
10 km以上跨海高程传递中测角精度的影响因素
2021-03-08 07:12胡海驹张惠军周建营陈国恒
海洋技术学报 2021年6期
胡海驹,张惠军,周建营,陈国恒
(广东省国土资源测绘院,广东 广州 510500)
跨海高程传递在海洋工程、跨海桥梁工程建设和测绘地理信息服务等领域已得到广泛的应用。工程应用上常用的跨海高程传递主要有基于高程异常的全球导航卫星系统(Global Navigation Satellite System,GNSS)测量法[1]和精密三角高程法[2]。针对10 km以上的长距离跨海区域特点,GNSS测量法要求跨海区域地形特征平缓,点位布设须呈线性均匀分布,而且陆地水准的连测成本也较大。相对而言,精密三角高程法选点位置较为灵活,只需通过GNSS测量获得跨海点位距离,以及测得两点间的天顶距或垂直角(垂直角与天顶距相加等于90°),即可求取两岸跨海点间的高差值。该方法在工程案例上获得了验证,如赵尘衍等[3]采用了改进的精密三角高程法,在舟山群岛实现6 km以上的跨海高程传递,精度达到三等水准要求;XU Y M等[4]、张惠军等[5]、麦建开等[6]在台山川岛实现了10 km以上长距跨海高程传递,且精度达到了二等水准要求。根据精密三角高程测量原理,其主要的误差源是测距和测角,测距可采用GNSS测量与数据解算得到,精度能达到毫米级。而相对于测距,测角误差是最主要的误差来源,不少学者已分析论证[7-11]。与此同时,长距离跨海高程传递中的精密三角高程测量无可避免地会受到仪器照准和近地层大气折光的影响,而且由于海面上温度、湿度、风力、水汽及潮汐变化等因素,使测角误差更为复杂,有时并不是界限分明的[12]。因此,本文通过精密三角高程法在长约15 km的试验区进行跨海高程传递应用研究,分别试从观测照准和外界环境影响等因素,量化分析测角误差对高程传递带来的影响,为10 km以上长距离跨海高程传递的工程应用提供参考。
1 试验区概况
试验区选择了位于广东省江门台山市川岛附近的海湾作为模拟陆岛跨海高程传递的试验场地,并在两岸的山包上分别布设两座观测墩,最大程度保证了仪器和观测目标的稳定性,点位布设构成了大地四边形,增加了检测条件。两跨海点间距离约15 km,海湾部分通过精密三角高程法进行高程传递,陆地部分则采用高等级的水准测量,目的是通过两种方法的高差对比来检测测角误差所带来的影响。为保证跨海视线通视和减少大气垂直折光的影响,天线墩尽量往高处埋设,其中B001、B002海拔约18 m,B003、B004海拔约68 m。埋设示意如图1所示。
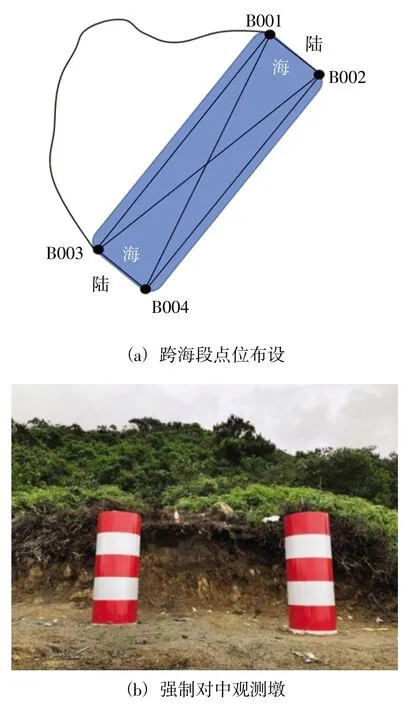
图1 试验场点位埋设示意图
2 应用实例
本次研究在试验区域完成了观测,观测流程和高差公式计算采用改进的精密三角高程方法,基本原理是通过同步对向观测,利用短边和长边的三角高程高差进行传算,从而得到两岸的高差[5-6]。按照观测流程,当B001-B003设站时,B001、B003分别先后照准近岸B002、B004的棱镜和测灯进行短边传算,然后B001、B003分别同步对向照准远岸的B004、B002的测灯进行长边传算,就能通过公式计算获得B002-B004的高差,即为长边h24的高差值;同理,当B002-B004设站时,获得的是B001-B003的高差,即为长边h13的高差值。同样的,依次观测可获得另外两条长边h14和h23的高差值。观测过程中采用高精度的测量机器人(测角精度0.5″),配合测灯与棱镜组合装置和自主开发的观测记录软件,保证了数据观测的稳定性和可靠性。根据高差计算公式,将每组的观测值进行统计,参照规范[13]综合取舍后得到每时段的高差值,并筛选出在限差内的合格测段。限于篇幅,本文主要以测段h13和h14为例进行试验分析,观测统计见表1。

