
基于行程时间的驾驶风格贝叶斯决策树动态识别
2021-03-08 06:17:06张洪宾于祥阁陈慈李梦琦
山东理工大学学报(自然科学版) 2021年3期
张洪宾,于祥阁,陈慈,李梦琦
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
随着机动车数量的增加,交通安全问题日益突出。驾驶员因素是影响交通安全的重要因素之一,也是诱发交通事故的主要原因。驾驶员因素包括心理、生理以及驾驶行为风格,生理因素是心理因素的物质基础,并体现在心理特征上,而心理特征又直接影响人的行为风格[1-2]。驾驶风格是驾驶员对实际交通状况的态度、心理特征以及决策偏好,反映了驾驶员在车辆运行期间的行为表现。对于驾驶员来说,环境信息的识别和处理,即驾驶员的行为风格,是心态和情绪的影响结果[3-4];因此,研究驾驶风格动态识别,提高车辆安全预警及行驶安全性,对降低交通事故的发生率具有重要意义。
国内外学者对驾驶风格的分类识别进行了一定研究。Constantinescu等[5]应用主成分分析和层次聚类分析来分类和识别驾驶风格;Aljaafreh等[6]设计了一个模糊推理系统,通过使用在一定时间窗口内的车辆纵向加速度和横向加速度欧式范数以及平均车速进行驾驶风格的识别;Guo等[7]分析了不同行驶周期下的加速踏板开度及其变化率,并建立了模糊逻辑识别器来识别行驶方式;Yan等[8]提出了一种基于客观驾驶数据和脑电图数据的方法对驾驶风格进行分类;张敬磊等[9]从汽车安全辅助驾驶系统,特别是主动安全预警系统中汽车驾驶员意图、情感及其关联耦合作用等心理、意识计算问题出发,对驾驶风格问题进行了探索性研究;吴振昕等[10]基于大数据通过D-S证据理论决策融合的方法建立了驾驶风格识别模型;黄丽蓉[11]基于驾驶员行为数据,采用深度信念网络算法对驾驶风格进行识别;李立治等[12]利用k-means、模糊均值、层次聚类3种方法对驾驶风格进行分类;徐丹等[13]利用卷积神经网络对驾驶员的驾驶行为进行识别,其识别率达到了97.13%。
驾驶风格演变是驾驶员在时变动态环境中精神状态的反映。驾驶风格的演变过程无法方便、直接且准确地测量,只能在驾驶期间基于相关信息间接推算获得。已有关于驾驶风格的研究主要集中在驾驶员个性分析、驾驶员意图识别以及情感对驾驶行为的影响,关于驾驶风格演变的动态识别研究较少。本文从车辆主动安全预警技术角度出发,以驾驶风格为研究对象,利用汽车的行程时间作为特征参数,提出一种新的基于贝叶斯决策树的驾驶风格动态识别方法,并设计相应的心理测试、实车实验以及模拟驾驶实验对该方法的准确性进行验证。
1 贝叶斯决策树
1.1 决策树
决策树分类是常用的归纳分类算法,它采用从上到下的递归方法,对比决策树内部节点属性值,依据不同属性值判断节点分支,能够从一组无序、不规则的情形中推断出分类规则。
1.2 贝叶斯决策树简介
贝叶斯节点[14]是贝叶斯决策树添加到原始决策树一个新节点,它位于两个属性测试节点之间,通过贝叶斯原理进行函数计算,有此节点的决策树称为贝叶斯决策树(结构见图1)。
从上往下理顺基层常态化工作体制、人员编制和经费支持,明确基层专门工作部门、专职人员和经费预算。在工商、质监、食药监“三合一”以及知识产权、物价“五合一”,甚至商务执法、盐业执法“七合一”的市场监管体制改革背景下,全国范围内将领导小组办公室统一至市场监督管理部门,作为独立机构,通过三定方案、岗位责任和权责清单固定下来,形成条块结合的良好行政管理体系,从而激发打击侵权假冒工作的管理动力,增强打击侵权假冒工作的管理活力,提高打击侵权假冒工作的管理效力,提升打击侵权假冒工作的管理能力。

