
高灵敏度离子皮肤手指关节角度传感器的设计
2021-03-08 05:52:06倪娜薛晓敏张陵王垠
西安交通大学学报 2021年3期
倪娜,薛晓敏,张陵,王垠
(1.西安建筑科技大学理学院,710055,西安;2.西安交通大学土木工程系,710049,西安;3.西安交通大学航天航空学院,710049,西安;4.西安理工大学工程力学系,710048,西安)
在康复工程和人机工程中,手指运动状态可量化评估是非常重要的[1-2]。一般的运动测量系统价格昂贵,需要专业的实验室机构和数据分析技术才能完成,很难用于日常康复训练及机械手的关节运动监测[3]。为了对日常的康复运动和机械手关节运动进行有效的可量化评估,采用简单、便携而不影响关节运动的传感系统是非常必要的[4]。
电子皮肤的发展为手指运动监测提供了有利的条件。柔软的压电式[5-6]、电阻式[7-8]、离子聚合物式(IPMC)[3]、光纤式[9-10]、电容式应变传感器[11-12]均已用于手指运动的监测。例如,Sun等研制了压电电势型石墨烯应变传感器用于人类活动的监测,简单演示了手指弯曲电流的突变[5];Lu等基于石墨烯和碳纳米管研制了一种高灵敏度可拉伸的电阻式应变传感器,这种应变传感器可以穿戴在身上监测人体关节的弯曲,文中简单演示了手指关节弯曲时传感器电阻的变化[8]。大部分的电子皮肤或者离子皮肤应变传感器被穿戴在手上,只是简单地展示了手指弯曲时电信号的突变[13-15],没有定量地给出手指关节角度与输出电信号的关系,不能准确地进行手指关节角度的测量。
一些柔性传感器给出了定量的手指关节角度与输出电信号的关系。例如,Deng等设计了一种柔软的具有自供电功能的压电传感器,帮助控制人机交互系统的手势,该传感器可以测量从44°到122°的关节角度,最小测量角度变化(阈值)为10°[6];Pu等为了构建一个机器手同步控制系统,基于摩擦电技术设计了一种可定量探测关节弯曲角度、速度和方向的传感器,测量了0°到60°的角度变化,其最小测量角度变化为3.8°[16];Zhou等通过3D打印方法制备出一种基于液体金属的非对称结构电阻式应变传感器,该传感器可以监测关节的角度变化和方向,可测量角度变化范围从-70°到70°,最小测量角度变化为1°[2]。这些传感器虽然研究了手指关节角度变化与电信号的关系,但是由于受到传感材料最大拉伸率的影响,限制了关节角度可测量的范围,并且阈值有待降低。
在可拉伸性、静态力测量、制备工艺相对简单、低能量消耗等方面,柔性离子皮肤电容式应变传感器对于关节角度测量展现出很好的特性[17-19]。离子皮肤电容式应变传感器首先由Sun团队提出,2层离子凝胶电极夹着1层介电弹性体构成一种离子皮肤电容式应变传感器[11],该团队研制了由丙烯酸聚合物(VHB4905)和NaCl离子凝胶电极构成的透明、可高度拉伸的离子皮肤,其应变可达到500%。文中将其贴附在食指表面,展示了几次手指弯曲时电容的变化,手指变化了90°左右时,电容改变了13 pF左右,灵敏度大约为0.14 pF/(°)。Lei等基于矿物质水凝胶制备了具有修复功能的离子皮肤,感知了脉搏压力、手指关节变化等,手指变化约为90°,电容改变了约72 pF,灵敏度约为0.8 pF/(°)[12]。Zhang等研究了由具有瞬间自修复功能的水凝胶电极和介电弹性体构成的离子皮肤,其拉伸率可达到200%,测量手指关节角度时,手指关节变化约为90°,电容改变约为2.4 pF,灵敏度约为0.03 pF/(°)[20]。这些离子皮肤电容式应变传感器对于手指关节角度和输出电容信号的关系尚缺乏深入的理论研究,同时这些离子皮肤电容式应变传感器的灵敏度对于微操纵抓取机械手和康复训练所提出的能够灵敏地分辨出关节角度微小变化的要求仍需进一步提高。