表1 合格测段高差统计表
经过各项公式计算,得到了满足规范要求的精密三角高程高差值,但不难发现,各合格测段在每个时段获得的双向高差值各有差异,其中h13各时段最大互差0.29 m,h14各时段最大互差0.11 m。由于距离长达约15 km,且横跨3个月的分时段观测,在海面上的气候条件等不确定性增加了测量人员的观测难度,引起了观测误差的增加。本文使用改进的精密三角高程方法,相对于15 km的长边观测,短边距离仅约为3 m,其天顶距观测误差基本可以忽略。因此,长边天顶距的观测是本次测角误差的主要来源。
3 研究分析
3.1 观测照准的影响
对于长距离的跨海天顶距观测,由于在强光环境下全站仪望远镜的照准受限,通常需要利用夜间时段架设测灯进行观测,但可能带来照准精度不高和照准不稳定的问题,本次试验将从这两方面来分析照准观测所带来的影响。
3.1.1 测量仪器的照准精度
首先利用全站仪望远镜进行瞄准,比较测量人员观测照准视差带来的影响,分析仪器望远镜的照准精度。测灯架设情况共设置3种,见表2。从对岸利用全站仪望远镜照准及其局部放大的视觉如图2所示。

表2 测灯架设情况

图2 不同架设情况的全站仪照准视觉及放大图
由图2可知,不同的测灯架设情况,在同一全站仪的望远镜视觉效果各不相同。第1种方式是本次研究大多数条件下的照准视觉状态,可见十字丝将灯源一分为四。第2种方式由于天气状况不好,导致能见度低,而且在实际观测过程中灯光闪烁和不稳定,十字丝瞄准灯源困难。第3种方式则是利用两个测灯在不同距离常亮状态下的视觉效果。可以看出,当两个测灯间隔0.55 m时,两个光源重叠在一起,除了亮度略有增加外,人眼看过去与单个光源的视觉效果基本一致,没法有效分辨两个光源的中心位置。
由于仪器望远镜的照准清晰度暂时无法改善,因此需要在能见度良好的情况下,通过训练测量人员的光源照准能力,来提高天顶距观测的精度和稳定性。为此,在B002处利用第3种架设测灯情况,两个测灯交替常亮,对岸测量人员在B003点依次交替对两个测灯进行天顶距的单向观测,各观测8组,每组观测12个测回,因为是短时间内连续交替观测,此时认为该状态下受大气折光的影响是相同的,可相互抵消。观测时每个测回的竖盘指标差、各测回指标差较差和天顶距每组各测回间较差等指标均按规范要求执行。然后计算获得两个测灯高差值,与实际架设的高差值做比较。测灯架设情况和天顶距观测分布如图3和图4所示。


