复杂城区车载激光扫描点云分层路段定位与数据纠正实验研究
2021-03-09 07:56王胜利郝国建杨红军
测绘工程 2021年2期
王胜利,郝国建,蒋 毅,孙 磊,杨红军
(江苏省地质测绘院,江苏 南京 211102)
近年来,以车辆为搭载平台,集成GNSS、INS、激光扫描仪(Light Detection and Ranging,LiDAR)、成像系统(如CCD相机)等多种传感器和设备,在载体移动过程中,快速采集道路及两旁地物的点云数据和影像已成为国际上的研究热点[1-3]。国内外的研究机构也相继推出了不同型号的车载激光扫描系统,已经在城市空间信息获取、三维城市建模等方面发挥了巨大的作用[2, 4, 5]。
基于多传感器集成的车载激光扫描测量系统是城市空间地理信息采集的一项重要技术,已广泛用于街景数据采集、市政管理和道路测量等领域[3]。本文的采集设备AS-900HL和基站采用的多频多系统GNSS,能够接收到GPS/GLONASS/BDS等信号,很大程度上弥补了单系统卫星数的不足,在城市环境下可以得到更高的定位结果[6]。然而,在车载激光扫描测量系统普及和实际应用过程中还存在着一些问题:①尚未对GNSS定位性能与点云数据精度之间的影响规律深入研究;②复杂环境下系统点云数据质量下降严重。目前,国内外学者多从微观尺度上研究仪器自身存在的误差,或侧重点云数据在某一特定项目中的应用情况,对项目生产过程中点云精度评定及纠正环节的误差缺乏关注[2, 7-12]。
鉴于此,本文拟从项目生产中的关键难点入手,通过分析定位信号与点云质量表征的关系,总结出点云分层路段快速定位方法,并基于点云精度纠正软件CoRefine给出最佳的纠正方案,为城市复杂环境下的车载激光扫描提供助益。
1 试验方案设计与数据采集
1.1 试验方案设计
试验扫描区位于西安市雁塔区,属于闹市区,人流量、车流量较大,研究区内高楼林立、树木密集、高架桥众多,属于典型的复杂城区环境。控制点利用RTK实时差分定位系统进行采集,根据实际地理环境特点决定分布的距离,通常情况下60~100 m在道路两边布设一个点对,考虑到十字路口较为开阔,因此,十字路口尽可能全部布设控制点以方便后期数据处理。为避免车辆非正常行驶等(如转弯和静止)对数据质量带来的影响,进行采集线路规划时,道路十字路口应尽量直行,如图1(a)所示,避免转弯;T字路口尽量右转,如图1(b)所示,减少因等红灯而停车的时间。此外,规划范围应适当外扩以便给扫描车转弯及掉头提供充足的空间,保证扫描范围内的数据质量。

图1 路线规划示意图
1.2 数据采集及预处理
试验区内白天道路上人流量、车流量巨大,会对扫描车正常行驶带来极大不便,且大量的车辆会遮挡路面上的井盖、标线等部件信息;因此,本文采用夜间扫描(2019年10月16日夜间23时—凌晨2时)的作业方式对研究区内主要道路进行采集。规划线路总长度66.8 km,采集时转速设置为200 转/s,激光点频为550 kHz,有效射程为300 m,视场角选择为0°~360°。