由于这些离子皮肤电容式应变传感器均由1层介电弹性体(介电层)和其上、下表面的离子凝胶电极构成。通过改变介电层的尺寸(面积、厚度)和介电层材料的相对介电常数等手段,可以提高离子皮肤应变传感器的初始电容,从而提高离子皮肤应变传感器的灵敏度[19]。但对于实际应用和制备工艺来说,介电层面积的增加有一定的限制,传感器的介电层厚度的减少和相对介电常数的提高也有一定的限度。
为了解决手指关节运动角度的高灵敏度、大范围和低阈值的测量问题,本文探究了具有3层介电层结构形式的离子皮肤应变传感原理,基于此,构建了具有3层介电层结构形式的离子皮肤(简称3层离子皮肤)手指关节角度传感器。3层离子皮肤具有的多介电层的结构形式,其相当于将3个平行版电容器并联,可成倍提高初始电容,从而提高手指关节角度测量的灵敏度。该3层离子皮肤手指关节角度传感器可以简单地贴附在手指关节表面,当手指关节弯曲时,传感器发生应变,应变引起其电容变化,根据手指关节角度与电容信号的关系,进行手指关节角度的测量。通过理论与实验手段研究3层离子皮肤手指关节角度传感器的传感输出模型(手指关节从展平一直到完全弯曲状态),并与同类传感器的性能(灵敏度、阈值)对比分析,证实了本文设计的离子皮肤应变传感器的3层介电层结构形式对手指关节角度传感器性能的提升是显著的,益于康复训练患者或微操纵机械手的精准测量。
1 3层离子皮肤应变传感
为了探究3层离子皮肤应变传感原理,设计并制备3层离子皮肤应变传感单元,通过理论与实验手段研究其应变传感模型。
1.1 应变传感单元结构
3层离子皮肤应变传感单元为3层尺寸相同的介电弹性体被4层相同尺寸的离子凝胶电极覆盖,将隔层电极相连,形成4个电容器并联的多层结构,离子凝胶电极自带黏性,可将该多层结构黏为一体。传感单元上、下表面附着保护层,图1给出了应变传感单元结构形式。

图1 3层离子皮肤应变传感单元结构
1.2 应变传感理论模型
3层离子皮肤应变传感单元进行应变传感时,其离子凝胶电极通过电子导体与电容测量仪器相连接,形成混合离子-电子电路。由于低电压V施加于两个电子导体之间,所以没有电化学反应发生,没有电子和离子穿过电子导体和离子电极交界面,在该交界面处形成了双电层(EDL),双电层类似于平行板电容器。双电层与3个并联的覆着离子凝胶电极的介电弹性体电容器形成了串联关系。图2给出了低电压施加于两个电子导体之间时的电荷分布情况,图3为等效电路图。因此,两个电子导体之间的电容,即被测电容可以表述如下
(1)
式中:CEDL为双电层电容;Cdi为第i个介电弹性体电容器的电容。
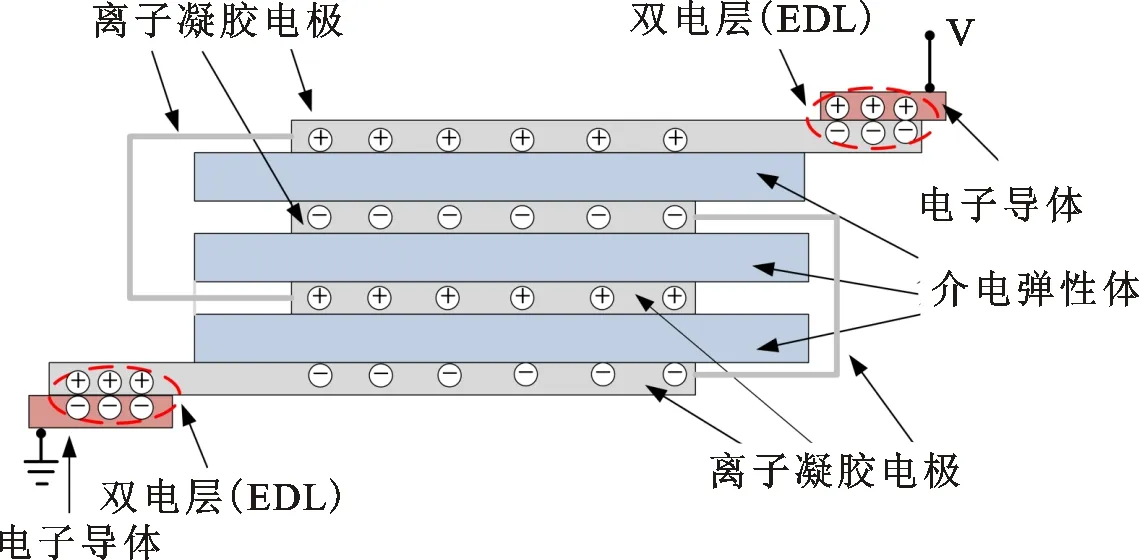
图2 3层离子皮肤应变传感单元在低电压下的电荷分布
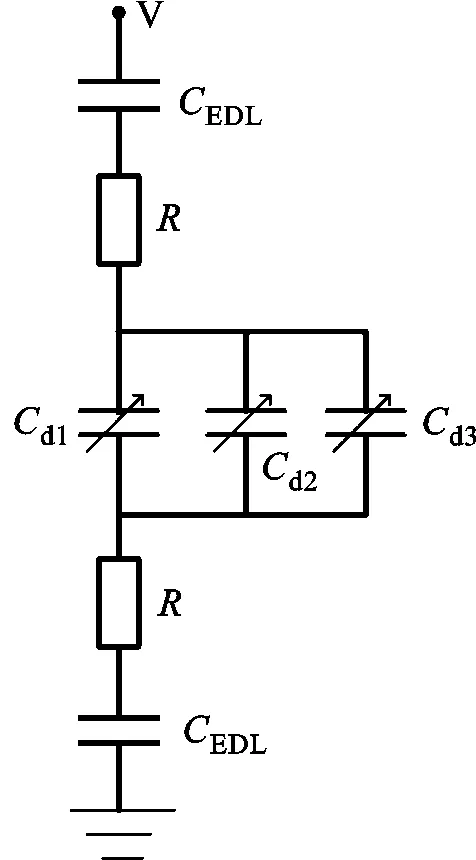
图3 3层离子皮肤应变传感单元在低电压下的等效电路
由于3个介电弹性体电容器的尺寸和材料相同,使得每个介电弹性体电容器的电容Cd也相同,具体表达式如下
Cd1=Cd2=Cd3=Cd
(2)