图4 照准训练的天顶距分布图
由图3和图4可知,双测灯通过交替常亮的状态下,测量人员能够有效照准光源的中心,两组天顶距的分布趋势均匀一致。其中测灯1平均天顶距为90.248 6°,测灯2平均天顶距为90.246 5°,两测灯与全站仪的距离可大致等于B002-B003的距离值,即14.877 km。根据三角函数公式计算得到测灯1至全站仪的高差为-64.544 m,测灯2至全站仪的高差为-64.006 m,即两测灯的高差互差为0.537 m,而实际两测灯的高差值为0.550 m,二者的差值为0.013 m,符合规范测段高差不符值限差(k=14.877 km)。因此,经照准训练的测量人员可满足该段约15 km的天顶距的观测。同时可知,两测灯天顶距的平均差值为7.45″,则每秒所造成的高差偏差值为0.07 m。证明海面环境决定了能见度状况,又因为受限于仪器望远镜在长距离观测的照准清晰度,使在瞄准间隔0.55 m左右的两个同时常亮测灯时,测量人员没法分辨出两个光源的中心位置。但测量人员经过观测训练,在能见度良好的情况下,单测灯常亮测得的高差值与实际值符合在限差内,证明测量人员的照准误差主要来源于因跨海区域的天气环境所引起的光源变化,且每秒天顶距的偏差值会引起7 cm的高差偏差。
3.1.2 各时段天顶距的照准稳定性
为了直观反映不同时段各天顶距的稳定性,选取了测段h13长边天顶距的观测数据分布情况作分析,见图5。同时列出每个时段的环境状况,其中时段1、2、3通过天气网站历史记录查询获得,但气压数据缺失,而从时段5起,温度、湿度和气压均采用仪器实测获得,并取其平均值,风向、风速则借助天气网站查询实时记录,见表3。
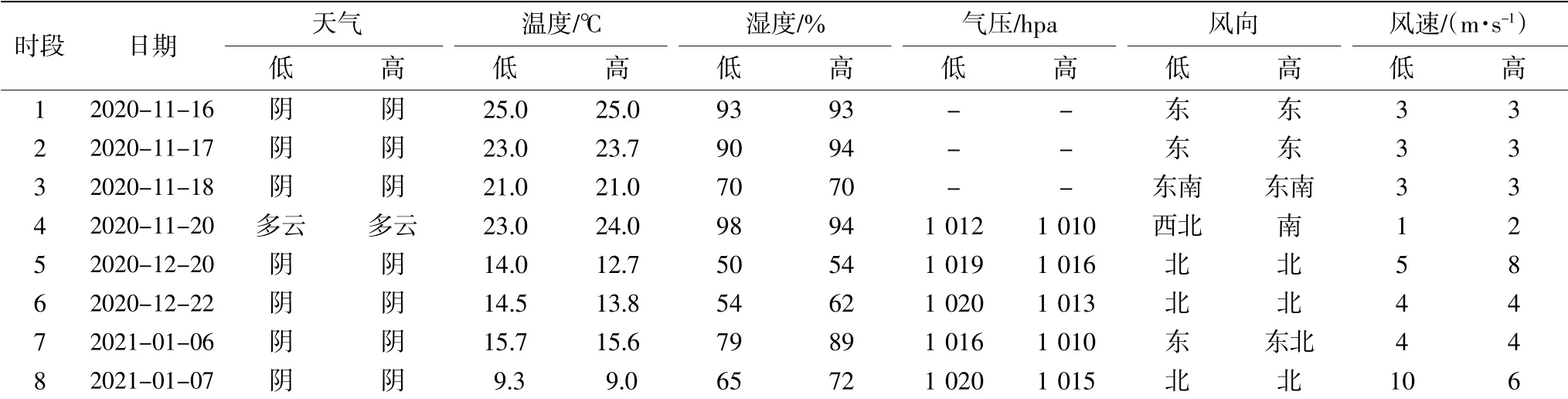
表3 h13环境状况表

