高速隐身目标多传感器协同探测跟踪任务分解策略
2021-03-09 07:38王晶晶
探测与控制学报 2021年1期
孙 文,王 刚,王晶晶,付 强
(空军工程大学防空反导学院,陕西 西安 710051)
0 引言
高速隐身目标(HSST)具有速度快、机动性能好、RCS小等特点[1-2],在高速隐身目标探测跟踪任务规划过程中存在“看不清”、“跟不上”等问题[3],也将给任务的分解带来高度的紧迫性、复杂性和动态性。传统任务分解策略在时间性、层次性和复杂度等方面难以自适应地高效处理高速隐身机动特性带来的任务分解问题[4-6]。因此,亟需一种以时间为主体,具有更高的自适应性、层次性和可执行性的任务分解方法,以解决高速隐身目标多传感器探测跟踪任务分解问题。
防空反导作战任务分解中,文献[7—8]分别以分解粒度、任务均衡性为主要依据,对反导作战任务进行分解。文献[9]提出了一种分级任务分解思想,对协同空战任务进行分解。文献[10]主要从资源配置方面进行任务分解。目前,以时间为主体的任务分解策略研究相对不足,缺乏针对高速隐身目标的快速高效任务分解策略,本文借助于任务树的层次化表现形式,提出了以传感器和目标可视化关系为基础,基于“最长观测时间”、“起止时间”和“均匀时间分割”三者混合的柔性时间-任务树分解策略,对分解思想和步骤作了深入分析。通过案例分析,验证了分解策略的合理性和优越性。
1 高速隐身目标探测跟踪任务分解特点及准则
1.1 高速隐身目标探测跟踪任务分解特点
1) 时间窗口小。HSST飞行速度快,在传感器可视化范围内停留时间极短,并且要将任务分解为时间更短的元任务,使得传感器执行任务的时间窗口更加有限。
2) 难度层次高。HSST飞行轨迹具有不可预测性,速度快、隐身性能好。要完成对HSST的任务分解难度较大,首先分解依据缺乏确定性理论支撑,其次是分解后任务可执行性难以保证。
3) 交链系数大。HSST通常具有良好的机动性能,飞行轨迹难以预测,某一元任务的执行失败或者相邻元任务的间隔时间过大,都会影响任务分解的连贯性、紧凑性以及总任务的完备性。
1.2 任务分解基本准则
高速隐身目标探测跟踪任务分解需要考虑探测体系结构本身的静态信息、传感器的动态信息以及相关状态参数信息,同时还要考虑传感器之间的相互联系、相互制约的协调机制等。因此,对高速隐身目标探测跟踪任务分解提出了更高的准则要求,一般要遵循以下准则:
1) 完备性:高速隐身目标探测跟踪任务分解时,得到的元任务并集必须等于总任务;
2) 独立性:有助于各传感器独立的执行元任务,减少各传感器之间的协调以及通信;
3) 层次性:一个任务可以分解为多个子任务,子任务又可分解为多个下层子任务,层次化的任务分解有助于执行效率的提高;
4) 粒度性:元任务的长度要适中,元任务太长,会长期占用某个传感器资源,达不到优化的要求;元任务太短,达不到对目标估计和预测的要求;
5) 间隔性:由于HSST飞行速度快、机动性好,元任务之间的间隔要尽可能小甚至没有,才能保证后续元任务的成功率;
6) 可执行性:元任务必须符合传感器探测跟踪条件,如果任务分解之后,超出了传感器的执行能力,则分解失败。
2 柔性时间任务树分解思想
2.1 传感器与目标的可视化关系
传感器对目标的可视化时间段是指从目标进入到传感器的作用范围开始到离开传感器的作用范围为止的时间段。确立传感器与目标的可视化关系是进行任务分解的基础和前提。
假定,HSST在某一时间段内的飞行轨迹和传感器的基本性能已知,传感器对其可视化关系如图1所示。