将式(2)代入式(1),得到通过电容测量仪测量的3层离子皮肤应变传感单元的电容可以表达为
C=3Cd/(1+6Cd/CEDL)
(3)
由于电子导体与离子凝胶电极相连接的缝隙为纳米级别,即双电层离子电荷与电子电荷之间的距离为纳米级别,远远小于被介电弹性体分开的两离子凝胶电极之间的距离,该距离即介电弹性体的厚度,一般大于10 μm。所以,单个介电弹性体电容器的电容Cd远远小于双电层的电容CEDL,即
(4)
将式(4)代入式(3),得到3层离子皮肤应变传感单元被测电容为
C≈3Cd
(5)
根据式(5),得到测量的3层离子皮肤应变传感单元未变形时的初始电容为
C0≈3C0d
(6)
式中C0d为单个介电弹性体电容器的初始电容。
将介电弹性体看作各向同性不可压缩超弹性材料,假设介电弹性体的体积和相对介电常数不变,当介电弹性体传感器被单轴拉伸的时候,单个介电弹性体电容器的电容变化量[11]能够被表达为
ΔCd=C0dεd
(7)
式中εd为介电弹性体电容器被拉伸方向的名义应变。名义应变是指介电弹性体电容器的伸长量与其初始长度的比值。
当3层离子皮肤应变传感单元被单轴拉伸时,各个介电弹性体电容器黏为一体,被同时拉伸,各层名义应变相同。综合式(6)(7),3层离子皮肤应变传感单元电容变化量ΔC(测量的电容与初始电容的差值)与名义应变关系近似可以表达为
ΔC=3C0dεd=C0εd
(8)
由式(8)可以看出,3层离子皮肤应变传感单元的灵敏度是尺寸相同的单层离子皮肤应变传感单元灵敏度的3倍。本文所指的单层离子皮肤应变传感单元是由1层介电弹性体和附着在其上、下表面的离子凝胶电极构成的。
1.3 应变传感单元制备
离子凝胶电极采用的是聚丙烯酰胺凝胶和氯化锂合成的高保水性离子凝胶电极。电极的制备过程简述如下:第1步,将丙烯酰胺和氯化锂(LiClH2O)溶入到去离子水中。丙烯酰胺的浓度为2.2 mol/L,LiClH2O的浓度为8 mol/L;第2步,依次将交联剂(N,N′-亚甲基双丙烯酰胺)、热引发剂(过硫酸铵)和催化剂(N,N,N′,N′-四甲基乙二胺)加入到混合溶液中,N,N′-亚甲基双丙烯酰胺、过硫酸铵和N,N,N′,N′-四甲基乙二胺的质量分别是丙烯酰胺的0.06%、0.17%和0.05%;最后,将配制好的溶液注入自制的玻璃模具中,放入50 ℃干燥箱中2 h,使之成胶[21]。根据文献[21]可知,制备好的离子凝胶电极在25 ℃室内放置60 h后,其失水量可以达到稳定状态。所以,本文将制备好的离子凝胶电极放置在室内120 h后,保证其失水量达到稳定状态才进行使用。离子凝胶厚度为0.25 mm。
为了便于进行拉伸试验,介电弹性体选用相对较厚和较硬的商业化硅橡胶薄膜(DG-gjb001),厚度为0.08 mm,相对介电常数为3。将离子凝胶电极和硅橡胶薄膜切割成如图4所示的形状。利用离子凝胶自带的黏性,离子凝胶电极和硅橡胶薄膜交替逐层粘贴,4层离子凝胶和3层硅橡胶构成了相当于3个电容器并联的多层离子皮肤应变传感单元。再将其上下表面附着硅橡胶薄膜,起到保护和绝缘的作用。图5为制备好的3层离子皮肤应变传感单元。

(a)硅橡胶薄膜
(b)离子凝胶电极图4 切割后的硅橡胶薄膜和离子凝胶电极
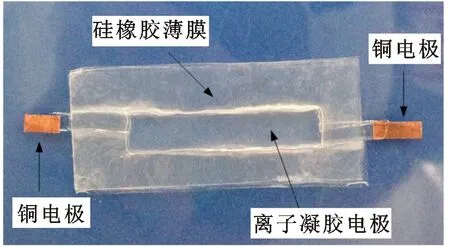
图5 制备的3层离子皮肤应变传感单元
1.4 应变传感测试
