
冰区船舶模拟航行设计与自动评估方案
2021-03-10 13:33:50周建文赵炎平席永涛
中国航海 2021年1期
周建文, 赵炎平, 席永涛
(1.集美大学 航海学院, 福建 厦门 361021;2.中国极地研究中心 船舶与飞机管理处, 上海 200136;3.上海海事大学 商船学院, 上海 201306)
从2020年7月1日开始,船长、大副和值班驾驶员只有持冰区航行培训证书或具有相应冰区实船航行经验才能在南北极冰区航行。[1]根据《国际极地水域营运船舶规则》[2](简称《极地规则》)的要求,极区水域的油船和邮船在1成冰以下且没有陆源冰的“开阔水域”航行时,船长、大副和值班驾驶员需参加基本培训,而其他类型船员无需参加任何培训;在2成冰以上的“其他水域”航行时,不管是油船、邮船,还是其他船舶上的船长和大副,均需参加高级培训,值班驾驶员需参加基本培训。
但上述规则、国际海事组织(International Maritime Organization, IMO)编制的示范课程7.11[3]和《海员培训、发证和值班标准国际公约》、(International Convention on Standarks Training, Certification and Watchkeeping for Seafarers, STCW)(简称《STCW公约》)关于使用模拟器的指南也只规定这些培训的框架性内容和模拟器的最基本要求,没有对在模拟器上进行的详细教学内容、练习任务设计和场景的具体要求做出规定,更没有指出适任能力的关键性评估指标,给冰区航行模拟器的研发和实践教学带来很大的困扰,尤其是无冰区航行经验的教学和开发人员,对这些框架性内容的理解更容易出现较大的偏差。鉴于此,本文以《STCW公约》《极地规则》和IMO示范课程中关于极区水域基本培训的相关内容为研究对象,充分考虑冰区航行事故类型和在国外培训过程中学员常遇到的问题,结合极区水域航行经验和实船极地操作手册[4],在已有的航行模拟器研发和实践教学经验的基础上,凝练出完整的极区水域基本培训模拟器实操强化内容,设计3个典型的模拟航行任务及相应的模拟航行场景和关键性评估指标,初步提出构建我国A级航行模拟器自动评估体系的方法,为冰区航行模拟器的研发和实践教学提供一套系统且全面的需求方案。
1 极区水域模拟航行任务设计
1.1 基于规则要求的模拟器实操内容
《STCW公约》强制实施部分的附表A-V4-1规定了在极区航行基本培训中要掌握的基本知识和技能;培训指南B-V4部分列出了船长和驾驶员在极地航行船上任职前必备的基本知识,包括识冰、船舶性能和在冰区操纵船舶等10个方面的要求;《极地规则》A部分第12章规定了配员和2类培训课程适用的对象及其任职要求等;示范课程7.11给出了基本培训的课程目标、课时分配和课程框架,并在课程内容4-冰中操作和6-破冰船辅助2项中要求了7个课时的模拟器训练,见表1。由表1可知:能在模拟器上进行的教学内容有冰区操纵和破冰船护航操作,共计7个学时的模拟操纵训练。
1.2 基于实践需求的实操内容
俄罗斯尼维尔斯特海事大学在极地船舶操纵模拟训练方面具有丰富的经验,其培训统计数据表明:在极地航行操纵模拟训练中,因让冰操作不当或不及时约占20%;冰中迷路、错失机会进入清水或大范围冰区、损坏船体等冰中航行不熟悉的占26%;冰情分析不当或不及时导致找不到航路受困等占16%。[5]这些统计数据都为极区水域船舶操纵模拟要点和相应的评估指标提供了可借鉴的依据,见图1。
SOUTHWELL[6]于2017年统计的冰区海上事故类型反映出损坏舵和车叶引起的事故在所有事故中的占比高达42%,其中:螺旋桨受损达30%;撞击冰山、多年浮冰等达22%;舵叶受损达12%;因让冰不当致使船壳受损达16%。冰区航行海上事故类型和比例见图2,这些统计数据为极区水域模拟航行任务设计和评估指标提供了良好依据。