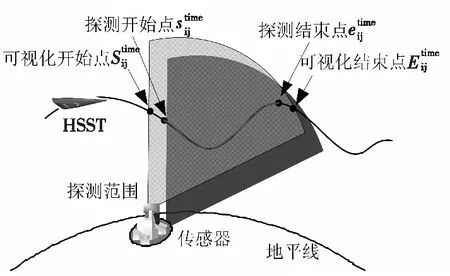
图1 传感器与高速隐身目标的可视化关系Fig.1 Visual relationship between sensor and HSST
2.2 混合时间任务树分解思想
2.2.1任务树分解
任务树是一种层次化的任务分解形式,有且仅有一个根节点,根节点为总目标,树中同层节点具有与/或关系,在这种与/或任务树(and-or-tree)中,若节点T有n条边通向节点ST1,…,STn,而且n条边逻辑“与”关系,则表示任务T的完成有赖于整个子任务组的全部完成,即T=ST1∧ST2∧…∧STn;若n条边逻辑“或”关系,则表示任务T的完成有赖于任务组某一子任务的完成,即T=ST1∨ST2∨…∨STn,若子任务仍不利于直接执行,则对它作进一步分解[11-12]。其中,多传感器探测跟踪的基本任务树模型如图2所示。
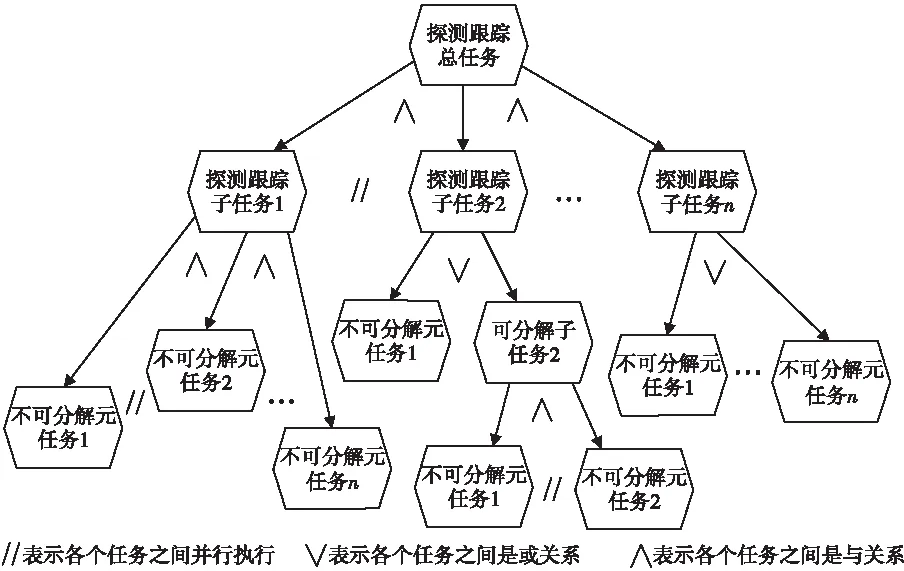
图2 高速隐身目标多传感器探测跟踪任务树Fig.2 HSST multi-sensors detection and tracking mission tree
任务分解后的各子任务之间具有以下三种关系:
1) 优先关系:子任务Ti必须先于子任务Tj执行;
2) 并行关系:子任务Ti可以与子任务Tj并发执行;
3) 互斥关系:子任务Ti与Tj不能同时执行,若有冲突则采用冲突消解策略解决。
2.2.2柔性时间-任务树分解思想
柔性时间-任务树是指按照“起止时间”、“最长观测时间”和“均匀分割时间”三种方式的混合方式进行总任务的分解,运用柔性重组的方式对任务的间隔性和粒度性进行处理,然后以任务树形式展现,各任务之间存在与或关系,可互斥也可并行执行。其中,柔性主要是指系统对于外部及内部产生的各种可预见或不可预见的变化,能够及时响应或动态调整的能力,在柔性时间-任务树分解策略中主要是指根据分解需求对均匀时间、最长和最短任务长度的柔性调整、动态处理。三种时间任务分解法的优缺点如下:
1) “起止时间”分解法:分解得到的任务中,每个任务的长度不同,同时每个任务也包含多种不同的传感器资源。缺点是容易出现某个传感器资源长期对同一个目标探测,降低了探测效果,当目标数量增多时,任务的规模将大幅度增加;
2) “最长观测时间”分解法:每个任务对应一个传感器来执行,传感器之间的切换率较低。缺点是某个传感器资源会长期被占用,降低了探测效果,增加了任务-资源冲突;
3) “均匀分割时间”分解法:分解得到的任务中,每个任务的长度相同,同时每个任务将包含多种不同的传感器资源。缺点是任务长度不易确定,长度太长容易导致某些任务没有合适的传感器资源来完成,太短容易造成传感器资源的频繁切换。
单一的分解方法很难达到多传感器探测跟踪任务分解的要求,使得分解的任务冲突性强,进而造成资源分配不均衡等问题。柔性时间-任务树的层次化思想:将高速隐身目标探测跟踪总任务作为任务树的第一层;将各个传感器对高速隐身目标的可视化任务作为任务树的第二层;将各传感器可视化任务按照“起止时间”分解后的子任务作为任务树的第三层;按照“最长观测时间”和“均匀分割时间”进行简化、筛选、整合拆分、柔性重组处理后的子任务作为任务树的第四层。
3 柔性时间任务树任务分解步骤
依据柔性时间-任务树分解思想,得到任务分解示意图如图3所示。