将制备好的3层离子皮肤应变传感单元通过单轴拉伸试验分析其电容变化量与名义应变的关系,对理论模型式(8)进行验证。名义应变是3层离子皮肤应变传感单元的伸长量与其初始长度的比值。
3层离子皮肤应变传感单元的最表层离子凝胶电极通过铜片和导线接入电容测量系统(Pcap01 EVA-KIT)。3层离子皮肤应变传感单元被夹持于万能试验机(CMT6530),进行单轴拉伸试验。图6为被拉伸前的3层离子皮肤应变传感单元,其长度为15 mm,宽度为5 mm,理论初始电容为74.67 pF。以7.5 mm/min的拉伸速率,将其拉伸1倍。被单轴拉伸的3层离子皮肤应变传感单元的名义应变和电容变化量的关系如图7所示,在拉伸1倍时,名义应变与电容变化量呈现线性关系,并与理论公式吻合较好。通过3层离子皮肤应变传感单元单轴拉伸试验的结果与理论模型对比,如图7所示,证实了3层离子皮肤应变传感单元单轴拉伸名义应变与电容变化量理论关系的正确性和一致性。
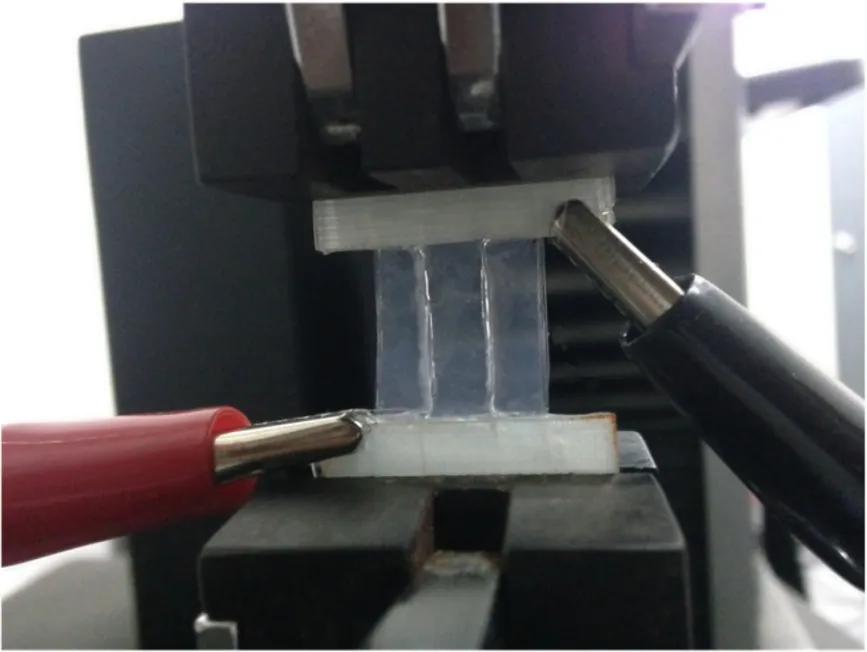
图6 3层离子皮肤应变传感单元单轴拉伸实验
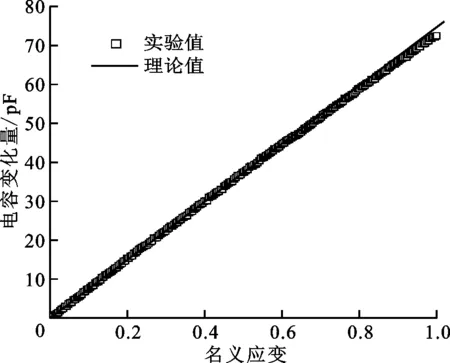
图7 3层离子皮肤应变传感单元被拉伸时的 电容变化量
2 3层离子皮肤手指关节角度传感
基于高灵敏度的3层离子皮肤应变传感模型,构建3层离子皮肤手指关节角度传感器(3层介电层)。建立3层离子皮肤手指关节角度传感器的理论模型;结合理论模型,实验研究3层离子皮肤手指关节角度传感器的输入输出关系、灵敏度、测量范围及阈值,并与单层离子皮肤手指关节角度传感器(单介电层)和其他现有传感器的灵敏度和阈值对比分析,验证3层离子皮肤手指关节角度传感器的灵敏性。
2.1 关节角度传感器结构
3层离子皮肤手指关节角度传感器的结构如图8所示,最上层介电弹性体为保护层,中间为4层离子凝胶电极夹着3层介电弹性体(硅橡胶Ecoflex 0050)构成的3层离子皮肤应变传感单元,最下层为黏结层(丙烯酸类双面胶VHB4905)。该传感器可通过黏结层(丙烯酸类双面胶VHB4905)被粘贴于食指关节处进行手指关节角度的测量。

图8 3层离子皮肤手指关节角度传感器的结构
2.2 关节角度传感理论模型
如图9a所示,O点为近端指间关节中轴点,M点为远端指间关节中轴点,N为掌指关节中轴点。当手指展平的时候,MO与ON近似在一条直线,长度为t1+t2,对应手指上表面的长度也为t1+t2。当近端指间关节弯曲的时候,手指上表面被拉伸。分别过M、O和N向手指上表面做垂线MM′、OP、OR和NN′。假设近端指间关节对应的手指弯曲上表面SPR与中节指骨和近节指骨对应的平面SM′P、SN′R平滑连续相连。近似认为中节指骨中线OM和近节指骨中线ON分别与面SM′P和面SN′R平行。根据几何关系,得到面SM′P和面SN′R的长度之和等于t1+t2。因此曲面SPR的长度即为手指从展平状态到手指关节弯曲时手指上表面增加的长度。

(a)手指整体侧视图
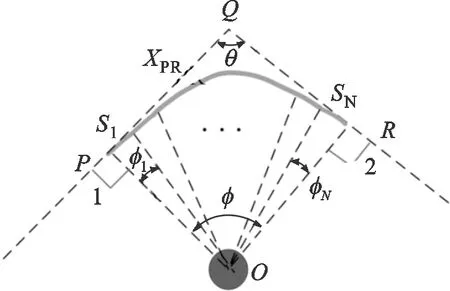
(b)近端指间关节局部放大图图9 手指近端指间关节弯曲侧视图
因为假设曲面SPR和平面SM′P、SN′R都平滑连续的相连,即每个连接处的切平面是共同的,因此手指近端指间关节角度为近节指骨和中节指骨之间的角度,用θ表示,如图9a所示。进一步假设曲面SPR的弯曲程度沿手指宽度方向一致,将三维问题简化为平面问题,曲面SPR看为曲线XPR,如图9b所示。将曲线XPR划分成N份具有不同定常曲率的曲线。Si代表第i个被划分的曲线,φi代表Si曲线所对应的中心角,ρi和ri为Si曲线所对应的常数曲率和曲率半径。