图5 h13天顶距分布图

由图5各测段的天顶距分布结合表3的环境状况来看,不同的时段随着环境的变化,天顶距的照准分布各有差异,且出现了分群现象。从同步对向观测天顶距互差的情况看,测段h13在环境状况较稳定的时段1、2、3、4、6、7分布相对一致,对应的双向高差值在49.934~50.008 m之间,验证了同步对向观测可削弱观测环境引起的照准差异,是提高三角高程精度的有效途径[14]。时段5由于风速较大,且海拔高和海拔低的两处位置风速有所差异,高处位置风速达到8 m/s,导致天顶距互差较其他时段偏大,对应的双向高差值为50.139 m。时段8有强冷空气入侵,温度下降,风速很大,低处位置达到10 m/s,导致天顶距互差较其他时段偏小,对应的双向高差值为49.846 m。因此,两岸观测站点不对称的较大风速和不稳定的温度变化,会影响观测照准,且通过同步对向观测来削弱环境影响的效果不明显。本文再进一步分析测段h13的天顶距观测精度情况,如图6所示。
由图6可知,对于海拔高差约50 m的同步对向观测,无论是海拔高或低,照准精度相当,且平均照准中误差均为1.49″。而各时段的平均最大互差值在7.35~7.54″,按照1″=7 cm来计算,测量人员照准观测造成的高差偏差值可能在51.45~52.78 cm之间,这与上述照准试验的第3种测灯架设情况中的视觉效果距离比较相符,也证明了即使测量人员经过训练后保证了照准稳定性,但由于全站仪望远镜照准精度有限和受到海面上复杂环境的影响,导致每个时段所得到的高差值也不尽相同。