表1 基本培训示范课程项目及课时安排

图1 极地航行受训学员失误类型和比例
1.3 模拟航行实操内容与训练任务
1.3.1实操内容

图2 冰区航行海上事故类型和比例
《STCW公约》对值班驾驶员提出了安全操作船舶、法律法规要求、应对突发事件和环境保护等4个方面的适任要求。具体在执行适任能力培训时,示范课程7.11建议从9个方面进行理论与实训教学(如表1所示),其中第4项、第5项和第6项可在模拟器上进行实训,但“航行计划和报告部分”不涉及计划的具体制订,要求学员根据计划执行即可,可将其整合到第4部分中进行整体安排。另外,极区船舶航行模拟器实操有必要有针对性地将第1.2节涉及的国外培训机构总结的船员常见操作失误和实际极地海上事故种类整合到极区船舶航行模拟器实操内容中,以提高船员在实操中的相应能力。因此,用于开展极区水域基本培训的航行模拟器的实操内容可设计为以下3个方面:
(1)进出冰区的船舶操纵包括对出入冰时的速度和角度的控制。
(2)穿越冰区的操作内容包括:对速度和航向的及时控制;避免舵、桨和船体损坏的后退、顺势操纵;冰区综合导航方法,该方法是极区水域船舶值班驾驶员基本培训的主要内容,要求学员会利用驾驶室内的各种资源进行安全导航,使船舶沿着既定航路的大致方向航行,包括使用探冰灯、雷达回波探冰、独立的冰图或电子海图上叠加的冰图等冰情资料、冰雷达(如装配)等模拟设备或辅助工具,结合视觉系统观察识别冰山、冰脊、冰岩和冰间水道或湖等影响船舶安全的主要冰情;保持船舶连续航行,避免船舶受困。
(3)破冰船辅助操作包括:与破冰船间通信的设备和方法的使用;与破冰间的安全距离控制;护航过程中的速度控制。
1.3.2训练任务设计
这些模拟实操内容需辅以相应的实操训练任务,让学员在完成训练任务过程中掌握相关的知识和技能,结合中国“雪龙”船和“雪龙2号”船南北极水域航行经验和水域的实际情况,训练任务设计如下。
1.3.2.1 稀疏浮冰区航行
PC6级单浆极区客船计划穿越前方4~6成分散的1 a浮冰区,冰区中分布有冰山、冰岩、碎冰和不同程度的乱冰。水域内有北风5级,强流2~3 kn,能见度良好。尽量利用清水和薄冰航行,以顺利穿越冰区。
1.3.2.2 密集浮冰区航行
傍晚时分,PC6级极区客船按计划航线穿越前方7~8成1 a浮冰区,这些浮冰中分布有巨型冰山、小冰山、冰岩和厚度不一的冰脊,浮冰中有可用的冰间水道和薄冰。所在水域有北风5级,强流2~3 kn,前方有大雪,可能导致能见度低下。调用计划好的航线,按航线大致方向航行,利用冰间水道,避开冰山、冰脊、冰岩和厚浮冰等危险冰况,尽量保持连续航行不被冰困住,成功穿越冰区。
1.3.2.3 破冰船护航操作
PC7级单浆极区客船随着破冰船穿越一片固定冰区,该冰区内有各种冰脊和冰山,破冰船有可能停下来撞击破冰,按破冰船的指令调整和控制本船与破冰船之间的距离和航速,成功穿越冰区。
2 模拟场景设计
在极区水域船舶航行模拟器实操内容中,除了调用相应冰级的船模供学员操纵以外,需还提供航行水域、相应冰况和极地特有的通航环境,通航环境包括极地典型的风流变化、高纬度的昼夜变化、影响能见度的雨雪雾、阴暗天气、两极典型水上动物和极地航用资料等。
2.1 水域设置
《极地规则》规定60°S以南及60°N纬度线和北大西洋多个点的恒向或大圆连线以北的水域为极区。训练水域应设计在这些水域内,并考虑以下几个方面的因素。
1)极区水域的高纬度水文气象特点、昼夜变化和测绘数据不详尽的海图等。
2)注意训练水域冰情设置应尽量符合以下实际情况:北极水域以浮冰为主,冰山规模较小且集中在加拿大东部和格陵兰东西海岸;在南极的一个水域内可布置各种类型的浮冰、冰山、冰脊和冰岩等冰况。两极水域的气候特征、海冰类型和特点存在明显的不同。