3层离子皮肤手指关节角度传感器全部覆盖在近端指间关节弯曲表面。手指关节弯曲时,由于硅橡胶薄膜和离子凝胶电极相对手指厚度较薄,假设3层离子皮肤手指关节角度传感器的每层变形一致,被拉伸的名义应变εd与手指关节上表面名义应变相同
(9)
式中:L0是3层离子皮肤手指关节角度传感器的初始长度;L是3层离子皮肤手指关节角度传感器增加的长度,即曲线XPR的长度。Li是被划分的任意曲线Si的长度,它与曲线Si所对应的中心角φi存在如下几何关系
ΔLi=riφi
(10)
式中ri为被划分任意曲线Si所对应的曲率半径。
由式(10)可以得到
(11)

由于假设关节弯曲的曲面SPR和平面SM′P、SN′R都平滑连续的相连,每个连接处的切平面是共同的。如图9所示,M′P的延长线与N′R的延长线相交于Q点,构成角θ。根据几何关系有
(12)
将式(11)(12)代入式(9),整理得到手指关节角度θ与名义应变εd的关系如下
θ=π-ξL0εd
(13)
式中ξ=α-1,由实验数据获得。根据式(8)可知,3层离子皮肤手指关节角度传感器的名义应变可以表达为
(14)
将式(14)代入式(13),得到手指关节角度与电容相对变化量C/C0的关系为
(15)
整理式(15),得到3层离子皮肤手指关节角度传感器输出ΔC与输入θ的关系为
(16)
从式(16)可知,该3层离子皮肤手指关节角度传感器的电容变化量与手指关节角度具有良好的线性关系,并且其灵敏度为-3C0d/(ξL0)。3层离子皮肤手指关节角度传感器的灵敏度是单层离子皮肤手指关节角度传感器的3倍。
2.3 关节角度传感器制备
离子凝胶电极采用的是聚丙烯酰胺凝胶和氯化锂合成的高保水性离子凝胶电极,制备方法与1.3节相同。介电弹性体采用的硅橡胶薄膜(Ecoflex 0050)的制备方法如下:按照1∶1的质量比混合A和B两种Ecoflex的预聚物,然后将混合的预聚物抽真空除去气泡,用流延机(MSK-AFA-L800)将其涂在PET薄膜上,在室温条件下放置3h令其固化,固化后的硅橡胶薄膜厚度在0.032 mm左右。使用激光切割机(Versa Laser VLS2.30)分别将硅橡胶薄膜、离子凝胶电极切割成所要求的形状。4层从PET分离下来的硅橡胶薄膜和4层离子凝胶电极交替逐层粘贴(图8),丙烯酸类双面胶(VHB4905)作为黏结层,构成3层离子皮肤手指关节角度传感器。将该传感器粘贴于食指近端指间关节处。图10a给出了穿戴在手上的3层离子皮肤手指关节角度传感器。3层离子皮肤手指关节角度传感器长为20 mm,宽为5 mm。单层离子皮肤手指关节角度传感器与3层离子皮肤手指关节角度传感器材料和尺寸相同,不同的是单层离子皮肤手指关节角度传感器是2层硅橡胶薄膜和2层离子凝胶电极交替逐层粘贴而成,如图10b所示。
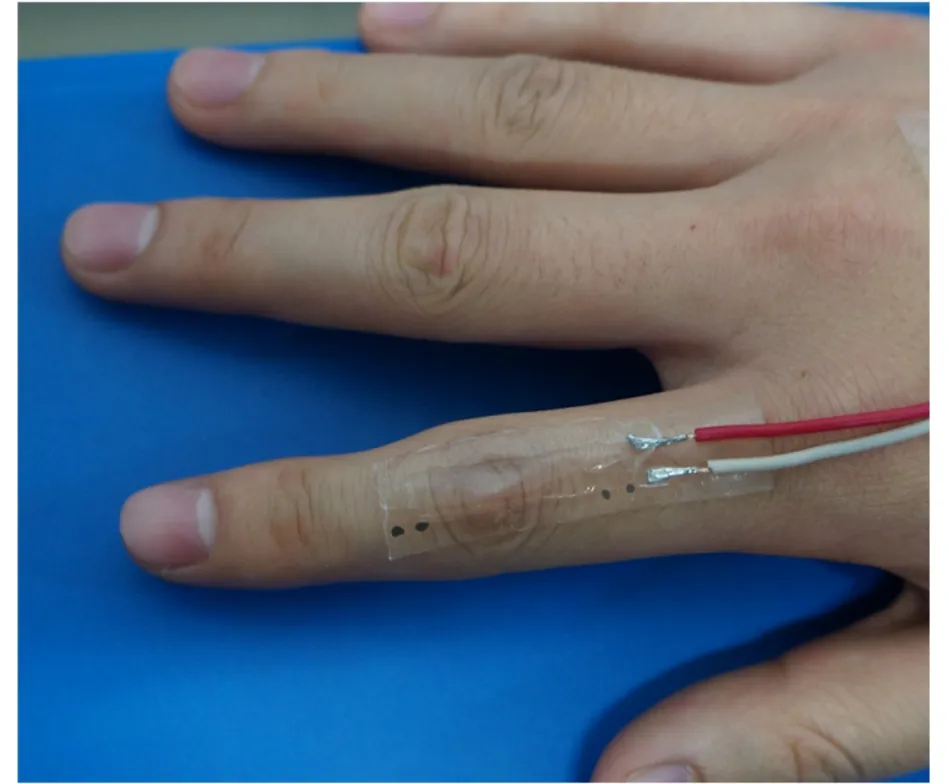
(a)3层
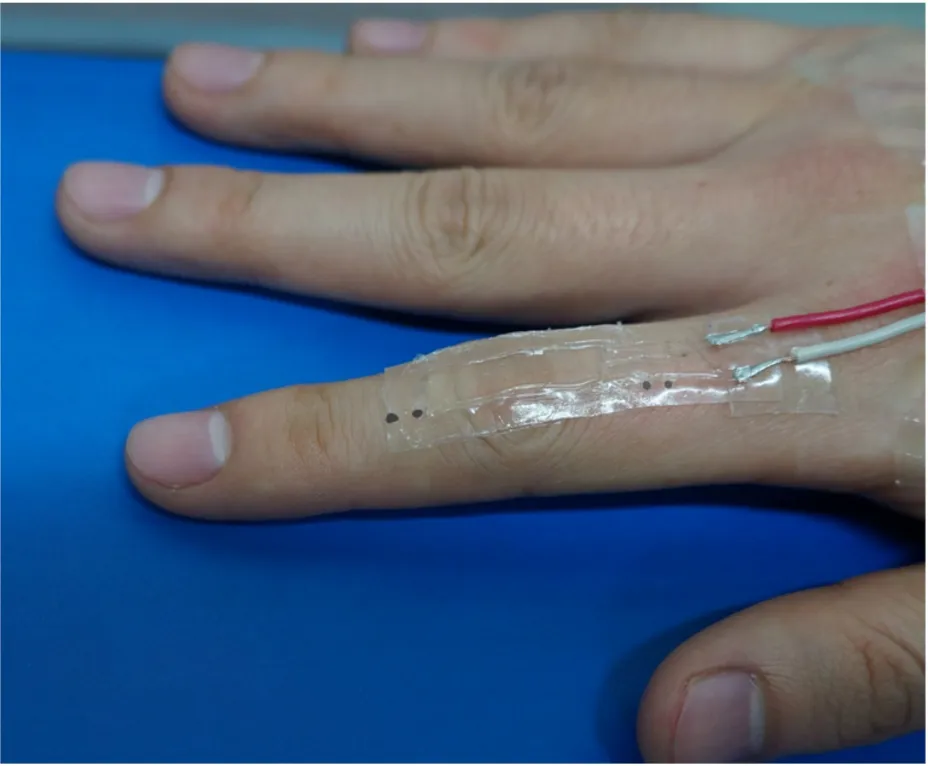
(b)单层图10 粘贴于食指近端指关节的离子皮肤 手指关节角度传感器
2.4 关节角度传感测试