图2 研究区概况
如图2所示,在安装好设备、架设好基站(图中黄色钉子)后,按照提前在Google Earth上规划的路线进行扫描,行驶速度约30 km/h,采集时长约130 min,采集点云大小54.6 G,工程命名为2019-10-16-151914。作业采用华测中绘i70小型化智能接收机,接收GPS/GLONASS/BDS/Galileo4系统的信号,采样率为0.2 Hz。采集结束后,导出激光和基站数据,首先利用CHCData将基站数据由.HCN文件转换为rinex格式,再利用Inertial Explorer软件进行POS解算,之后利用CoPre软件解算数据得到.las格式的点云。图2(c)所示为本文的纠正试验路段。
2 多指标协同指示的点云分层路段定位
对采集的点云数据进行质量评价对后期处理与应用至关重要,然而,海量的数据给评价带来极大困扰,若全部路段布设控制点需要大量的外业人员,耗费人力物力。针对此,本文选取了Inertial Explorer软件的几个关键指标进行点云分层路段的快速定位,极大地提高了工作效率,大量的实际应用表明该方法的可靠性、优越性。
2.1 点云分层
点云分层表现为台阶效应,即扫描车往返采集的同一地物在高程或者平面上错开一定距离的现象。同名点的平面与高程误差为不同车次间的拼接误差,点云分层分为平面分层和高程分层,通常情况下,平面分层和高程分层同时存在。
2.2 多指数协同指示法
单一的精度指示因子(如PDOP值)存在随意性强、灵敏度差、准确度低等缺点,且受复杂地理条件的影响,单一因子的普适性较差,而多指标联合投票法能够显著改善以上不足,本文的多指标协同指示法的点云分层路段定位流程如图3所示,选取的指示因子主要包括联合误差、位置估计精度、固定解/浮动解、卫星颗数和PDOP值。通常情况下,POS解算后的一些关键指标具备直接或间接判断点云质量优劣的能力,若能够根据这些关键指标快速判断处分层所处的路段并将分层等级进行预测,将大大提高点云数据纠正的效率,减少外业布设控制点的强度。已有研究表明,行车环境中存在的信号干扰,导致定位结果出现不同程度的偏差,不同的环境复杂程度使定位结果呈现不同的精度水平[6]。复杂的城区环境进而导致点云数据质量存在极大的不确定性,且定性分析较为困难,其原因主要在于GNSS定位解的收敛和重收敛时段内存在较多采集时难以顾及的复杂多变的环境因素,该时段的长度取决于仪器的性能,通常为30 s。此外,频繁的信号中断导致惯导性能降低。
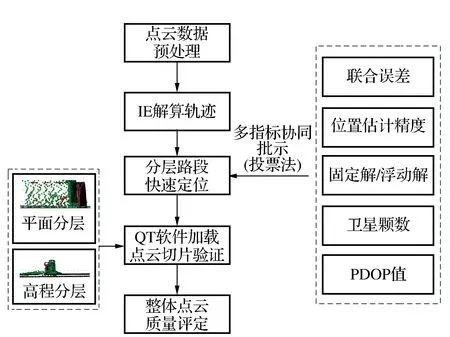
图3 多指标协同指示法的点云分层路段定位流程
2019-10-16-151914工程采集路线的5种指示因子如图4所示,分离值和位置估计误差越大则此处点云偏离真值的概率越大,固定解得到的点云质量优于浮动解,某个时刻卫星数目越多则得到的点云位置愈可靠,PDOP值越小表明此处点云质量愈佳。图中可以清晰地看出联合误差、位置估计精度、固定解/浮动解、卫星颗数和PDOP值随时间的动态变化情况。其中,联合误差分别在时段314 700~314 900 s、315 600~316 100 s、317 400~318 600 s、320 400~320 600 s出现较大的跳跃,而位置估计精度仅在时段316 000~316 100 s和317 400~318 600 s时出现较大偏差,固定解/浮动解状态与联合误差的跳跃情况基本保持一致,而卫星颗数的时序图又吻合了位置估计精度,PDOP值的时序图在时段316 000~316 100 s、317 400~318 600 s和319 300~319 500 s之间陡然增大,需要说明的是,PDOP值在这3个时段内由于过大已经溢出图示范围。经过以上分析发现,5种指示因子在时段316 000~316 100 s和317 400~318 600 s时表现出一致性,同时也表明这两个时段的点云质量可能表现不佳,因此,选择这2个时间段进行点云切片分析以验证该方法预测的准确性。通过QT软件进行切片查看,发现时段316 000~316 100 s即唐延南路与南三环交叉路段存在轻微分层,主要是该路段下穿G30连霍高速高架并在此处进行了掉头,但由于高架对信号遮挡有限且唐延南路较为宽阔(路面宽度将近60 m),因此,该路段分层并不严重。而时段317 400~318 600 s即科技路呈现出严重的分层,往返路段的扫描点云平面最大分层接近1 m、高程分层约为30 cm,其原因主要在于科技路两侧分布着密集的行道树和众多高楼,如林凯国际大厦、高科大厦、陕西电信、国家外汇管理局陕西分局、中国水电大厦、华奥大厦、新一代国际公寓等,给信号带来严重遮挡,且科技路路面宽度只有30 m仅为唐延南路的一半,严重的信号干扰造成点云数据分层。
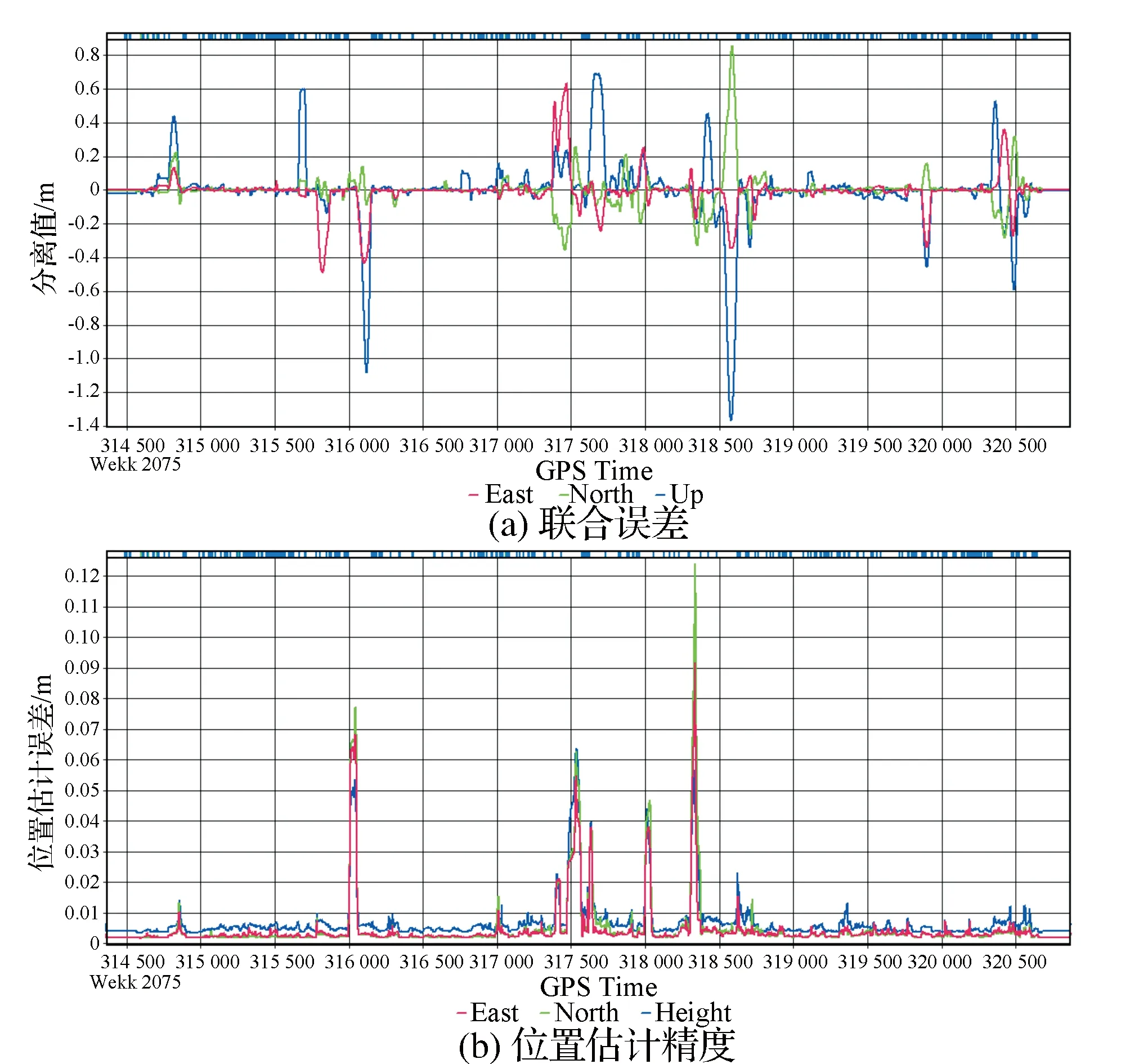