3)需根据现成的数据编制冰情资料,供学员训练时使用。如何使用冰情资料是重点训练的内容之一。但是,受学时数限制,训练水域范围较小,需完整地布置从稀疏、密集到复杂的极区训练场景和任务,靠原始的大范围船用冰情资料难以做到有效匹配。为匹配小范围覆盖全类型冰况,需考虑利用冰区航用电子海图显示与信息系统(ICE Electronic Chart Display Information System, ICE-ECDIS)的辅助功能,在电子海图显示与信息系统(Electronic Chart Display and Information System, ECDIS)模拟器上显示定制的模拟冰图和气象资料。
此外,在设计训练水域大小时,需结合相应冰况中实际的航速。推荐按以下范围设计冰区水域,即:稀疏冰区8 kn航行1 h,共8 n mile;密集冰区5 kn航行3 h,共15 n mile;固定冰或9~10成冰区3 kn航行2 h,共6 n mile;3个任务共需约30 n mile的训练水域即可。另外,《STCW公约》并没有包含破冰船引航业务的相关培训内容,只从非破冰船的角度考虑培训内容,不利于中国破冰船破冰引航业务的熟悉,建议在高级培训中增设破冰船破冰引航相关内容的培训。
2.2 冰情定制
极区水域船舶航行模拟器实操内容主要是冰区航行,因此设置相应的冰情是模拟场景设计的关键环节。但是,现成的冰情资料范围大,局部水域难以完整,包括碎冰、冰山、冰岩、冰脊、冰间湖、冰间水道、冰裂缝、冰丘、浮冰带、密集浮冰区及一定范围内的固定冰等冰况。[7-8]冰区航行模拟器应考虑上述各种冰的可视化和冰情的参数化设置界面(可视模拟器而定),并根据在实际极地冰区航行过程中遇到的典型操作要点设计训练水域内的冰情,如船舶舷侧压力预判训练的位置点布置、避让冰时的转向幅度、浮冰中冰山的提前考虑、冰间水道的分布、冰区中薄弱环节的合理布置和第1.2节所述各种错误等,推荐定制如下。
2.2.1稀疏冰区
应布置各种大小且形状各异的冰山、危险冰岩、冰山下风方向的碎冰、受风影响显著的浮冰带和天空中有明显冰光的小范围浮冰,见图3。
2.2.2密集浮冰区
应布置厚度、范围和平整度都不同的浮冰,以及训练学员在大范围浮冰内寻找行进方向的冰光、局部清水上空的暗色天空和可能误导学员的巨型冰山上风方向的清水区等,设置后的整体印象(见图4)。
结合通航环境,布置夜晚、下雪或雾等可能导致能见不良的复杂环境,培养学员在密集浮冰区中对冰的深刻认识、减少冰对舷侧压力的操船方法和利用当前水域的视觉冰况对比冰图资料,培养学员在密集浮冰区中通过视觉观察进行导航的能力。

图3 稀疏冰情定制

图4 密集冰区定制
2.2.3破冰船辅助航行冰情
选择符合实际的水域,布置一段固定冰或9~10成冰的冰情。这种冰情可参考“雪龙2号”在中山站前沿水域为“雪龙号”破冰准备货物运输路线时的固定冰。[9]提供这样的冰况环境主要考虑的是破冰船中途受阻时尾随船速度和尾随船与破冰船间距离的控制、与护航船的配合操纵和破冰船引航等业务的训练。
2.3 通航环境设置
以南北极夏季航行为主,考虑极地高纬度冰区水域明显的通航环境,如频繁地下雪或下雾、多数时段低层云笼罩极区水域等。整体上呈现阴恶、能见度较差、水温和气温低下及特殊日照现象的天气[7, 10-14],具体设置如下。
2.3.1空中天气要素
主要考虑设置气温、雾或雪、日照时间、按规律变化的风(布置典型的极区气旋即可)和低层云等5种基本要素,并在模拟驾驶室内的相应仪器设备中呈现。
2.3.2海面环境要素
除了上述各种类型的海冰以外,主要考虑海水温度、下雪或下雾导致的能见度低下、甲板和海冰积雪、冰区不同阶段的海浪和涌浪、所在水域存在的典型洋流、极地海上动物等6种环境要素。