为了得到3层离子皮肤手指关节角度传感器及单层离子皮肤手指关节角度传感器电容相对变化量与手指关节角度的关系,对离子皮肤手指关节角度传感器进行标定。标定系统如图11所示,标定方法如下:手指关节角度传感器输出的电容信号通过电容测量系统(Pcap01 EVA-KIT)及所带的软件进行采集并储存于计算机;手指关节角度通过运动捕获系统(相机和图像处理软件Photoshop CS6)获取,将相机固定于镜头与手指侧面垂直并同一水平面的位置,在手的位置一直保持不变的情况下,拍摄手指关节,进而用Photoshop CS6软件通过照片测量得到手指关节角度。4个点标记在食指侧面,便于运动捕获系统进行食指关节角度测量。

图11 离子皮肤手指关节角度传感器标定系统
测试中,分别穿戴单层离子皮肤手指关节角度传感器和3层离子皮肤手指关节角度传感器,食指从展平状态开始每次弯曲10°左右,一直到手指不能再弯曲为止,重复进行5次,穿戴3层离子皮肤手指关节角度传感器的手指关节角度变化如图12所示。手指每变化10°左右时,手指保持不动10 s以上的时间,便于电容测量系统和运动捕获系统的数据采集。电容数据采样频率为3 Hz。

(a)食指展平状态
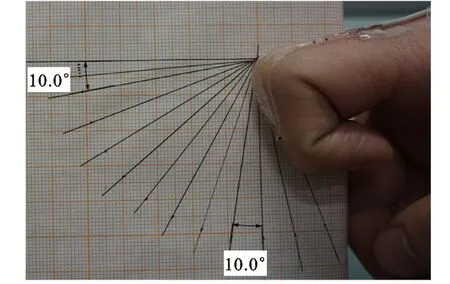
(b)食指弯曲状态图12 穿戴3层离子皮肤手指关节角度传感器的 手指关节角度变化
通过实验得到3层离子皮肤手指关节角度传感器的电容相对变化量与手指关节角度(弧度)的关系,如图13所示。二者的拟合公式为
(17)

图13 3层离子皮肤手指关节角度传感器电容相 对变化量与手指关节角度的关系
该直线拟合优度R2=0.991。拟合公式的形式与理论式(15)的形式相吻合,证实了3层离子皮肤手指关节角度传感器的电容相对变化量与关节角度具有良好的线性关系。3层离子皮肤手指关节角度传感器的长度L为0.02 m,则由实验结果可以得出手指关节角度与电容相对变化量的理论关系式(15)中的系数ξ为99.625。修正的3层离子皮肤手指关节角度传感器的电容相对变化量与被测手指关节角度的关系式为
(18)
将弧度转化为角度,得到修正的3层离子皮肤手指关节角度传感器的电容相对变化量与被测手指关节角度的关系式为
(19)
将C/C0实验值代入式(19)得出手指关节角度θ,将其与运动捕获系统测量出的手指关节角度θm进行对比,结果如图14所示,由修正的3层离子皮肤手指关节角度传感器的电容相对变化量与被测手指关节角度的关系式得出手指关节角度。从图中可以看出,由修正的关系式得出的手指关节角度与运动捕获系统所测出的手指关节角度很好地吻合,数据几乎都在θ=θm直线附近,证实了3层离子皮肤手指关节角度传感器测量的准确性。所以,3层离子皮肤手指关节角度传感器能够很好地检测手指关节角度,测量角度范围为180°(手指展平状态)到81.4°(手指完全弯曲状态)。
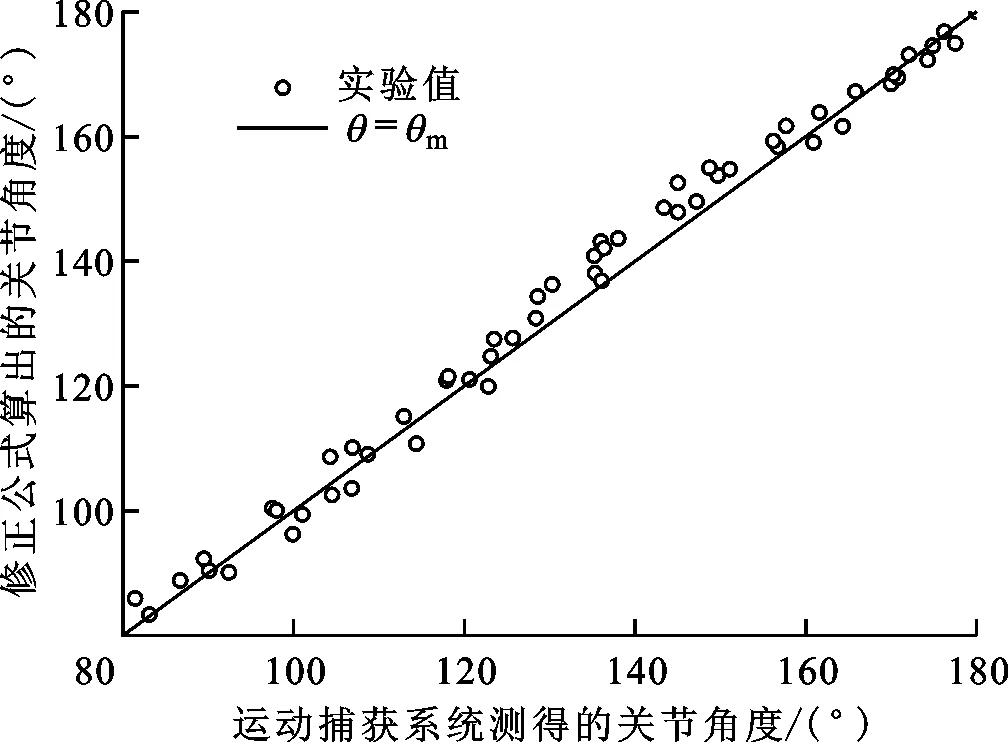
图14 修正的关系式给出的手指关节角度θ与 运动捕获系统测量角度θ m的对比
2.5 灵敏度对比分析