图1 贝叶斯决策树结构示意图Fig.1 Structure diagram of Bayesian decision tree
由图1可知,贝叶斯节点的取值是0或f。0表示此贝叶斯节点不用计算,可以依据条件转到下个测试节点;f表示需依据贝叶斯原理使用先验概率计算后验概率进行分类。
1.3 贝叶斯决策树算法
1)对于能用信息增益方法确切选择某个属性的分支,选取0值。信息增益值Gain(A)的计算方法[15]如下:
Gain(A)=∑((s1j+…+smj)/|S|)·
∑(sij/|Sj|lb(sij/|Sj|))-
∑si/|S|lb(si/|S|),
(1)
令pi=si/|S|,pij=sij/|Sj|,则
Gain(A)=∑((s1j+…+smj)/|S|)·
∑pijlb(pij)-∑pilb(pi),
(2)
式中:S为数据样本的集合,将S的数据样本分到m个不同类别Ci(i=1,2,…,m)中;si为Ci的样本个数;Sj(j=1,2,…,v)为用属性A(属性A具有v个不同的值{a1,a2,…,av})将S划分出的子集;sij是子集Sj中类Ci的样本数。
设{X1,X2,…,Xn}为一个待分类数据集,每个Xi具有一个或多个属性Xij(i=1,2,…,n;j=1,2,…,m);Lj(j=1,2,…,k)为划分的类别。按某种原则对Xi进行分类,若Xi无法确定分到某一类别,而是和某些类均相关,则根据先验信息P(Lj)先把它放入某一类,再根据计算出的P(Xi|Lj)和P(Xi)来计算后验概率;如果依据Xi的m个属性进行分类,且属性间是独立的,则将Xi划分为Xi1、Xi2、…、Xim,则P(Xi|Lj)可表示为
P(Xi|Lj)=P(Xi1|Lj)×P(Xi2|Lj)×
…×P(Xim|Lj)。
(3)
所以,可以计算出后验概率为
(4)
2 驾驶风格动态辨识模型
2.1 实验设计
1)心理测试
在心理测试的实验中,随机调查50名车辆驾驶员,使用心理问卷[16]对50名车辆驾驶员进行一场测试,依据心理测试结果判断所调查车辆驾驶员的静态驾驶风格的类型,并对这些类型进行分类。由于篇幅有限,只列出部分问卷调查表和问卷调查结果(见表1和表2)。
2)实车实验
(1)实验设备
如图2所示,在实车实验中所使用的设备有SG299-GPS非接触多功能测试仪、便携式生理信号测量仪、激光测距传感器等。

表1 静态驾驶风格调查问卷Tab.1 Static driving style questionnaire

表2 驾驶倾向性类型得分情况Tab.2 Score list of driver propensity type

图2 交通信息采集系统组成Fig.2 Composition of traffic information collection system
(2)实验条件
为了便于研究和获得实验数据,在天气晴朗和路面干燥的条件下进行了实验。实验时间选择在工作日进行,实验时间段是8:30-10:30,选择的道路交通繁忙但不拥堵。将50辆装载GPS的出租车作为实验样本。根据交通流定律,实验是在不影响原有交通流量的前提下进行的。
(3)实验地点