图4 2019-10-16-151914工程的5种定位指示因子时间序列图
综合以上分析可知,本文提出的方法在快速识别分层路段方面具有一定的准确性和可靠性,同时该方法对一些布设控制点困难道路(如快速路、高架桥等)的扫描数据进行快速分层路段定位提供了一种新的思路。
3 点云数据纠正与实例验证
3.1 点云数据纠正
本文的整体纠正步骤为:点云分层路段定位——基于CoRefine的不同点云条带间平差——数据精度评定。首先,根据第2节定位出的分层路段布设控制点;之后,在CoRefine平台上基于人工控制点进行往返路段条带间平差,对分层点云进行位置修正;最后,进行纠正结果的精度检验。纠正结果的精度检验采用独立验证进行评价[13]。为了更好地评估纠正的泛在误差,基于训练集不能用于验证集的原则,本文将训练数据(人工控制点)分成两个不相交的子集,通过测试点对和纠正后点云的拟合程度判断效果的优劣,评价指标包括最大误差、最小误差和中误差。
3.2 实例验证
为了得出合理的纠正方案,本文选取上述方法定位出的分层较大路段(科技路)进行重点分析,该路段总长度约2.4 km,且受复杂环境干扰严重,卫星信号中断频繁,在该路段上布设了38个点对,平均每60 m分布一个点对,如图5所示。