图15分别给出了单层和3层离子皮肤手指关节角度传感器电容变化量与手指关节角度的关系,将实验数据拟合,可以得出3层离子皮肤手指关节角度传感器的输出(电容变化量)与输入(手指关节角度)的关系为ΔC=-2.163θ+386.677,灵敏度是-2.16 pF/(°);单层离子皮肤手指关节角度传感器的输出与输入的关系为ΔC=-0.608θ+104.830,灵敏度是-0.61 pF/(°)。从理论式(16)可知,3层离子皮肤手指关节角度传感器用于手指关节角度测量的灵敏度是相同尺寸单层离子皮肤手指关节角度传感器的3倍。该3层离子皮肤手指关节角度传感器相当于3个单层离子皮肤手指关节角度传感器并联,由于尺寸相同,其灵敏度是单层的3倍。从实验结果可以看出,3层离子皮肤手指关节角度传感器的灵敏度是单层离子皮肤手指关节角度传感器的3.5倍,这与理论上的3倍存在一定误差,究其原因主要在于制作上的误差导致3层离子皮肤手指关节角度传感器与单层离子皮肤手指关节角度传感器的初始电容不是标准的3倍关系,3层离子皮肤手指关节角度传感器初始电容为249.89 pF,单层离子皮肤手指关节角度传感器初始电容为73.18 pF,3层离子皮肤手指关节角度传感器初始电容是单层的3.4倍。此外,手工制作和人工粘贴传感器于手指关节的位置也存在偏差,进而导致3层离子皮肤手指关节角度传感器的灵敏度是单层的3.5倍。总之,从理论和实验两个方面可以看出,3层离子皮肤手指关节角度传感器用于手指关节角度测量的灵敏度相对于单层的灵敏度而言有较大幅度的提高。
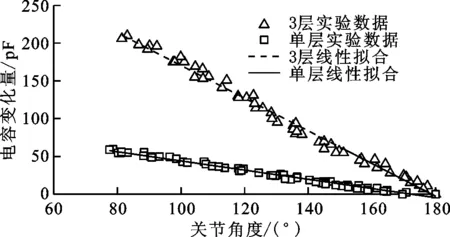
图15 3层和单层离子皮肤手指关节角度传感器 的电容变化量与手指关节角度的关系
与现有文献对比结果见表1,可见本文设计的3层离子皮肤手指关节角度传感器的灵敏度分别约是Yang等设计的运动传感器[22]灵敏度的10倍、Sun等设计的传感器[11]灵敏度的15倍、Lei等研究的传感器[12]灵敏度的2.7倍,证明本文设计的3层离子皮肤手指关节角度传感器具有相当高的灵敏度。
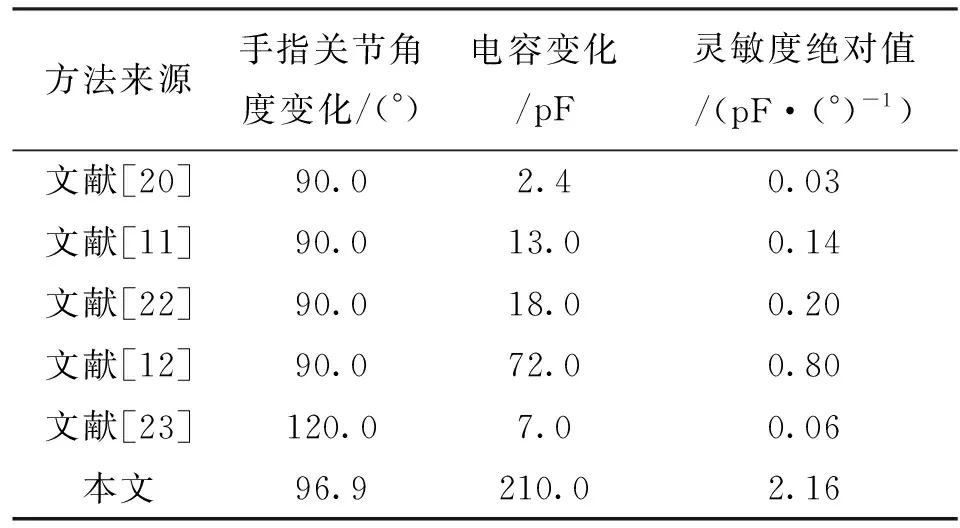
表1 不同电容式手指关节角度传感器灵敏度对比
2.6 小角度传感实验验证
为了验证3层离子皮肤手指关节角度传感器测量的灵敏性和实际可用性,首先进行手指关节小角度变化测量实验,即阈值的测量。阈值指的是当传感器的输入从0开始逐渐增加,只有达到某一最小值后,才能够测量输出的变化,这个最小值称为传感器的阈值[24]。阈值也是传感器在零点附近的分辨力。分辨力越小,传感器越灵敏。
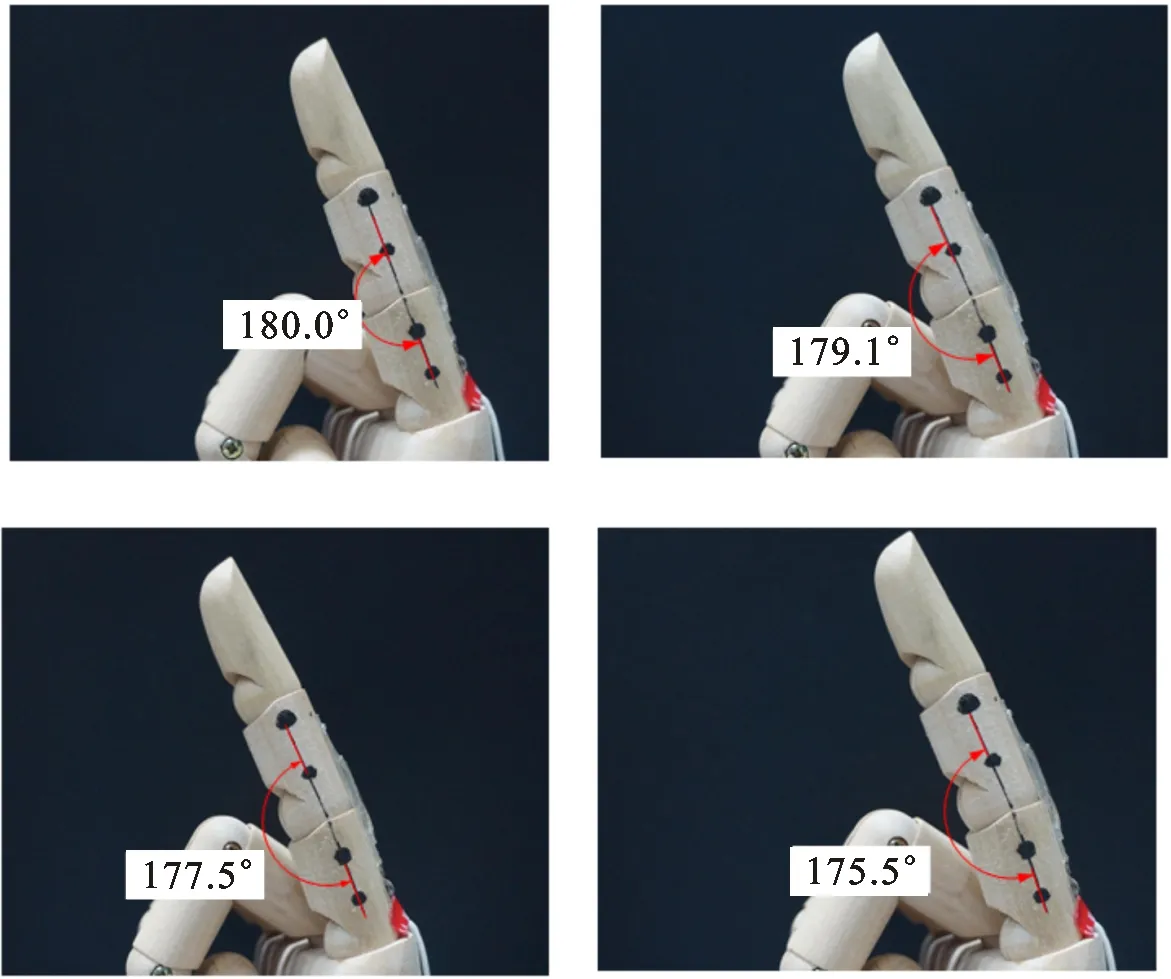
图16 食指弯曲小角度

图17 食指弯曲小角度时的电容变化量
实验观察手指关节弯曲小角度时,3层离子皮肤手指关节角度传感器的电容变化。为了便于小角度的测量,将制备的3层离子皮肤手指关节角度传感器粘贴于木质手模的食指近端指间关节处(仿成年男子,大小与前述实验真人手指大小相仿),测试方法如2.4节所述。实验前在食指侧面中线处画上黑色标记线,便于利用软件进行手指关节角度的测量。食指关节弯曲小角度情况见图16,食指关节从展平状态弯曲了3次,对应的食指关节角度为179.1°、177.5°和175.5°。弯曲后的食指关节角度对应的电容变化量如图17所示。食指关节角度变化0.9°时,3层离子皮肤手指关节角度传感器电容信号变化非常明显。因此,该3层离子皮肤手指关节角度传感器可以测量1°以下甚至更小的手指关节角度变化。所用电容测量系统(PCapØ1 EVA-KIT)最小探测电容信号变化为25 fF[25],3层离子皮肤手指关节角度传感器初始电容为249.89 pF,将它们代入式(19),得到该3层离子皮肤手指关节角度传感器理论上可探测到手指关节角度变化0.01°。将本文可测量的最小手指关节角度变化(阈值)与其他文献对比,见表2,本文的3层离子皮肤手指关节角度传感器的测量阈值更低。