图3 实验路线Fig.3 Experimental route
选择山东省淄博市的世纪路—新村西路—南京路—人民西路为实验路线,如图3所示。两标记杆之间箭头所示的部分是实验目标路线,标记杆之间的相应部分是研究的目标部分,长度为245 m。根据实际场景中交叉口上游车道数变化的位置确定起始标记位置,根据车辆离开交叉口的位置确定结束标记位置。在实验过程中,配备交通信息采集仪器的车辆在给定路线上行驶,并记录车辆通过起始标记时的开始时间;当通过结束标记时,记录结束时间,从而获得相应路段的行程时间。在测试期间,车辆如果在两个标点杆之间停车,则记录停车时间和再次出发时间。使用高清摄像头、激光测距仪、GPS、陀螺仪等实验设备记录目标车辆及其内部和外部环境信息。
(4)数据及分析
当车辆行驶过交叉路口时,由于信号灯控制,一些车辆受到阻滞;因此,需要先在测得的车辆行程时间中去除掉延误时间,即从实际行驶时间中减去延迟时间。信号交叉口延误包括三个部分:减速延误、停车延误和加速延误。本文依据控制延误(停车延误与加、减速损失时间之和)来实现行程时间去除延误的处理。具体计算步骤如下:
(a)某一实验车到达起点标杆的时间记作t1,在实验目标路段某位置的停车时间为t2,停车后再出发时间为t3,到达终点标杆的时间为t4。那么,该实验车在实验目标路段的总行程时间T=t4-t1,停车延误时间ds=t3-t2。
(b)估算控制延误dco=ds/0.77。依据美国通行能力手册估算,其确认停车延误为控制延误的77%。
(c)去除延误之后的行程时间T′=T-dco。
对50辆实验车进行多次重复实验,共收集1 200组数据,处理后的不同驾驶员的行程时间散点分布如图4所示。
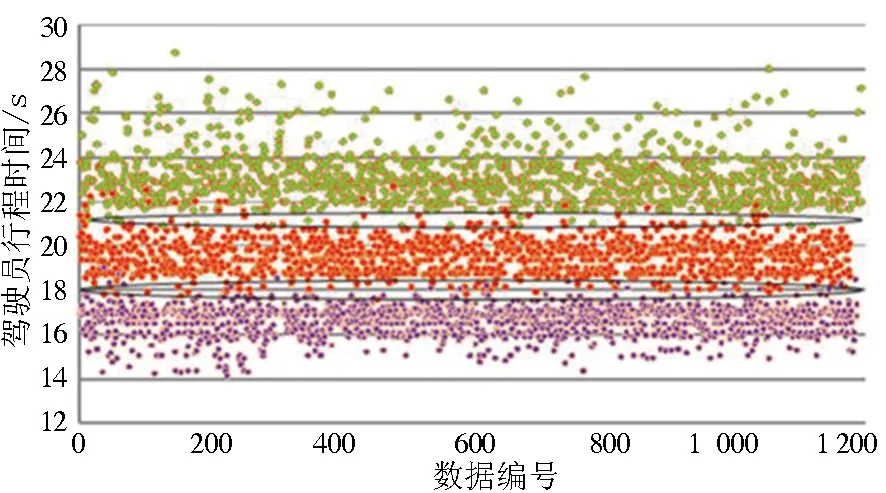
图4 驾驶员行程时间数据散点图Fig.4 Scatter plot of driver travel time
表3和图5是利用上述散点数据进行聚类分析的相关结果。

表3 最终聚类中心Tab.3 Final cluster center

图5 驾驶员聚类散点图Fig.5 Cluster scatter plot of driver
经验证显示,聚类分析确定的分类结果与心理测试结果基本一致。根据行程时间可将驾驶员分为三类:保守型、普通型和激进型。这说明,可以使用行程时间作为参数来构建合理的模型,从而实时识别和判断驾驶员的行为风格类型。
2.2 模型的建立
以贝叶斯决策树理论为基础,依据驾驶员在特定实验路段的参数,即经过延误处理后的行程时间T′,进行驾驶员的行为风格识别。将驾驶风格分为三种类型:保守、普通和激进。表4为用于识别驾驶员行为风格的属性表,图6为贝叶斯决策树。