2.4 船模准备
模拟航行任务会用到PC6级和PC7级船舶类型,而破冰船类型采用PC3级船模自动航行,或由教练员、指定的破冰船学员团队进行破冰引航。限于冰区航行仿真技术水平,可采用业务模拟、部分物理行为仿真和参数建模混合进行。在冰区模拟场景下,安全操纵船舶是模拟航行的重要内容,可通过跟踪,记录船舶在航行过程中的行为和状态,包括螺旋桨、舵叶和船体完整度,位置、速度、航向、横倾角、冰区综合导航设备使用记录和语音对话等数据,由此评估学员是否具备在冰区安全航行的能力。目前,国内外的航海模拟器能较好地仿真船舶姿态,包括位置、速度、航向和横倾角等,但螺旋桨和舵叶受损后仿真船舶行为较难,至少应通过其他方式加以体现。
2.4.1螺旋桨受损船舶行为要求
在相同车钟命令下,根据受损程度,输出功率逐渐减少,按一定步长衰减,加车时间变长,能向使用人员呈现视觉和听觉感受,转速相应发生变化、振动感(根据受损情况)和模拟驾驶室内环境声音发生改变等,直至最终失去动力。
2.4.2舵叶受损船舶状态要求
在相同航行环境下,按舵叶变形损坏的程度或形式,使舵效变差,用更大的舵角才能达到预期,无法按使用人员的经验和习惯操舵,船舶的旋回要素发生变化,直至没有舵效。
2.4.3船体损坏船舶姿态要求
由于船体受冰撞击时的应力计算较为复杂,建议在设置冰情参数时,根据沿线的冰类型、厚度和硬度等参数,结合撞击时船舶的质量和航速计算相应受力情况,映射为简化船体包围盒的损坏程度,直至进水倾斜,甚至沉没。
不同品牌的模拟器采用不同的模拟或仿真算法,操作方法也各不相同,但建议在参数化航行任务阶段,在模拟器的教练员端或独立的自动评估系统中对上述参数进行设置。
2.5 辅助资料准备
准备在训练过程中会用到的典型冰图、必要设备和图书资料,包括:在模拟驾驶室内提供冰情资料,如不来梅冰图、光影图和合成孔径雷达(Synthetic Aperture Radar, SAR)图像;运用电子版资料在雷达或电子海图上自动叠加呈现,为学员提供分析行进方向的资料。雷达模拟器需提供相应冰区的雷达回波;电子海图模拟器上呈现当前位置的水上、水下要素和冰情资料;测深仪实时跟踪当前位置的水深变化,以培养学员在海测数据不充分时的安全意识,如配置冰雷达和水下探冰设备的模拟器,也可准备模拟信号,为冰山识别提供更逼真的训练环境。这些准备是基于真实航行环境简化设计的,会受限于各培训机构使用的模拟器功能完善度,但基本的冰况、天空与海面基本要素和模拟驾驶室常用导航设备是必要的。
3 模拟航行的组织和评估
3.1 模拟航行组织
IMO 示范课程7.11建议基本培训总课时为34个课时,模拟器实操课时为7个课时。考虑国内船舶操纵模拟器试验课时的习惯安排和培训场地船舶操纵模拟器最低配备要求(1艘主本船和4艘副本船)的客观条件,模拟航行课时安排为8个课时,为期1 d,具体设计见表2。

表2 模拟器实训课时安排
根据3个训练任务的要求,在极区船舶航行模拟器上设置好相应的训练水域、各种冰况、通航环境要素和相应的动态参数等练习场景。以4艘副本船为1组,每组4~5位学员的方式,调用相应冰级的船模,根据训练任务要求设置好船舶的初始位置,绘制好初始航线,完成后命名保存练习,按时间安排组织模拟航行如表2所示,具体可根据在航海模拟器上进行的综合实践教学方法安排。[15]
3.2 评估指标和流程
模拟极地冰区航行主要用于训练学员在冰区中安全航行,在有限的时间内避开冰山、大范围浮冰等危险冰情,沿着要求的大致方向安全穿越冰区,未造成严重的船舶损坏。评估时主要评估受训学员的冰区综合导航能力、危险冰情识别能力、冰区中船舶操纵能力和在破冰船辅助下的航行能力等4个方面的适任能力,见表3。
