鉴别具有良好的泛化能力。
4.3 与其他鉴别方法的比较
由于雷达的点迹鉴别的实质是一个二分类问题,所以其他二分类方法都可以用作尝试。作为比较,本文还利用K 最近邻域法(Knn)[9]、支持向量机(SVM)[10]和BP 神经网络(BPNN)[6](五层)来对雷达点迹进行鉴别检测。为了简化研究过程,本文采取扇区二(目标杂波分布相对均匀的情况)的雷达点迹的8 特征信息组合作为鉴别数据,鉴别效果如表9所示。
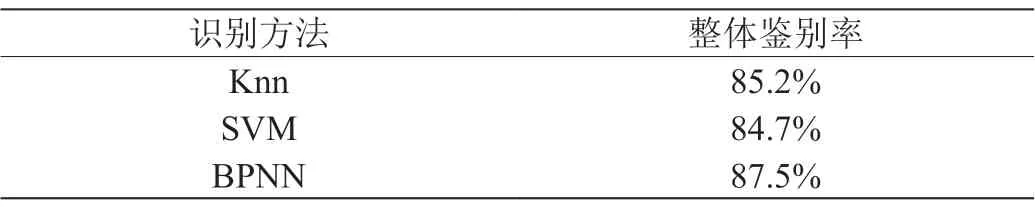
表9:其他鉴别方法实验效果
经实验发现,SVM 最近邻域法的鉴别精度达84.7%,位居三种对比实验效果中的最后一名。Knn 的鉴别精度略高于SVM 达85.7%,五层BP 神经网络在三种对比实验中效果最佳达87.5%。因此,三种对比实验效果均低于装袋决策树。由此可以看出:装袋决策树在雷达点迹鉴别上具有一定的优越性。
5 结束语
本文利用袋装决策树,搭建了一种雷达点迹真伪鉴别模型。同时,测试了不同属性组合和不同分布的数据集对优化后模型鉴别效果的影响及泛化效果。最后,将装袋决策树的雷达点迹鉴别模型鉴别效果与其他方法进行比较。可得到以下结论:
(1)复杂特征组合的鉴别效果由于简单特征组合的鉴别效果。
(2)袋装决策树对雷达点迹鉴别效果会受数据集内部分布情况影响,整体识别率会随集内目标数目比例增大产生一定幅度的上升。
(3)基于装袋决策树的雷达点迹鉴别模型具有良好的泛化能力。
(4)基于装袋决策树的雷达点迹鉴别方法能够有效对雷达点迹进行鉴别。相比于BP 神经网络、SVM 和Knn 的识别率更高,这种算法可以为雷达的点迹鉴别等实际工程应用问题提供了新思路。
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
中学物理·高中(2021年3期)2021-06-06 07:25:18
中国食用菌(2020年9期)2020-11-11 04:55:40
火控雷达技术(2019年1期)2019-04-11 06:35:00
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
农家之友(2018年4期)2018-01-30 17:47:26
中国科技博览(2017年31期)2017-09-20 07:56:08
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