表4 用于识别驾驶风格的属性表Tab.4 Property table for identifying driving style
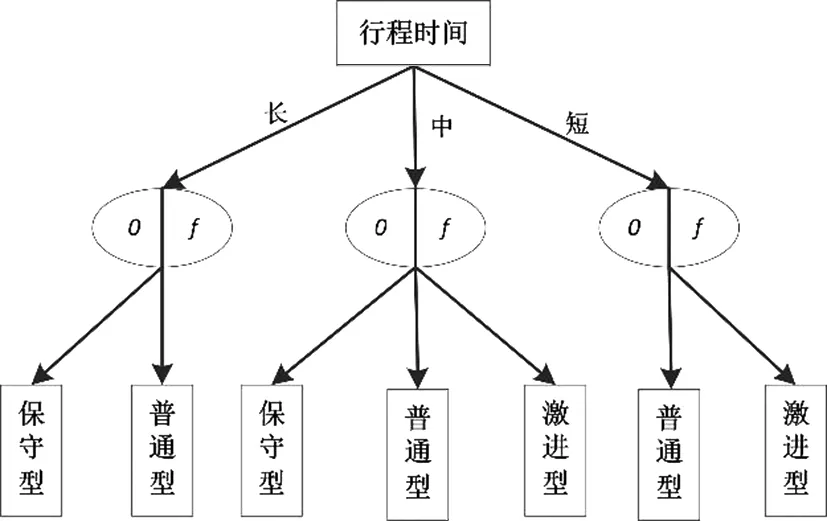
图6 驾驶风格识别的贝叶斯决策树Fig.6 Bayesian decision tree for driving style recognition
驾驶风格识别的具体过程如图7所示。训练样本集是对应于聚类数据中随机选择的30名驾驶员的实验数据样本。

图7 驾驶风格识别流程图Fig.7 Driving style recognition flow chart
3 模型验证
3.1 实车验证
利用剩余20名驾驶员的实验数据对模型进行验证,表5为模型验证的结果,百分比表示20名参与模型验证的驾驶员有相应的概率表现为该驾驶行为风格。

表5 20名驾驶员实车验证结果Tab.5 Final verification results of 20 drivers
结果表明,仅考虑驾驶员出行时间时,驾驶风格识别准确率均在70%以上,模型验证结果与心理测试结果基本一致。
3.2 模拟驾驶实验验证
在模拟驾驶实验中,使用配备日本FORUM8公司仿真软件UC-Win road ver.10的驾驶模拟器(如图8所示)进行模拟。模拟驾驶实验所用的仿真软件具有驾驶模拟功能,可设计不同的交通场景,模拟各种车型的多种行驶状况。

图8 驾驶模拟实验Fig.8 Driving simulation experiment
在实验中,所有参与实验验证的驾驶员需要在实验之前进行驾驶模拟器的操作训练,最后通过模拟驾驶实验获得相应的实验数据以验证驾驶风格识别模型的准确率。
利用构建的贝叶斯决策树动态识别模型对所得驾驶模拟实验数据进行处理,并将模型识别结果与心理测试结果进行比较(表6)。

表6 模拟驾驶实验结果Tab.6 Simulation driving test results
由表6可以看出,所建立的模型在模拟驾驶实验中的识别结果与心理测试结果之间具有较高的拟合度。
4 结论
1)本文以贝叶斯决策树分类方法为基础,建立了基于行程时间的驾驶风格动态识别模型,通过实车道路实验数据以及驾驶模拟实验数据进行的验证表明,其识别准确率达到70%以上,模型验证结果与心理问卷测试结果基本一致。
2)本文提出的驾驶风格动态识别方法具有较高的精度,可为实现以人为本的个性化车辆主动安全系统、特别是基于物联网的车辆安全技术的实现提供参考和理论基础。
3)受现有条件限制,研究中未考虑驾驶员的年龄、性别、驾龄及环境等因素引起的驾驶风格变化,在今后将增加对这些特征参数的考虑,以便与本文提出的行程时间相结合,进一步提高识别模型的准确度,更深入地研究驾驶员的行为规律。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
成都信息工程大学学报(2019年3期)2019-09-25 08:31:20
电子制作(2018年16期)2018-09-26 03:27:06
数理化解题研究(2017年4期)2017-05-04 04:07:54
中央民族大学学报(自然科学版)(2016年4期)2016-06-27 08:06:04
铁道通信信号(2016年6期)2016-06-01 12:10:20
公民与法治(2016年4期)2016-05-17 04:09:26
电子器件(2015年5期)2015-12-29 08:43:15
郑州大学学报(医学版)(2015年1期)2015-02-27 14:50:26