图5 科技路轨迹图
为了评估CoRefine的纠正效果,本文根据纠正点数量与分布的不同设置了三种试验方案,如图6所示,圆圈代表纠正点,方框代表验证点。首先,对比了纠正点间隔为120 m、纠正点和验证点各占50%时的纠正效果(见表1)。发现纠正后X,Y,Z方向上的最大误差均显著减小,X,Y和Z方向分别由纠正前的0.849 m、0.274 m和0.519 m减小到0.211 m、0.179 m和0.117 m,平面中误差和高程中误差分别由纠正前的0.298 m和0.165 m减小到0.086 m和0.07 m。

图6 试验方案示意图

表1 方案一纠正前纠正后点云精度对比 m
其次,对比了纠正点占比80%、验证点占比20%时的纠正效果(表2),此时纠正点的间隔大部分为60 m,只有在纠正点两端时间隔增大到120 m。从表2可以看出,在纠正点个数增加后,X,Y,Z方向上的最大误差存在不同程度的明显降低,平面中误差和高程中误差也由方案一的0.086和0.07分别降低到0.059和0.05。

表2 方案二纠正前纠正后点云精度对比 m
最后,在纠正点数量和方案一相同的基础上,方案三采用纠正点“V”型分布的方式进行,纠正效果见表3。可以看出,该方案的纠正效果和方案一基本相同,平面中误差和高程中误差维持在同等水平,但逊色于方案二的纠正效果,具体原因可能与纠正点数量和分布有关。进一步分析,当纠正点成对出现且分布于道路两侧时,纠正精度与纠正点数量成正比,而与纠正点是否呈“V”型分布无关。该结论能够给具体生产环节提供有价值的参考,如布设控制点数量越多越好,但考虑到人力成本和实际复杂环境(树木密集、非安全区域等)给某些位置控制点测量带来的困难,可以考虑将控制点按照“V”型或者对称型等不同分布方式加以解决。

表3 方案三纠正前纠正后点云精度对比 m
4 结 论
针对复杂城区环境下车载扫描方式获取点云数据质量分析过程中存在的问题,引入多种定位精度指示因子进行点云分层路段定位,此外,探讨不同的纠正点分布方案对点云数据纠正精度的影响,以期实现点云大数据质量增强。研究结果表明:
1)本文提出的多指标协同指示法能够快速地定位出点云分层路段,显著提高定位路段的准确性,避免单一指标引起的误标记,且能够初步将分层路段的误差大小预测出来。
2)分析纠正点间隔与分布形态对分层点云纠正效果的影响,为实际工作中如何高效地布设纠正点提供有价值的参考。
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
基层中医药(2020年7期)2020-09-11
建材发展导向(2019年11期)2019-08-24
中国生殖健康(2019年8期)2019-01-07
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28