图6 h13天顶距照准中误差和最大互差值统计图
3.2 外界环境的影响
潮汐、两岸的天气环境等不同因素所引起的近地层大气折光变化是一定程度上影响着测角变化的重要因素,这种界限不分明的状态使测角误差研究更为复杂,本次试验尝试从这些因素来分析外界环境所带来的影响。
3.2.1 潮汐的变化
首先从潮汐变化的趋势,选取了测段h13大于80个测回的时段(即时段5、6、7、8),结合天顶距的分布特点进行分析。如图7所示。
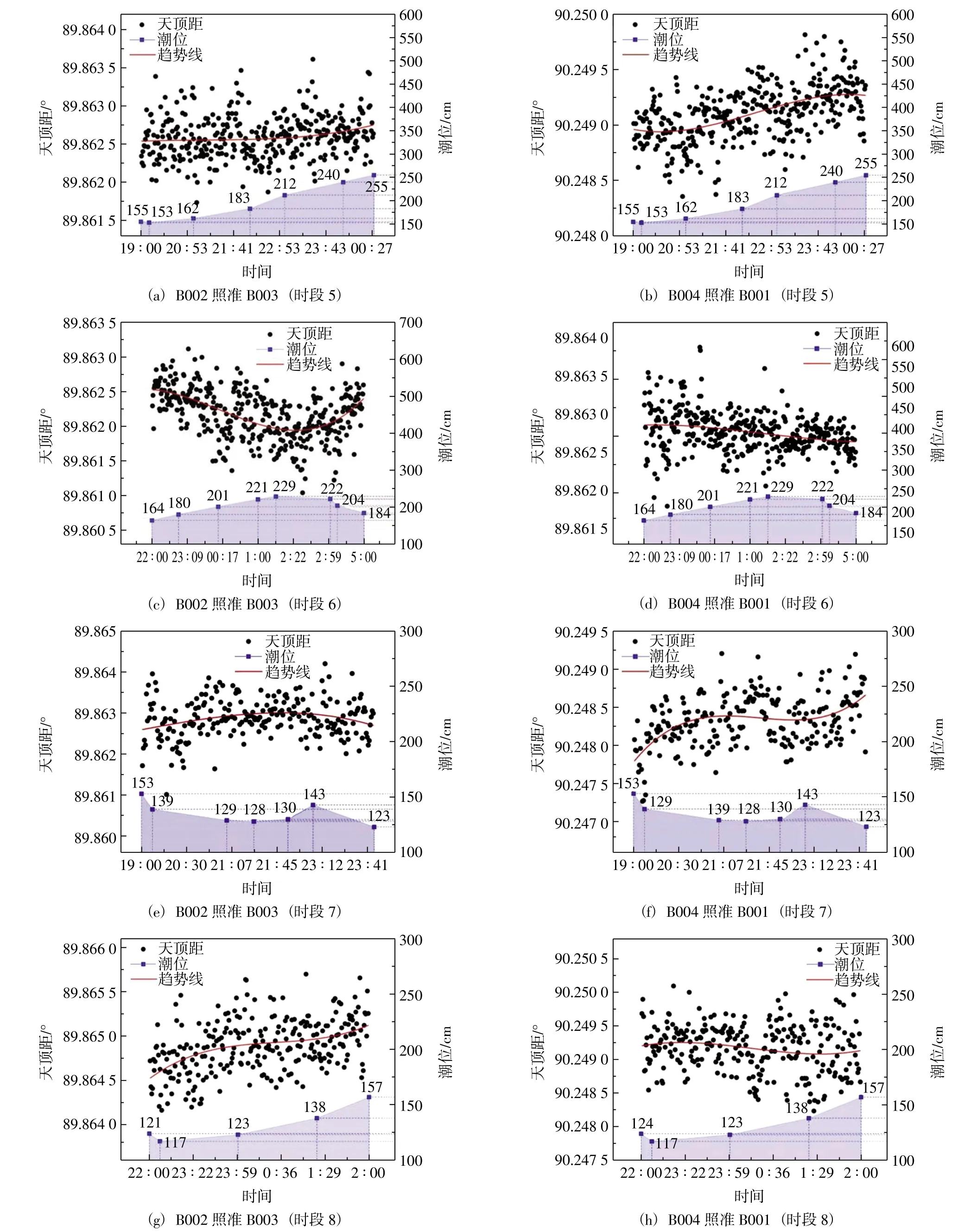
图7 h13潮汐变化与天顶距分布图
图7显示的是测段h13天顶距分布和潮位关系随时间的变化趋势情况,并从图上添加一条天顶距变化的趋势线。潮位信息通过潮汐潮流信息服务平台(http://global-tide.nmdis.org.cn/)查询试验区域附近的上川岛(三洲湾)港口获得,并记录了每个整点、最高潮和最低潮的潮位值。从图7可知,测段h13的时段5潮位从155 cm上升至255 cm,是一个涨潮过程(图7(a)、图7(b))。当B002照准B003,天顶距呈逐渐增大的趋势,但变化很小,基本趋于平稳(图7(a));当B004照准B001,天顶距同样呈逐渐增大的趋势(图7(b))。时段6潮位从164 cm上升至229 cm,再下降至184 cm,经历了涨潮和落潮的过程(图7(c)、图7(d))。当B002照准B003,在涨潮时天顶距的变化逐渐减小,而到落潮时天顶距的变化又逐渐增大(图7(c));当B004照准B001,在涨潮时天顶距的分布相对离散,在落潮时天顶距的分布相对集中,但总体天顶距的变化呈逐渐减小的趋势(图7(d))。时段7潮位从153 cm下降至128 cm,然后上升至143 cm,再下降至123 cm,经历了2次落潮和1次涨潮过程,潮位变化相对平稳(图7(e)、图7(f))。当B002照准B003,天顶距变化呈逐渐增大再到减小的趋势,但并不明显(图7(e));当B004照准B001,天顶距呈逐渐增大的趋势(图7(f))。时段8潮位从124 cm上升至157 cm,是一个涨潮过程,潮位变化相对平稳(图7(g)、图7(h))。当B002照准B003时,天顶距呈逐渐增大的趋势(图7(g));当B004照准B001时,天顶距呈逐渐减小的趋势,但并不明显(图7(h))。由此可见,潮汐变化引起的大地折光一定程度上影响着天顶距变化的趋势。
3.2.2 天气和大气折光差
本次试验得到了两套高差结果,一个是通过陆地水准测量得到精密高差值,另一个是通过三角高程测量得到的三角高差值。当不考虑垂线偏差和其他观测误差的影响,针对天气环境引起的大气折光变化问题,可利用已知精密高差来求取折光系数K值进行分析[15]。公式如下:

式中,h12为单向三角高差值;为精密水准高差值;D为平距;R为地球平均曲率半径。
试验中通过严格的同步对向观测,可得到两个大气折光系数K1和K2值的变化情况,并进行分析。这里以合格测段h13和h14为例,选择7个包含不同双向高差值、不同时间段和不同天气环境的时段进行分析,见表4。根据公式(1)分别获得了7种情况的大气折光系数K1和K2值,时序分布如图8至图14所示,数值统计情况见表5。
需要说明的是,利用公式(1)所得到的大气折光系数K值仅反映不同情况下的变化情况,由于视线过长和测角误差的影响,K值精度可能不够高,而又因为视线距离和测角精度一致,此时可认为求得的K值精度相等。上述测段h13的K1值为B002照准B003的大气折光系数,K2值为B004照准B001的大气折光系数。测段h14的K1值为B002照准B004的大气折光系数,K2值为B003照准B001的大气折光系数。结合表4和表5,由图8可知,情况1中K1和K2值分布有交叉重叠,且整体在同一个区间范围,平均大气折光差ΔK为0.001,对应的双向高差值与水准高差值相差0.014 m。该时段气温适中(23~24℃),湿度很大(94%~98%)且吹微风(1~2 m/s)的天气环境,同步对向观测后的ΔK接近为0,总体上较有效削弱了大气折光的影响;由图9可知,情况2中K1和K2值分布明显不一致,且整体上均不在同一个区间范围,平均大气折光差ΔK为0.021,对应的双向高差值与水准高差值相差0.179 m。该时段天气特点为风速大(5~8 m/s)和湿度相对较低(50%~54%),大风环境可能是导致ΔK大的原因;由图10可知,情况3中K1和K2值整体波动较大,可能原因是此时段观测横跨时间较大,且多数在下半夜,而K1和K2值在约前50个测回和约后30个测回略有分离,其余重叠度较好,平均大气折光差ΔK为0.003,对应的双向高差值与水准高差值相差0.026 m。该时段的天气特点为湿度相对较低(54%~62%),相较于情况2,两岸风速相等且较小(4 m/s);由图11可知,情况4中K1和K2值整体略有分离,K1整体偏大于K2,平均大气折光差ΔK为0.005,与情况1的ΔK均很小,对应的双向高差值与水准高差值相差0.037 m。该时段的天气环境较好,适宜同步对向观测;由图12可知,情况5与情况2类似,中K1和K2值存在明显的分离现象,平均大气折光差ΔK为0.012,对应的双向高差值与水准高差值相差0.114 m。该时段的天气由于受冷空气入侵,温度降至10℃以下,且风速很大(6~10 m/s),可能由此受到一定的影响;由图13可知,情况6观测时间发生在下半夜(2:50—6:00),K1和K2值波动较大,整体上重叠,平均大气折光差ΔK为0.003,与情况1、4的ΔK均很小,对应双向高差值与水准高差值相差0.032 m。该时段的天气特点为湿度大(84%~96%),风速大(5~8 m/s),与情况2、5相比,同样在风速较大的条件下,情况6得到的双向高差值却接近于水准高差值;由图14可知,情况7与情况6相似,观测时间发生在下半夜(2:23—6:01),K1和K2值波动较大,重叠度不高,平均大气折光差ΔK为0.007,对应双向高差值与水准高差值相差0.064 m。该时段天气特点为湿度大(80%~95%),风速大(5~7 m/s)。
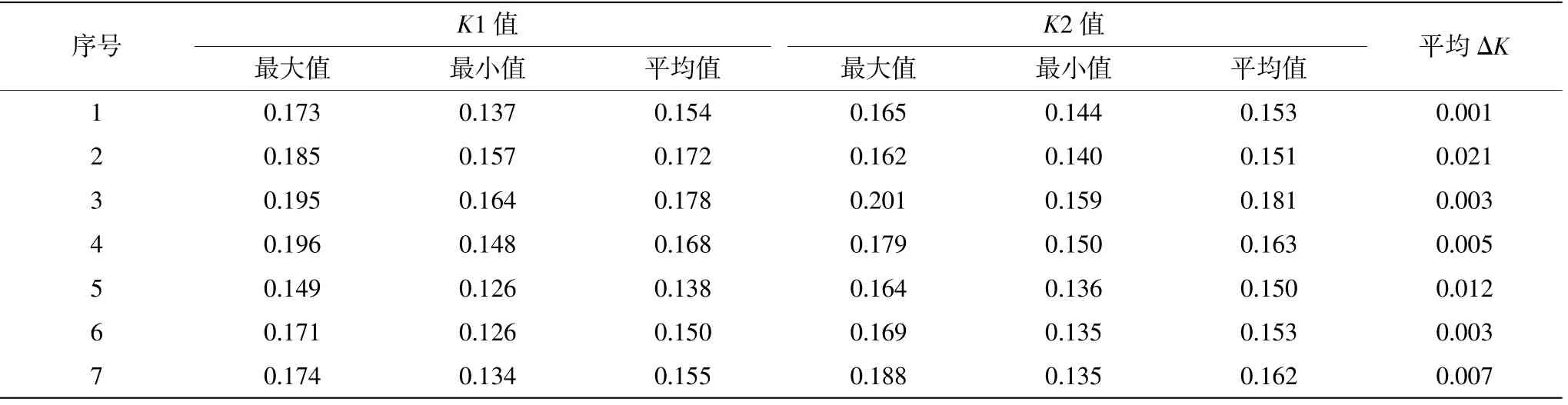
表5 K值数值统计表