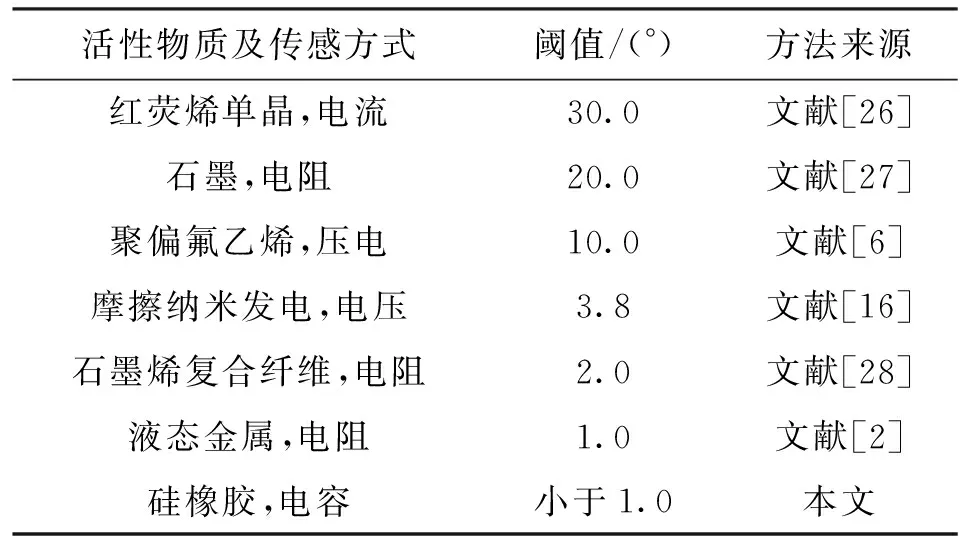
表2 不同角度传感器阈值对比

(a)轻轻握杯

(b)用力握杯图18 穿戴3层离子皮肤手指关节角度传感器的 食指握杯
在上述研究基础上,进一步验证3层离子皮肤手指关节角度传感器的实用性。为此,将3层离子皮肤手指关节角度传感器粘贴于食指关节(近端指间关节),用食指握住直径大约为10 cm的玻璃水杯,观察3层离子皮肤手指关节角度传感器的电容变化。如图18a和图18b所示,在轻轻握住与用力握住两种状态下,食指关节角度的变化很小,肉眼不能判断出食指关节角度的变化,仅仅可以通过观察手指指尖的颜色变化宏观的判断出手指是否用力;而通过3层离子皮肤手指关节角度传感器电容的明显变化可以得到手指角度的变化量(图19)。如图18b所示,由于杯身较粗,当手指紧握杯子时,手指的中间关节变得较平,即角度增大。根据式(19)可知,关节角度增大时,电容减小,这与图19中电容变化趋势一致。图19显示电容变化了7 pF左右,根据3层离子皮肤手指关节角度传感器的灵敏度2.16 pF/(°),可推算出手指关节(近端指间关节)角度从轻轻握住杯子到用力握住杯子变化了3.2°。
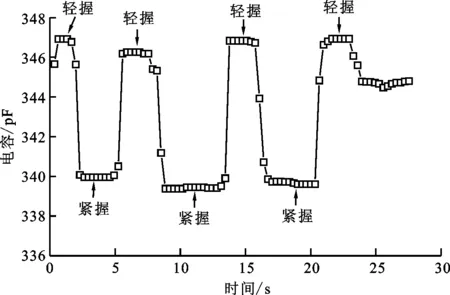
图19 轻握和紧握杯子时3层离子皮肤手指关节 角度传感器的电容
3 结 论
本文设计了一种由柔软、高度可拉伸的离子凝胶电极和硅橡胶构成的3层(多介电层)离子皮肤应变传感单元,基于此,构建了一种高灵敏度、大测量范围和低阈值的3层离子皮肤手指关节角度传感器。通过理论和实验手段研究了3层离子皮肤的应变传感模型,证实了在单轴拉伸100%内,3层离子皮肤的电容变化量与名义应变具有良好的线性关系。推导了3层离子皮肤手指关节角度传感器的传感理论模型,实验研究了该3层离子皮肤手指关节角度传感器输出电容信号与手指关节角度的定量关系。实验结果表明,该3层离子皮肤手指关节角度传感器具有高度的灵敏性,其灵敏度是单层离子皮肤手指关节角度传感器的3.5倍,也是其他同类传感器灵敏度的2倍以上。并且该3层离子皮肤手指关节角度传感器的电容变化量与关节角度具有良好的线性关系,可以监测手指关节从展平状态到完全弯曲状态的各个角度,阈值在1°以下。此外,本文制备的3层离子皮肤手指关节角度传感器柔软轻薄,不影响手指关节的运动,制作简单,价格低廉,易批量生产。因此,本文提出的多介电层结构形式的离子皮肤手指关节角度传感器在康复工程和人工抓取机械手领域具有较好的应用前景。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
实用手外科杂志(2022年2期)2022-08-31 09:48:18
小聪仔(婴儿版)(2020年12期)2021-01-26 00:54:42
电子制作(2018年23期)2018-12-26 01:01:26
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
少年科学(2015年8期)2015-08-13 22:13:01
中国舰船研究(2014年6期)2014-05-14 06:45:21
河南科技(2014年12期)2014-02-27 14:10:32