在具体评估时,可根据上述评估指标进行人工评估。同时,国家海事局新标准要求的航海模拟器必须具备自动评估功能,在航海模拟器上进行实操培训也应采用自动评估的方式。但是,传统的自动评估方法多利用最后阶段的实操评估考试数据进行评价,未考虑学员平时的训练质量。在团队前期实训项目ECDIS、全球海上遇险与安全系统(Global Maritime Distress and Safety System, GMDSS)、航线设计航海仪器船舶驾驶台资源管理(Bridge Resources Management, BRM)等模拟器训练自动评估方法[16]的基础上,借鉴神经网络在飞行模拟器训练质量智能评估[17]的成功应用和航海模拟器智能评估中的应用新思路[18],提供一种基于神经网络的智能评估方法。
该方法连续跟踪学员操作过程中的登录退出行为、仪器使用、车舵操作和语音等记录,自动生成学员实训过程数据库和上述评估指标,按以下方法生成评估模型:
1)通过前期处理和归一化操作后形成神经网络输入层输入数据Xi。
2)4种适任能力分值作为输出层的输出数据Ok。
3)中间隐藏层与输入和输入层间的权重分别为Wij和Wjk。
4)专业评估人员对上述抽样操作数据(样本数据)进行人工评分,其结果作为Ot。
5)以Sigmoid函数作为传递函数或激活函数进行试验 (yi为各层网络输出,xi为各层网络输入),表达式为
sigmoid(y1,y2,y3,…,yn)=1/(1+exp(-X(x1,x2,x3,…,xn)))
(1)
6)网络结构采用常用的3层网络结构,输入Xi、Wij和Wjk之后,计算输出为Ok,表达式为
(2)
7)梯度下降的方法较多,试验采用误差的平方E=(Ot-Ok)2作为剃度下降方法,以尽量减小超调。对E进行微分处理之后得到每次调整中间层和输出层间的权重,输入层和中间层的权重调整与此类似,表达式为
(3)
式(3)中:α为学习率;Oj为中间层输出。
通过对输入样本进行多次学习,自动调整Wij和Wjk,得到符合误差要求的2个权重矩阵—评估模型,将2个权重矩阵和学员实时关键指标矩阵Xi代入式(3),实时计算出学员的阶段性成绩,流程见图5。
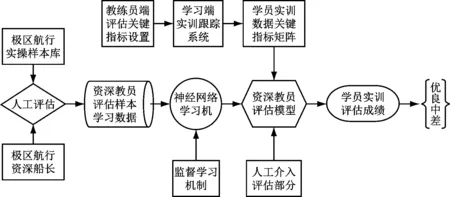
图5 自动评估方法的基本流程
4 结束语
本文以模拟极区水域船舶航行的船舶操纵模拟器为研究对象,在国际公约和示范课程的框架下,借鉴国外极区水域航行模拟操作统计数据和极区船舶事故资料,结合我国南北极科考船航行经验,设计极区水域船舶模拟航行的船舶操纵培训内容、模拟航行任务、虚拟场景布置方案、模拟航行质量的关键性评估指标和基于航行过程的自动评估方法,为国内冰区航行的履约培训、评估考试和相应模拟器的开发提供参考,尚未对自动评估方法涉及的神经网络学习机制和获取自动评估模型的算法进行详细的介绍,尤其是学习样本数据获取、自动学习算法实现等内容,这将在以后的工作中深入研究。
猜你喜欢
科学24小时(2023年10期)2023-10-15 01:22:24
珠江水运(2023年3期)2023-03-04 16:28:28
吉林电力(2022年1期)2022-11-10 09:20:48
能源工程(2022年2期)2022-05-23 13:51:44
环境技术(2021年2期)2021-07-03 14:54:00
中国水利(2020年23期)2020-12-24 06:24:40
火力与指挥控制(2019年11期)2020-01-08 03:33:10
东坡赤壁诗词(2018年2期)2018-05-10 11:08:24
中国惯性技术学报(2015年1期)2015-12-19 13:11:49
珠江水运(2015年3期)2015-05-08 15:29:37