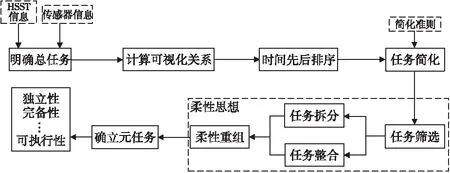
图3 柔性时间-任务树任务分解过程Fig.3 The flexible time-mission tree decomposition process
柔性时间-任务树任务分解法详细步骤:
步骤1 明确总任务。根据来袭目标情况,确立探测跟踪的总任务,并作为任务树的第一层。
步骤2 计算可视化关系。根据当前所有传感器与所有目标的可视化关系,确定不同传感器对目标的可视化时间段,将每个传感器的可视化任务作为任务树的第二层。
步骤3 时间排序。标出各个传感器对各个HSST的可视化时间段开始和结束时刻,按照从小到大的顺序排列,从而将每个传感器总的子任务分解为每个时间段上的子任务,作为任务树的第三层。
步骤4 简化。按照“起止时间”分解后,分别明确各传感器对同一目标的“最长观测时间”节点,对比各传感器的子任务长度,若某一时间段内,存在相同的任务由不同的传感器同时执行,即两个或者多个传感器之间有任务重叠,则按照如下准则任务简化。
1) 若传感器负载率较小,不同传感器可以同时承担此任务,则不予简化,提高任务的完成率;
2) 若某一传感器连续对同一目标的探测时间长度t≥Tlong,则探测效果会降低,因此在不影响其他传感器执行自身任务的前提下,任务分解时将其作为其他传感器的任务;
3) 比较传感器对此任务的完成率,将子任务作为完成率较高的传感器需分解的任务;
4) 若两个或多个传感器对同一任务的重叠探测窗口较小,则忽略,防止增加传感器之间的切换率和后续处理的复杂度。
步骤5 筛选。对任务需执行时间长度根据分解需求,按照“均匀时间分割”思想灵活确定,根据准则3),假定元任务的均匀时间为D,最长为Dmax,最短为Dmin,筛选出长度大于Dmax和小于Dmin的子任务,对于长度大于Dmax的子任务,执行步骤6;对长度小于Dmin的子任务,执行步骤7。
步骤6 拆分。继续拆分长度大于Dmax的子任务,保证最终分解后的元任务的长度在[Dmin,Dmax]内,假设此子任务长度为L,拆分为N个长度为Dz的元任务,具体方法如下:
(1)


3)i=++,执行2);
4)k=i,把相邻的k个子任务合并,对于达不到合并后任务长度的可视化时间段,执行步骤8。
步骤8 柔性重组。如果子任务单独存在且小于Dmin,左右相邻的两个子任务的长度都大于Dmin,则将此三个子任务整合,重新拆分成两个或者三个在[Dmin,Dmax]内的子任务;如果子任务单独存在且小于Dmin任务数量较多,则更新D、Dmin和Dmax,直至满足任务分解需求。柔性重组的目的是确保分解后元任务的完备性、连续性。将步骤4—步骤8处理后的得到的子任务作为任务树的第四层。
步骤9 确立元任务。将每个得到的每个符合各项要求的时间段任务,按照与每个传感器的关系进行进一步分解,得到的子任务即为元任务,将此作为任务树的第五层。
按照以上步骤分解得到的元任务具有以下优势:
1) 可执行性高。柔性时间-任务树分解得到的元任务在传感器可视化范围内,自适应的时间长度处理,使得任务的粒度性和间隔性更加合理,保证了任务的完备性,任务之间的冲突相对较小,执行性高。
2) 独立性好。对任务进行简化、筛选、整合拆分、柔性重组等一系列操作后,在时序关系上更加独立、有序,有助于各个传感器独立的执行元任务。
3) 层次性强。采用任务树的形式对任务进行分解,具有较强的层次感,有助于提高任务的分解效率,较好地表达不同任务在不同层次中的地位和实质。
4 案例分析