图8 情况1大气折光系数变化图

图9 情况2大气折光系数变化图

图10 情况3大气折光系数变化图
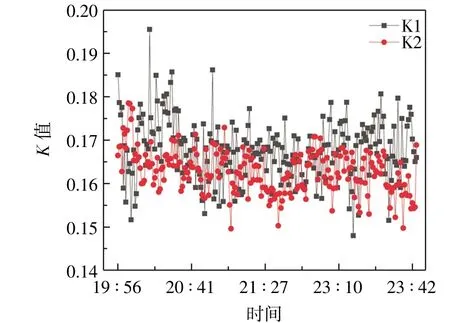
图11 情况4大气折光系数变化图

图12 情况5大气折光系数变化图

图13 情况6大气折光系数变化图

图14 情况7大气折光系数变化图

表4 K值计算测段情况统计表
综上所述,7种情况的平均大气折光差ΔK从小到大的排序为1<3=6<4<7<5<2,对应的双向三角高差与水准高差的较差值从小到大的排序为1<3<6<4<7<5<2。不难发现,当ΔK较大的情况2、5和7,采用三角高程同步对向观测得到的双向高差与水准高差的较差值偏大,尤其是情况2和5,较差值达到了0.179 m和0.114 m。除了情况6外,ΔK较大的情况2、5和7的天气共有特点均为大风环境,风速达到5~10 m/s,可能影响了同步对向观测,导致不能有效削弱大气折光的影响。而从较差值较小的情况1、3、4和6的天气特点来看,两岸温度和湿度并不是造成大气折光差的主要因素。通过同步对向观测,获得三角高差与水准高差来求取大气折光系数的方式,为验证约15 km长跨海高程传递中大气折光影响是可行有效的,然而在实际应用的陆与岛、岛与岛之间的跨海高程传递中,精密的水准高差值显然无法获得。但通过本次试验,至少证明在长距离的跨海高程传递中,即使通过精密三角高程法进行严密的同步对向观测,大气折光在部分恶劣天气环境下也无法完全有效消除。
4 结论
天顶距/垂直角测角误差是精密三角高程测量法进行10 km以上长距离跨海高程传递的主要误差来源,通过实例量化分析,为在海洋上的高精度高程传递工程应用提供参考。通过以下措施改进,可最大限度减少因照准误差、潮汐变化、天气环境和大气折光差等关键因素导致的影响。
(1)点位尽量选埋在地势较高的地方,并采用强制对中观测墩,配备高精度的测量仪器和自动化处理软件。
(2)选择能见度高的夜间环境进行观测,宜考虑在两岸天气条件一致、风速较小以及跨海区域潮汐变化较小的时间段内进行观测,并尽量避免冷暖空气交替时期。
(3)测量人员保持固定合理的观测姿态,确保人眼视线和仪器目镜在稳定的高度位置。
猜你喜欢
海洋技术学报(2022年1期)2022-04-25
煤气与热力(2021年10期)2021-12-02
无人机(2021年7期)2021-11-08
装饰装修天地(2020年11期)2020-07-04
奥秘(2020年1期)2020-02-26
——环地平弧&环天顶弧
奥秘(创新大赛)(2019年12期)2019-12-26
东坡赤壁诗词(2019年3期)2019-07-05
海峡姐妹(2018年8期)2018-09-08
中国绿色画报(2017年9期)2017-09-16
房地产导刊(2015年6期)2015-10-21
