
改进的中心差分卡尔曼滤波水下被动目标跟踪
2021-03-09 07:18王明洲胡友峰
舰船科学技术 2021年1期
郑 艺,王明洲,胡友峰
(1.中国船舶集团有限公司 第 705 研究所,陕西 西安 710077;2.中国船舶集团有限公司 第705研究所昆明分部,云南 昆明 650118)
0 引 言
对水下目标进行识别和跟踪对于潜艇、鱼雷、水下无人潜航器等来说至关重要,是保证它们安全作业的重要环节。为了保证自身安全,不主动向外辐射能量的前提下,被动地对目标运动状态进行估计是很有必要的。而单站纯方位目标跟踪所需观测者少、隐蔽性强,应用场景广泛[1-2]。距离目标较近时由于方位抖动影响更大,使得滤波容易出现不稳定、甚至发散的情况。同时,这种情形下的一个难点是目标状态的潜在不完全可观测性,因此状态估计难度更大[3-4]。
单站纯方位目标跟踪是非线性问题,非线性滤波是解决这一问题常用的有效方法之一。扩展卡尔曼滤波(Extanded Kalman Filter,EKF)[5]是较早应用于目标跟踪的非线性滤波方法,但其仅为1阶近似,线性化误差较大,滤波的精度和稳定性较差[6]。采样型方法是实现非线性滤波的另一类方法,包括确定性采样和随机采样。以粒子滤波[7](Particle Filter,PF)为代表的随机性采样计算量过大,且可能会出现粒子退化或贫乏的问题,在工程应用中具有局限性[8]。
确定性采样方法包括无迹卡尔曼滤波(Unscented Kalman Filter,UKF)[9]、容积卡尔曼滤波[10](Cubature Kalman Filter,CKF)、中心差分卡尔曼滤波(Central Difference Kalman Filter,CDKF)[11-12]等。其中UKF 是应用最广泛的一种方法[13-14],可达至少 2 阶近似,但需要根据运动或观测模型的非线性来选择α,β,λ三个参数,难以找到参数的最优值。在UKF基础上的平方根无迹卡尔曼滤波(Square Root Unscented Kalman Filter,SR-UKF)也是一种用途广泛的滤波方法,具有较好的稳定性,是一种经典的平方根类的方法,在水下目标跟踪中有较好的效果[15-16]。因此本文也将SR-UKF作为一种对比方法加入到仿真中。
CDKF也是确定性采样方法中的一种,它选取采样点的方式与UKF不同。CDKF基于Sterling 多项式插值公式,对非线性函数按中心差分形式逼近,可达至少2阶近似。CDKF精度与UKF相当,且只需调整1 个参数h。因此 CDKF 在目标跟踪[17-18]、导航系统[19]等方面都有较好应用。但单站纯方位目标跟踪系统的可观测性差、观测噪声影响大,致使滤波器不稳定[3-4],尤其在目标距离近的情况下这种现象更常见。
本文目的是解决在近距离的纯方位观测情况中,单站纯方位目标跟踪中CDKF容易出现的滤波不稳定问题。因此提出了一种CDKF的改进方法,在采样点的协方差和量测协方差中采用QR分解计算协方差平方根,而在协方差平方根更新时使用更为稳定的奇异值分解(Singular Value Decomposition,SVD)进行计算,提高算法的稳定性和估计精度。
1 问题描述和滤波方法
1.1 单站纯方位目标跟踪
对于水下目标,在许多情况下,目标的运动是非机动的。因此,近似等速(Nearly Constant Velocity,NCV)模型[5,20]适用于水下被动目标跟踪场景。本文考虑二维平面运动模型,非机动目标和机动的观测站。
目标的运动状态可以表示为向量:

其中:xk,yk表示目标位置对应的坐标,表示目标的速度分量。对于NCV模型,目标匀速直线运动,系统的状态方程可表示为:

其中: Φ 为状态转移矩阵;w(k)为均值为0方差为Q的系统噪声:

系统的观测方程可表示如下:

其中:v(k)为均值为0方差为R的观测噪声。对于单站纯方位目标跟踪系统,观测函数为:

纯方位目标跟踪是典型的非线性滤波问题,式(1)和式(4)组成了系统状态空间模型。对于单站纯方位量测来说,观测站机动是系统完全可观测的必要条件而非充分条件,观测站的机动情况对滤波效果起着关键作用,但在近距离追击目标的情况下,观测站较大机动容易丢失目标,因此只能小机动或者不机动,因此系统可观测性受限。
1.2 中心差分卡尔曼滤波
假设系统状态变量是服从高斯分布的,且均值和协方差已知。CDKF的核心思想是利用斯特林多项式插值公式,将非线性方程按中心差分形式展开,无需计算函数的雅可比矩阵。非线性函数f(x)在x=x¯处展开的2阶斯特林多项式插值公式为:

其中:h为中心差分半步长,其取值可决定采样点的分布区间,适合于高斯分布的h最佳取值为为均值为0,与x具有相同协方差的随机变量。式(6)可以看作是用中心差分运算代替泰勒级数展开中的求导运算,用1阶和2阶中心差分算子来代替1阶和2阶导数。
文献[11]中的中心差分滤波器和文献[12]中的差分滤波器都是基于斯特林多项式插值公式,本质上是相同的,也就是CDKF。CDKF通过确定性加权的采样点(Sigma点)来近似状态变量的分布函数,并通过采样点的非线性变换,估计非线性变换后状态变量的均值和协方差。L维的状态向量需要构造个Sigma采样点,Sigma点与真实的状态向量有着相同的均值、方差和高阶中心距。常规CDKF用于目标跟踪的具体步骤如下:
步骤1k=0时,初始化状态向量和协方差
步骤2采样点和对应权值

步骤3时间更新
步骤4采样点协方差矩阵
步骤5采样点点集更新

步骤6量测及其协方差更新
步骤7卡尔曼增益和目标状态更新

步骤8状态协方差更新

在k=1,2···K时,循环步骤2到步骤8,即可完成CDKF滤波。
2 本文所提方法
CDKF方法是一种应用广泛的确定性采样的非线性滤波方法,但在单站纯方位目标跟踪中,容易出现滤波不稳定甚至发散的情形。为了解决这一问题,本文提出一种奇异值分解平方根中心差分卡尔曼滤波(Singular Value Decomposition Square Root Central Difference Kalman Filter,SVDSR-CDKF)。不同于常规的平方根方法,它在计算采样点的协方差和量测协方差中采用QR分解,而在计算状态协方差更新阶段使用奇异值分解。
2.1 协方差的QR分解
与常规的平方根方法相同,本方法同样对采样点协方差和量测协方差进行QR分解。QR分解可表示为A=QR,它将矩阵A分解为一个正规正交矩阵Q和一个上三角矩阵R的乘积,则容易推导出:

用采样点协方差矩阵QR分解得到的代替,则

其中,QR{}表示QR分解,返回结果为分解后得到的上三角矩阵。用量测协方差矩阵的QR分解代替,则

2.2 奇异值分解协方差平方根更新
常规的平方根方法采用Cholesky分解计算状态协方差的平方根。Cholesky分解要求被分解的矩阵是正定的,而对于纯方位单站目标跟踪,尤其是近距离时,方位噪声扰动大和观测站机动的影响,常规的平方根CDKF在状态协方差平方根更新有时可能出现非正定的情形,导致滤波不能正常进行。奇异值分解不受被分解矩阵正定性的限制,相比于Cholesky分解更加稳定和易于实现。因此本文提出在CDKF的状态协方差更新阶段,用奇异值分解的方法构造状态协方差的平方根。
若A∈Rm×n(m≥n),则矩阵A的奇异值分解为:

其 中 ,U∈Rm×m,T∈Rn×n, Λ ∈Rm×n,S=diag(s1,s2,······sr),s1≥ s2≥ ······≥ sr≥ 0是A的奇异值。
单站纯方位目标跟踪系统,状态方程的协方差矩阵为:

P是一个对称矩阵,对其进行奇异值分解后可得U=V,故可得:


然后,对更新后的状态协方差进行奇异值分解:

其中,U,S(d),V分别对应式(27)中的U,Λ,T。最后令协方差矩阵平方根为:

用式(30)~式(32)代替CDKF中的步骤8,可以得到一种基于奇异值分解的状态协方差平方根更新方式。由于奇异值非负,因此总是有意义的。即使式(30)的协方差是非正定的,也可以完成奇异值分解,并计算得到Sk。
2.3 奇异值分解平方根CDKF流程
本文所提出的奇异值分解平方根的中心差分卡尔曼滤波方法建立在1.2节所述的CDKF方法的框架之上,具体步骤如下:
步骤1k=0时,初始化状态向量和协方差分解阵

其中,chol代表Cholesky分解。
步骤2采样点及其权值

步骤3时间更新

步骤4采样点协方差的QR分解

步骤5采样点集更新

步骤6量测更新
步骤7量测协方差阵QR分解

步骤8卡尔曼增益和目标状态更新

3 仿真实验
为了验证本文所提方法在单站纯方位目标跟踪中的有效性和优势,在3种常见的近距离跟踪轨迹情形下进行仿真。初始状态观测站获取的距离误差5%,速度误差5%,初航向误差的均方差为3°。方位估计周期为100 ms,系统的观测噪声协方差R=3,过程噪声强度。分别用CDKF、常见的平方根类方法SRUKF以及本文所提的奇异值分解平方根CDKF方法进行100次蒙特卡罗实验。
用均方根误差(RMSE)来衡量估计偏差。定义均方根误差如下:

情形1:直线拦截目标轨迹。
目标以50 kn速度向东做匀速直线运动。观测站初始位置坐标为(480,128),以50 kn的速度向南偏西60°方向运动,观测时间10 s。这种情形下的运动态势如图1所示。图2为100次蒙特卡罗实验统计的3种方法的均方根误差比较。
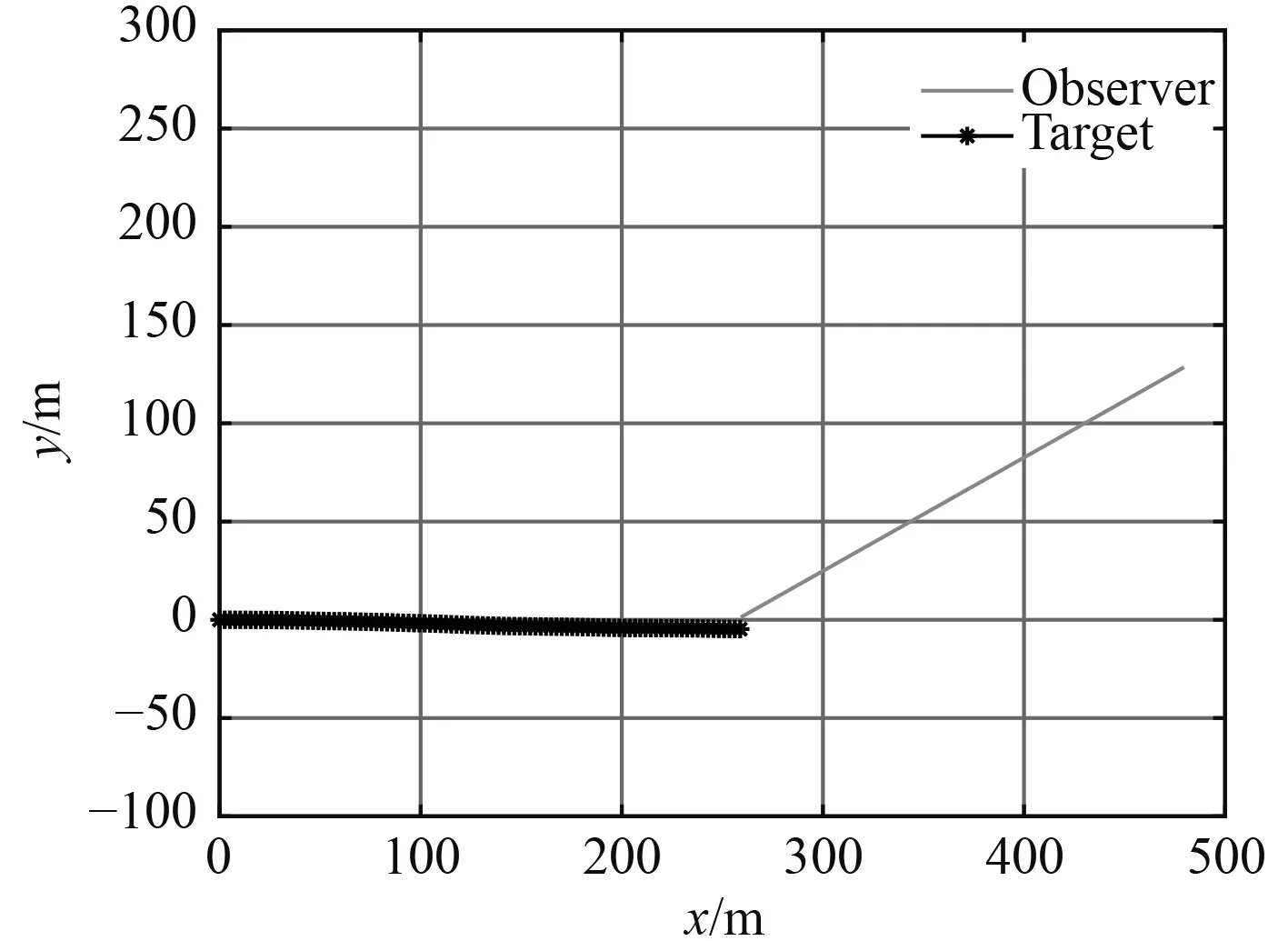
图1 情形 1 运动态势图Fig.1 Movement situation map of case 1
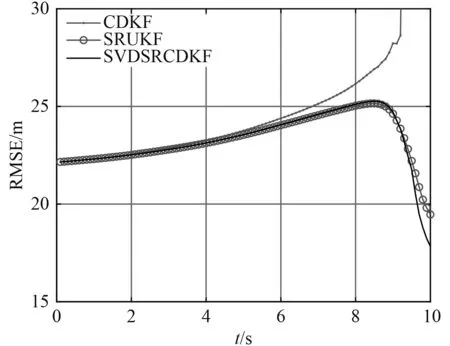
图2 情形 1 均方根误差Fig.2 Root mean square error of case 1
为了验证不同观测噪声协方差下所提方法的有效性,在观测噪声协方差为1°~5°的条件下分别进行100次蒙特卡洛实验,统计3种方法的平均RMSE,结果如表1所示。

表1 不同观测噪声协方差下的各方法比较(情形1)Tab.1 Comparison of methods in different observation noise covariance (Case 1)
情形2:观察者近距离提前角追踪目标。
目标以50 kn速度向东匀速直线运动,观测站在目标北偏东60°方向距目标250 m处,以50 kn的速度、7°的提前角追踪目标,观测时长为7 s。图3展示了这一情形下的目标和观测站的运动态势。统计100次蒙特卡罗实验结果,3种方法的均方根误差比较如图4所示。
在观测噪声协方差为1°~5°的条件下,统计100次实验中3种方法的平均RMSE,如表2所示。