为了验证分解策略的有效性、合理性和可行性,假定,HSST的数量为4,传感器的数量为3,Dmax为20,Dmin为5,传感器与目标的可视化关系如图4所示。
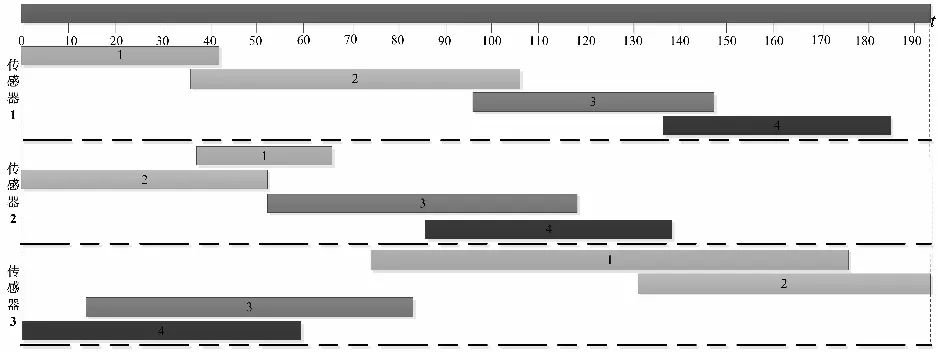
图4 传感器与目标的可视化关系Fig.4 Visual relationship between sensor and target
按照混合时间-任务树分解步骤,HSST的数量为4,明确总任务即对4个目标的探测跟踪任务,为任务树第一层;计算3个传感器与4个目标的可视化关系,为任务树第二层;对各个可视化关系进行起止时间的划分,得到第三层;由图可知,各传感器对目标1、2、3、4的可视化都存在重叠的部分,按照简化准则简化;基于“均匀时间分割”的思想,对任务进行整合、拆分、柔性重组得到任务树的第四层。分解结果如图5所示。
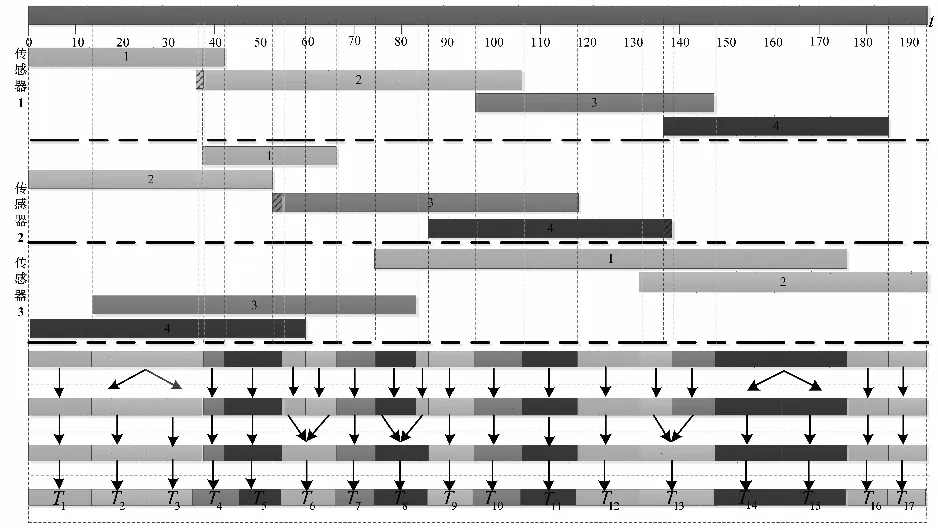
图5 多传感器探测跟踪任务分解结果Fig.5 Multi-sensors detection and tracking mission decomposition result
图5中分解得到的任务并不是元任务,而是同一时间段内,各个传感器元任务的集合(简称次元任务),元任务对应的是每个传感器的任务。
由此分解得到具有4个层次、17个次元任务的任务树,层次性明显,任务之间没有间隔,具备连续性、完备性的特点,同时,组成次元任务的各个元任务时间长度t∈[5,20],在规定的时间长度[Dmin,Dmax]内,任务具有合理的粒度性和较好的可执行性。利用柔性时间-任务树进行任务分解,有以下特点:
1) 传感器探测时间合理,减少了某个传感器长期被占用的几率,同时避免了传感器之间频繁切换;
2) 资源利用率高,任务分解后各个传感器任务分工明确,没有闲置的时间段;
3) 任务连续性、完备性好,各个任务之间没有出现因任务分解导致的中断和间隔。
因此,在高动态环境下,柔性时间-任务树分解方法有助于根据分解需求灵活自适应地调整,有利于对任务进行高效合理地分解。
5 结论
高速隐身目标多传感器探测跟踪任务分解对元任务的独立性、层次性和可执行性有较高的要求,本文针对高速隐身目标任务分解时间紧、难度大、交链度高等特点,以传感器和目标的可视化关系为前提和基础,结合“起止时间”、“最长观测时间”和“均匀分割时间”分解法和任务树层次化得思想,提出了柔性时间-任务树分解策略,该策略自适应程度高、灵活性强,有效保证了任务分解的完备性和可执行性等条件;并且通过案例分析,表明了分解策略的合理性、高效性。为未来HSST探测跟踪体系的建立奠定了技术基础。下一步将重点对分解后HSST多传感器探测跟踪元任务的分配问题进行研究。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
北京航空航天大学学报(2022年7期)2022-08-06
北京测绘(2022年6期)2022-08-01
师道·教研(2022年1期)2022-03-12
小学生学习指导(低年级)(2020年10期)2020-11-26
冰雪运动(2019年3期)2019-08-23
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
作文大王·低年级(2017年11期)2017-12-05
学苑创造·A版(2017年1期)2017-01-19