图3 情形 2 运动态势图Fig.3 Movement situation map of case 3

图4 情形 2 均方根误差Fig.4 Root mean square error of case 2
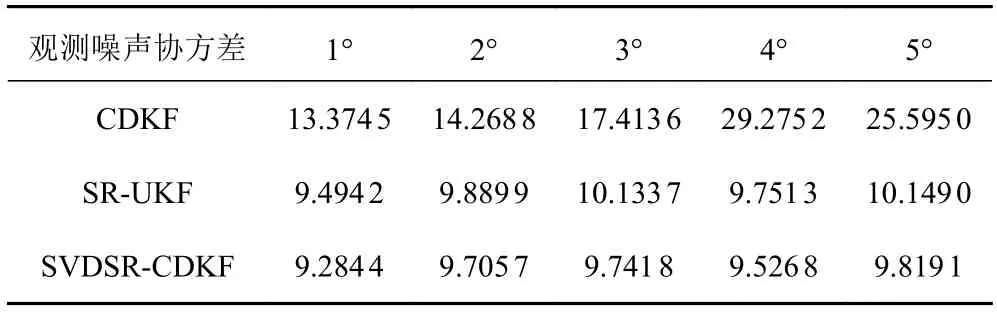
表2 不同观测噪声协方差下的各方法比较(情形2)Tab.2 Comparison of methods in different observation noise covariance (case 2)
情形3:观测站迎面拦截态势。
目标以50 kn速度向东做匀速直线运动。观测站初始位置坐标为(454,145),以50 kn的速度向南偏西45°方向匀速直线运动。8 s后观测站转向正西方向以50 kn速度向目标匀速直线运动,观测时长共计14 s。情形3的运动态势如图5所示。3种方法100次蒙特卡罗实验后的均方根误差如图6所示。3种方法观测噪声协方差为1°~5°时,100次实验的平均RMSE如表3所示。

图5 情形 3 运动态势图Fig.5 Movement situation map of case 3

图6 情形 3 均方根误差Fig.6 Root mean square error of case 3

表3 不同观测噪声协方差下的各方法比较(情形3)Tab.3 Comparison of methods in different observation noise covariance (case 3)
综合3种情形下各滤波器的仿真结果,对于同一目标不同的跟踪轨迹得到的跟踪误差是不同的,这说明对于单站纯方位目标跟踪而言,观测站的机动直接影响估计效果。但实际中肩负其他作业任务的观测站不一定可以执行最优观测轨迹,这对滤波方法的性能提出了更高要求。而3种不同的观测轨迹中,对比3种滤波方法的误差可以得到相似的结论:常规的CDKF方法由于容易出现发散,导致平均误差较大,各种情形下其均方根误差都是最大的。SR-UKF方法作为一种经典的平方根类的方法,用于水下纯方位目标跟踪具有较好效果,各种情形下误差均低于CDKF方法。本文所提的SVDSR-CDKF方法解决了CDKF在几种情形中容易发散的问题,且滤波误差最低。在3种仿真情形下和各种不同的观测噪声协方差下,本文提出的SVDSR-CDKF方法均具有最低的均方根误差。
4 结 语
针对单站纯方位目标分析中有时容易出现的滤波器不稳定、易发散的情况,本文提出一种SVDSR-CDKF方法。该方法以CDKF方法为基础,在计算采样点协方差和量测协方差时采用QR分解计算协方差平方根,而在状态协方差更新阶段使用奇异值分解。通过2种不同的方式计算协方差的平方根代替协方差矩阵参与运算,增强算法的稳定性。为验证所提方法效果,进行了3组不同情形的仿真实验,比较常规CDKF方法、经典的平方根类方法SR-UKF方法和本文所提的SVDSR-CDKF方法,并在每种情形下调整不同的观测噪声进行各方法的均方根误差比较。结果表明,本文所提方法避免了常规CDKF容易发散的情形,且具有比常规CDKF和SR-UKF更低的滤波误差。综合各项仿真结果表明,本文提出的SRSVDCDKF方法是一种精度高、稳定性好的纯方位目标跟踪方法。对于本文的未尽之处,未来考虑在以下方向进行研究:一是探索该方法对于跟踪机动目标的效果;二是考虑该方法对于三维模型中目标的跟踪。
猜你喜欢
中学生数理化·七年级数学人教版(2020年3期)2020-08-10
初中生世界·八年级(2020年12期)2020-03-10
数学学习与研究(2018年3期)2018-03-14
考试周刊(2016年54期)2016-07-18
小学生时代·大嘴英语(2015年7期)2015-11-23
现代电子技术(2015年10期)2015-05-29
中学生数理化·七年级数学人教版(2014年2期)2014-06-20
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16
中学生数理化·八年级数学北师大版(2008年7期)2008-10-15
